羽毛球极限挥拍速度与Fourier级数展开
2023-08-26 14:00董一诺沈轩昊聂子坤梁熠宇
当代体育科技 2023年22期
董一诺 沈轩昊 聂子坤 梁熠宇*
(1.北京交通大学数学与统计学院;2.北京交通大学物理科学与工程学院 北京 100044)
1 问题提出
羽毛球是一项隔着球网,使用长柄网状球拍击打羽毛球的一种小型球类室内运动项目。羽毛球作为一项深受大众喜爱的隔网对抗型体育运动,在杀球的过程中球拍接触到球时是否能达到最大速度决定了杀球威力的强弱,也是羽毛球竞技的击球水平与观赏性的体现[1]。为了研究羽毛球的极限速度,需要将挥拍的极限速度测量出来,目前市面上的挥拍测速装置都需要置入对应传感器的球拍,并且只能测出最大速度,无法测出身体其他部位的发力速度以及最后挥出的位置。该研究的意义在于更好地为羽毛球爱好者寻找出自己的不足,并提供更精确的理论训练指导,也对羽毛球初学者如何做到正确的挥拍动作提供了指导。
2 模型建立
研究发现,挥拍时球拍的运动轨迹可以简化为二维平面上的运动,根据人体挥拍时发力的特点:由身体、肩关节、大臂、小臂、手腕,多个部分首尾相接共同发力。这一特点与复平面下傅里叶级数展开十分相似。因此,选择傅里叶在复数域下的展开,通过在复平面上建立首尾相接的多段向量,进行进一步计算。这里,简化地假设肩、肘和腕关节的旋转是独立的,且沿同一方向。实际建模中,可能需要考虑关节间的耦合以及不同关节的旋转轴。
复数域下的傅里叶级数展开为:
傅里叶级数可以看作是将一个周期函数分解为一系列复数向量。这些向量首尾相接,表示一个复数平面上的旋转和缩放操作。在复数域下的傅里叶级数表示中,每个指数函数exp(inx)表示一个旋转向量,其长度为复数系数Cn。当对所有整数n 求和时,实际上是将这些复数向量首尾相接,最终得到周期函数f(x)在每个点上的值。从几何的角度来看,每个复数系数Cn定义了一个向量,其长度和方向分别由Cn的模和辐角决定。这些向量按照不同的频率旋转,形成了一个相互连接的向量链。将这些旋转向量相加,可以得到原始周期函数在任何给定点的值。
根据身体各部分的数据和角速度,建立一个运动学模型。这个模型可以表示为各关节和球拍端点之间的向量方程。根据这些方程,可以计算球拍端点在挥拍过程中的速度和加速度。将角速度数据代入运动学模型,计算球拍端点在挥拍过程中的速度和加速度。
球拍端点速度=大臂长度×肩关节角速度+小臂长度×肘关节角速度+球拍长度×腕关节角速度[2]。
这个简化的运动学模型基于以下假设:(1)肩、肘和腕关节的旋转是独立的;(2)所有关节沿着同一方向旋转;(3)身体各部分的质量分布对速度计算没有影响。
2.1 傅里叶变换
快速傅里叶变换(FFT,Fast Fourier Transform)是一种高效计算离散傅里叶变换(DFT,Discrete Fourier Transform)及其逆变换的算法。DFT 是一种将信号从时域变换到频域的数学方法。在信号处理、图像处理、通信等领域中,FFT算法被广泛应用,因为它比直接计算DFT更加高效[3]。
上述公式X(k)为离散傅立叶变换(Discrete Fourier Transform,DFT)的定义。它将一个离散序列x(n)转换为另一个离散序列X(k),其中x(n)是原始序列的时域数据,X(k)是该序列在频域的表示。对于频域序列中每个索引k,都计算时域序列x(n)乘以指数项exp(-2πikn/N)的和。这便得到了频域序列X(k)的值。
使用FFT算法[4]得到的主要频率分量图见图1。
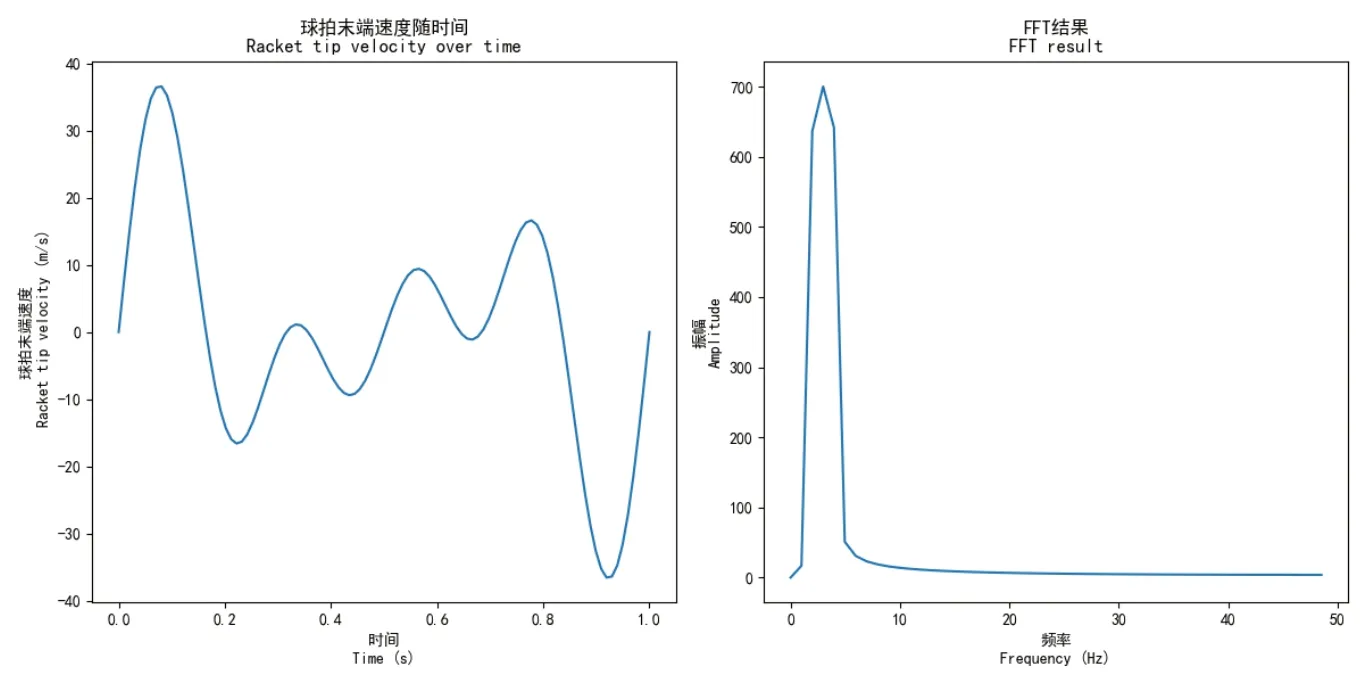
图1 FFT频率分量图
球拍末端速度随时间显示了球拍端点速度随时间的变化。x 轴表示时间(单位:s),y 轴表示球拍端点的速度(单位:m/s)。从图中可以看出,速度信号呈现出周期性变化的特点。实际应用中,角速度数据将来源于传感器或视频分析,所以可能呈现出不同的形状和特征。
FFT 结果显示了速度信号的傅里叶变换结果。x轴表示频率(单位:赫兹),y 轴表示振幅。可以看到,FFT 结果呈现出明显的尖峰,这些尖峰对应速度信号中的主要频率分量,揭示了不同频率分量对整个挥拍过程的贡献[5]。
2.2 计算理论极值
设l为力臂,w为旋转的角速度
先以一阶为例:
推广至三阶:
当t=0时,v取得最大值。
计算四阶:
当t=0时,得到羽毛球的极限速度为:
3 实际分析
3.1 OpenPose的相关应用
OpenPose人体姿态识别项目是美国卡耐基梅隆大学(CMU)基于卷积神经网络和监督学习,并以caffe 为框架开发的开源库。可以实现人体动作、面部表情、手指运动等姿态估计,适用于单人和多人。OpenPose 提出Part Affinity Fields(PAFs),每个像素是2D 的向量,用于表征位置和方向信息。基于检测出的关节点和关节连通区域,使用greedy inference 算法,可以将这些关节点快速对应到不同人物个体[6]。
3.2 动量守恒及能量守恒定律的相关应用
羽毛球拍击球时可近似为弹性碰撞,由动量守恒和能量守恒定律可知:弹性碰撞前后系统的总动能不变,对两个物体组成的系统的正碰情况满足:
碰后m1的速度几乎未变,仍按照原方向运动,质量小的物体以两倍v1的速度向前运动。
3.3 羽毛球爱好者挥拍分析
收集身边羽毛球爱好者挥拍视频作为案例,首先进行相关测量,截取视频中球速最快的两帧并拼接计算转动角速度,最终得出相关数据。
如图2所示,测量得到球拍旋转的角度为6°,测量可知球拍长度67 cm,身体部分参数为:大臂30 cm,小臂35 cm。已知截取视频的放慢倍速为32 倍,帧率为30帧/秒,得到实际速度为33.67 m/s。

图2 羽毛球爱好者小臂挥拍截图及OpenPose模型建立
下一步进行理论速度的计算,球拍旋转的角度为6°,间隔的时间为0.002 s,得出角速度w1=50.265 rad/s;测量得出小臂旋转的角度为31°,计算得出角速度w2=14.840 rad/s;测量得出大臂旋转的角度为32°,得到间隔的时间为0.147 s,计算得出角速度w3=3.803 rad/s,线性叠加得到的理论速度为:0.67×50.262+0.35×14.840+0.3×3.803=40.01(m/s)。
实际值与理论值之比为:33.67/40.01≈0.84。
3.4 专业运动员挥拍分析
根据指导教师给出的人体骨架模型,对运动员进行相关分析计算(见图3)。
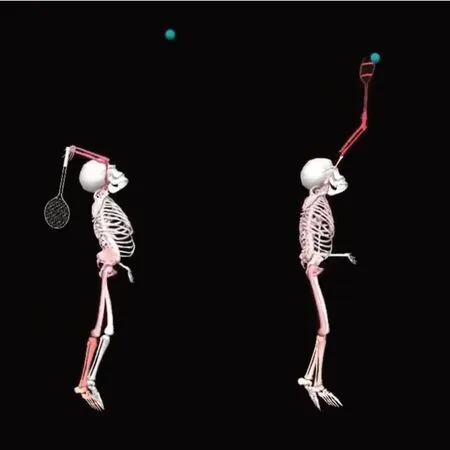
图3 人体骨架模型相关演示
因为放慢倍数未知,可取系数a,本工作的结果是求出实际速度与理论速度的比例,故可将放慢倍数省略,通过计算得到时间为0.067 s,l为球拍长度67.5 cm,可得s=0.349 m,得到实际速度为5.24 am/s。
下一步进行理论速度的计算,球拍旋转的角度为32°,间隔的时间为0.1 s,计算得出角速度w1=6.283 rad/s;测量得出小臂旋转的角度为37°,得到间隔的时间为0.3 s,计算得出角速度为w2=2.153 rad/s;测量得出大臂旋转的角度为31°,得到间隔的时间为1 s,计算得出角速度为w3=0.541 rad/s;测量得出身体旋转的角度为31°,得到间隔的时间为5.633 s,得出角速度为w4=0.096 rad/s。线性叠加得到的理论速度为0.67×6.28+0.35×2.15+0.3×0.54+1.7×0.096=5.28(am/s)。
实际值与理论值之比为:5.24/5.28≈0.992。
4 结论与建议
通过模型建立以及对案例的具体分析,从普通人和运动员两个部分分别分析。先将羽毛球运动分解为大臂、小臂、身体转动和球拍四部分,逐步分析实际速度与理论速度的差别。通过分析得出:业余球员挥拍速度主要依靠最后一个关节的角速度,在缺少身体转动的时候依旧只能达到理论值的84%。而职业球员四段发力的传导完整,实际速度与理论速度高度一致。故对于业余球员来说,提升球技依旧需要锻炼挥拍的集中发力,加强整体发力的协调性,这比单纯的力量训练对球速的提升更明显。
猜你喜欢
数学小灵通(1-2年级)(2022年11期)2022-11-21
幼儿画刊(2022年8期)2022-10-18
包装与食品机械(2021年5期)2021-11-06
环境技术(2021年4期)2021-09-11
制造技术与机床(2019年12期)2020-01-06
组合机床与自动化加工技术(2019年5期)2019-05-24
数学小灵通(1-2年级)(2017年11期)2017-11-29
读写算·高年级(2017年8期)2017-08-09
载人航天(2016年4期)2016-12-01
综合智慧能源(2014年1期)2014-09-10