
基于群体合作演化的高速列车编队运行多目标优化
2023-09-05 14:07上官伟敦旖晨蔡伯根刘俊囡宋鸿宇
铁道学报 2023年8期
上官伟,敦旖晨,蔡伯根,刘俊囡,宋鸿宇
(1.北京交通大学 电子信息工程学院,北京 100044;2.北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044;3.北京市电磁兼容与卫星导航工程技术研究中心,北京 100044;4.北京全路通信信号研究设计院集团有限公司,北京 100070)
我国高速铁路发展日新月异,“十四五”规划纲要草案提出构建快速网,基本贯通“八纵八横”高速铁路。但是,我国当前铁路总体运输效率依然无法满足国家经济社会大发展的要求,以京沪线为例,运能已接近饱和[1],春运、“小长假”等时期铁路客流激增,使运能阶段性紧张问题凸显。因此,研究能够提升铁路线路时空利用率[2]、节约列车运行能耗的多目标优化方法具有重要意义。
随着我国列车运行控制技术的发展,高速铁路列车追踪间隔不断缩小,相邻列车之间的相互影响更加明显,线路任意列车发生晚点极有可能产生延误传播,耽误乘客行程,甚至导致车站大量旅客滞留,降低乘客对高速铁路出行方式的满意度。而使用人工方式调整列车运行,对调度人员的技术和经验要求较高,且调整效率低、调整结果随机性大;并且由于计算效率等原因,传统的集中式控制方法不便于在今后大规模铁路网络化运营中使用。因此,考虑在列车操纵层面研究使用列车运行控制优化方法解决列车延误传播问题[3-4],开展列车群体合作运行控制优化研究有重要意义。
围绕群体合作理论与应用,国内外学者已展开研究,Bayindir等[5]总结群体机器人领域自主式机器人群体应用分布式方法合作完任务的过程和方法;Gao等[6]基于态势感知一致性及其信息处理机制研究无人机群体分布式合作方法;Yu等[7]提出一种用于解决集中控制失效时无人集群自主协作问题的公共物品博弈框架下的合作演化机制。在群体合作相关研究中发现,编队是一种组织群体运行的有效模式,编队控制指一定数量的个体在满足外部环境约束条件前提下,以确定的队形向目的地运动[8],李樾等[9]基于快速扩展随机树算法提出一种复杂环境下快速实现多无人机编队重构的方法;魏蓝等[10]基于反作用控制系统的姿轨控制技术构建多弹协同编队策略;张天勇等[11]提出网络化多智能体在通信延时情形下的主从式预测编队控制架构,应用编队模式组织的群体执行复杂任务可体现出比个体更优的性能。
在日益复杂和繁忙的铁路网络化运营背景下,列车运行控制对象由单列车向列车群体转换,在群体合作应用方面,Wang等[12]基于混合整数线性规划方法实时规划多列车协同追踪运行过程;Gao等[13]提出在线估计未知系统参数的列车群协同自适应控制机制;Liu等[14]研究针对虚拟重联列车群集的智能调度控制方法,提升了车站发车效率;Petrillo等[15]提出用于列车间通信的分布式自适应协同控制策略实现列车同步。鲁工圆等[16]以最短区间运行时分为目标,提出列车运行时空轨迹优化模型,实现追踪间隔时间压缩;针对列车群体编队运行,Li等[17]利用势场和拉萨尔不变性原理建立高速列车编队协同巡航控制模型;Flammini等[18]基于ATC系统使用虚拟重联技术实现多列车虚拟连接。相比传统方式,基于群体合作的列车运行控制优化在计算效率、实时性和优化效能等方面更为优越。
针对列车运行优化,随着智能控制理论迅速发展,智能算法广泛应用于列车运行优化求解,Oshima等[19]首先采用预测模糊控制方法验证列车自动控制系统对列车运行的有效控制。蔡伯根等[20]基于差分进化算法求解列车多目标优化运行速度轨迹。针对列车群体运行优化,严细辉等[21-23]提出基于状态预测的高速列车运行控制策略在线滚动规划算法与分布式协同追踪运行算法,对多列车速度控制求解。张翕然等[24]结合量子粒子群算法和改进的Floyd算法等求解列车运行协同调整优化模型,使乘客等待时间最小化。Richard等[25]使用分支定价算法求解运输中断时列车时刻表的优化重排。Zhang等[26]基于多种群并行多智能体协同差分进化算法进行列车群节能运行在线调整。Huang等[27]使用遗传算法、粒子群算法求解列车多区间运行轨迹优化与多车时刻表优化问题。智能优化方法的应用实现了列车运行多目标优化问题的高效求解。
综上所述,本文以编队方式组织高速列车群体运行,研究列车群体合作优化运行过程的演化机制。针对列车群体区间追踪运行多目标优化及延误场景下运行调整,结合高速列车群体运行模型构建与编队追踪速度合作演化控制,基于群体智能算法求解列车运行多目标优化与延误场景下列车调整优化问题,以提高线路运输能力,减少列车运行碳排放,消解列车较小延误及其传播影响。
1 高速列车追踪运行与优化群体模型构建
1.1 高速列车群体合作演化分析
系统中个体通过个体间、个体与环境的相互作用改变自身行为,使群体行为随时间与空间演化,涌现出稳定的群体合作行为。在自然界和人类社会等众多领域,合作行为的出现相对于个体都体现出一定的优势。通过分析个体行动策略与个体间相互影响关系,研究群体合作行为的产生现象与产生机理,即研究群体行为的演化,从而制定相应的演化策略促进群体行为的合作涌现,优化系统运行过程与输出结果,具有重要的研究意义。通过群体交互结构设计与博弈范式设置,构建合作演化机制,选择遵循亲缘选择、直接互惠、间接互惠、网络互惠或群体选择等机制[28],从而衍生制定出一定的演化规则,以促进合作的涌现,优化系统性能。
高速列车群体的协同运行呈现明显的群体合作行为特征,应用群体合作研究高速列车分布式运行控制与小间隔运行下的延误调整,提出高速列车群体协同运行控制与调整合作演化策略,能够有效解决列车群体运行控制多目标优化问题。以编队模式组织同一线路运行的部分高速列车成为群体,利用可靠的车车通信技术构建高速列车合作演化静态网络群体交互结构,列车与其相邻前后列车实现实时可信车车通信,共享速度、位置等信息;以列车“牵引、巡航、制动、惰行”四种运行工况构成高速列车运行合作演化博弈范式策略空间;列车根据群体运行状态与运行环境自主控制自身运行状态建立演化规则,针对编队列车追踪运行过程,建立基于策略模仿机制的更新策略规则,评估追踪列车模仿被追踪列车的运行状态的安全、高效等收益,更新追踪列车运行状态,基于列车群体合作完成运输任务,实现列车更加高效节能运行。
1.2 列车群体编队追踪运行控制
根据列车运行特性选取同一车站连续发出的部分列车组成若干列车编队,一列前行列车和多列追踪列车组成一个编队。各列车的虚拟参考列车组成虚拟层,与实际列车运行对照。
为满足移动闭塞下高速列车安全、高效运行需求,基于弹簧-阻尼器机械动力系统构建列车编队模型,控制高速列车群体合作运行,列车作用力可表示为
( 1 )

列车编队间追踪运行采取绝对距离制动模式,相邻列车最小安全追踪距离Lsafe为
Lsafe=Ltrain+Lbrake+Lreact+ΔL+d1+d2
( 2 )
式中:Ltrain为列车长度;Lbrake为列车当前运行速度所对应常用制动距离;Lreact为司机反应时间内列车运行距离;ΔL为附加安全距离;d1和d2为相邻列车安全包络距离。
采取绝对距离制动模式追踪运行的列车,相邻列车最小发车时间间隔Hmin为
( 3 )
xH=x+Lsafe
式中:xH为列车与相邻前车以最小安全间隔距离追踪运行时,相邻前车当前位置;x为列车当前位置。
相邻编队前行列车发车时间间隔Theadway与编队列车数量N有关
Theadway=N·Hmin
s.t.L(t)=Lreal(t)-Lsafe(t)≥0
( 4 )
式中:Lreal为相邻列车实际追踪距离。
编队列车追踪运行过程见图1,首先考虑区间限速条件和区间运行时间约束,以节能、舒适为优化目标,优化前行列车区间运行速度轨迹。然后,追踪列车根据实时获取的相邻前车速度、位置信息,结合自身当前运行速度、位置,计算列车编队弹簧-阻尼器机械动力系统对追踪列车的作用力,计算列车追踪指导因子,基于建立的合作演化规则,控制追踪列车运行,形成追踪列车运行控制策略,使列车以更小的间隔安全追踪,提高铁路线路运输能力。
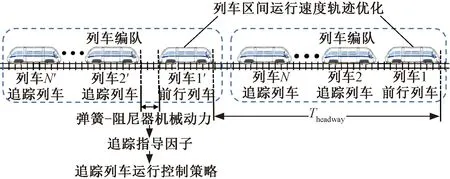
图1 编队列车追踪运行过程
受到多种因素干扰时,会设置线路临时限速,这将导致列车运行延误。为消解较小延误,缓解延误传播,进行编队列车延误运行调整,见图2。实时监测编队列车运行过程中,对比列车计划运行状态,当列车实际运行发生延误时,以延误最小化为首要目标,调整优化延误列车剩余区间运行轨迹,在保障列车安全运行间隔的基础上,调整延误列车同一编队内的后续列车追踪过程;若编队内列车运行调整难以满足完全消解列车运行延误,并对后续编队的列车安全运行造成威胁,则进行编队间列车延误调整,控制后续编队内的列车加入延误列车所在编队,利用编队间列车冗余运行间隔缓解列车运行延误。
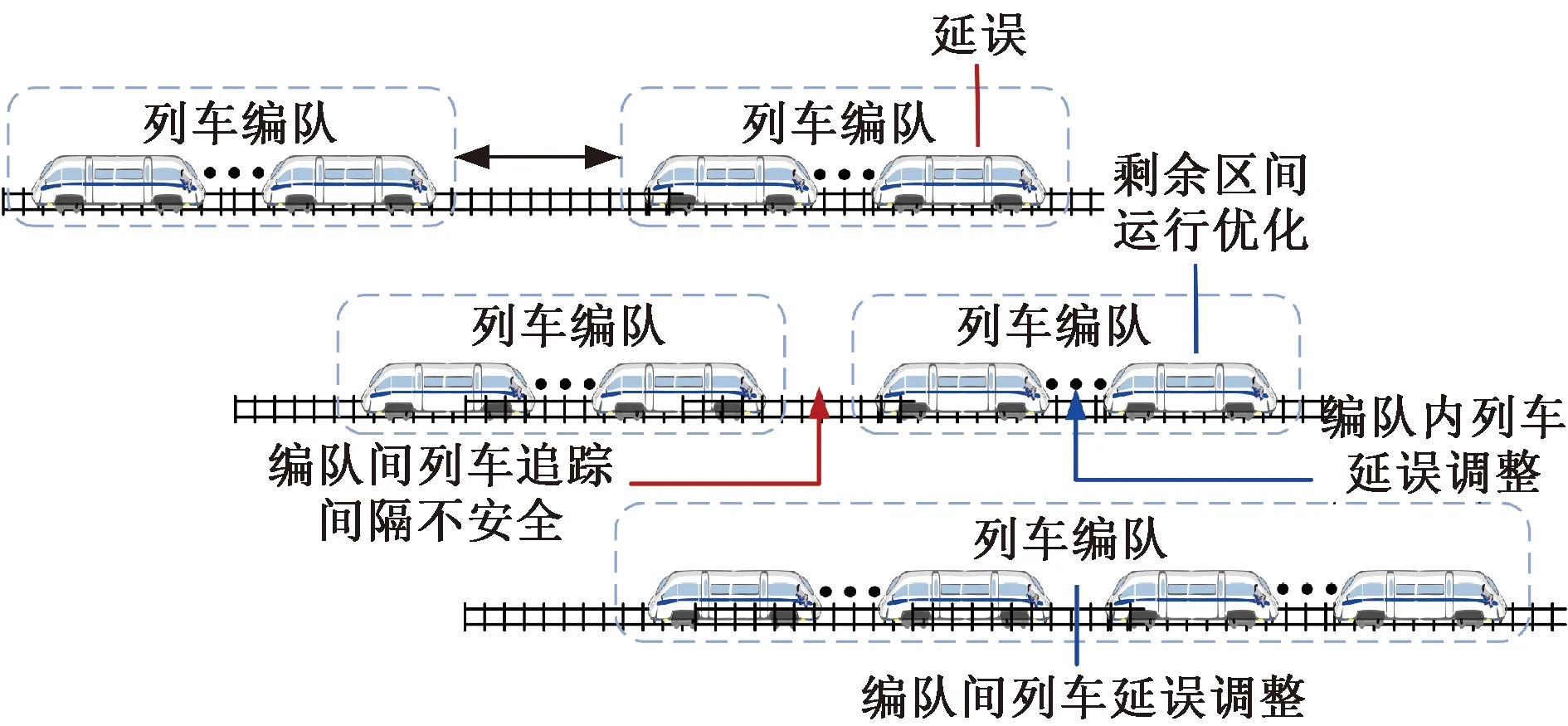
图2 编队列车延误调整
1.3 列车群体运行多目标优化模型
针对列车运行安全约束下高效、节能、舒适多目标优化问题,分析运行过程,建立列车群体运行能耗、效率、乘客舒适度及准点指标模型。
采用单质点模型表示列车动态特性,即
( 5 )
式中:M为列车质量;t为列车运行的时刻;γ为列车回转质量系数;v(t)为t时刻列车运行速度;x(t)为t时刻列车位置;uf和ub分别为列车的牵引和制动系数;Ft(v)和Fb(v)分别为列车以速度v运行时的牵引力和制动力;R(v,x)为列车在位置x以速度v运行时的运行阻力。
由列车发车时间间隔与列车群体运行时间总和建立线路运行效率函数模型JU为
( 6 )
式中:Ti_act为列车i在区间实际运行时间;Ti_dep为列车i与列车i-1发车时间间隔;n为编队列车总数。
以牵引力与制动力与走行距离乘积计算列车克服运行阻力所消耗能量,表示列车运行能耗
( 7 )
式中:JE,i为列车i的运行能耗函数;j为时间步长序列;JE为列车群体运行能耗函数;Ft,i(v)和Fb,i(v)分别为列车i以速度v运行时的牵引力和制动力;Δx为牵引/制动走行距离。
采用高斯评价模型评价舒适度
( 8 )
式中:Ci为列车i的乘客舒适度函数;Δt为时间步长;ai(t)为列车i在t时刻运行加速度;αi为列车i的加速度变化率;σ和c分别为高斯评价模型宽度系数与中心位置,分别取0.8和0。
Ti_act与时刻表中规定的列车运行时间Ti_sch评价列车准点率Pui为
( 9 )
构建列车群体合作演化追踪运行控制安全和工况转换约束函数。保证Lreal始终大于Lsafe;区间运行时,当前运行速度不超过限速;到站停站时,在指定位置停车。安全约束函数为
(10)
式中:vi_t和vlim_t分别为列车i在t时刻的运行速度和允许最大运行速度;xi和xi-1分别为列车i和i-1在t时刻的实际位置;Δxi为列车i的停车误差;Xa,i和Xb,i分别为列车i的实际和计划停车位置。
追踪列车依据Lreal实时变化转换自身运行工况,牵引、巡航工况不能与制动工况直接转换。
2 编队列车追踪速度控制与运行调整合作演化策略
针对编队列车追踪运行,引入追踪指导因子监测列车追踪运行状态,制定列车追踪速度控制合作演化策略,通过列车群体合作减小列车运行间隔,提高铁路线路运输能力。考虑因线路临时限速导致列车运行延误,并干扰后续列车运行问题,提出针对延误场景建立编队列车运行调整策略,消解较小延误,缓解延误在列车群体传播。
2.1 编队列车追踪速度控制合作演化策略
建立策略模仿机制使编队追踪列车随前车实时运行状态自主控制下一时刻运行工况转换,完成编队列车追踪速度合作演化控制,保持列车群体以编队形式稳定协同运行。
编队前行列车以离线优化速度轨迹运行,编队追踪列车i在前车i-1出发规定发车时间间隔后发车,列车i获取当前自身运行状态信息与编队列车i-1实时位置、速度信息。
基于弹簧-阻尼器机械动力模型,设置在途追踪行为调整指导因子P,判断追踪列车下一时刻转换各类运行工况是否符合安全约束,并评估运行效率收益,建立合作演化策略更新规则,指导其调整自身运行状态
(11)
式中:fc、Fvc和gc分别为编队内部列车追踪模型对应的弹簧-阻尼系统力、弹簧弹力和阻尼力;s和s0分别为弹簧实际长度和松弛长度,对应列车追踪距离为Lreal和Lsafe;vi和vi-1分别为列车i和i-1的运行速度;Kc、Cc分别为
(12)
(13)
其中,sgn为符号函数。
设置P的临界值为P1和P2,引入追踪间隔距离量Lmid和Lmax作为缓冲区间,避免列车运行能耗、时间、乘客舒适度产生很大波动。当Lreal不小于Lmax时,表示与Lsafe对比,列车存在较大的冗余追踪距离;当Lreal小于Lmid时,表示与Lsafe对比,列车存在较小的冗余追踪距离;当Lreal小于Lmax,且不小于Lmid时,表示与Lsafe对比,列车追踪距离适中,则
(14)

2.2 延误场景下编队列车运行调整策略
引入列车延误参考因子R,表征实际列车运行状态与虚拟层列车计划运行状态偏离程度
R={R1,R2,…,Ri}
(15)
式中:Ri为列车i时刻t延误参考因子;xi_act(t)为列车i时刻t实际运行位置;xi_sch(t)为列车i时刻t计划运行位置;Δxr为可容许列车距离偏差值。
列车编队运行,实时计算R,若R<-1,则调整编队列车运行。判断延误列车状态与在编队中的位置,延误列车i运行前方所有列车以原方式运行,以列车i为编队前行列车与同一编队剩余列车重新组成新的编队,重新规划列车i剩余区间运行速度轨迹,充分利用列车在区间运行的最大允许速度,在保障运行安全基础上,调整列车区间运行时间,以准点运行为首要目标,求解列车节能运行速度轨迹,按照2.1节策略控制编队内其他列车区间运行过程。
若延误列车所在编队内部无法完成列车延误消解,即延误列车所在编队后续编队前行列车无法以既定运行速度轨迹实现编队间安全追踪,则后续编队前行列车加入延误列车编队,以2.1节策略控制其追踪延误列车编队尾车运行,比较编队列车虚拟层运行计划,至不再有列车延误,结束运行调整。
3 编队列车群体多目标优化控制方法
针对以编队方式追踪运行的列车群体,应用群体智能算法,研究在安全约束下,列车群体运行高效、节能、舒适多目标优化控制方法,使用人群搜索算法(Seeker Optimization Algorithm,SOA)高效求解编队列车群体控制多目标优化问题,提高列车运行效率,降低列车运行能耗,确保乘客舒适度;若列车运行延误,使用改进布谷鸟搜索(Improved Cuckoo Search,ICS)算法对延误列车剩余区间运行速度曲线进行多目标调整优化,基于SOA优化求解的编队列车运行过程,合作调整后续列车运行速度。
3.1 基于SOA的编队列车群体控制优化
编队列车群体控制优化求解模型为
(16)
式中:ai,j和ai,j-1分别为列车i在j和j-1时刻的加速度。
安全约束符合式(10)与以下约束条件
(17)
式中:Tdiff为优化后列车区间运行时间与计划运行时间的偏差;T为优化后列车区间运行时间;Xsch为列车计划运行到达的位置,宿主鸟巢初始发现概率。
若编队数目n≥3,为简化求解过程,使追踪列车区间运行时间尽量接近时刻表给定运行时间以提升运输能力。引入罚函数法及权重因子,将此优化问题转变为无约束单目标优化问题
(18)
式中:E0和Ei为优化前后列车i运行能耗;Ti为优化后列车i区间运行时间;α和β分别为列车运行能耗、时间权重因子。
满足式(10)、式(17)安全约束条件,符合式( 8 ) 舒适度国际评价标准要求,即Ci>0.8。
编队列车群体控制优化既要实现每列车高效、节能、舒适运行,又要使列车运行满足安全、准点约束,使用智能优化算法求解时,决策标量多,计算量大,求解过程复杂,求解时间可能过长。粒子群算法是求解列车控制优化问题采用较多的算法,使用粒子群算法求解编队列车群体控制优化问题,见图3,在迭代27次时适应度函数收敛至最优适应度值,最优适应度值约为198.6,迭代30次求解时间约为4 190 s,求解时间过长。SOA是一种群体智能算法,智能群体每一个搜寻者倾向于向自己历史最佳位置、领域最佳位置和领域历史最佳位置移动,根据过去的行为和环境反馈指导下一步搜索方向,由于SOA搜索过程的方向性,能够有效缩短搜索时间,提高求解效率。使用SOA求解编队列车群体控制优化问题的适应度函数收敛性见图3,SOA收敛速度快,在迭代9次时适应度函数即收敛至最优适应度值198.6,迭代15次求解时间约为1 223 s。 对比粒子群算法,SOA收敛速度快,求解时间短,因此,选择使用SOA算法求解编队列车群体控制多目标优化问题。
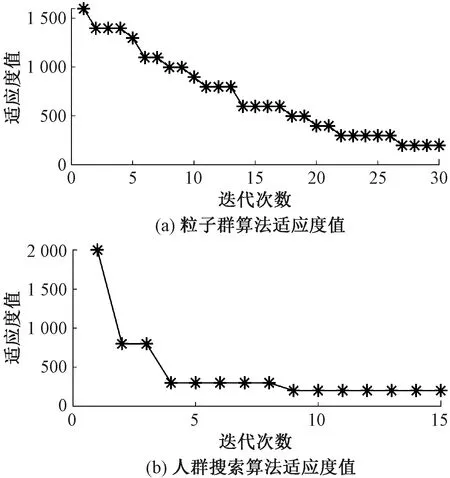
图3 适应度函数收敛性
编队列车发车时间间隔、区间运行时间和运行能耗之间会相互影响制约。基于SOA求解编队列车群体控制优化问题,具体流程见图4,优化编队列车发车时间间隔,从而提高铁路线路运输能力;追踪列车基于追踪速度控制群体决策,实时调整自身运行工况,实现编队列车运行控制高效、节能、舒适多目标优化。
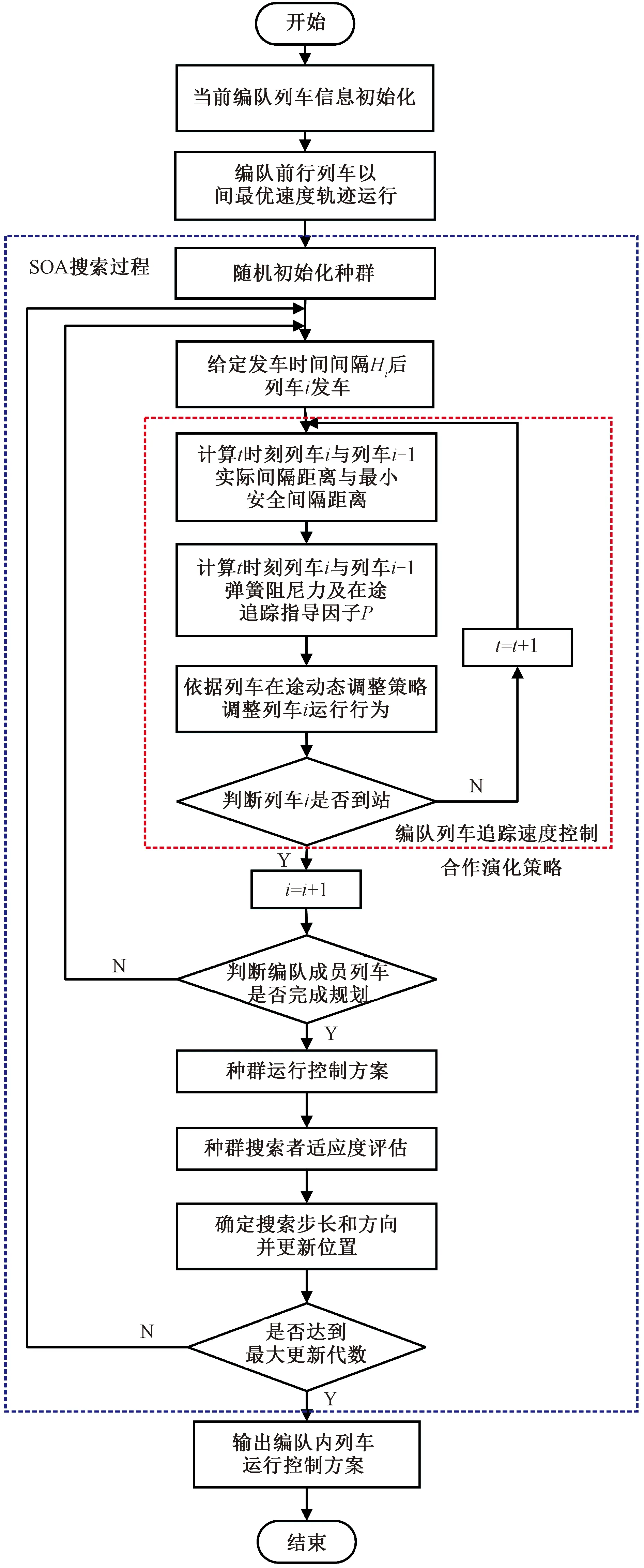
图4 基于SOA的编队列车群体控制优化流程
3.2 基于ICS的编队列车群体合作调整优化
建立延误场景下编队列车运行调整优化模型。
(1)总延误列车数目最小
编队列车群总延误列车数目Gd_num为
(19)
(20)
(2)列车区间延误时间最小
列车延误,若经重新规划仍无法恢复正点,优化目标变为列车区间运行时间Gd_t最短为
Gd_t=min(Ti-Ti_sch)
(21)
(3)列车运行能耗最小
当延误列车通过运行调整恢复正点运行时,考虑使列车运行能耗Gd_E最小为

(22)
对比编队列车群体控制优化问题,延误场景下的列车运行调整时,在线优化求解延误列车剩余区间运行速度轨迹维度较低,但是对求解效率提出了更高的要求,因此,考虑利用更为简单高效的算法进行在线优化求解。差分进化算法[20]用于求解列车运行速度轨迹离线优化问题,获得离线最优运行控制策略曲线,在满足时刻表约束条件下,能够有效降低列车运行能耗。布谷鸟搜索算法核心策略是布谷鸟繁殖行为和生物群觅食路径Levy飞行,其全局搜索能力强,算法流程简单,运算效率高,可能更适用于列车运行速度轨迹在线优化求解。对比差分进化算法与布谷鸟算法,分析优化求解列车区间运行速度轨迹时两种算法的适应度函数收敛性,见图5。布谷鸟搜索算法收敛较快,且迭代30次,布谷鸟搜索算法用时2.67 s,差分进化算法用时8.52 s。因此,认为布谷鸟搜索算法求解效率更高,更适用于在线优化求解延误列车剩余区间运行速度轨迹。
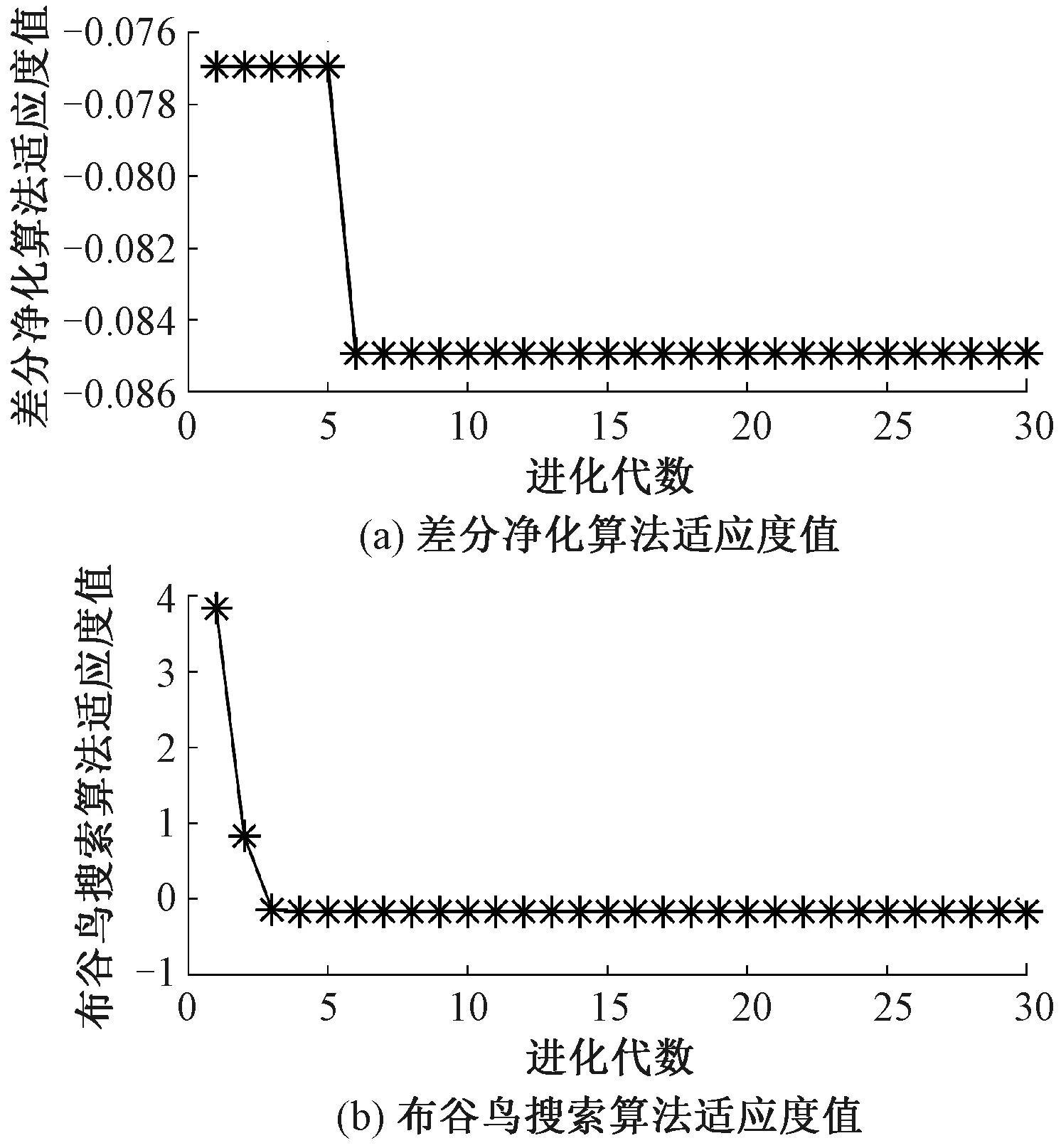
图5 适应度函数收敛性
布谷鸟搜索算法中,宿主鸟巢是否被替换取决于发现概率与随机参数的大小,引入自适应发现概率,根据个体适应度产生对应发现概率Pi,计算式为
(23)
式中:fi为第i个个体鸟巢适应度值;fworst和fbest分别为个体鸟巢最差和最优适应度值;Pa为计算自适应发现概率时,宿主鸟巢初始发现概率。
步长参数决定Levy飞行在局部搜索和全局搜索的比例侧重。根据搜索前后期对搜索能力的要求,设置自适应步长γ的计算式为
(24)
式中:γ0为初始搜索步长;γrange为步长的变化范围;G和Gm分别为当前和最大迭代次数。
ICS算法具体步骤为:
Step1初始化算法参数及种群鸟巢个数,设置种群规模、最大进化代数、步长相关参数和种群个体鸟巢最大发现概率,并随机产生初始种群。
Step2计算种群个体鸟巢适应度值。
Step3根据式(24)计算宿主鸟巢自适应步长,更新宿主鸟巢位置。
Step4计算新种群个体鸟巢适应度值,采用贪婪策略,比较父代和子代宿主鸟巢,保留优秀个体鸟巢进入下一代繁殖。
Step5根据式(23)计算宿主鸟巢发现概率,随机替换迁移种群个体。
Step6判断是否满足终止条件,若未达到最大迭代次数,转Step2,否则,输出最优解,结束。
以总延误列车数目和延误时间最小为调整目标,优化列车运行能耗,基于ICS算法求解剩余区间延误列车巡航和制动初速度,列车先前运行数据和线路数据已知,可获得剩余区间列车运行速度轨迹;基于SOA优化求解的编队列车运行过程,重新规划后续列车追踪运行轨迹,实现延误场景下编队列车群体合作调整优化。
4 仿真验证
以赤壁北—长沙南区间G445次列车实际运行数据为依据进行仿真验证。对高速列车编队运行多目标优化进行算例模拟验证与分析。列车区间运行信息和主要参数如表1、表2所示。

表1 列车在赤壁北—长沙南区间运行信息
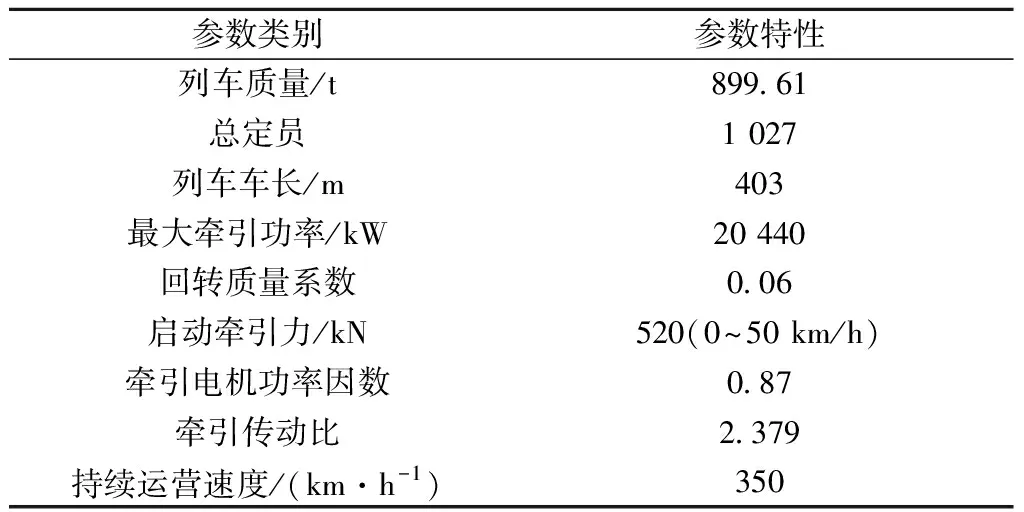
表2 CRH380AL型列车主要参数
4.1 编队列车群体运行多目标优化
设置5列高速列车以G445次列车运行时间在赤壁北—长沙南区间编队运行,离线优化求解编队前行列车运行速度轨迹,4列追踪列车以2.1节策略追踪运行。
4.1.1 编队前行列车运行轨迹多目标优化
基于差分进化算法优化编队前行列车运行速度轨迹,由“最大牵引—巡航—惰行—最大制动”四阶段组成,以巡航速度和制动初速度为决策变量,引入安全和时间约束条件,考虑节能、舒适优化目标,基于罚函数法转换为无约束优化问题,构建多目标优化模型
(25)
式中:σ为列车运行晚点惩罚因子。
求解前行列车最优运行轨迹,结果如表3所示,运行轨迹见图6,优化后满足限速和时刻表约束,运行能耗降低8.49%,舒适度参数始终大于0.8,满足舒适度要求。
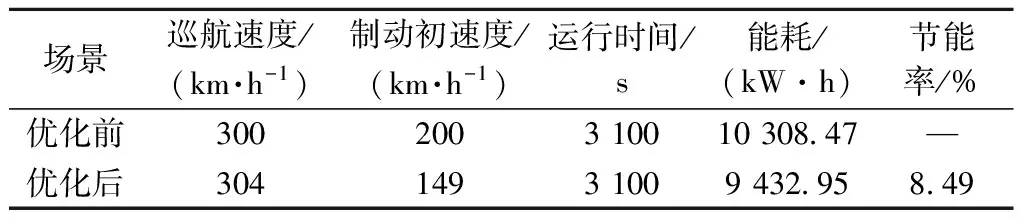
表3 单列车最优运行轨迹结果
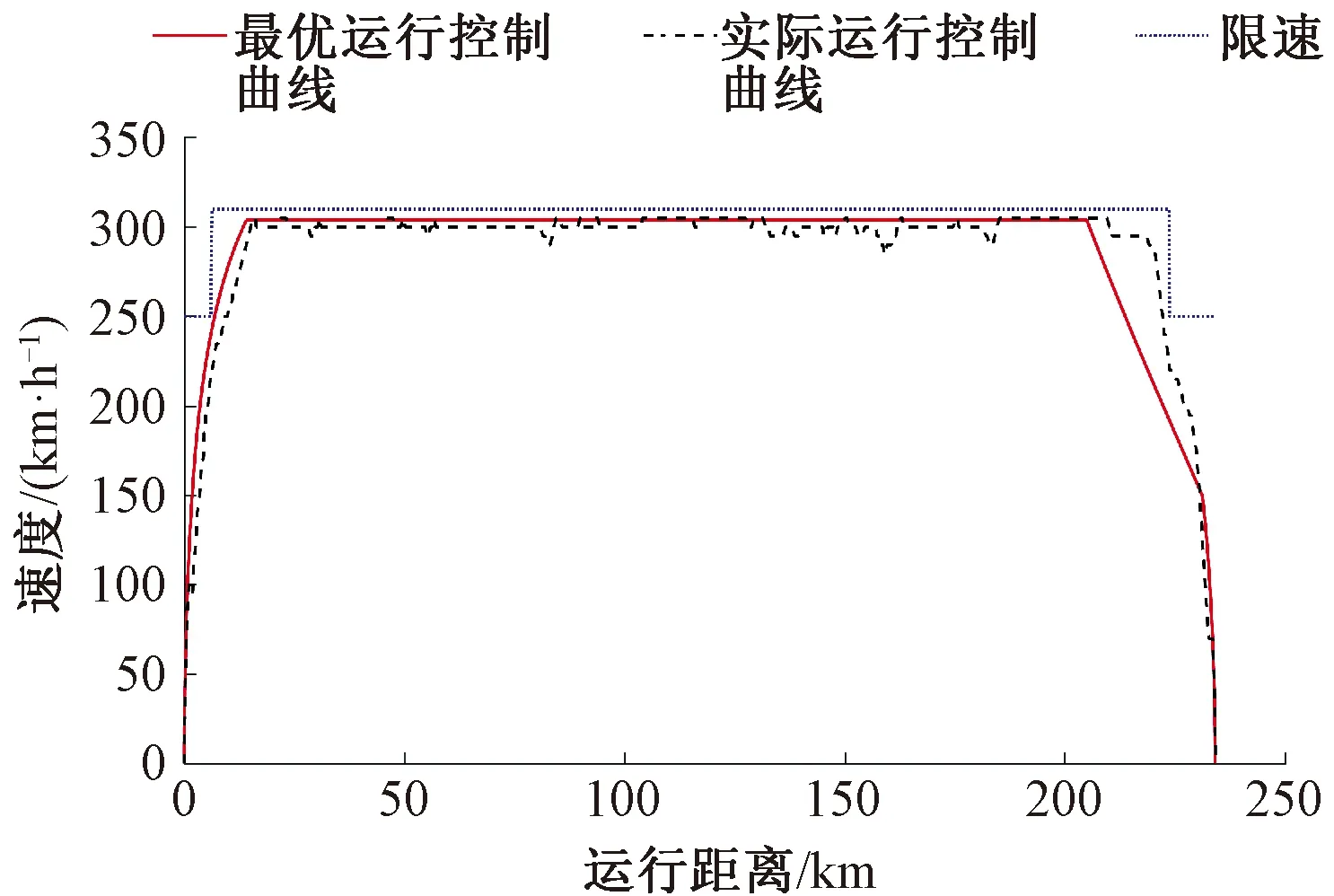
图6 单列车最优运行轨迹
分析编队间列车发车时间间隔与追踪距离关系,仿真计算结果见图7,编队间列车最小发车时间间隔为211 s,列车追踪运行Lreal与Lsafe差值最小为53.6 m,符合安全约束且不再有可利用冗余间隔。

图7 编队间列车追踪运行距离
4.1.2 编队列车群体运行控制多目标优化
基于SOA求解编队列车运行优化问题,结果如表4所示,运行轨迹见图8。
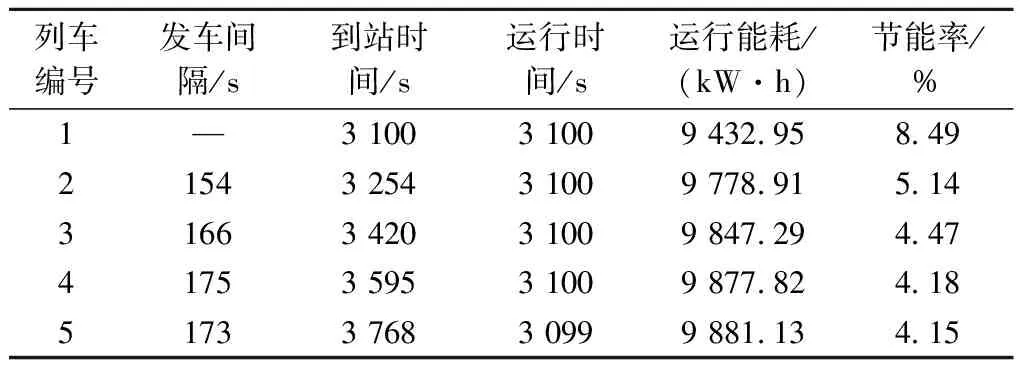
表4 编队列车追踪运行控制最优结果
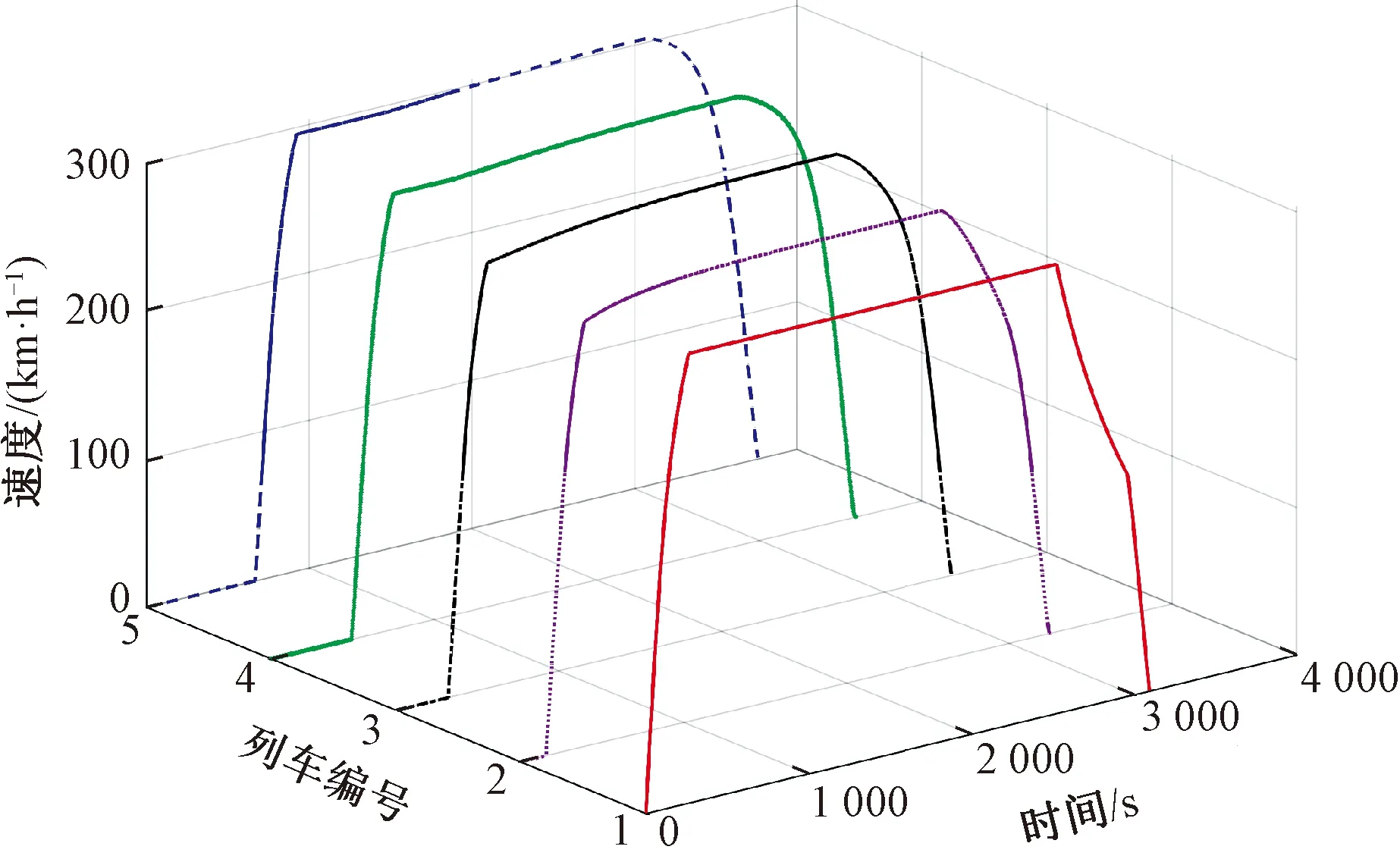
图8 编队列车追踪运行优化轨迹
运行过程中高斯舒适度值始终大于0,满足舒适度要求。相邻列车间追踪运行距离见图9,Lreal始终大于追踪列车允许Lsafe;追踪列车经牵引加速后,相邻列车间Lreal与Lsafe差值不大于550 m,满足安全约束,充分利用相邻列车间冗余间隔距离。

图9 相邻列车追踪运行距离
编队前后列车群体运行指标如表5所示,相比非编队运行,列车编队运行线路占用时间减少189 s,线路运行效率提升;相比实际运行,列车编队运行能耗降低5.29%。保障安全基础上,经列车编队运行优化,提升铁路线路运输能力,降低运行能耗,保障乘客舒适度,实现高效、节能、舒适多目标优化。

表5 不同场景下列车群体运行指标
4.2 延误场景下编队列车群体合作调整优化
设置4列车组成2个编队运行。1编队前行列车1以4.1.1节求解最优轨迹运行,后续列车追踪运行。设定列车1在区间正常运行25 km时,接收临时限速指令,导致运行延误,限速区段为30~63 km,临时限速为250 km/h。
1编队内2列列车基于ICS算法进行编队列车协同调整后运行数据如表6所示。1编队列车1延误,重新规划剩余区间运行速度轨迹,能够有效消解延误;而由于编队内列车间隔较小,受运行安全约束,因列车1区间限速影响,列车2偏离既定运行计划,无法正点到站,区间运行时间为3 132 s,编队内部具有一定的延误消解能力。

表6 1编队内列车延误调整结果
1编队内列车延误调整后,1编队列车2与2编队前行列车3追踪距离见图10。编队内部调整未完全消解延误,列车3不能以4.1.1节最优运行轨迹实现编队间安全追踪,调整2编队列车加入1编队追踪运行。2编队列车3与列车4加入1编队,基于4.1.2节的SOA求解的优化结果重新规划运行过程,调整后运行数据如表7所示,运行轨迹见图11,列车追踪距离见图12。
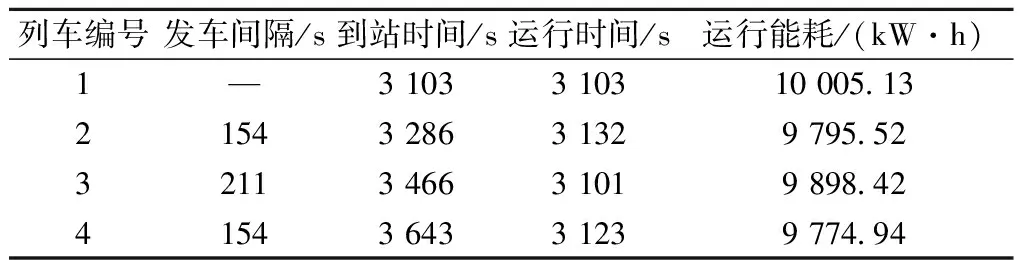
表7 编队间延误调整结果
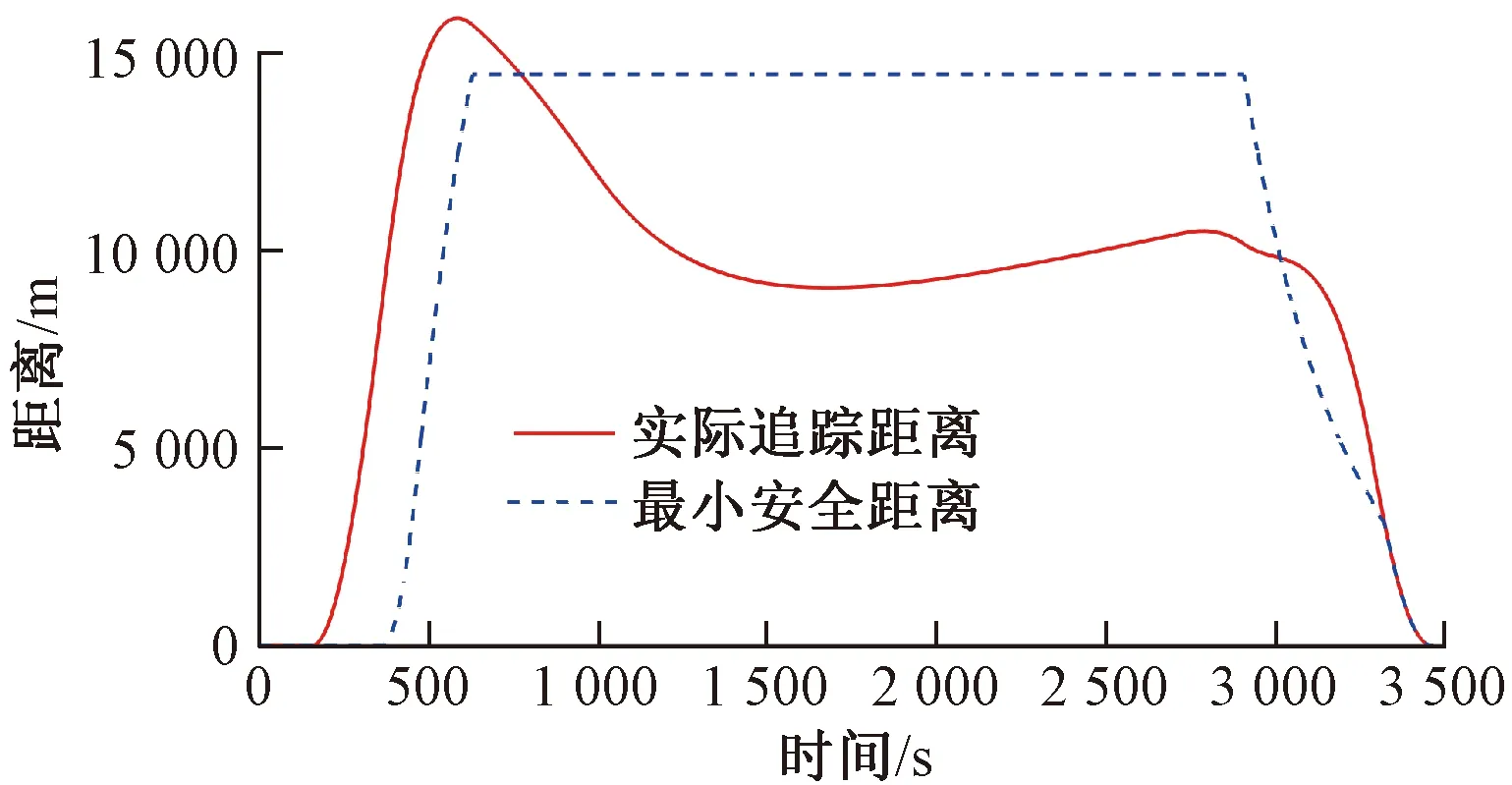
图10 编队间列车追踪距离
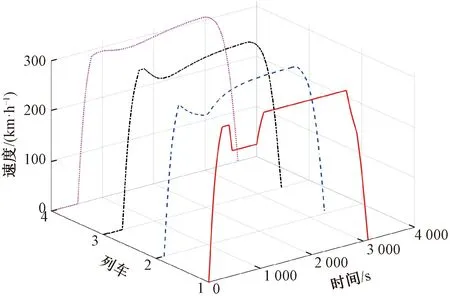
图11 编队间运行调整列车运行轨迹
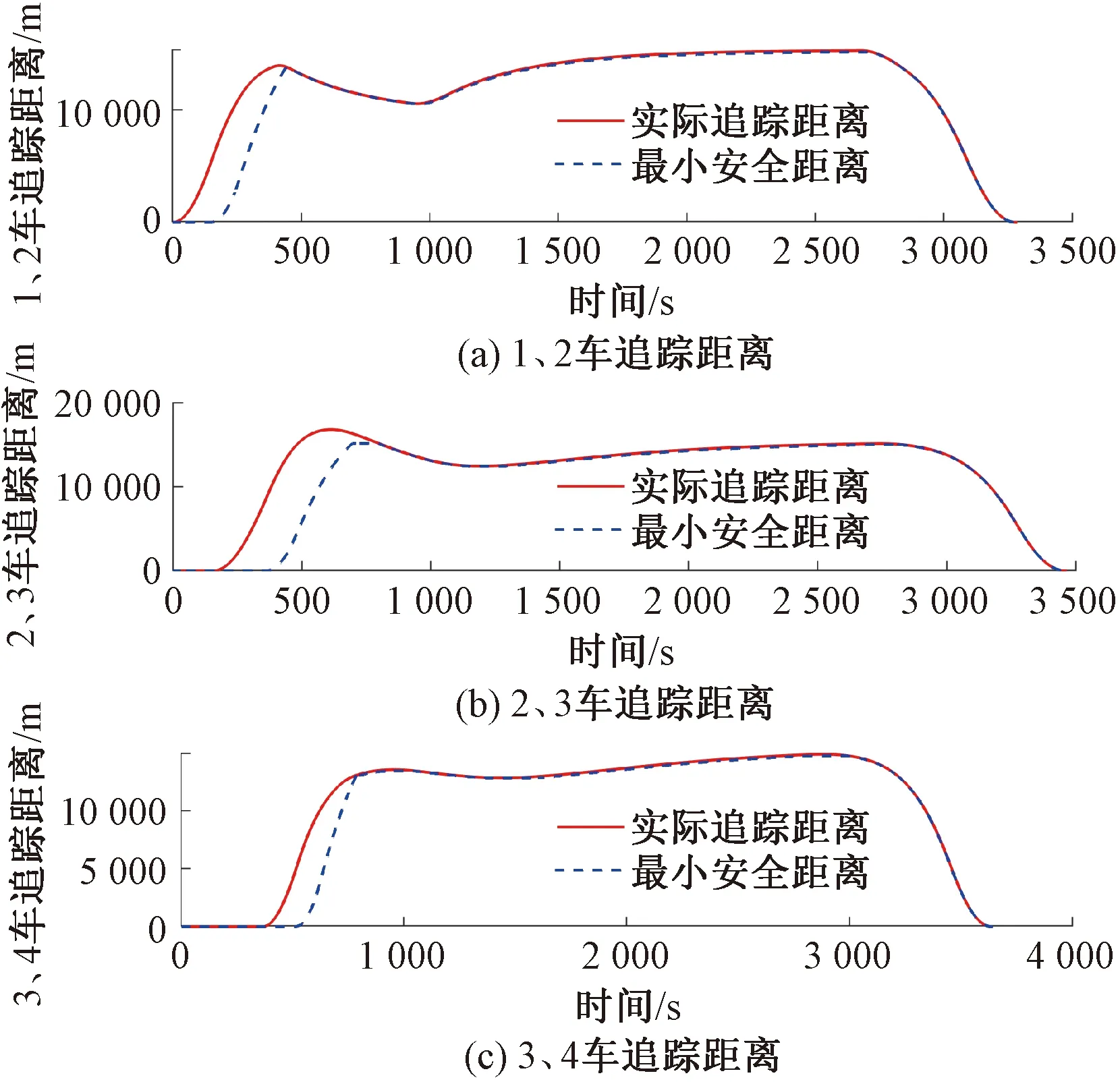
图12 编队间延误调整后列车追踪距离
满足列车安全追踪要求,列车3区间运行时间为3 101 s,恢复正点运行,列车4区间运行时间为3 123 s,延误得到部分消解。编队列车运行延误情况如表8所示。经调整优化,相比调整前,如表9所示,延误列车总数减少2列,总延误时间减少377 s,有效缓解列车延误传播,减少了列车延误数目和总延误时间。
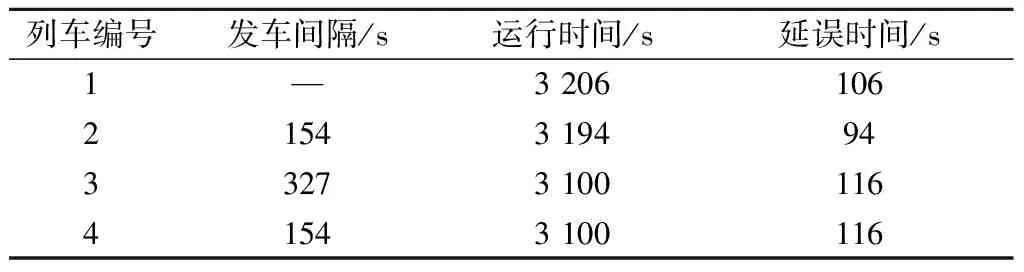
表8 延误场景下编队列车运行情况

表9 延误调整前后编队列车延误情况
5 结论
本文针对高速列车群体区间多目标运行优化问题。基于群体合作演化对高速列车进行编队追踪运行控制与多目标优化建模,构建编队列车追踪速度控制合作演化策略与延误场景下编队列车运行调整策略;提出编队列车群体多目标优化方法,采用SOA优化求解列车发车时间间隔和速度控制策略曲线,使用ICS调整优化受延误编队列车运行轨迹。基于武广线“赤壁北—长沙南”区间列车实际运行数据进行仿真验证。结果表明,基于群体合作演化进行高速列车编队运行优化,可实现铁路系统载运能力增强、列车运行能耗降低、乘客舒适度提升的列车运行多目标优化,消解较小延误,缓解列车延误传播,具有一定理论意义和现实价值。
本文仅考虑列车在区间的运行优化问题,实现高密度行车与优化还需分析列车群体在车站的接发作业,列车编队的车站接发控制优化是今后的研究方向。
猜你喜欢
中学数学研究(广东)(2023年9期)2023-06-03
军事文摘(2023年5期)2023-03-27
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
铁道通信信号(2020年1期)2020-09-21
北京航空航天大学学报(2017年3期)2017-11-23
铁道通信信号(2016年8期)2016-06-01
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
中国铁道科学(2015年6期)2015-06-21
海军航空大学学报(2015年4期)2015-02-27
导航定位与授时(2014年2期)2014-04-27
