
基于三维卷积神经网络的交通事件检测系统
2023-09-05 04:41梁宇
西部交通科技 2023年5期
梁 宇
(广西壮族自治区收费公路联网收费清分结算中心,广西 南宁 530022)
0 引言
随着全球城市化进程的加速,交通拥堵和交通事故问题日益严重。为确保道路交通安全和畅通,对交通事件进行有效的实时检测成为当务之急[1]。目前,交通事件检测主要采用传统图像处理方法[2]、基于二维卷积神经网络方法[3]和其他机器学习方法[4]。
传统图像处理方法,如光流法、背景减除法等,虽在一定程度上能够实现交通事件检测,但其对于复杂场景的适应性较差,且易受光照、遮挡等因素影响。基于二维卷积神经网络[5]的方法在检测准确性上有显著提升,然而其在处理时序信息方面的能力有限,难以捕捉事件的动态变化。其他机器学习方法,如支持向量机等,虽然可以实现一定程度的事件检测,但在处理大规模高维数据时,计算复杂度较高,实时性受到限制。
针对现有方法的不足,本文提出了一种基于三维卷积神经网络(3D CNN)的交通事件检测系统[6]。3D CNN在空间和时间维度上进行卷积操作,能够有效地捕捉交通事件的时空信息。相较于传统方法和二维卷积神经网络,基于3D CNN的方法具有以下优点:(1)整合时间信息,能够捕捉交通事件的动态变化,提高检测准确性;(2)在处理大规模高维数据时,计算复杂度较低,有利于实现实时性能。
1 关键技术
1.1 三维卷积神经网络(3D CNN)
三维卷积神经网络(3D CNN)是一种在空间和时间维度上进行卷积操作的深度学习模型,能够有效地提取交通事件视频数据中的时空特征(见图1)。3D CNN包括卷积层、池化层和全连接层。卷积层负责提取交通事件视频的局部时空特征,通过在输入数据的宽、高和时序三个维度上执行卷积操作。可以将第i个三维卷积层中第j个特征图上位置(x,y,z)处的值γ的数学表达式写为:
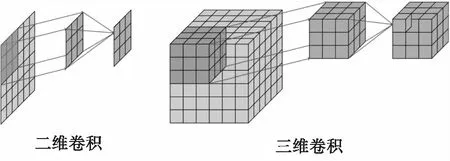
图1 二维卷积与三维卷积示意图
(1)
式中:f——激活函数;


M(i-1)——第(i-1)层的特征图数量;
Pi和Qi——三维卷积核的高和宽;
Ri——其在时间维度的长度;
ω和b——通过训练在数据集中学习得到。
池化层的作用是减小特征映射的空间大小,减小计算复杂度,同时保留关键信息。全连接层负责将前层的输出与输出层相连,实现特征整合以及对交通事件的最后分类。
1.2 数据预处理
为了提高模型在交通事件视频数据上的泛化能力,数据预处理是必不可少的环节。数据预处理包括数据扩充和规范化处理。数据扩充可以通过对原始交通事件视频进行随机旋转、翻转、裁剪等操作,增加模型训练时的样本多样性,降低过拟合风险。标准化处理即归一化,可将输入交通事件视频数据缩放到相同的范围内,有助于提高模型收敛速度和稳定性。
1.3 模型训练与优化
在模型训练阶段,需确定损失函数、优化策略以及评价指标。损失函数衡量模型在交通事件视频数据预测结果与实际标签间的差异,主要的损失函数有交叉熵损失、平均平方误差损失等。本系统使用前者作为损失函数,其表达式如下:
(2)
式中:N——样本数量;
y——网络的预测值;

优化方法负责调节模型参数以降低损失函数的值,如随机梯度下降(SGD)、Adam等。梯度下降法的表达式如下:
θ=θ-α*∇L(θ)
(3)
式中:θ——模型参数;
α——学习速率;
∇L(θ) ——损失函数L关于模型参数θ的梯度。
评价指标用于量化模型在交通事件视频测试集上的表现,典型指标包括准确率、召回率和F1分数等。
2 系统架构设计
2.1 功能要求
2.1.1 实时交通事件监测
实时交通事件监测作为系统的关键功能之一,其目的是实时分析道路图像数据,自动识别交通事件并即时报告。系统采用基于3D CNN的策略,高效地提取视频序列中的时空特征。通过高效的计算和优化技术,系统可以在短时间内处理大规模高维数据,确保监测结果的实时性。
2.1.2 交通事件分类与识别
除了实时监测交通事件外,本系统还具有对交通事件进行分类与识别的能力。通过对各类交通事件进行标注和学习,系统能够自动识别多种交通事件,如车辆逆向行驶、停车异常、行人闯入等。这些分类数据能够助力交通管理机构制定有针对性的应对措施,从而提升道路交通效率与安全性。
2.1.3 数据可视化与报警
为方便用户和交通管理部门了解实时交通情况,本系统还提供数据可视化与报警功能。系统将检测到的交通事件以直观的方式展示在用户界面上,并在发现紧急事件时发出警报。另外,系统还能产生历史数据报告,有助于用户分析交通情况的变迁趋势,并为交通策划与管理提供有力的决策依据。
2.2 架构设计(图2)

图2 基于三维卷积神经网络的交通事件检测系统架构图
2.2.1 数据采集层
数据采集层负责实时获取来自摄像头或其他视频数据源的视频流。该层需要确保数据的高质量和实时性,以便于后续处理。为了提高系统的可扩展性,数据采集层支持多种数据格式和输入源,包括IP摄像头、文件存储的视频数据等。
2.2.2 数据预处理层
数据预处理层对收集到的初始视频数据加以处理,以满足后续三维卷积神经网络层输入要求。主要处理过程包括视频帧的抽取、缩放、归一化和数据增强。通过这些处理阶段,有助于降低数据噪声、增强模型泛化性能,进而提升交通事件识别的准确度。
2.2.3 三维卷积神经网络层
三维卷积神经网络层作为本系统的关键部分,负责对经过预处理的视频数据进行深度学习。通过卷积层、池化层和全连接层,该层自动提取交通事件的时空特征,对不同类型的交通事件进行识别和分类。模型训练和优化在此层进行,以保证系统在实际应用中的高准确性和实时性。
2.2.4 结果分析与展示层
结果分析与展示层将三维卷积神经网络层的输出结果进行解析和可视化。该层提供实时监控画面,将交通事件的识别信息叠加在原始视频画面上,使用户能够直观地了解当前交通状况。此外,该层还支持自动报警功能,当检测到重大交通事件时,会向相关人员发送报警通知。
3 应用效果
3.1 试验设置
3.1.1 数据集描述
本试验采用了一个包含多种交通事件的视频数据集进行训练和测试。数据集涵盖众多城市道路及高速公路的交通监控视频片段,包含了如逆行行驶、非正常停靠、行人侵入、火警、异常抛撒物等典型交通事件。为了评估模型在不同场景下的泛化能力,数据集还包含了不同天气、光照和拍摄角度下的视频。数据集中的视频已进行标注,包括事件类型、发生时间和位置信息,以便于模型训练和评估。
3.1.2 网络参数与试验环境
采用一个经过预训练的三维卷积神经网络模型作为基础结构,并对其进行适当调整以适应交通事件检测任务。关键网络参数涉及卷积层个数、卷积核尺寸、池化层配置等。在试验过程中,采用交叉验证技术对模型进行了训练与验证,以确定最优网络参数。表1为试验使用的网络参数。
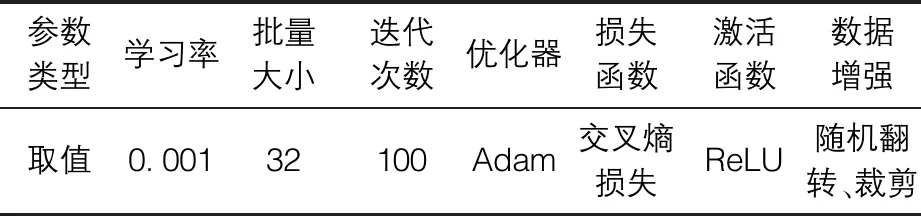
表1 试验参数设置表

表2 各类交通事件检测结果表
试验环境方面,本研究使用了具有i7-8700处理器、32G内存以及RTX 2070显卡的计算机进行模型训练和测试。为了确保试验结果的可重复性,本文采用了TensorFlow深度学习框架,并统一了随机数种子、初始权重等相关设置。
3.2 试验结果
3.2.1 交通事件检测准确率
通过对测试集数据进行评估,基于三维卷积神经网络的交通事件检测系统表现出了较高的准确率。试验显示,该模型在处理车辆逆行、异常停车、行人闯入、火灾、异常抛撒物等交通事故检测任务时,整体识别准确率高达92%,相较于传统视频分析方法有显著提升。这说明所提出的基于三维卷积神经网络的方法具有较强的泛化能力,能够在多种复杂场景下有效地识别交通事件。
3.2.2 交通事件分类与识别效果
试验结果还显示,所提出的方法在各类交通事件的分类与识别上也具有优良表现。具体来说,该方法在车辆逆行、异常停车、行人入侵、火灾、异常抛撒物等事件的识别准确率分别为89.2%、93.3%、91.7%、95.3%、90.4%,这些结果均超过了传统方法在相应任务上的表现。表明该方法在处理不同类型交通事件时,都能取得较好的分类与识别效果。
4 结语
本文主要研究了基于三维卷积神经网络(3D CNN)的交通事件检测系统。该系统采用了数据采集层、数据预处理层、三维卷积神经网络层和结果分析与展示层四层架构设计,实现了实时交通事件检测、交通事件分类与识别以及数据可视化与报警等功能。试验结果表明,该系统在多种交通事件类型上的识别准确率均较高,具有较强的泛化能力和实用性。
未来工作还需关注以下方向:(1)持续对模型结构和参数进行优化,旨在进一步增强交通事故检测的准确性和实时响应能力;(2)将尝试引入多模态数据,如融合车载传感器数据,以提高系统的鲁棒性;(3)考虑将系统应用于更广泛的场景,如智能交通管理、无人驾驶等领域,为现代交通管理提供更多的技术支持。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
童话世界(2020年32期)2020-12-25
电子制作(2019年19期)2019-11-23
电子制作(2019年11期)2019-07-04
小学生导刊(2018年16期)2018-07-02
北京航空航天大学学报(2018年1期)2018-04-20
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
海军航空大学学报(2015年4期)2015-02-27
电视技术(2014年19期)2014-03-11
