
基于电流预测及谐波抑制的双三相永磁同步电动机容错控制研究
2023-08-08 06:54:08刘伟刘磊
电气技术 2023年7期
刘 伟 刘 磊
基于电流预测及谐波抑制的双三相永磁同步电动机容错控制研究
刘 伟 刘 磊
(东北石油大学电气信息工程学院,黑龙江 大庆 163318)
针对传统的比例积分(PI)控制器在双三相永磁同步电动机(DTP-PMSM)容错控制系统中存在响应速度慢及谐波电流大的问题,本文提出一种基于电流预测及谐波抑制的DTP- PMSM容错控制策略,通过对一相绕组故障后的DTP-PMSM进行建模,然后对电压方程进行二次解耦变换,在基波子平面的电流环中引入无差拍控制器以提高系统的动态响应速度,同时在谐波子空间引入比例谐振(PR)控制,抑制谐波电流对电动机运行的影响。通过仿真结果对比表明,所研究的容错控制策略能使电动机在单相断相后保持稳定运行,且相较于传统PI控制器,在动态响应速度及谐波抑制方面具有一定优化效果。
双三相永磁同步电动机;容错控制;无差拍电流预测控制;PR控制器
0 引言
与传统三相电动机相比,双三相永磁同步电动机(dual three-phase permanent magnet synchronous motor, DTP-PMSM)在容错能力方面具有更强的优势[1-3]。DTP-PMSM在三相电动机的基础上多一套绕组,当其中某相绕组或多相绕组故障时,对剩余相进行合理控制,能够使电动机继续保持正常运行,有效提高了电动机运行的可靠性和安全性[4],所以研究电动机的容错运行具有重要意义[5]。目前,对于多相电动机的容错控制主要分为两类:一类是直接控制故障后电动机中的定子电流,保持磁动势不变,无需建立故障后的电动机模型;另一类是基于矢量空间解耦思想,重新建立绕组开路后的电动机模型,再进行解耦矢量控制[6]。文献[7]考虑在缺相容错控制时,分析漏感和谐波对电动机转矩脉动的影响,通过补偿的方式减小五次空间谐波的影响。文献[8]对一相绕组开路故障时,将DTP-PMSM转化为三相PMSM和单相PMSM的组合,并提出建立dq坐标系和静止坐标系融合系统的动态数学模型。文献[9]分别考虑电动机输出功率恒定和旋转磁动势不变作为断相故障后的两个原则,实现了电流滞环的容错控制方案。文献[10]通过矢量空间变换获得DTP-PMSM在dq坐标系的数学模型,并以此为基础提出定子铜耗最小的容错控制策略。文献[11]对比分析电动机在不同容错控制方式下的容错运行性能,引入权重系数,达到平衡定子铜耗与转子输出的能力。文献[12]提出忽略电压约束是导致电流波形畸变和电压脉动的原因,进而对电压约束进行补偿,优化电动机容错运行的性能。上述控制策略的电流内环均采用传统的比例积分(proportional integral, PI)控制器[13],使系统的动态响应速度慢,且未考虑谐波电流的影响,无法满足低电压、大功率、高可靠性的应用场合。
综上所述,本文在基于传统PI控制器的DTP- PMSM容错控制策略的基础上,综合考虑DTP- PMSM控制系统在一相断相后的动态响应能力和谐波抑制能力,提出在基波平面引入无差拍控制器用于提高系统动态响应能力,在谐波平面引入比例谐振(proportional resonant, PR)控制器用于抑制谐波电流,并利用仿真试验分析该控制策略的有效性。
1 基于降维数学模型的DTP-PMSM容错控制
1.1 断相故障下的DTP-PMSM在自然坐标系下的数学模型
DTP-PMSM一般采用两套绕组中性点隔离的运行方式,这种方式能够有效抑制零序电流[14]。本文所研究的DTP-PMSM是两套绕组(A-B-C和D-E- F)之间相移30°的多相电动机。双Y相移30°中性点隔离的DTP-PMSM拓扑如图1所示。
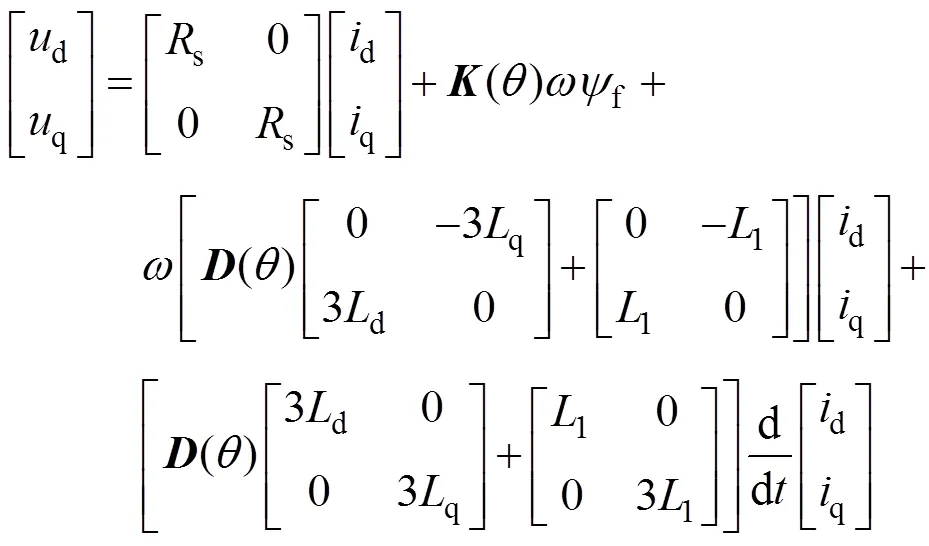
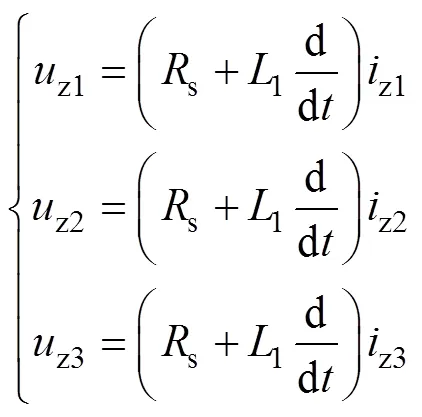
当第二套绕组中F相故障时,即图1中点画线框所示F相断相时,可以得到剩余五相的电压与磁链方程为

图1 双Y相移30°中性点隔离的DTP-PMSM拓扑
(2)
式中,为转子电角度。
1.2 降维坐标矩阵的确定

则总的降维变换矩阵为
式中,5s/2s和2s/2r均为坐标变换矩阵。
1.3 断相故障后的电动机降维数学模型
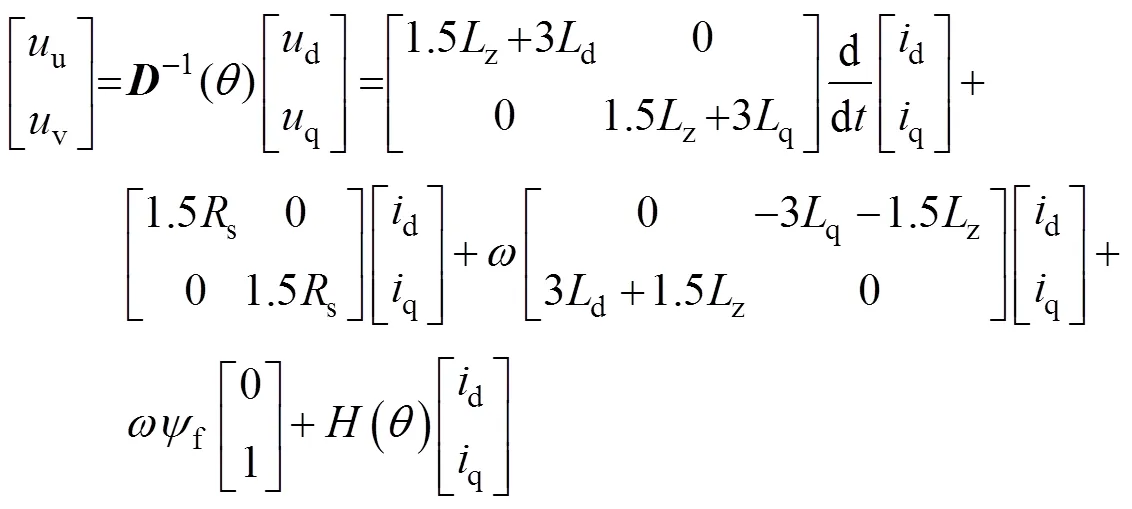
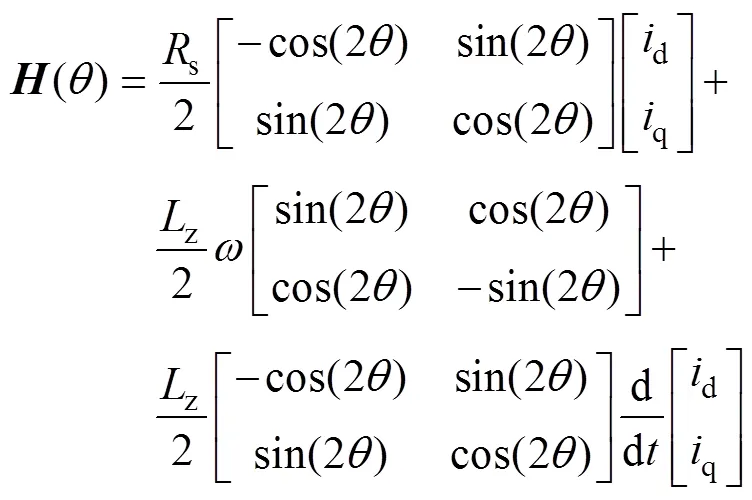
将式(4)代入式(1)可得

1.4 基于二次解耦变换的容错控制

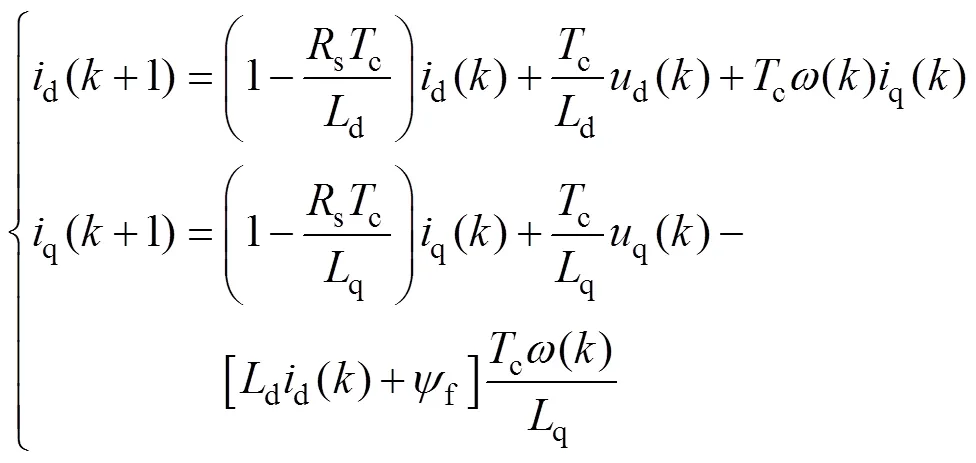
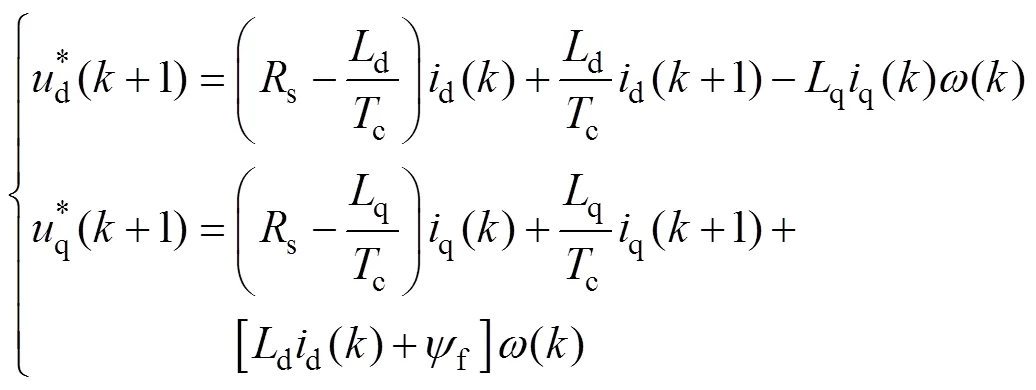
2 无差拍电流预测控制及谐波抑制策略



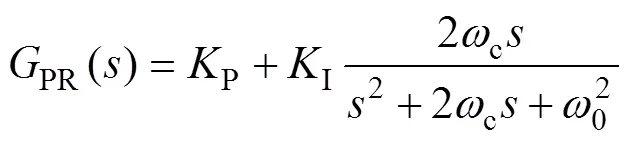
为了抑制谐波平面中谐波电流对系统运行的影响,引入准PR控制器代替PI控制器,其传递函 数为
基于电流预测及谐波抑制的DTP-PMSM容错控制策略如图2所示。与传统的PI矢量控制相比,基波平面电流内环改为无差拍电流预测控制,谐波平面电流环改为PR控制。
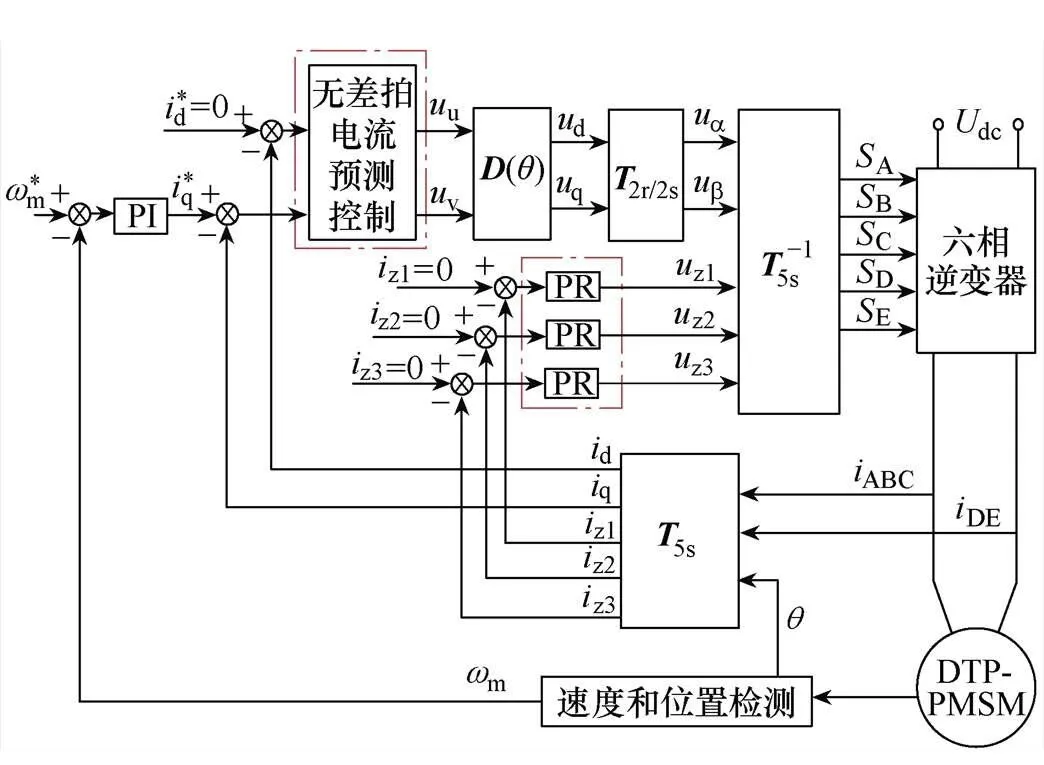
图2 基于电流预测及谐波抑制的DTP-PMSM容错控制策略
3 仿真结果分析
为了对本文所提方法的可行性与正确性进行分析,在Matlab/Simulink平台中,搭建以F相绕组故障为基础的DTP-PMSM容错控制仿真模型。电动机参数见表1。
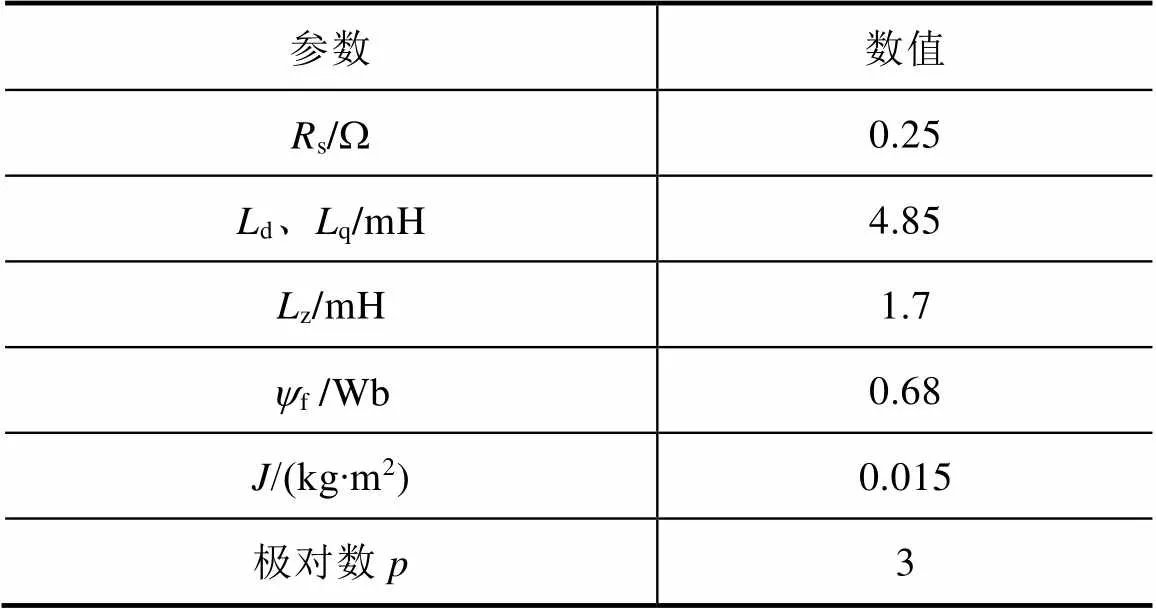
表1 电动机参数

图3为两种控制方法对应的转速仿真波形,图3(a)为方法一对应的转速波形,图3(b)为本文方法对应的转速波形。由图3可以看出,相较于方法一,本文方法使电动机转速在整个运行过程中都能保持较好的平滑度,波动较小,因此本文方法具有更加优异的控制性能。
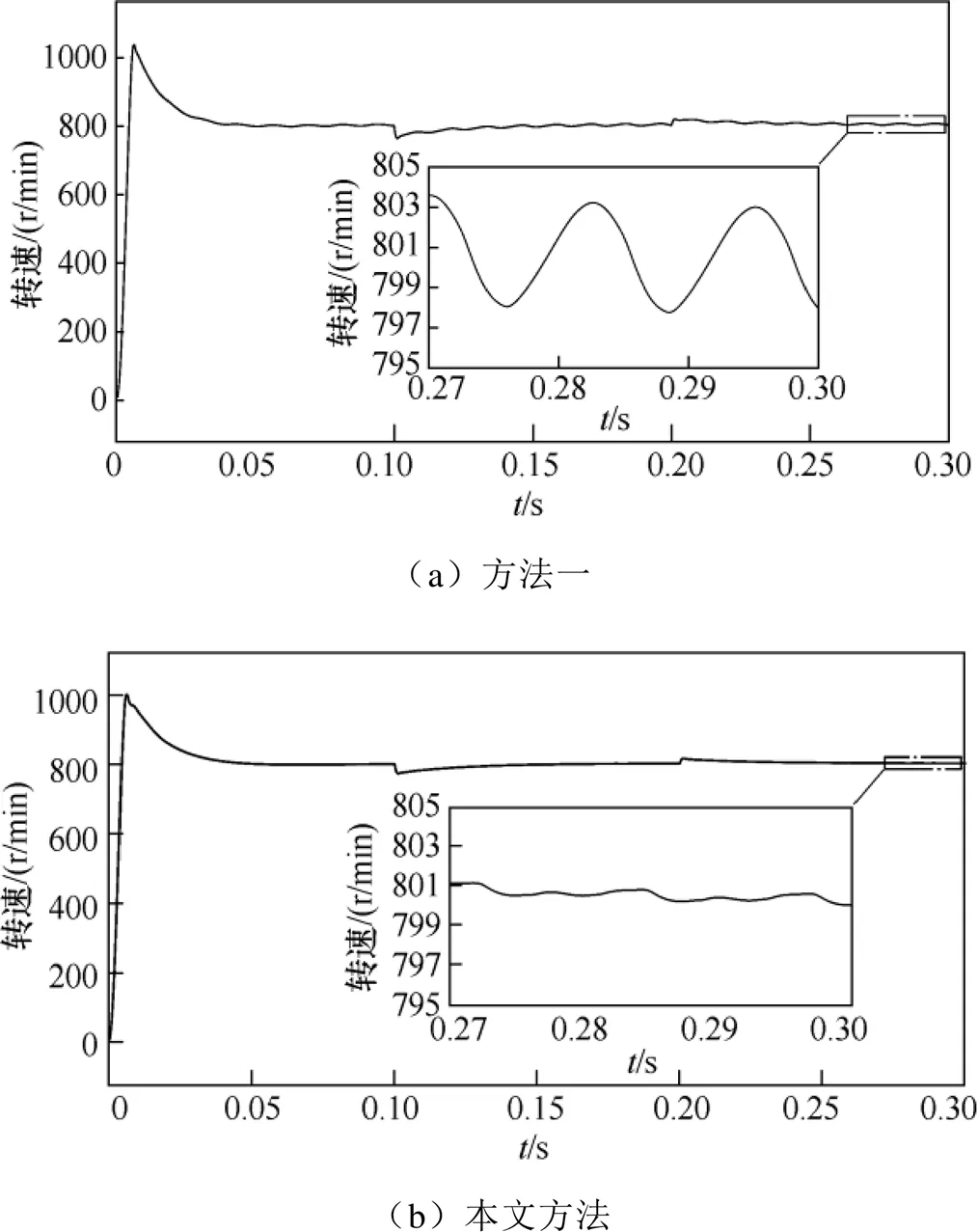
图3 两种控制方法对应的转速仿真波形
图4为两种控制方法对应的F相断相后剩余五相定子电流仿真波形,图4(a)为方法一对应的定子电流波形,图4(b)为本文方法对应的定子电流波形。由图4可以看出,在电动机空载起动到0.1s之间,方法一对应的定子电流一直处于波动状态,没有稳定到零,本文方法对应的定子电流约在0.03s时趋于零,具有更小的电流波动。在0.1s加载时,两种方法都能保持较好的正弦度,在0.2s减载时,方法一对应的五相定子电流发生了一定畸变,无法输出稳定的正弦波形,而本文方法能够使剩余五相定子电流变化幅度较小,保持更好的正弦性。
图5为两种控制方法对应的电磁转矩仿真波形,图5(a)为方法一对应的电磁转矩波形,图5(b)为本文方法对应的电磁转矩波形。由图5可以看出,转矩稳定后,方法一对应的转矩波动约为4N·m,本文方法对应的转矩波动约为2N·m,电动机运行过程中,本文方法都能保持较低的转矩脉动,具有更快的动态响应能力。
图6为在谐波子空间分别使用PI控制和PR控制方法对应的A相电流傅里叶分解波形,图6(a)为谐波子空间采用PI控制时的傅里叶分析结果,此时总谐波失真为11.66%,图6(b)为谐波子空间采用PR控制时的傅里叶分析结果,此时总谐波失真为6.73%。由此可知,采用PR控制使总谐波失真减小了4.93%,降低了谐波电流的影响。

图5 两种控制方法对应的电磁转矩仿真波形
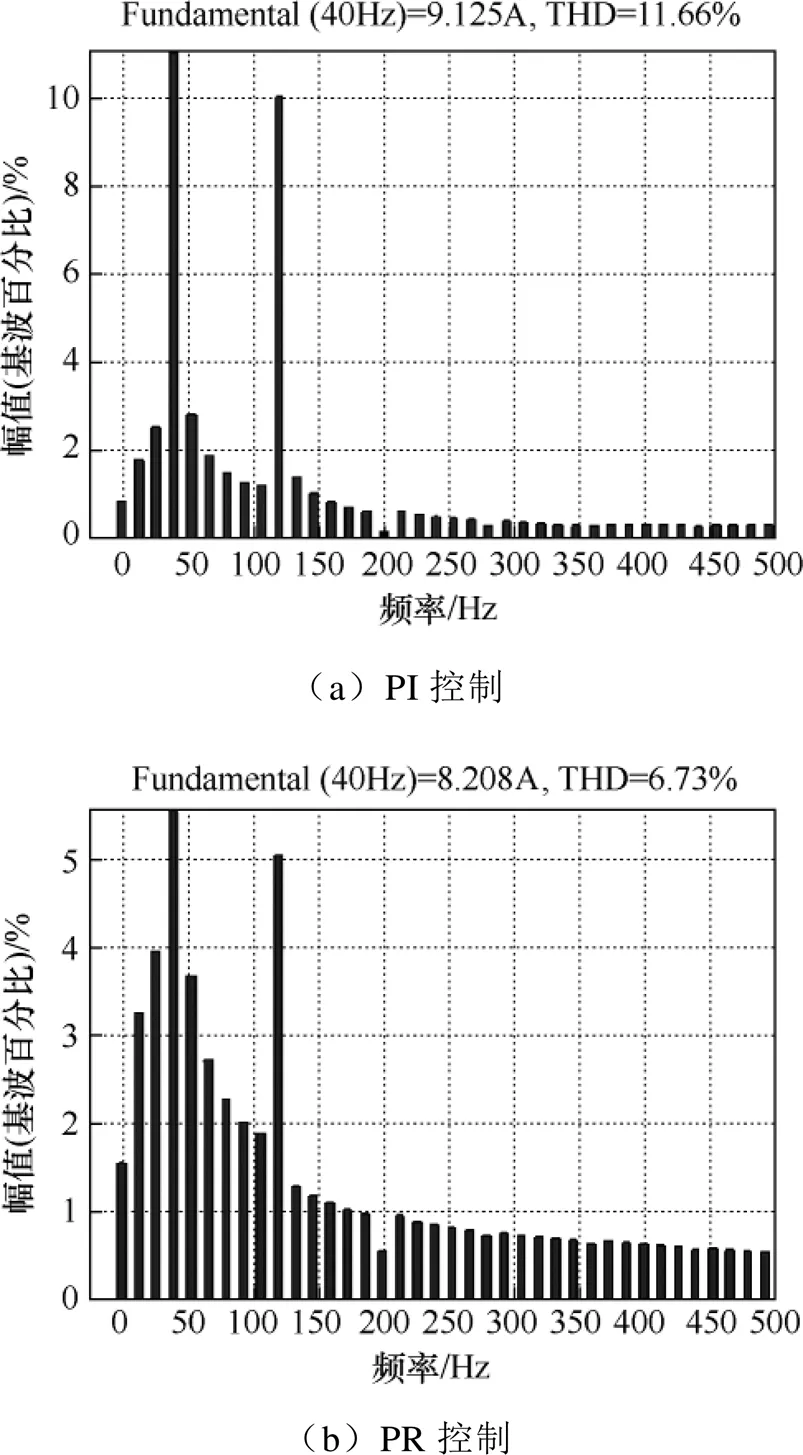
图6 PI控制和PR控制对应的A相电流傅里叶分解波形
4 结论
为解决传统PI控制器在容错控制系统中的响应速度和谐波问题,本文提出了一种基于电流预测及谐波抑制的DTP-PMSM容错控制算法,在基波平面引入无差拍控制器,在谐波平面引入PR控制器,并进行了整体仿真模型的搭建。仿真结果表明,所提出的容错控制方法可以使电动机在断相后保持稳定运行,且比传统的PI控制具有更高的动态响应能力和更好的谐波抑制效果。
[1] 杨金波, 李铁才, 杨贵杰. 一相开路双三相永磁同步电机建模与控制[J]. 电工技术学报, 2011, 26(10): 167-173, 187.
[2] 宋战锋, 毛丰羽, 崔严谨, 等. 参考跟踪和扰动抑制解耦的双三相永磁同步电机容错控制策略[J]. 电工技术学报, 2023, 38(2): 435-450.
[3] 周长攀, 刘海峰, 景国秀, 等. 双三相永磁同步电机缺相容错运行虚拟矢量间接修正方法及其在直接转矩控制中应用[J]. 电工技术学报, 2023, 38(2): 451- 464.
[4] 黄其, 陈翔, 罗玲, 等. 电动汽车用永磁同步电机控制器设计[J]. 电机与控制应用, 2019, 46(10): 84-91.
[5] LIN F J, HUNG Y C, HWANG J C, et al. Fault-tolerant control of a six-phase motor drive system using a Takagi-Sugeno-Kang type fuzzy neural network with asymmetric membership function[J]. IEEE Transa- ctions on Power Electronics, 2013, 28(7): 3557-3572.
[6] WANG Xueqing, WANG Zheng, HE Mingzhi, et al. Fault-tolerant control of dual three-phase PMSM drives with minimized copper loss[J]. IEEE Transa- ctions on Power Electronics, 2021, 36(11): 12938- 12953.
[7] 高闯, 赵文祥, 吉敬华, 等. 低谐波双三相永磁同步电机及其容错控制[J]. 电工技术学报, 2017, 32(增刊1): 124-130.
[8] 王海兵, 赵荣祥, 汤胜清, 等. 一相开路时双三相永磁同步电机简化容错控制策略[J]. 电力自动化设备, 2018, 8(1): 74-79.
[9] 杨宗龙. 双三相永磁同步电机容错控制策略研究[D]. 哈尔滨: 哈尔滨工业大学, 2018.
[10] 郑冬霞, 刘咏萱. 绕组开路故障下的双三相永磁同步电机容错控制[J]. 电机与控制应用, 2020, 47(5): 28-32, 38.
[11] 张建亚, 王凯, 郭玲玲, 等. 基于最小铜耗和最大转矩的双三相永磁电机单相缺相折衷容错控制[J]. 飞控与探测, 2022, 5(1): 67-74.
[12] 郑博元, 李炳均, 徐永向, 等. 考虑电压约束时双三相永磁同步电机一相开路的建模与容错控制策略[J]. 中国电机工程学报, 2023, 43(1): 294-304.
[13] 刘伟, 王俊. 永磁同步电机参数辨识研究综述[J]. 电气技术, 2020, 21(8): 1-5, 135.
[14] 周长攀, 杨贵杰, 苏健勇. 五桥臂逆变器驱动双三相永磁同步电机系统双零序电压注入PWM策略[J]. 中国电机工程学报, 2016, 36(18): 5043-5052.
[15] 张威威. 双三相永磁同步电机高品质控制技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2021.
[16] 柯伟煌, 钱胜南, 张艺, 等. 基于扰动观测器的永磁同步电动机无差拍电流预测控制仿真[J]. 电气技术, 2019, 20(8): 1-5.
Research on fault-tolerant control of dual three-phase permanent magnet synchronous motor based on current prediction and harmonic suppression
LIU Wei LIU Lei
(School of Electrical & Information Engineering, Northeast Petroleum University, Daqing, Heilongjiang 163318)
For the traditional proportional integral (PI) controller, there are problems of slow response speed and large harmonic current in the fault-tolerant control system of dual three-phase permanent magnet synchronous motor (DTP-PMSM). This paper proposes a DTP-PMSM fault-tolerant control strategy based on current prediction and harmonic suppression, and models the DTP-PMSM after the fault of one phase winding. Then, the voltage equation is decoupled twice, and a beatless controller is introduced in the current loop of the fundamental subplane to improve the dynamic response speed of the system. The proportional resonance (PR) control is introduced in the harmonic subspace to suppress the influence of harmonic current on motor operation. The fault-tolerant control strategy can keep the motor running stably after phase failure, and has a certain optimization effect in dynamic response speed and harmonic suppression compared with traditional PI controllers.
dual three-phase permanent magnet synchronous motor; fault-tolerant control strategy; no differential current prediction control; PR controller
国家自然科学基金项目(N11372071)
2023-04-02
2023-05-04
刘 伟(1971—),男,黑龙江省大庆市人,教授,博士生导师,主要从事电力系统与智能控制、电机运行与智能控制的研究工作。
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
光学精密工程(2016年3期)2016-11-07 09:03:49
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年12期)2015-04-09 11:44:44
大电机技术(2015年5期)2015-02-27 08:22:28
电测与仪表(2014年14期)2014-04-04 11:53:30
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
汽车电器(2014年8期)2014-02-28 12:14:29
