
动态环境下移动机器人避障策略研究
2023-09-07 14:59:38邱萌萌徐林沈洋洋朱小峰
河南科技 2023年14期
邱萌萌 徐林 沈洋洋 朱小峰

摘 要:【目的】分析动态环境下移动机器人避障技术,从而实现有效的动态避障及新技术应用。【方法】以移动机器人为研究对象,对人工势场法、避障控制法、人工神经网络避障控制法、快速扩展随机树算法等避障策略进行分析,在此基础上对人工势场法避障策略进行改进。【结果】解决路径规划对象徘徊于局部极小值点的问题。当移动机器人抵达局部极小处时,在新势场作用下,会摆脱局部极小點束缚,能有效解决目标点不可达的问题。【结论】通过弥补人工势场法来解决路径规划过程中缺少全局信息的缺陷,使移动机器人在未知、动态、复杂的环境中行进,有针对性地增加数个虚拟目标点,在不过多增加计算量的前提下,能有效提高移动机器人在避障过程使用人工势场法的适用性。
关键词:机器人;动态环境;避障策略;探究
中图分类号:TP242 文献标志码:A 文章编号:1003-5168(2023)14-0021-04
DOI:10.19968/j.cnki.hnkj.1003-5168.2023.14.004
Research on Obstacle Avoidance Strategy of Mobile Robot in Dynamic Environment
QIU Mengmeng XU Lin SHEN Yangyang ZHU Xiaofeng
(Anhui Vocational College of Mechanical and Electrical Engineering,Wuhu 241000, China)
Abstract: [Purposes] This paper aims to analyze the obstacle avoidance technology of mobile robot in dynamic environment, so as to realize effective dynamic obstacle avoidance and new technology application. [Methods] Taking the mobile robot as the research object, the artificial potential field method, obstacle avoidance control method, artificial neural network obstacle avoidance control method and fast extended random tree algorithm and other strategies were analyzed, on this basis the obstacle avoidance strategy of artificial potential field method was improved. [Findings] The problem that the path planning object wanders around the local minimum point is solved. When the mobile robot reaches the local minimum, under the action of the new potential field, it will get rid of the constraint of the local minimum point, which can effectively solve the problem that the target point is not reachable. [Conclusions] By making up for the lack of global information in the path planning process by the artificial potential field method, the mobile robot can move in an unknown, dynamic and complex environment, and increase several virtual target points in a targeted manner. On the premise of not increasing the amount of calculation, it can effectively improve the applicability of the artificial potential field method used by the mobile robot in the obstacle avoidance process.
Keywords: robot; dynamic environment; obstacle avoidance strategy; explore
0 引言
机器人的开发应用能代替人类在生产、军事、科研等领域中从事危险工作,人类生活的人性化服务水平不断提高,使“上天揽月,龙宫探宝”等神话故事变成现实。从智能玩具、电子宠物、读书机、扫地机器人、AGV,到深海调查设备、炼钢炉内无伤探测器、军用民用无人机等,机器人能“看”到人眼无法识别到的物体,能进入无法保证人类生命安全的作业空间,能快速计算出大量数据的精确结果,能存储、复制、共享海量数据。总之,机器人能提升人类生活、学习和工作水平。在动态环境下,移动机器人避障策略是为移动机器人赋能的具体措施,使移动机器人能随机探测出障碍物目标, 并据此规划出有效规避的行动线路,或在给定的地图环境中自由行进。通过对移动机器人避障策略进行深入研究,有助于动态环境下移动机器人避障技术的创新和升级换代[1]。
1 动态环境下移动机器人避障策略
近年来,随着数字技术的发展,移动机器人在工业生产、科研及人们日常生活中的应用范围也越来越广。规避障碍、自由高效运行、提高人性化服务水平一直是移动机器人研究的内容和目标。动态环境下移动机器人避障策略方面的研究成果有很多,并有研究成果已经在实际中应用。目前,常见的动态环境下移动机器人避障策略研究方法归纳为7种,即人工势场法、避障控制法、快速扩展随机数算法、模糊逻辑控制避障控制法、人工神经网络避障控制法、栅格法避障控制法、声波避障控制法[2]。本研究对使用频率较高的4种策略方法进行探究。
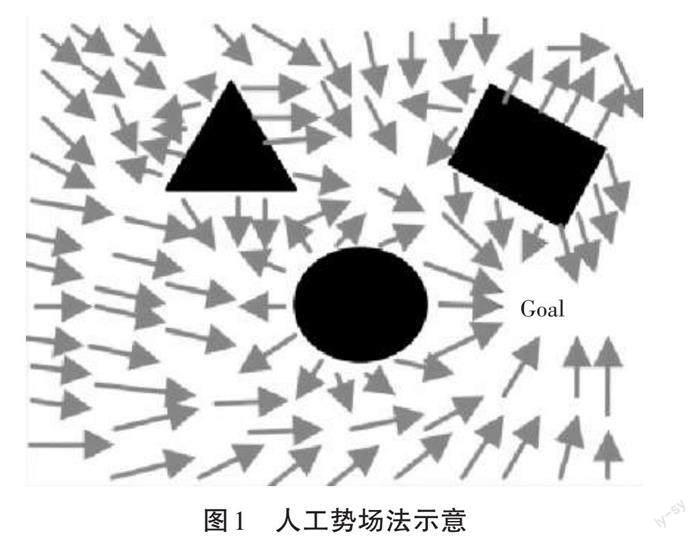
1.1 人工势场法
人工势场法用势场来定义移动机器人所处的环境,通过位置信息来控制机器人的避障行驶。该避障策略通过虚拟力场法对机器人移动路径进行规划,基本思路是把机器人的移动环境设计为一种抽象的、完美的人造引力场,如图1所示。把机器人当作一个运动的质点,在规划的人工势场内,所有需要到达的目标点能对移动机器人产生相应的“引力”,而障碍物对移动机器人产生相应的“斥力”,通过对引力、斥力的求合,能有效控制移动机器人运动,达到理想的避障效果。采用人工势场法对动态环境下移动机器人避障策略进行规划,规划出来的路径比较平滑且安全,局部亟须最优化。为此,多位学者开展了大量研究,期望以建立统一的势能函数来解决路径规划的局部最优化问题。这种设想的基本要求是障碍物具有规则性,应尽可能减少算法的计算量,才能解决障碍物不规则计算量大而无法计算的问题。在实际环境中,机器人与障碍物的距离不可能都很远,有的很近,甚至靠近所要到达的目标,在这样的环境中,移动机器人将永远规避障碍,无法到达目的地[3]。
1.2 避障控制法
在已有的动态环境下移动机器人避障策略研究中,避障控制法属较早的研究成果,且应用广泛,适用于多类型机器人工具装置。避障能力是机器人自动化、智能化的核心功能,需要完善其自主避障系统。避障控制法利用传感、北斗卫星定位及地球物理探测技术装置,对机器人避障能力进行控制,确保机器人在遇到障碍物时能自动精准识别,从而实现有效规避。机器人避障控制策略分为4个阶段,即感知障碍物、绕过障碍物、路径搜索和场景建模。4个阶段相互衔接、共同作用,从而使机器人避障技术能有效发挥作用[4]。机器人在发现障碍物后,会自动绕开障碍物,并自我规划到达目的地路径。
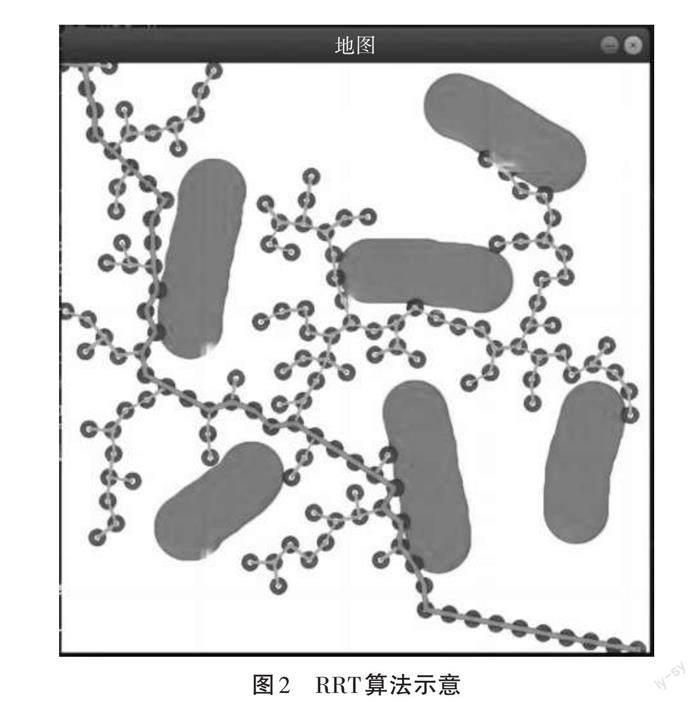
1.3 快速扩展随机树算法
快速扩展随机树算法(RRT)是动态环境下移动机器人避障策略研究较为先进的成果。该算法通过与随机路径规划理论相结合,把移动机器人起始点设定为根节点,以在自由可行空间内生长出一棵扩展随机树的方式来选定一条避障路径,算法示意如图2所示。从左上角出发,呈树形向目标点延伸,即从一个起始构型出发,不断延伸树形数据,最终与目标节点相连。在随机树生长过程中,随机选取最新节点,以此类推,直到目标节点。该算法分两个阶段[1],即构建扩展随机树、路径查询。构建扩展随机树完成后,要停止添加新节点[5]。
1.4 人工神经网络避障控制法
近年来,在动态环境下移动机器人避障策略研究方面,因人工势场法存在陷阱区域,栅格法实施过程的空间分辨率与实时性要求、内存量、时间复杂度之间存在矛盾。因此,这两种方法均存在缺陷。人工神经网络避障控制法是以机器人和障碍物之间的相对运动为研究依据,在未知或部分未知的环境及信息不确定时,机器人实现避障更为困难,通过简化机器人避障步骤,使机器人能灵活对障碍物进行精准判断,在确定障碍物确实存在时,才能选择有效合适的避障方式来躲避路障,并快速跟踪规划路径,如图3所示。
基于人工神经网络避障控制法的动态环境下移动机器人避障策略分为4个阶段[6]。一是避障行为规划。机器人以其所在位置为圆心来设置运动安全距离扇形图,连接障碍物的历史点和当前点,延长连线,从而使其与扇形边沿相交,交点在边沿弧线上,标志着距离安全,不用躲避。在扇形区域内,要发挥超声波测距传感器、红外/激光TOF传感器、双目视觉传感器的技术优势,对安全距离进行判断,从而规划出规避措施。二是从扇形区域到屏幕坐标的映射。人工网络技术有很多优点,如自学习和自组织功能、并行处理和分布式存储结构、很强的鲁棒性和容错性机制等。用人工神经网络技术来标定相对误差半径和相对坐标,从而实现非线性逼近,尤其是误差反转算法和前溃型神经网络模型的应用,能精确测算出拟合误差在屏幕中心点的位置,拟合误差值越大,证明运动取向越安全。三是控制避障过程的运动。规避障碍物碰撞风险的方法有多种。通过改变机器人运动行为来控制避障过程的运动,从而实现对障碍物的有效规避。机器人从出发点到目的地的路径规划一般划分为4個区域,即自由规划区、减速区、加速区、停止运行区,这4个区域只是针对机器人实施避障过程而设计的不同运动环境区域,在实际运动过程是不可能绝对分开的,其或重叠、或交叉、或分开、或相接;四是基于任务的动态环境下仿真效果。机器人在运动过程中,障碍物的出现存在着不确定性,可能会与机器人直线运动轨迹或曲线运动轨迹相交而产生碰撞。机器人要实现对不确定性障碍物的规避,就要模拟真实的运动环境,根据模拟环境的仿真效果,对规避障碍物的方式进行选择,使机器人模拟路径在没有最优的条件下,也能完成规避障碍的具体行为,路径规划如图4所示。目前,在规划避免碰撞的快速性、准确性、进退自如性上还有很大的改善空间,还要进一步完善机器人避障策略措施。
2 动态环境下移动机器人避障策略优化
2.1 人工势场法避障策略的优化改进
针对动态环境下移动机器人采用人工势场法规避障碍技术存在的缺陷,有相关人员展开深入研究,并进行了大量试验,获得很多优秀成果,并得到学术界和工程界的广泛认可。其中,余滕伟等[1]对动态环境下移动机器人避障策略优化措施研究成果的影响较大。当障碍物与目标非常靠近时,其对移动机器人产生的斥力与规划行进目标点对机器人产生吸引力大小相等、方向相反。当二者的合力趋近于0时,尽管是机器人在行进过程中的局部或极小值区域,但移动机器人深陷其中,无法脱离,难以准时到达规划路径的目的地,导致机器人行进路径规划失败。当移动机器人处于复杂障碍物中,如O形障碍物,移动机器人几乎逃脱不了障碍物的环绕。有学者在已有研究成果基础上,如“函数减少局部极小值点”“添加启发式搜索算法”等,结合相关理论和试验数据,提出在路径起点到目标点之间增加临时目标点的方法,用来解决局部极小值点的问题。当移动机器人抵达局部极小值区域时,在新势场作用下,会摆脱局部极小点的束缚,解决目标点不可达的问题[7]。局部极小点情况如图5所示。
因此,可通过弥补人工势场法来解决路径规划过程中缺少全局信息的缺陷。当移动机器人行进到未知、动态、复杂的环境时,RRT算法通过增加若干虚拟目标点,在不增加计算量的前提下,能提高移动机器人在避障过程APF的适用性。
2.2 其他动态机器人避障策略改进
随着信息技术的集成及生物技术、人工智能、元宇宙等相关技术的开发应用,动态机器人的避障策略也在逐渐完善,如基于神经网络的移动机器人避障控制是在人工势场、避障控制法的基础上,简化动态机器人避障步骤。在不考虑障碍物动态、快速反应的基础上,结合非视觉传感器避障,能有效弥补动态机器人避障行为中障碍物目标识别速度不高、不精准的缺陷。快速扩展随机树的改进与不断生长且向四周发散的树类似,移动机器人在自由空间中确定规划路径的起始根节点和随机选取节点,作为判断起始根节点不在障碍物内的随机选取节点,确定机器人能有效避障的空间条件和环境状况[8]。
3 结语
在动态环境下,移动机器人避障策略的研究仍处于起步阶段,很多研究成果在实际工程应用中仍存在缺陷,特别是在动态障碍物地图中,动态机器人单一路径规划算法很难使机器人在复杂环境中顺利完成规避。因此,需要继续不断研究探讨。
参考文献:
[1]余腾伟,刘昌力.动态环境下的移动机器人避障策略研究[J].重庆交通大学学报(自然科学版),2021(9):131-136.
[2]陈冠星.动态环境下多机器人编队及避障控制策略研究[D].南京:南京理工大学,2021.
[3]陈志明.移动机器人在复杂环境下的动态避障[D].哈尔滨:哈尔滨工业大学,2020.
[4]尹鹏衡.动态环境下移動机器人路径规划与避障算法研究[D].秦皇岛:燕山大学,2020.
[5]王仲民,刘开绪.动态环境下移动机器人路径跟踪与避障[J].控制工程,2010(3):397-400.
[6]李二超,王玉华.改进人工势场法的移动机器人避障轨迹研究[J].计算机工程与应用,2022(6):296-304.
[7]孙波,姜平,周根荣,等.基于改进遗传算法的AGV路径规划[J].计算机工程与设计,2020(2):550-556.
[8]陈天德,黄炎焱,王振华.基于碰撞预测的无碰撞航路规划[J].系统工程理论与实践,2020(4):1057-1068.
猜你喜欢
中学生数理化·七年级数学人教版(2022年5期)2022-06-05 07:51:48
中等数学(2021年11期)2021-02-12 05:11:46
今日农业(2019年14期)2019-09-18 01:21:42
金桥(2019年10期)2019-08-13 07:15:16
快乐语文(2018年13期)2018-06-11 01:18:16
中等数学(2018年11期)2018-02-16 07:47:42
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:54:51
