
BIM 技术引入对建筑脚手架不安全行为识别的研究
2023-08-10 04:29:24马昊源潘永刚
中国建设信息化 2023年14期
马昊源 潘永刚
(新疆大学)
脚手架被大量应用于建筑工程的各个阶段,无论是基坑开挖、主体修建还是装饰装修都有脚手架的使用,建筑脚手架安全是建筑工程中必须重视的问题,通过对国家应急管理部网站、各省市自治区生产监管部门网站及其他相关网站收集到的数百起脚手架安全事故报告进行统计分析,可知,脚手架不安全行为主要引发高空坠落、物体打击和架体失稳三种安全事故,其所占比例已超总事故数的66.5%,而脚手架安全事故主要引发脚手架损坏、伤人、损毁等问题,因此快速准确识别脚手架存在的不安全行为是迫切的。脚手架主要分为扣件式脚手架、门市钢管脚手架、碗扣式脚手架、盘扣式脚手架以及铝合金脚手架,使用过程分为搭设、使用和拆除三个阶段,在三个阶段中影响脚手架安全因素主要有人、环境、工艺和管理四个方面,通过合理、便利的管理方式能够降低人、环境和工艺带来的不良影响。目前关于脚手架安全管理的研究主要有,吴必龙[1]从脚手架构造研究与标准化设计上对脚手架安全性进行了论证。Wu 等[2]提出了基于 RFID 技术的自组织实时追踪系统的框架,用于对潜在安全事故的分析与预警。Pisheh[3]通过对脚手架坍塌原因的分析,运用信息科技提高脚手架现场的安全性。Zhang[4]等提出在 BIM 模型的基础上自动分析检查安全隐患并完成防护措施设置。郭红领等[5]针对作业人员的不安全行为,提出 BIM 和 PT 技术结合的不安全行为预警系统,通过获取、处理和反馈工人位置和行为信息,实现现场事故的预防。赵江平等[6]基于图像识别技术对作业人员在有限空间中作业发生的跌倒事故进行识别。张伟胜[7]探索了基于规范标准的安全规则的价值,在设计-安全理论的支持下,集成 BIM技术自动识别设计不安全因素。
基于以上分析,本文通过调研分析脚手架搭设、使用、拆除时的安全现状,针对出现的不同安全影响因素通过构建BIM 仿真模型对其存在的不安全行为进行识别预警,并提供相应的措施建议,以达到降低安全事故、减少经济损失、提高施工效率的作用。
1.脚手架不安全行为现状与问题
1.1 不安全行为现状分析
脚手架中的不安全行为可能会引发安全事故的发生,通过文献分析、专家访谈及问卷调查的方式发现现阶段脚手架中不安全行为主要分为人的不安全行为和由物不安全状态引发的不安全行为。本文将通过采集人和物的实时数据与仿真BIM 模型比对识别,并对识别的人和物所引发的不安全行为进行分析研究。
1.1.1 人的不安全行为
建筑工程由不同工种的工人通力合作共同完成,在建筑脚手架工程中,人全程参与到脚手架的搭设、使用和拆除过程中,人的因素将是脚手架工程中必须考虑的重要因素之一。在脚手架全生命周期内存在安全区和非安全区(即施工区域),当脚手架处于搭设和拆除阶段时,无关人员未经允许进入非安全区(即施工区域)时将可能发生安全事故,如物体打击、高空坠落等问题;当施工人员进入非安全区(即施工区域)时未按规定使用安全措施,如佩戴安全帽、悬挂安全绳等;施工人员在非安全区域活动时易发生高空坠落的风险;施工人员违规操作,如搭设不规范、地基处理不当等。以上因人的不安全行为都可能引发安全事故,造成人员伤亡和经济损失。
1.1.2 物引发的不安全行为
在脚手架工程中物引发的不安全行为往往可能引发影响更大的安全事故。物的不安全行为主要指人不易发现和察觉的安全隐患,当物已存在安全隐患时还被认为处于安全状态,并继续正常使用,最终引发安全事故,造成人员伤亡和经济损失。通过调研分析,物所引发的不安全行为主要有以下问题。
(1)架体失稳。脚手架在使用过程中受到不同大小和不同方向的荷载作用,如风荷载、永久荷载和施工荷载等。在不同时间段内不同荷载作用于架体可能导致架体偏移,造成架体失稳问题,最终导致脚手架坍塌。如受到风荷载造成架体整体偏移或局部偏移,但因为偏移程度不易通过肉眼发现,架体长时间使用将导致架体整体倒塌,造成人员伤亡。
(2)荷载超标。在脚手架使用过程中架体上堆积的物体和人员的重量超出脚手架规定的允许荷载值。在《建筑施工扣件式钢管脚手架安全技术规范》JGJ-130-2011 中对不同结构脚手架的荷载承受值有相关的设计要求。在脚手架的实际使用中施工人员往往忽视脚手架架体所能承受的最大荷载值,肆意的使用脚手架,堆积各种材料和杂物,随意的在架体上行走和施工,最终可能导致其所承受荷载值远远超过脚手架允许的最大荷载,从而引发脚手架的整体倒塌,造成人员的损失和物资的损失。
(3)部件损坏。脚手架搭设、使用和拆除时,脚手架的固定点是保证脚手架整体稳定性的有利保障。但在脚手架工程中脚手架固定点状态识别监测是比较困难的,施工管理人员无法时刻监督固定点的状态,导致不能实时了解固定点的受力情况,保证架体的稳定性,引发脚手架杆件断裂,固定点松动等问题,造成工期拖延、人和物的损失。
1.2 脚手架安全状态实时判别难
在建筑工地中脚手架安全状态的判别主要通过为人工判别的方式进行判断,但判别时间往往是阶段式的,只有在特定的时间内才会对脚手架的安全状态进行检查。人的不安全行为和物所引发的不安全行为不能够达到实时识别和实时预警功能。以上不安全行为问题的识别发现和问题解决都主要依赖于人,而人是施工作业中的最不可控因素之一,因此,只有尽量减少人的影响才能确保安全状态的正常识别和预警,引入BIM 技术识别建筑脚手架工程安全状态是有必要的,能够有效减少不可控因素的影响,最大限度的保证建筑脚手架的安全状态。
1.3 脚手架安全识别预警难
建筑脚手架的安全问题十分重要,如何避免脚手架安全事故是安全管理的重中之重,但目前脚手架安全识别在建筑工程中没有系统性的识别预警机制,建立覆盖建筑脚手架全生命周期及系统性的识别预警机制是解决这一问题的关键。在脚手架的全过程中没有统一的识别标准对脚手架工程中人和物所引发的不安全行为进行识别预警,建立标准化的虚拟仿真脚手架BIM 模型作为识别基础,能够起到快速识别的作用,避免脚手架安全事故的发生。
综上所述,为解决建筑脚手架全过程的安全问题,应减少人为因素的影响,并对脚手架工程进行安全状态实时识别监测。一是要准确分析收集脚手架工程不安全行为影响因素;二是准确识别不安全行为因素;三是及时提供识别预警和补救措施。
2.脚手架工程不安全行为识别
2.1 仿真模拟识别系统的构建
仿真模型识别系统将基于BIM 技术搭建仿真模型,实现仿真模型数据化、可视化和模拟化,利用仿真模型与实际数据进行比对识别,仿真模拟系统将分为数据采集、数据识别、比对分析和预警方案四部分,仿真模拟识别系统如图1所示。

图1 仿真模拟识别系统
(1)数据采集。脚手架工程中人和物实际状态的记录是极其重要的,通过人工采集和机器采集两种方式采集脚手架工程现场人和物的具体情况,以此作为与仿真模型比对的基础数据。如通过手持设备拍照记录脚手架结构和构件外表状况;通过定位器记录人员轨迹和所出区域;通过激光扫描仪扫描架体的整体结构;通过拉力、压力传感器记录固定点受力情况等;通过人工和机器相结合的方式,保证脚手架工程区域内人和物数据的连续性,确保采集的数据具有准确性和实时性,为仿真模拟识别系统提供有利的数据支持。
(2)数据识别。将采集到的数据进行处理分析以达到能与仿真BIM 模型进行比对的目的。如利用人工筛选处理的方式剔除模糊不清和拍摄不完整的图片,保证拍摄图片的完整性和有效性;利用人工智能筛选识别脚手架各对应位置记录的数值情况,并对数值进行统计分析和预测;利用人工与人工智能相结合的方式处理收集到的复杂数据,将图片和数值数据化,便于与仿真BIM 模型进行比对。确保脚手架工程现场实时情况在第一时间进行处理和传输,能够准确有效及时的与虚拟仿真模型进行比对识别,以此达到对建筑脚手架工程不安全行为的识别预警。
(3)比对分析。以脚手架工程虚拟仿真BIM 模型为参照,将引发不同危险类型相关数据与虚拟仿真模型进行人工或人工智能算法比对识别,如数值比对识别、外形外貌识别等,最终形成不同等级的提示预警,提供对应等级的提示预警,避免不安全行为发生,预防安全事故。
(4)预警及方案提供。主要包括不安全行为识别预警和方案提供两个功能,以终端和平台预警的方式进行提示预警和方案提供,在预警的同时提供解决方案以供施工管理人员选择。预警将安全等级分为绿色预警(D1)、黄色预警(D2)和红色预警(D3),绿色预警表示脚手架为安全状态符合使用规定;黄色预警表示脚手架存在安全隐患,需检修后使用;红色预警表示架体危险需立即检修或拆除。
2.2 不安全行为比对识别
在建筑脚手架搭设前,通过脚手架的高度、跨度等具体数据利用Revit 对脚手架的结构进行BIM 模型模拟搭设,形成立体可视的标准脚手架仿真BIM 模型。对建筑脚手架中不安全行为的识别,将利用实际数据加入人工或算法识别,得出结果再与仿真BIM 模型进行比对分析,能够一定程度识别出脚手架工程中人的不安全行为和物所引发的不安全行为,从而减少建筑脚手架工程中不安全行为的发生,避免发生安全事故,起到提前预警的作用,具体比对识别流程如图2 所示。
2.2.1 人员识别
建筑工地人员众多,安全环境复杂,往往不能实时掌握施工现场的具体情况,通常只能通过人工巡检的方式进行检查识别,容易出现识别不及时和检查不全面的情况。通过在虚拟仿真模型中划分安全区与非安全区,设立电子围栏,按危险程度不同利用红色、黄色和绿色在模型中表示不同的区域,与预警提示等级的颜色相对应,形成可视化的仿真BIM 模型。利用传感设备(如电子身份标识、定位装置等)和高清摄像机实时记录施工人员的具体位置,通过图像算法识别出非正常许可进入危险区的人员,并在仿真BIM 模型中进行标注,当标注位置位于黄色和红色区域时,识别系统通过手持终端(如手机、平板等)进行提示预警,及时提醒施工人员注意安全,使管理人员及时掌握施工作业人员所处的施工环境安全状态,使其能够及时做出相应调整,保障施工作业人员时刻处于安全环境中。
2.2.2 架体识别
(1)架体失稳。确保脚手架的整体稳定是避免脚手架发生坍塌事故的有利保证,利用BIM 技术建立的仿真模型是脚手架稳定性的最优状态。第一,通过利用激光扫描仪将按标准建成后的脚手架立杆、横杆和整体进行定位扫描,通过扫描得到的立杆横杆位置图及脚手架整体结构图与脚手架标准仿真BIM 模型中相应位置进行一一比对,如图3 和图4 为脚手架局部和整体仿真BIM 模型,通过与仿真BIM模型比对得出各个立杆、横杆的位移偏差数值和架体的整体偏移值。第二,通过人工拍照和安装拉力、压力传感器的方式,分别作为脚手架固定点构件外表记录和固定点内部受力情况记录,将记录到的实际信息与脚手架仿真BIM 模型对应固定点处的预设标准值进行比对。收集数据的同时在仿真BIM 模拟中针对不同位置预设不同的允许偏差数值,以不同数值的偏差数据作为安全等级的划分标准,以此将脚手架的安全状态分为不同等级进行预警(如绿色预警(D1)、黄色预警(D2)和红色预警(D3))进行预警提示,针对不同的预警等级提供相应的对策建议,从而避免因脚手架失稳所引发的不安全行为发生,减少安全事故发生概率。
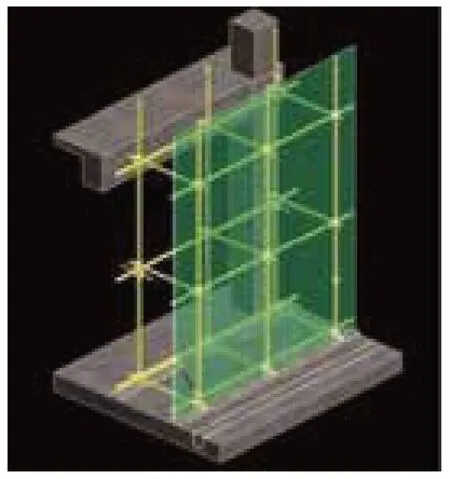
图3 脚手架局部BIM模型
(2)构件损坏。脚手架仿真模型能够形象的展示出各杆件及连接构建的具体标准模型,通过人工利用手持终端(如手机、平板等)对脚手架各个构件进行拍摄记录,将拍摄记录的实际脚手架构件与仿真BIM 模型构件库中对应的构件,进行形态改变、是否开裂、是否锈蚀和结构是否完整等细节比对,来鉴定构件的完整性、损坏程度和杆件非正常连接方式等,如图5 所示为比对脚手架仿真BIM 模型中架体搭设完整性,比对发现实际脚手架缺少扫地杆,可能影响架体稳定性。因此可以通过实际情况与虚拟仿真模型比对识别脚手架中的安全隐患,按易引发安全事故的大小,将脚手架不安全行为分为不同安全等级进行提示预警,能够起到对脚手架部构件的安全识别作用,避免因脚手架构架损坏或缺失引起的脚手架坍塌安全事故。

图5 脚手架固定点BIM模型与架体实拍
(3)荷载识别。脚手架工程的允许荷载是按照实际工程情况和现场所需计算后得出的,脚手架的允许荷载应满足《建筑施工扣件式钢管脚手架安全技术规范》JGJ-130-2011中的相关规定。通过在脚手架立杆底座和跨度较大横杆中段安装荷载感应装置(如压力应片等)记录脚手架受力情况,同时在脚手架标准仿真BIM 模型中相应构件和杆件处设置预设允许荷载数值等属性信息,通过比对采集数值和预设数值两组数据的大小,区分偏差值大小来识别架体的安全状态。将允许偏差数值大小按不同等级进行划分,即绿色预警(D1)、黄色预警(D2)和红色预警(D3),进行预警提示和措施建议提供,避免因荷载过大导致架体失稳坍塌,引发安全事故。
2.3 不安全行为比对识别的应用场景
引入BIM 技术建立的脚手架不安全行为比对识别能及时有效的识别脚手架中人的不安全行为和物的不安全状态,减少脚手架安全事故发生的概率。本研究可应用于脚手架搭设、使用和拆除全过程,识别脚手架局部和整体的实时状态,通过仿真BIM 模型可视化展示脚手架安全隐患和具体位置,为安全管理人员及时提供脚手架数据信息,便于查找脚手架安全隐患并进行整改,避免安全事故发生。
3.结论
目前,针对建筑脚手架不安全行为的研究较少,将BIM技术引入建筑脚手架不安全行为识别中能够一定程度解决人和物所引发的安全问题。本文通过专家访谈、文献阅读和问卷调查的方式收集分析建筑脚手架中的主要不安全行为和影响不安全行为的重要因素,通过人工采集和机器采集的方式实时、不间断采集建筑脚手架局部和整体的外部状态数据及内部受力数据,利用采集到的实时实际数据与脚手架标准模型预设值数据进行具体比对,从而识别出脚手架工程中的安全隐患和问题,最终识别出脚手架工程全周期内人和物所引发的不安全行为,提前避免安全事故的发生。以Revit 建立的仿真BIM 模型能够及时、准确比对识别出建筑脚手架中出现的不安全行为,减少脚手架中安全事故的发生,对BIM 技术今后的推广使用具有一定意义。今后,应进一步完善脚手架标准数据库的建设和数据库与仿真模型的交互功能实施,助力改善建筑脚手架的安全隐患问题,减少因建筑脚手架不安全行为引发的安全事故和人员的伤亡。
猜你喜欢
建材发展导向(2022年10期)2022-07-28 03:04:16
建材发展导向(2021年20期)2021-11-20 05:43:16
计算机仿真(2021年9期)2021-11-17 12:36:18
建筑施工(2021年3期)2021-08-06 02:21:50
建材发展导向(2021年6期)2021-06-09 05:57:02
煤炭科学技术(2021年3期)2021-05-14 03:56:36
今日农业(2019年12期)2019-08-13 00:50:02
现代园艺(2017年22期)2018-01-19 05:07:01
新课程研究(2016年2期)2016-12-01 05:53:17
火控雷达技术(2016年3期)2016-02-06 02:30:27
