丘陵山区果园植保机械设计与试验
2023-08-09 03:47黄玉芳杨光龙
耕作与栽培 2023年3期
黄 华, 黄玉芳, 杨光龙
(贵州农业职业学院, 贵阳 551400 )
我国是世界上最大的水果生产国和出口国[1],果树病虫害防治已成为决定果品产量和质量的关键因素之一[2],我国丘陵山区省份作为水果的主要产区,因地势特性(坡度大、地块小、埂和碎石较多)导致大型植保机械无法作业[3],而轻小型植保机械因研发难度大、推广难、利润低,导致国内丘陵山区植保技术落后,机械单一,农机农艺结合差[4]。因此,植保机械研发供给严重不足导致果园机械化率低成为制约水果产业提质增效的主要瓶颈[5]。
为改善果园植保作业条件,提升我国丘陵山区果园机械化水平成为业内共识[6]。近年来,针对丘陵山地的植保机械研制和应用取得了一定的成效,植保无人机是果园病虫害防治减少的有效途径之一,因其不受地形限制[7],喷药效果好而广泛应用于丘陵山地果品生产,但其存在携药量少和对操作者技术要求高等不足;悬挂式果园喷雾机[8]也是针对丘陵山区而设计,必须和拖拉机配套使用,然而燃油动力对环境有污染,丘陵山区地块小作业调头难,也有对施药者造成人身伤害的风险。
本文以丘陵山区的典型代表贵州省为植保机械研制的调研基础,对玉屏、剑河、修文等地黄桃、杨梅、猕猴桃等水果栽植基地的病虫害防治技术和设备现状开展深入田野调查,针对丘陵山区果园现有植保机械存在的凹凸地面适应性不足、小地块灵活性差、坡度大制动性不够、燃油排放污染环境等问题,研制了一种基于机电一体化技术和智能控制的遥控式果园植保机械。该设备设计合理,操作简单,续航能力可达10 h以上,药箱容积200 L,作业爬坡0°~45°,行走速度0~4.2 km/h,遥控距离1 000 m以内,并获得良好的田间试验反馈。
1 植保机械研制
1.1 整体设计与工作原理
通过实地调研贵州省玉屏、剑河、修文等县黄桃、杨梅、猕猴桃等水果栽植基地病虫害防治现状,找准丘陵山区果园植保机械存在的短板和不足,针对丘陵山区凹凸地面适应性不足、小地块灵活性差、坡度大制动性不够、燃油排放污染环境等问题[9],设计适宜于丘陵山区特性的植保机械,整机结构图如图1所示,底盘离地约0.273 m,外形尺寸长宽高分别为:1.579 m×1.474 m×1.253 m。
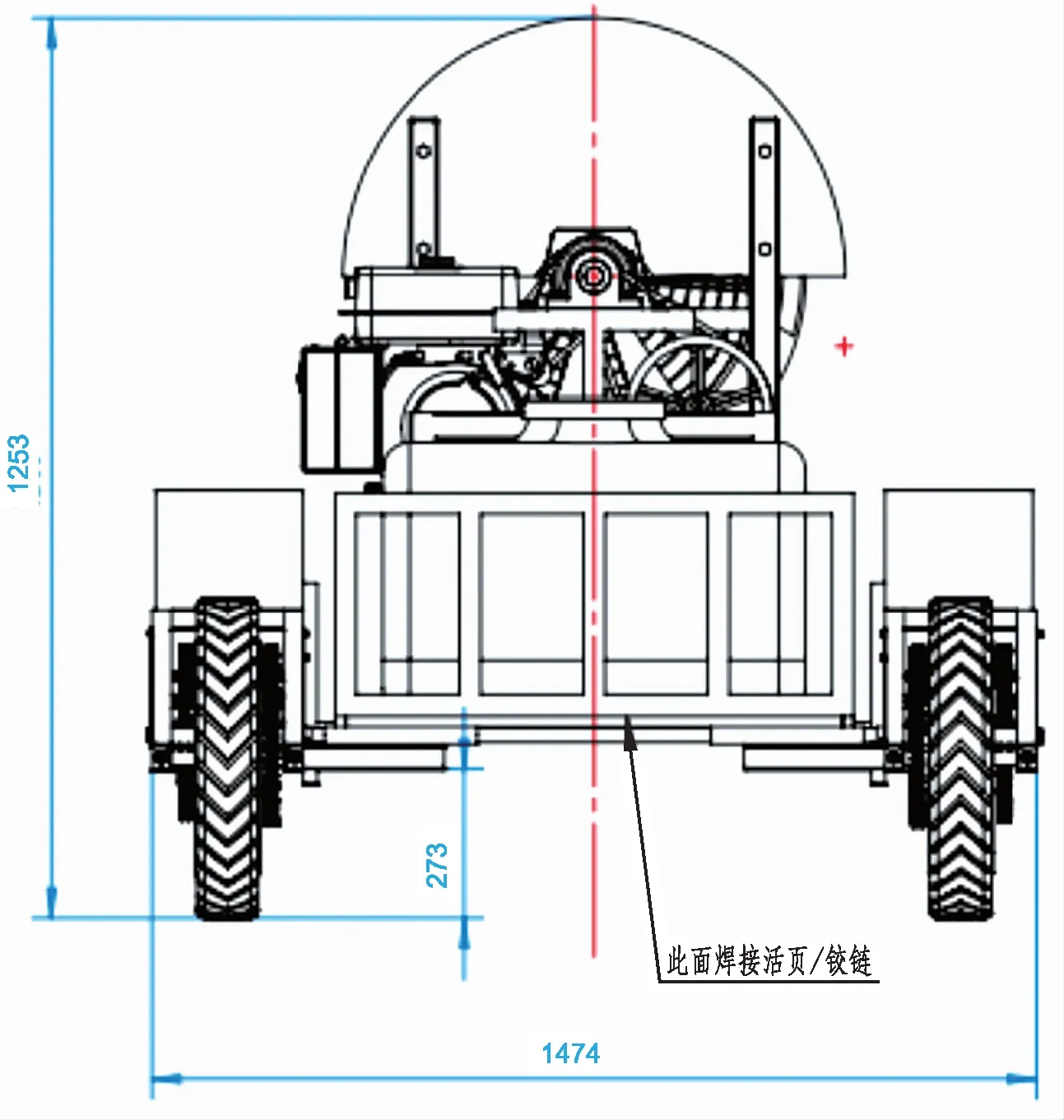
图1 整车结构设计示意图
植保机械由行走系统、喷雾装置、农药箱以及无线控制设备等组成[10]。无线控制设备主要包含人机交互模块、位姿解算模块、电机驱动模块和无线通讯模块,其中无线通讯模块发出的控制指令通过人机交互模块对其控制信号进行位姿解算,控制信号经过信号通道驱动行走系统和喷雾系统,以完成行走和喷雾植保动作。
1.2 主要部件设计
1.2.1动力蓄电池
针对果园燃油植保机不仅污染环境,而且影响果品品质,零污染无排放的植保机械是未来植保机的发展方向,所研制的植保机采用2组磷酸铁锂电池,电池参数如表1所示,续航能力可达10 h,有效保障植保机械具有较长作业时间。

表1 磷酸铁锂电池参数
1.2.2无刷电机
行走系统车身[11]两端配备2个功率为1 500 W的无刷电机驱动轮毂,以改变植保机作业位置,电机主要参数如表2所示。此外,采用变速器和电机组合装置设计制动装置,植保机在失控的情况下,可以利用变速器和电机的组合装置进行自动制动,防止车辆在失控的情况下继续行驶,起到保护操作人员、机器以及药液的作用。

表2 电机参数
1.2.3无线遥控设备
农药形成的喷雾对施药者有不同程度的伤害,因此选择无线遥控器作为植保机械行走和喷药作业的控制设备。所选用的控制设备主要性能参数如表3所示,数据可双向传输,电容触摸屏便于操作,10通道为多类型作业姿态提供可能,电压低于4.2 V时可实现低压报警[12]。

表3 无线遥控器设备参数
1.2.4涡轮螺杆减速器和车架行走系统
无人化和自动化是未来植保机械发展方向[13],为了契合丘陵山地高低不平和凹凸地势,需要对植保机械的刹车稳定性、凹凸不平地势的适应性进行结构设计。因此,植保机采用涡轮蜗杆减速器以实现机械制动,蜗杆传动的摩擦特性和自锁性能导出自锁条件下可精准制动,在45°以内的坡度范围内,保证植保机械稳定性,不会出现冲坡自行下滑现象。行走系统的左右车架分开,可根据地势进行姿态的自动调整,有效适应凹凸地面,车架行走系统结构设计如图2。
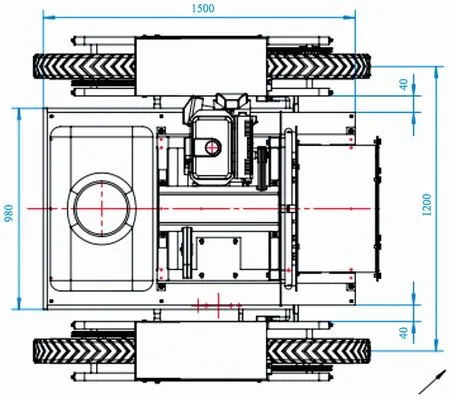
图2 车架行走系统结构设计
1.2.5喷药系统
喷药系统采用风送式喷雾机[14],单缸汽油机动力通过皮带轮传递给风机和增压泵,药箱里的药液从输出管道先受到压力泵的增压后再流到风机,风机旋转惯性力将药液从喷头甩出,喷药系统设计如图3。
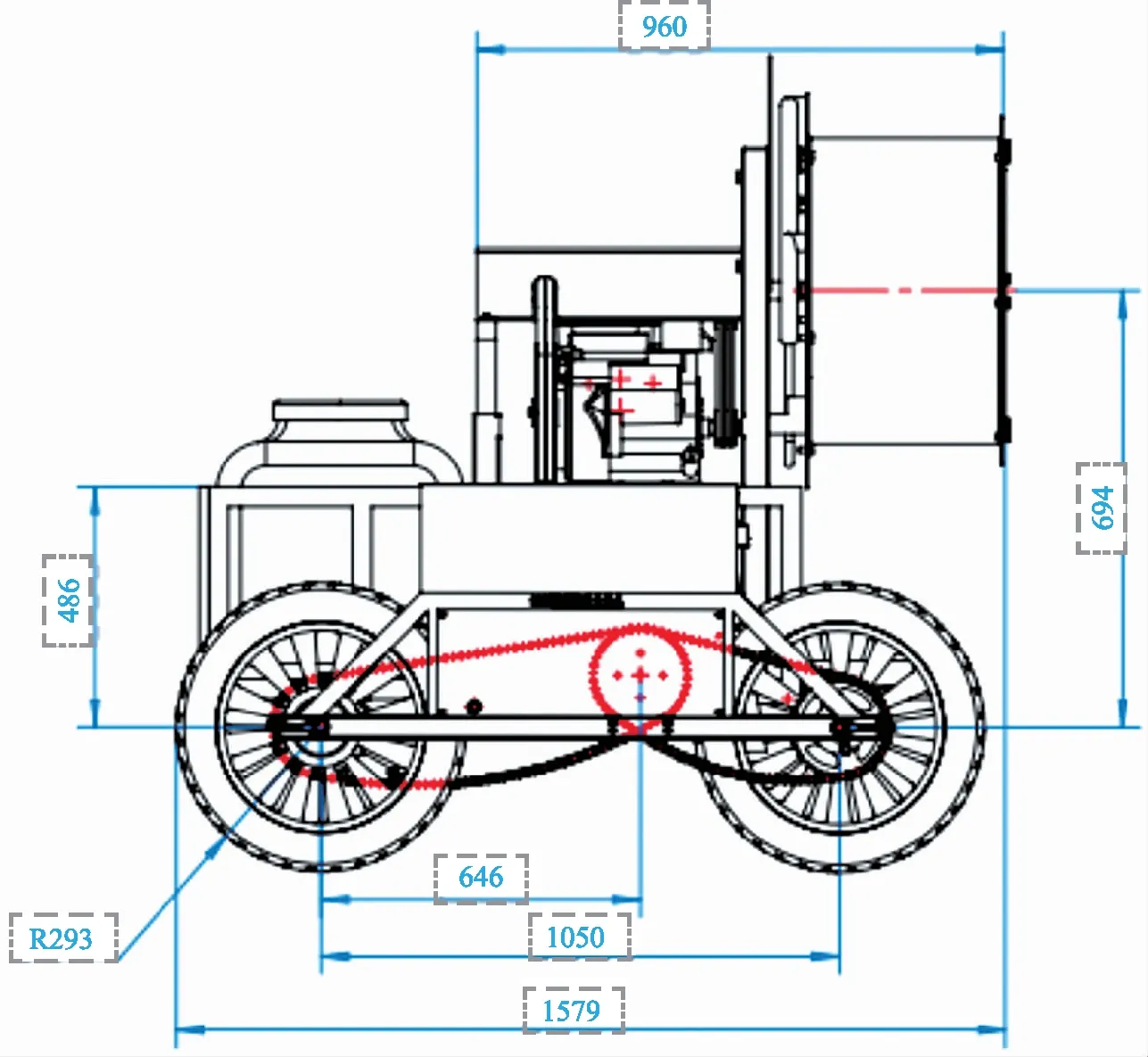
图3 喷药系统设计
2 样机试验与结果
2.1 试验方法与步骤
1) 试验方法:模拟丘陵地区果园栽植环境,分别选取坡度为10°,20°,30°的三段试验坡,坡道上设置高约0.25 m的障碍物,准备一台植保机械作业模拟试验,所研制的果园植保机械测试见图4。

图4 植保机械作业效果水准仪测量图
2) 试验步骤
①用水准仪、卷尺测量坡道坡度,将植保机分别置于接近于10°,20°,30°的坡道上,开启电源开关。
②用转速表调节植保机行走速度(0~4.2 km/h),通过调节压力泵压力值来控制植保机喷药量(1 000 kPa),让植保机沿着斜坡从低向高行走。
③观察植保机的喷药均匀性、雾化效果、喷洒高度、漏药情况、底盘通过性表现,对各试验效果进行评分。
④试验中根据实际情况调整行走速度及高压泵压力值以达到最佳喷药效果。
2.2 试验结果
试验采用正交试验测试样机性能,根据试验要求和生产实际情况,遵循少选因素和水平的一般原则[15],经全面分析试验选取A行走速度(m/min)和高压泵压力值(kPa)两个因子,每个因子设三个水平。正交表第三、四列极差较大者所在列为A、B因子的交互作用列,剩余列作空列误差,因子水平表见表4所示。
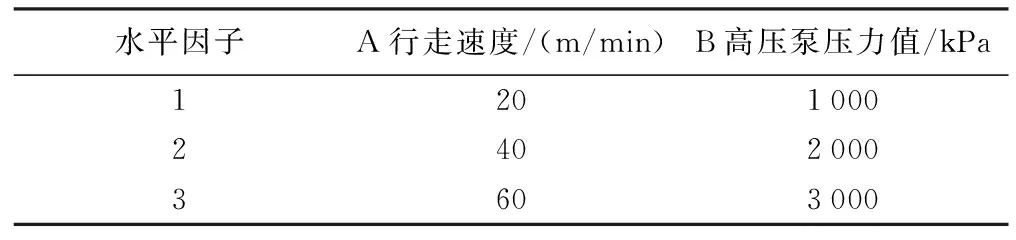
表4 植保机工作因子水平
本试验观察指标有坡度、通过性、稳定性、刚性、续航能力等,如表5所示。植保作业效果评分如表6所示,各性能指标满分均为10分,得分越高,则各性能表现越好。

表5 植保车作业观测指标及权重
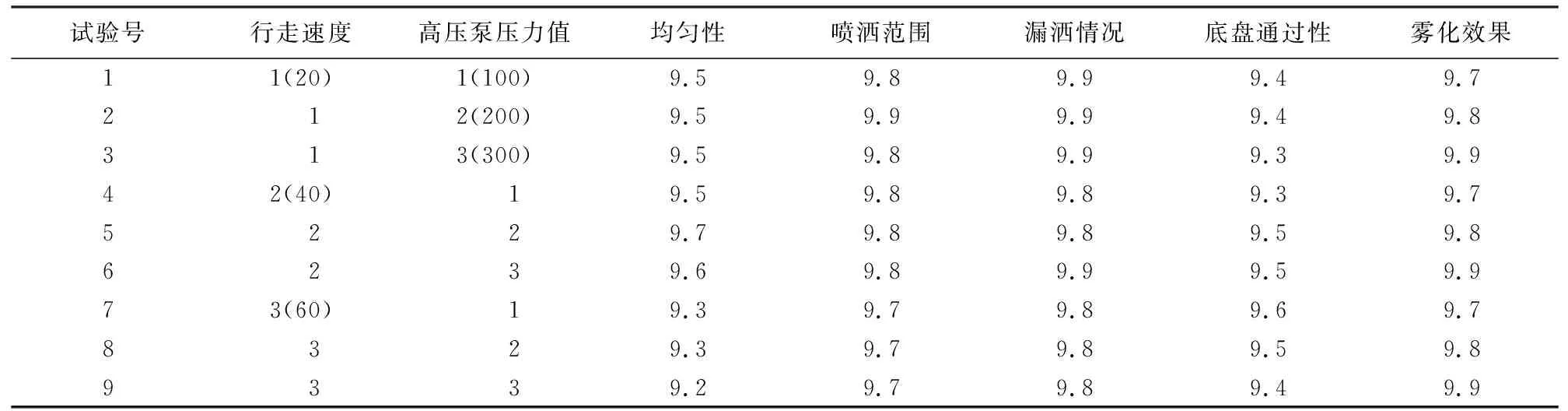
表6 植保作业效果评分
3 结 论
植保机械行走部分采用新能源纯电动动力源,实现绿色零排放无污染,行走系统采用四轮驱动,工作时利用遥控器加接收器完成编程,无级调速控制电机驱动,可实现1 000 m以内摇动控制左右2个电动差速行走和转向功能,最高时速可达4.2 km/h,因采用涡轮螺杆减速器,在0°~45°坡道上能实现自锁,即上坡不后退,下坡不前冲,失控或断电情况能立即停止,保证植保机安全作业。
田间试验表明,果园植保机械行走平稳,控制精准,凹凸地块适应性较高,具有差速原地调头转向特性,涡轮螺杆机械自动制动特点,病虫害防治喷药效果佳等优势,适宜于丘陵山区果园病虫害防治。
猜你喜欢
信息记录材料(2022年3期)2022-05-17
广西植保(2021年4期)2022-01-06
今日农业(2021年17期)2021-11-26
今日农业(2021年13期)2021-11-26
今日农业(2020年18期)2020-12-14
电子测试(2018年23期)2018-12-29
新农业(2017年2期)2017-11-06
散文诗(2017年22期)2017-06-09
新农业(2016年22期)2016-08-16
中国农业文摘-农业工程(2016年5期)2016-04-12