基于工业机器人的配电柜主框架上下料爪手设计*
2023-09-14 06:12陈婉华
南方农机 2023年19期
陈婉华
(1.闽北职业技术学院,福建 南平 353011;2.长泰职业技术学校,福建 漳州 363000)
0 引言
随着科学技术的不断进步,我国的制造业正向着智能制造业转变[1]。近年来,工业机器人的应用普及,提高了各行各业的生产效率,特别在制造业的焊接、喷漆、装配和搬运等工序中作用显著[2-5]。工业机器人具有重复定位精度高、可靠性高、生产柔性化及自动化程度高等优势,与人工相比,能够极大地提高生产效率和产品品质。因此,实际生产流水线中,很多企业采用工业机器人代替人工装配,提高了生产的安全性和工作效率。其中,爪手是安装在工业机器人末端的执行器,与被抓取对象直接接触,不仅要稳定抓取物件,而且不能对物件造成损伤。对于不同形状物件,其爪手机构有所差异,因此设计合理的爪手机构是顺利完成指定工序的前提。马立军[6]设计了一条多品种低压开关设备混线生产的自动生产线,解决柜体装配方式效率低和装配工序劳动强度大等问题,能够在不停机的情况下实现四大类低压开关设备的装配能力,改变了低压开关设备传统的“垂直”作业方式,实现在“水平”旋转下安全、高效进行柜体装配作业。王德佳[7]探讨机械人在组装生产线中的最佳配置,得出在考虑生产成本、产品质量等因素的情况下,采用人机混合配置的半自动化组装作业效果最佳。任军辉等[8]基于UG对机器人末端执行器进行设计和运动仿真,设计了一款爪手位置角度可调的工业机器人爪手,结果表明,该工业机器人爪手结构紧凑,爪手角度调节方便,可以抓取多种形状物体。孙庭伟[9]设计了一款适配多尺寸缸筒的机器人爪手机构,能够抓取多种规格的缸筒零部件,实际验证表明,该机器人爪手机构工作具有良好的可靠性。
本文设计一种适用于不同规格尺寸配电柜主框架上下料的爪手机构,通过在工业机器人末端增加气动磁性吸盘的方式,实现配电柜主框架快速、稳定抓取,提高框架装配的工作效率和产品质量,为升级自动化和无人化装配提供一种多功能爪手机构的技术方案。
1 配电柜主框架结构尺寸
1.1 装配要求
该工业机器人爪手的抓取对象是配电柜主框架,对主框架装配的形位公差要求[10]:1)装配好后的A面框架与B面框架对角误差为±1.5 mm;2)连接杆的直线度为≤0.3 mm/m;3)装配好的各连接杆衔接处位置度公差为±0.5 mm。
1.2 配电柜主框架结构
根据实际需要装配某配电柜的主框架,该主框架主要由A面框架、B面框架以及连接杆等组成。其结构尺寸示意图,如图1所示。
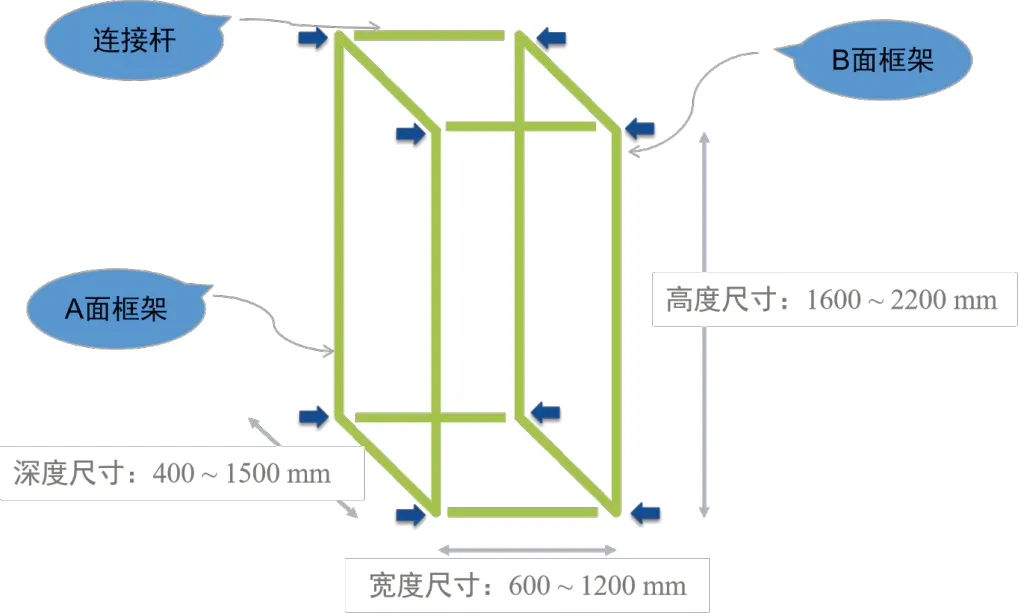
图1 配电柜主框架结构尺寸示意图
2 配电柜主框架上下料爪手设计
2.1 上下料爪手总体设计方案
为了实现配电柜主框架的自动化上下料,根据不同规格尺寸配电柜的主框架,设计了抓取主框架的上下料爪手机构,主要包括爪手主体、机器人连接法兰和气动磁性吸盘等,并将爪手机构装配在FANUC 6轴关节机器人末端执行部件上,此机器人内置iRVision智能视觉系统和机器人安全策略系统等。工业机器人爪手的主要作用是从物料架上抓取A面框架、B面框架,并将其运送至指定位置进行压装。气动磁性吸盘的主要作用是采用磁力吸附的方法,抓取不同规格尺寸配电柜的主框架,并且能够实现稳定及无夹痕抓取,提高工作效率及产品装配质量。应用SolidWorks 2016软件对配电柜主框架的上下料爪手机构进行整体结构设计,其示意图如图2所示。
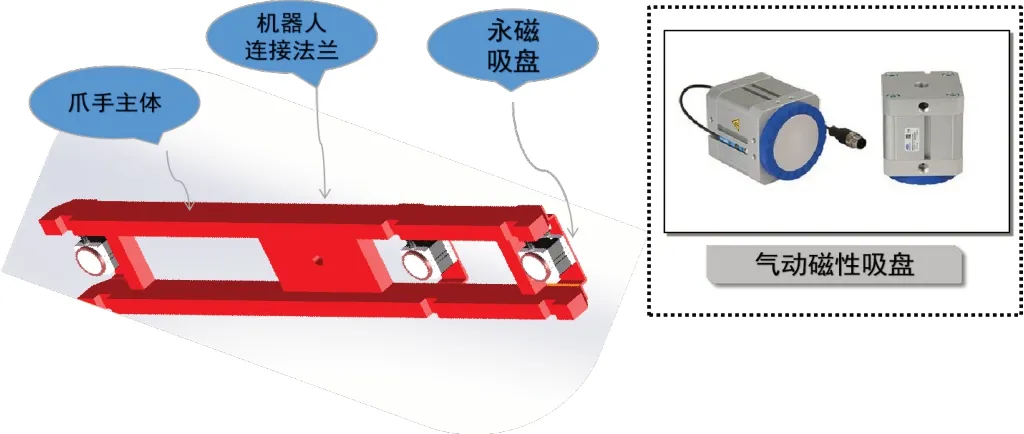
图2 配电柜主框架的上下料爪手机构示意图
2.2 关键零部件设计及选型
工业机器人、爪手主体和物料拾取器是上下料爪手机构设计的关键零部件。结合抓取配电柜主框架的实际需求,本文工业机器人选用FANUC Robot R-2000iC/165F(上海发那科机器人有限公司),该设备主要参数:控制轴数为6轴、可搬运质量为165 kg、重复定位精度为±0.2 mm。该设备的优点:可实现柔性化智能生产,能够通过机器人视觉提高识别物料的准确率,留有可扩展性接口供用户使用等。物料拾取器选用气动磁性吸盘SGM-70(穆泽工业控制系统(上海)有限公司),该部件主要参数:处理器速度为36 V,功率为85 W,吸力为290 N。该部件的优点:带有磁性夹具,用于处理配电柜主框架带孔的金属板;利用永磁吸取磁性工件,安全可靠;结构紧凑,安装便捷等。
爪手主体及连接法兰是工业机器人爪手机构的基础部件,为其他零部件装配提供支撑和连接作用。其中,连接法兰一端连接爪手主体,另外一端连接工业机器人第6轴的末端,采用8个M10螺栓连接固定,确保爪手主体和工业机器人的装配相对紧固。爪手主体选用Q235钢通过焊接而成,形状近似U型切槽,既能够满足抓取不同规格尺寸框架的要求,又能保证爪手主体的强度载荷。工业机器人及连接法兰实物图,如图3所示。
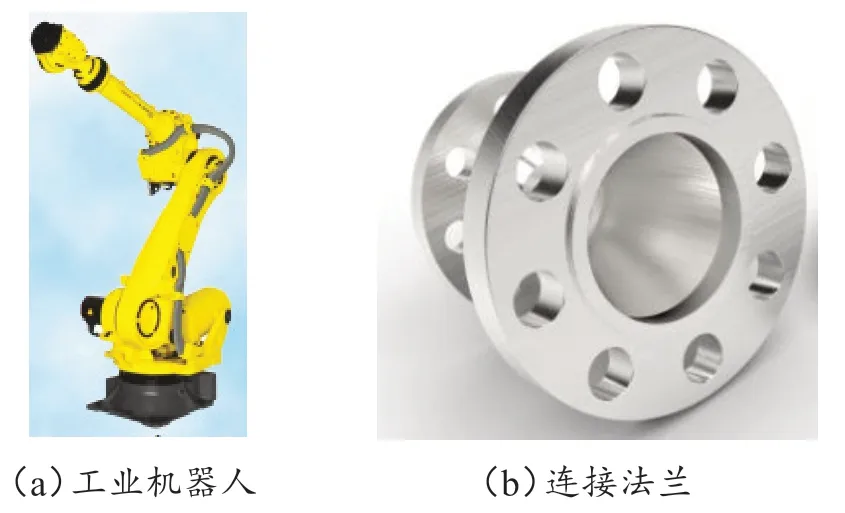
图3 工业机器人及连接法兰实物图
2.3 工业机器人智能视觉系统及安全系统
上下料爪手机构装配在FANUC 6轴机器人末端执行部件上,该工业机器人内置iRVision智能视觉系统及机器人安全策略系统等。其中,智能视觉设备直接连接到工业机器人进行控制,在没有工业PC机的条件下可以正常运行,同样,视觉功能软件也直接集成到工业机器人系统中,便于操作者进行视觉编程。为了能够方便进行视觉功能软件参数设定和运行状况的观察,采用示教器画面进行实时显示。考虑到操作人员的人身安全,需要在工业机器人中嵌入安全策略系统。当工业机器人系统运行出现异常时,通过设置不同的安全干预模式来适应实际生产需求,比如循环停止、紧急暂停和请求进入等功能。工业机器人内置视觉系统示意图及系统控制流程图,如图4所示。
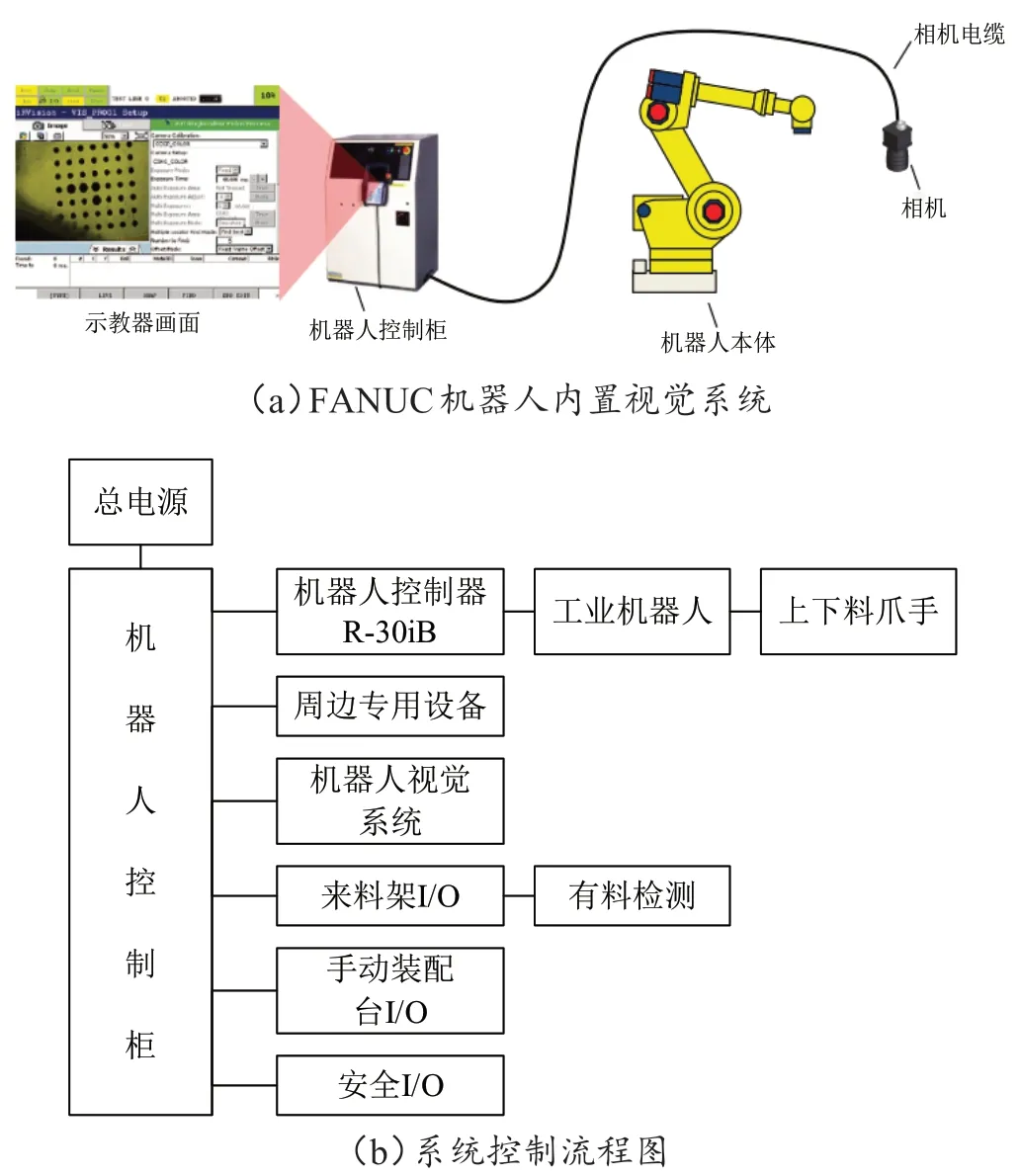
图4 工业机器人内置视觉系统示意图及系统控制流程图
3 结论
本研究以配电柜主框架作为对象,设计了一种适用于不同规格尺寸配电柜主框架的上下料爪手机构。该上下料爪手机构主要由爪手主体、机器人连接法兰和气动磁性吸盘等组成。同时,整台设备内配备有智能视觉系统及安全系统,可实现上下料抓取动作全程可视化和操作安全可靠。
本文利用工业机器人的工作效率高、灵活度大、操作稳定性好以及可扩展性强等优势,通过连接法兰将工业机器人与爪手机构进行集成创新。研究结果表明:FANUC机器人配上自主设计上下料爪手机构的末端执行器,可以根据配电柜主框架尺寸大小调整气动磁性吸盘位置来快速抓取主框架,有效降低了人工装配时间成本,提高了生产质量和生产稳定性,满足了企业对不同规格尺寸配电柜主框架进行大规模装配的需求,为柜体框架装配提供了一种适用于不同规格尺寸框架的创新智能抓取机构。
猜你喜欢
农村电气化(2022年7期)2022-07-19
汽车维修与保养(2021年12期)2021-03-08
汽车维修与保养(2020年10期)2021-01-22
家园·电力与科技(2021年9期)2021-01-06
中国设备工程(2019年22期)2019-01-16
军事文摘·科学少年(2017年4期)2017-06-20
材料科学与工程学报(2016年2期)2017-01-15
现代制造技术与装备(2015年4期)2015-12-23
电测与仪表(2015年1期)2015-04-09
警察技术(2015年4期)2015-02-27