一种坦克炮长瞄准镜系统状态评估的方法
2023-09-07 10:18:06解宝琦李英顺王德彪隋欢欢
兵工学报 2023年8期
解宝琦, 李英顺, 王德彪, 隋欢欢
(1.广西科技大学 电气电子与计算机科学学院, 广西 柳州 545000; 2.大连理工大学 控制科学与工程学院, 辽宁 大连 116200;3.沈阳顺义科技有限公司, 辽宁 沈阳 110027)
0 引言
随着军事领域的高速发展,装备系统的集成化、信息化程度不断的提高,带来了一系列新的故障问题,传统装备故障检测和维修保障已不能满足其维修保障的需求,坦克火控系统在这方面表现尤为明显。炮长瞄准镜系统作为坦克输出主要来源之一,是其中重要的组成部分,为其设计专门的状态评估系统[1-2],能够提高系统的可靠性和可用性。
目前,常用的装备健康状态评估算法可以分为模型计算法、机器学习法和评估分析法[3]。模型计算法通过构建一个融合计算模型或者比较模型计算出装备的健康度,其中组合赋权法被不断地应用于健康状态评估领域。文献[4]通过组合赋权法确定权重,在根据灰云聚类融合方法和最小二乘法进行立磨机的健康度评估。然而,因为装备监测数据问题使得数学模型难以确定。机器学习法通过大量数据训练各种机器学习进行装备状态评估。近些年来国内外越来越多的学者将各种各样的神经网络应用到健康状态评估上[5-7],其中自组织映射(SOM)神经网络因其具有抗噪声干扰能力强的特点,使得其在健康状态评估上的取得了较好的效果[8-9]。评估分析法在健康状态评估的应用也越来越广泛,模糊理论[10]和证据理论[11-16]是其中比较成熟的方法,在装备状态评估中已经得到较多的应用。此外,一种将统计数学和模糊数学相结合的云模型[17-20]在状态评估也有一定应用,纵观现有文献云模型在评估的例子还不多,值得深入研究。
为建立一种准确、高效、客观的坦克炮长瞄准镜系统的健康状态评估,本文针对坦克炮长瞄准镜系统在健康状态评估工作中存在的问题,提出一种改进云模型相结合的健康状态评估算法。一方面考虑到炮长瞄准镜系统信号复杂的问题,采用组合赋权法确定系统各个指标权重。另一方面,针对现有方法主要通过专家评价确定指标阈值的问题,建立SOM神经网络对系统运行数据进行聚类,根据聚类结果确定各个指标阈值,用于确定云模型的云化区间。同时,考虑到相邻状态的连续性和模糊性,通过改进云模型构建状态评估模型,并引入超熵用于坦克炮长瞄准镜系统在健康状态等级的评估等级结果判定。
1 评价指标权重确定方法
1.1 改进模糊层次分析法
本文采用相对于与传统层次分析法(AHP)计算精度更高的模糊层次分析法(FAHP)[13-14]并引入更符合人类的思维模式的决策机制的三标度法对其进行改进。其具体过程如下:
1) 通过三标度法[15]构建优先判断矩阵F=(fij)n×n,i,j=1,2,…,n,F=(fij)n×n为模糊判断矩阵,fij为根据指标i与指标j的比较取值(见表1)。

表1 模糊判断矩阵比较取值
2) 根据模糊判断矩阵,求得模糊一致性判断矩阵R=(rij)n×n,其中rij公式为
(1)
3) 将R=(rij)n×n转换为互反型矩阵E=(eij)n×n,其中:
(2)
4) 通过归一法计算出权重向量W(0),其中:
(3)
5) 通过特征值法将 经过迭代进一步计算出更精确的权重向量[10]。
1.2 改进熵权法
熵权法是利用评估指标的信息熵计算各个指标客观权重的方法。为了避免评价过程中,可能造成的权重失真[17]的问题,本文对熵权法进行改进。其具体过程如下:
1) 根据指标体系构建评价指标矩阵Q=(qij)n×m,i=1,2,…,n,j=1,2,…,m,其中qij为第j个指标的第i个实际值。
2) 对评价指标矩阵Q进行一致化处理消除纲量得到标准矩阵P=(pij)n×m,其中pij为
(4)
计算评价指标的信息熵Ej,计算公式为
(5)
3) 通过式(5)计算出第j个指标的权重wj,计算公式为
(6)
针对熵权法存在的问题对式(6)进行改进,计算公式为
(7)
1.3 组合赋权法
组合赋权法是一种既能包容主观赋权法因专家意愿的主观性,又能忽略客观赋权法因过于依赖数据局限性的方法。为此,本文提出一种基于改进博弈论法的组合赋权法。
针对博弈论法在计算组合权重时可能会出现权重系数为负数的情况。本文通过加入约束条件建立最优化模型对传统博弈论法进行改进[18],具体步骤如下:
1) 由目标函数以及约束条件,建立最优化模型。
(8)
式中:aj为组合权重系数;wi、wj分别为主、客观权重向量。
2) 构建拉格朗日函数。

(9)
3) 对(9)求偏导,由极值条件可得由计算可得组合系数为
(10)
(11)
5) 由组合赋权法可得最终权重w*T为
(12)
2 基于改进云模型的装备状态评估
2.1 装备状态等级特征
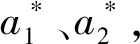
随着装备技术和维修理论的发展,采用故障和正常二值函数来描述装备的技术,已难以满足实际需求,因此从生物领域引用健康状态来描述复杂装备所处的工作状态,依据健康状态分级原则,从健康管理的角度将装备技术状态分为5个等级。装备健康等级描述如表2健康状态等级描述所示。
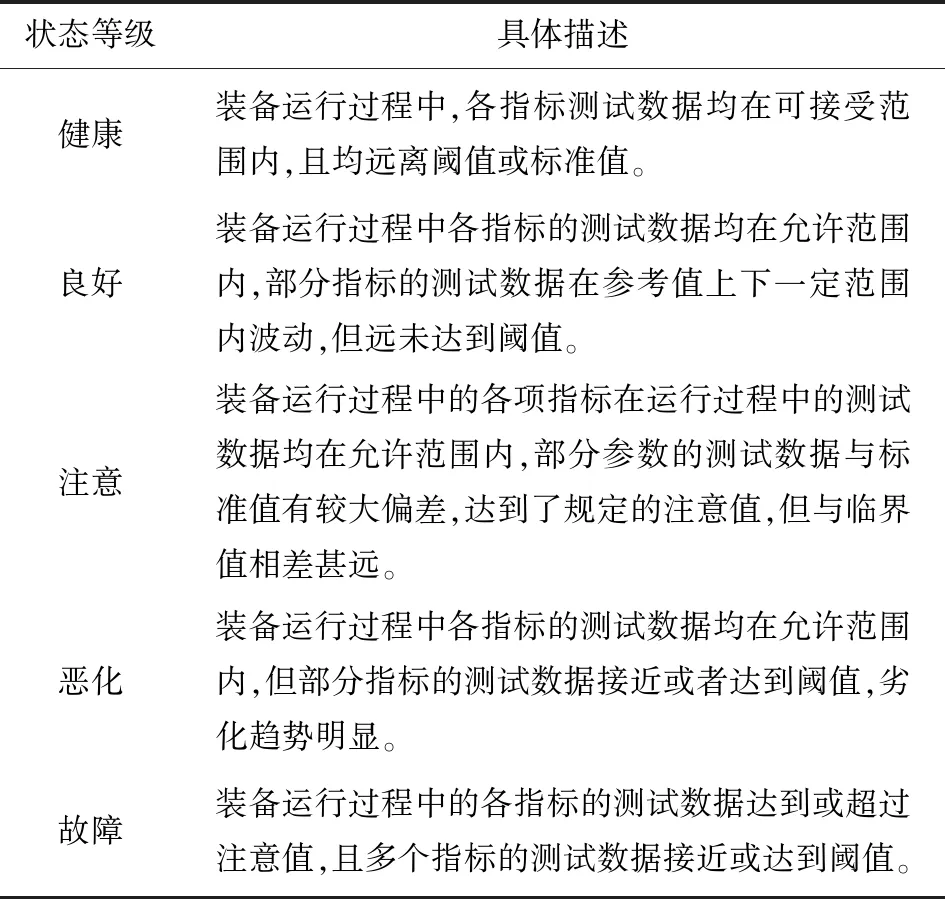
表2 健康状态等级描述
2.2 基于SOM神经网络确定状态等级的云化区间
根据如表2所示将经过归一化后的装备状态数据分为健康、良好、注意、恶化和故障这5个数值区间,其中1为故障,0为健康。在将状态等级云概念化,确定对应状态的云化区间,再将计算出的云重心代入到云评估模型中,得到装备状态等级。
目前,状态评估区间大多仅是通过多名维修专家进行打分确定,这样使得结果受到主观人为影响。针对该问题,本文根据装备运行过程的测试数据,通过SOM神经网络进行聚类,再根据聚类结果确定各指标阈值,进而确定等级云化区间参数。
SOM是一种能够进行自组织、自适应地改变网络参数与结构的无监督学习网络。其能够很好地处理非线性数据,并具有抗噪声干扰能力强的优点。
SOM神经网络结构如图1所示,主要通过竞争层基于输入层对输入数据的响应程度竞争输出得到输入数据的拓扑网络分布,根据获胜神经元对附近神经元的影响程度实现聚类,具体过程如下:
图1 SOM神经网络结构示意图
1) 初始化设置。对输入数据进行归一化处理后,设置竞争层初始权重向量wi,确定拓扑邻域半径σ0以及初始学习率η0。
2) 确定获胜神经元。根据输入向量xi与权重向量wi最小欧式距离确定获胜神经元i(x):
i(x)=‖xi-wi‖
(13)
3) 更新学习率和拓扑邻域半径,并确定以获胜神经元为中心拓扑邻域N(t)。更新后,学习率η(t)、拓扑邻域半径σ(t)及拓扑邻域N(t)分别为
η(t)=η0×e-t/(T/3)
(14)
σ(t)=σ0×e-t/((T/3)/lnσ0)
(15)
N(t)=e-‖wi-wi(x)‖2)/2(σ(t))2
(16)
式中:t为当前训练次数;T为总训练次数。
4) 更新权重向量。
wij(t+1)=wij(t)+η(t)×N(t)×(xk-wij(t))
(17)
式中:xk为第k个输入数据。
5) 判断是否收敛。如果达到预设迭代次数,结束训练,否则进行下一次训练。
根据SOM神经网络聚类结果确定如表3所示的状态等级云化区间定义,表3中a、b、c、d分别为各个状态等级的转折阈值。
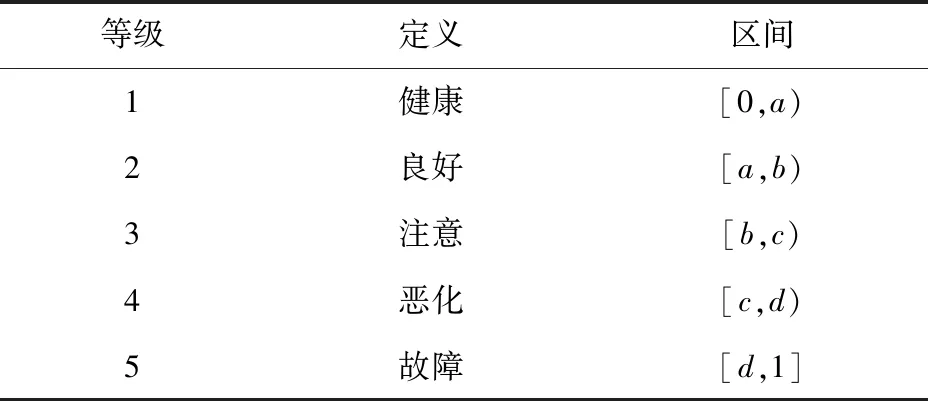
表3 状态等级的云化区间定义
2.3 云模型的建立
云模型将统计数学和模糊数学相结合,实现了定性概念和定量描述的自然转化[20]。目前,云模型已经成功的应用在大系统的效能评估、智能控制等众多领域。
2.3.1 云模型的定义
假设C是定量论域U上的定性概念,若x∈U是C的一次随机实现,并且x对C的隶属度μ(x)∈[0,1]是有稳态分布的随机数:
μ(x)∶U→[0,1]∀x∈U
(18)
则称x在定量论域U上的分布为云模型,每一个x为一个云滴其中μ(x)能够反映x对C的隶属度。
云模型将一个定性概念由期望、熵和超熵共同表达,反映概念的不确定性。并且将模糊性和随机性集成到一起,构成定量与定性相互间的映射关系,其数字特征曲线如图2所示。图2中,En为熵,He为超熵,通常取任意常数。
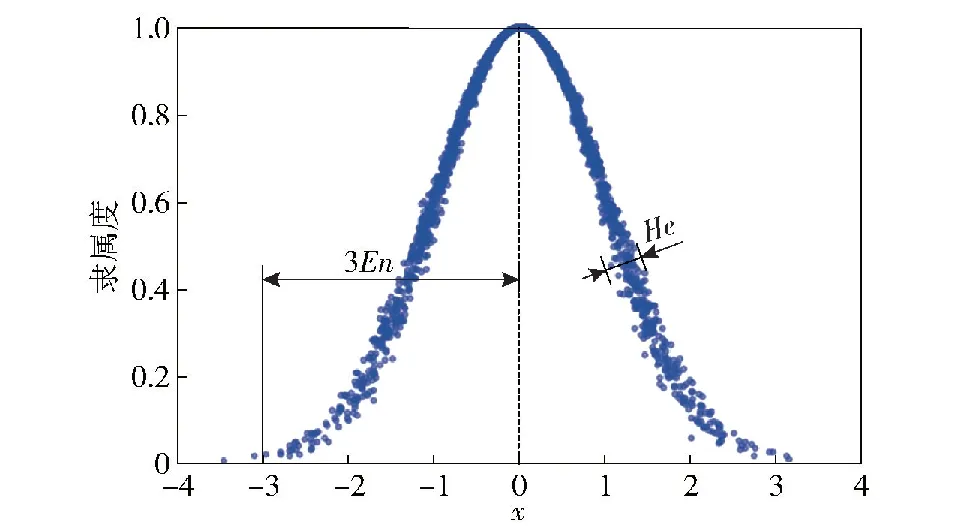
图2 云模型数字特征曲线
2.3.2 云模型各参数确定方法
由组合权重与SOM神经网络计算出的指标阈值合理求得云化区间后,需要根据合理的方法确定云模型的(Ex,En,He)这3个数字特征,生成多维评价云模型,Ex为期望。设装备某一状态的云化区间定性概念描述为[a,b],传统云模型的3个数字特征参数的求解过程如下:
(19)
2.3.2.1 熵的确定方法
由式(19)可知,传统云模型的云滴的生成是基于3En法则生成的。这种方式生成的云模型,其云区间内的云滴贡献率通常可以达到99%以上,这就说明,若采用基于3En法则构建装备状态云模型,那么相邻的云之间基本不会出现重叠[21]。而实际情况下,相邻的两个装备状态等级之间存在着一定的连续性和模糊性。因此,各状态等级的评价云之间通常是存在交集的,显然这种方式与实际评估不相适应。
为解决上述问题,本文分别计算云滴x分别在Ex+En、Ex+2En和Ex+3En处的隶属度并进行对比,其隶属分别为:μ(Ex+En)≈0.607,μ(Ex+2En)≈0.135,μ(Ex+3En)≈0。
由此可知云滴x分别在[Ex-En]∪[Ex+En]、[Ex-2En]∪[Ex+2En]、[Ex-3En]∪[Ex+3En]上对定性概念依次变弱。根据计算结果分析可知,在Ex+2En处的隶属度为0.15,说明在该处附近的云滴相对于相邻的两个评价云的隶属度均较弱,并且难以根据隶属关系直观进行判断,能够较好地表示相邻的两个装备状态等级之间的连续性和模糊性。此外,根据以上结论采用基于2En法则生的云模型,其云区间内的云滴的贡献率也达到了95.44%,说明基于2En法则的评价云仍然可行。因此,采用改进的2En法则相对传统云模型更加贴合实际。
由2.2节可知装备状态共分为5个等级,当等级i为2、3、4时评价云为完整云模型,其期望Exi和熵En求解过程为
(20)
当等级i为1或者5时评价云采用半云模型,其期望Exi和熵Eni求解过程为
(21)
2.3.2.2 超熵的确定方法
云模型的超熵并没有确定的取值方法,由文献[22]可知,当超熵He较大,云会发生雾化。文献中指出,当He
2.3.3 炮长瞄准镜系统状态评估流程
基于云重心的装备状态评估是一种利用构建对应等级的云图进行评估的方法。其具体流程如下:
1) 通过SOM神经网络计算出各指标状态等级[23]的阈值进而确定云化区间;
2) 利用组合赋权法确定各个指标权重;
3) 根据状态等级的云化区间和指标权重,构建各个状态等级的云模型;
4) 根据各个指标的权重计算出云重心,得出评分值。
5) 激活云发生器,确定坦克炮长瞄准镜系统的状态评估等级。
2.3.4 评估流程评估等级的确定
若加权综合权重得到的云重心位置为xa,由云模型性质可知xa与各个评价云对于的隶属度μi(xa)为
(22)
当xa位于两片评价云之间时,单单依靠μi(xa)很难判断装备状态等级。针对该问题,本文通过引入云模型在xa处的超熵进行判断。
设相邻两装备状态评价云的数值特征分别为TCi=(Exi,Eni,Hei)与TCi+1=(Exi+1,Eni+1,Hei+1)以及在xa处的隶属度μi(xa)和μi+1(xa)。若|μi(xa)-μi+1(xa)|<δ(δ为阈值,通常取0.1),即xa位于两片评价云之间时,通过激发逆向云发生器[24-26]。对装备状态进行判断,其判断流程如下:
1) 确定评价云在xa处的云滴个数n。



3 实例分析
由于炮长瞄准镜系统结构复杂,信号繁多,受篇幅限制无法对炮长瞄准镜系统整体做状态评估,故本文以某型坦克上反射镜平台力矩电机为实例对象。以上反射镜发生碰框时力矩电机的运行状态为例对本文的算法进行验证。
炮长瞄准镜系统的上反射镜力矩电机主要分为垂直控制力矩电机模块、水平控制力矩电机模块和电源模块3个模块,垂直控制力矩电机模块和水平控制力矩电机模块分别由瞄准镜控制盒中的垂直控制板和水平控制板控制,电源信号模块主要负责电机、垂直控制板和水平控制板的供电,控制板的工作主要负责观瞄系统工况的选择,装表信号的输入和输出以及瞄准镜碰框的信号反馈。由层次分析可得上反射镜碰框时力矩电机运行状况层次分解图,如图3所示。

图3 上反射镜碰框时力矩电机运行状况层次图
3.1 评估流程评估等级的确定
3.1.1 主观权重的确定

综上所述,结合1级指标权重和2级指标权重得到各个指标相对于上反射镜碰框时力矩电机运行状况的主观权重w1为

3.1.2 客观权重的确定
由于不同指标的大小和数量级之间存在差异,在确定各个指标的客观权重前,首先,对各个指标参数通过式(23)进行归一化处理:
(23)
式中:max{xij}、min{xij}分别为指标x的信号值的最大值和最小值。
选取一台已知状态的某型坦克炮长瞄准镜系统的上反射镜力矩电机分别在稳像工况和装表工况条件下的10组监测数据进行评估,归一化处理后的数据如表4所示。

表4 试验测试数据归一化
根据表4数据,由本文采用的改进熵权法确定各个指标的客观权重w2为

3.1.3 组合权重的确定
由上述所求主观权重w1和的客观权重w2,由式(12)分别计算出主、客观权重的综合权重,最后根据式(13)确定各个指标最终权重w:

3.2 装备状态云模型化
3.2.1 确定状态等级的云化区间

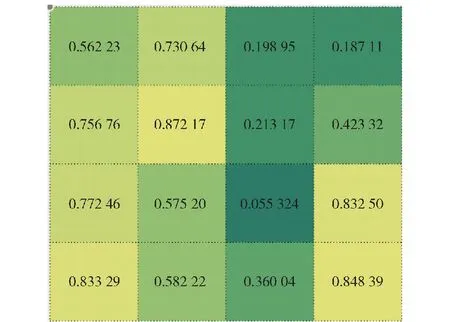
图4 SOM神经网络训练输出结果


根据确定的最终云化区间的转折阈值,确定装备各个状态等级的云化区间如表5所示。

表5 状态等级的云化区间
3.2.2 改进云模型的建立
由装备各个状态等级的云化区间,根据2En法及2.3节中的方法,确定各个状态等级评价云[33]的各参数如表6所示。
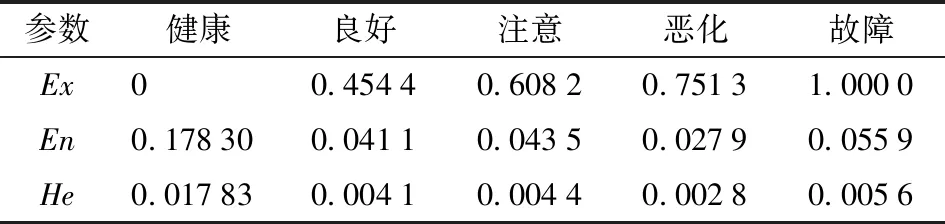
表6 各评价云的云模型参数
根据表6,利用PyCharm软件仿真基于改进云模型的状态评估模型结果如图5所示。

图5 状态评估模型仿真结果
3.2.3 云重心位置计算
利用本文之前所求的各个指标权重计算出某型坦克炮长瞄准镜系统的上反射镜碰框时力矩电机运行状况实测第4组数据的综合云重心位置xa=0.583 2,触发良好云与注意云。注意状态云的期望为0.608 2,根据式(22)可得状态属于注意状态的隶属度μ3=0.847,良好状态云的期望为0.454 4,属于注意状态的隶属度μ2<0.1。因此,此时上反射镜碰框时力矩电机运行状况的状态等级[34]为注意。
3.3 综合评估
根据3.2节所述状态等级评估等级过程,对某型坦克炮长瞄准镜系统的上反射镜碰框时力矩电机运行状况实测数据进行状态等级的综合评估,其各组数据的云重心如表7所示。
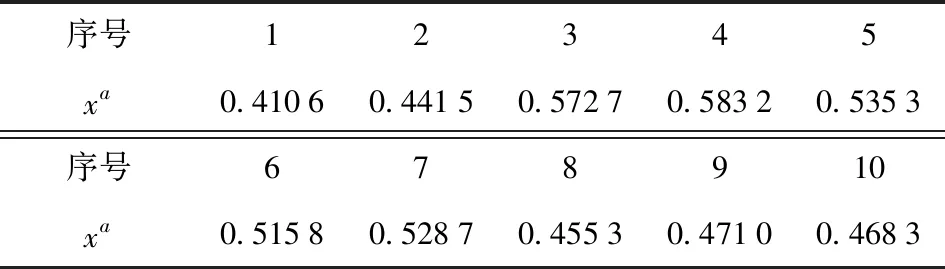
表7 云重心计算结果
根据表7计算出的云重心结果确定力矩电机运行状况的状态等级,其中e1~e5分别为健康、良好、注意、恶化以及故障等5个状态等级,如图6所示。

图6 上反射镜碰框时力矩电机运行状态趋势图
仿真结果显示,设备开始处于良好状态,从第3组数据开始时设备转为注意状态。经过对各个指标的评估发现其中多个指标出现了异常,其中,垂直控制力矩电机指标信号的现象尤为明显。经后续维修人员排查发现高低控制板发生故障,更换后设备状态转为良好。由此可得,本文的评估结果比较贴合实际,能够帮助维修人员在装备维修时提供一定的参考。
3.4 评估算法对比
选取另外10台同型号的坦克炮长瞄准镜系统上反射镜碰框时力矩电机测得10组运行状态数据,分别采用传统云模型以及其他以应用的如文献[16]的改进白化权函数的方法与本文提出的方法分别对10台力矩电机进行综合评估,具体评估结果如图7所示。
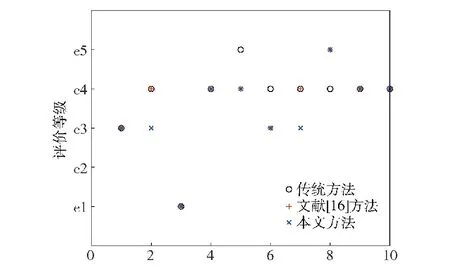
图7 评估对比结果
由图7可知,本文方法与传统云模型在2组、5组、6组、8组的评估结果发生了分歧。根据分析,评估结果不同的主要原因是传统云模型并没有考虑到相邻状态的关联性和模糊性。而文献[16]中的方法在2组、8组的评估结果发生了跳变,是因为该方法虽然考虑到了等级之间的关联性,但是忽略了其中的模糊性,导致了结果的偏差,从而验证了本文所建立的评估模型是合理并且科学有效的。
4 结论
本文针对某型坦克的炮长瞄准镜系统提出了一种健康状态评估的方法,并通过上反射镜碰框时力矩电机运行数据进行验证。得出以下主要结论:
1) 通过改进组合赋权法确定的各个指标的最终权重更加科学且合理。
2) 通过SOM神经网络对炮长瞄准镜运行数据进行聚类分析得到的装备各个状态等级的云化区间更加合理。
3) 根据各个状态等级的云化区间,基于2En法则生成的评价云模型能够较好地表示相邻的两个装备状态等级之间的连续性和模糊性。
本文提出的评估方法的评估结果科学并且客观,有助于为装备运行状态的检修提供指导,并为后续的装备健康管理提供了参照。
猜你喜欢
小哥白尼(军事科学)(2022年8期)2022-09-20 06:11:36
商周刊(2018年22期)2018-11-02 06:05:28
轻兵器(2017年24期)2017-12-29 21:22:27
电子测试(2017年11期)2017-12-15 08:57:23
中国计算机报(2017年10期)2017-04-06 16:54:14
制造业自动化(2017年2期)2017-03-20 14:26:18
光学精密工程(2016年6期)2016-11-07 09:08:02
装备制造技术(2016年7期)2016-09-26 09:21:36
制造技术与机床(2016年3期)2016-08-31 04:02:37
互联网天地(2016年2期)2016-05-04 04:03:24