蒙古韭收割机设计与试验
2023-08-04 16:16刘娜张健飞金海榕佟文玉田素博宁晓峰
中国农机化学报 2023年7期
刘娜 张健飞 金海榕 佟文玉 田素博 宁晓峰
摘要:针对蒙古韭收获作业人工成本高,没有专业收割机械等问题,设计自动有序蒙古韭收割机,一次性完成收割、有序输送及装箱作业,提高收获作业效率和蒙古韭的新鲜度。在分析蒙古韭收割机总体结构的基础上阐述整机的工作原理,对切割装置、扶持装置、输送装置等关键部件进行设计校核后完成样机试制。以有效收割率和割茬整齐率作为评价指标进行田间收割试验,试验表明,当机器前进速度为3km/h,有效收割率和割茬整齐率达到最高值,分别为98.4%、96.2%,当割茬高度为2.5cm时,有效收割率和割茬整齐率为98.3%、95.9%,该蒙古韭收割机满足蒙古韭收割作业要求。
关键词:蒙古韭收割机;扶持装置;输送装置;收割试验
中图分类号:S233.4
文献标识码:A
文章编号:20955553 (2023) 070033
07
Design and experiment on Allium mongolicum Regel harvester
Liu Na1, Zhang Jianfei2, Jin Hairong1, Tong Wenyu1,Tian Subo1, 3, Ning Xiaofeng1, 3
(1. College of Engineering, Shenyang Agricultural University, Shenyang, 100866, China; 2. Nanjing Institute of
Agricultural Mechanization, Ministry of Agriculture and Rural Affairs, Nanjing, 210014, China; 3. Key Laboratory of
Horticultural Equipment, Ministry of Agriculture and Rural Affairs, Shenyang, 100866, China)
Abstract: Allium mongolicum Regel has high nutritional value and ecological value. In response to the high labor cost and lack of specialized harvesters for Allium mongolicum Regel, an automated and orderly harvester was designed to complete the harvesting, orderly transportation, and packing operations, aiming to improve the harvesting efficiency and freshness of Allium mongolicum Regel. Based on the analysis of the overall structure of the harvester, the working principle of the whole machine was described. The design of the cutting device, supporting device, conveying device, and other key components were illustrated, and the drive control system of the whole machine was designed. Field harvesting tests were conducted using the effective harvesting rate and stubble trim rate as evaluation criteria to assess the machines operational performance. The results showed that when the machine speed was 3km/h, the effective rate of harvest and stubble trim reached their highest values of 98.4% and 96.2%, respectively. When the stubble height was 2.5cm, the effective harvesting rate and stubble trim rate were 98.3% and 95.9%, respectively. These findings verified that the Allium mongolicum Regel harvester design satisfies the requirement of Allium mongolicum Regel harvesting operations.
Keywords: Allium mongolicum Regel harvester; support the device; delivery mechanism; harvesting test
0 引言
蒙古韭(Allium mongolicum Regel)属百合科(Liliaceae)葱属(Alliaceae)植物,又名沙葱,属于叶菜类,蒙古韭具有极高的营养价值和生态价值[1]。近年来,随着人民生活质量的提高,很多人开始注重绿色健康的饮食,蒙古韭越来越受到广大消费者的青睐[2],天然生长的蒙古韭数量已经满足不了人们的需求,开始掀起人工种植蒙古韭的热潮。而对于蒙古韭收获,目前市场上还未有专门的收割装置,普遍采用人工收获方式。一方面由于蒙古韭属于小宗蔬菜,种植面积相对小,相关作业机械研究较少,更没有成型实用的收获机械;另一方面由于蒙古韭一部分为天然野生,一部分现在人工种植,种植农艺没有规范,农艺不能满足机械化作业[1]。目前市场上主要的叶菜收割机械有欧洲SLIDE FW SMALL小型温室叶菜收获机。此外,Nang等[35]设计一款往复式切割式叶菜收割机,可以同时切割多排叶菜,但机器都为无序式收割;伍渊远等[67]提出了一种利用机器视觉技術获取叶菜收获机,但成本高、耗时长。我国蔬菜收获机械化程度不高,自动化程度低,产品质量不稳定,品种单一,市场上的叶菜收割机不适合蒙古韭收割。因此本文针对蒙古韭的种植农艺和物理特性,设计自动有序蒙古韭收割机,从理论上分析收割机关键部件的结构参数并进行相关校核,同时进行样机试制和田间试验,验证机器性能。
1 总体方案设计
1.1 蒙古韭的压缩特性分析
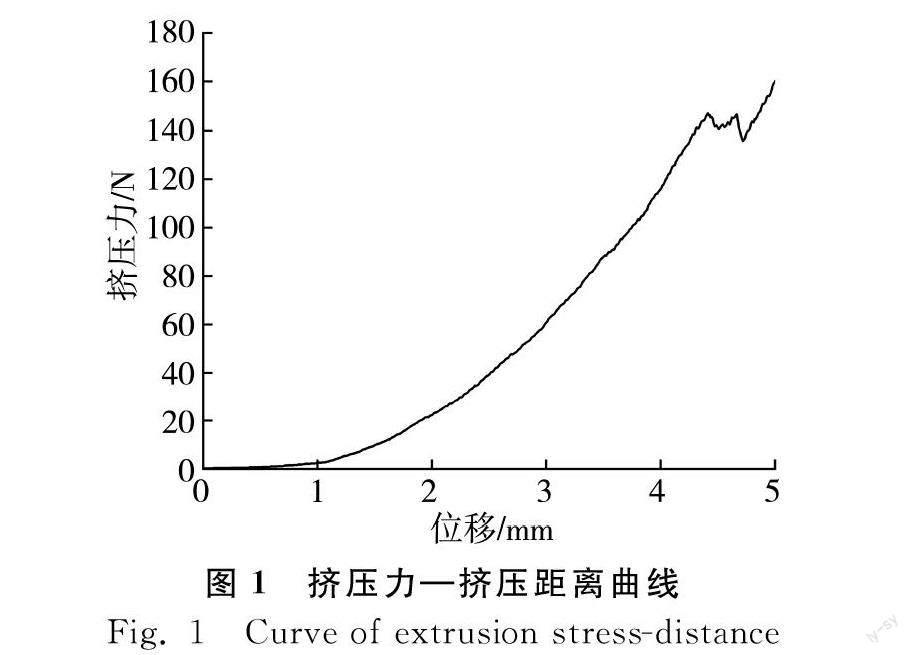
蒙古韭在经一级夹持输送带输送过程中,为避免蒙古韭被夹持输送带挤压破损,影响蒙古韭的品质,因此对蒙古韭叶片进行径向压缩力学特性试验,并且根据试验结果确定一级输送带的安装位置及角度。本试验所用的仪器为美国FTC-质构仪TMS-PRO,本研究所用的试验样品为中国科学院东北地理与农业生态研究所蒙古韭种植基地的蒙古韭,采用静态测量法,设定加载速度为20mm/min对试样施加压力,直至蒙古韭试样破损,试验结束。每组试验20个样本,并对其进行编号[810]。试验结果如图1所示。
1.2 整机结构
蒙古韭收割机主要包括扶持装置、输送装置、切割装置、收集装置和驱动控制部分,如图2所示。工作时,电机同时为扶持装置和输送装置提供动力,两个扶持器向相反的、朝外侧旋转,起到扶持蒙古韭的作用,由割刀电机直接驱动的圆盘回转式割刀将蒙古韭从叶片分叉处割断,割断后的蒙古韭倾倒顺着一级夹持输送带向后方输送,由于一级输送带是由竖直传动扭转为水平传动,因此蒙古韭也会由竖直状态变为水平状态,利于收割后的蒙古韭的整齐摆放,蒙古韭随一级夹持输送带输送至二级输送带,进一步通过二级输送带将蒙古韭输送至收集箱内,落入收集箱的蒙古韭通过后拨装置拨进收集箱末端,防止蒙古韭堆积,适时卸出,一次性完成蒙古韭收割、有序传送及装箱作业。
蒙古韭收割机主要技术参数如表1所示。
2 关键部件设计
2.1 扶持装置设计
扶持装置(图3)由后辊、轴承、软轴、扶持器、传动带,保护罩等组成。
由输送装置电机提供动力,电机工作通过链轮链条传动带动后辊转动,后辊通过传动带与固定在车架底部的驱动滑轮相连,驱动滑轮两侧的轴承两端连接软轴,软轴通过捆绑带固定在机架上,软轴带动扶持器进行旋转工作。
如图3所示,一对保护罩分别安装在两个扶持器的上方,利用两个扶持装置形成的中间空隙不仅起到扶持蒙古韭的作用,还可以将即将被收割的蒙古韭束聚拢,便于后续的切割作业。护罩结构如图4所示。
机器工作时,扶持器的工作效率与其旋转作业速度有关。扶持器相对地面的线速度v应该小于1.5m/s,本文取1m/s。
v=πd0n60
(1)
式中:
v——
扶持器相对于地面的线速度,v=1m/s;
d0——
扶持器最大端直径,d0=0.2m;
n——扶持器转速,r/min。
计算可得扶持器转速n=95.49r/min。
查资料可知扶持器正常工作的必要条件是拨禾速度比λ>1[1112]。本文取λ=2,则扶持器中心相对割刀的垂直距离
H=l-h+Rλ
(2)
式中:
l——蒙古韭的高度,取l=230mm;
h——割刀离地高度,h=25mm;
R——
扶持器最大端半径,R=80mm;
λ——拨禾速度比,λ=2。
计算可得扶持器中心相对割刀的垂直距离为245mm。
2.2 输送装置设计
1) 一级输送装置结构设计。输送装置由一级输送装置和二级输送装置组成,共同完成蒙古韭输送作业。一级输送装置由两个前辊、两个后辊、夹持输送带、夹持带辊、变向压紧辊和距离调节装置等组成,其中两个后辊与二级输送装置相接。
如图5所示,两个前辊、两个后辊均安装在机架的前部,一条输送带安装在一个前辊和第一后辊上,另一条输送带安装在另一个前辊和第二后辊上。变向压紧辊作用是改变输送带的输送方向,使输送带由竖直输送方式转变为水平输送方式。另外夹持带辊作用是支撑两输送带及通过调节距离装置改变两条输送带间的间隙,两输送带间形成的间隙用来夹持输送蒙古韭。
2) 一级输送装置主要参数计算。一级输送带的输送速度对蒙古韭收获速率有至关重要的影响,当一级输送带输送速度较快时,所夹持的蒙古韭厚度较小,当一级输送带的速度较慢时所夹持的蒙古韭厚度较大,所以一级输送带的输送速度非常重要,夹持的蒙古韭厚度由单位时间切割的蒙古韭数量来决定,其计算如式(3)所示。
V0Bq1=V1dq2
(3)
式中:
V0——
收割机行走速度, V0=0.42m/s;
q1——蒙古韭生產密度,kg/m3;
B——割幅,B=0.25m;
V1——一级输送带速度,m/s;
d——
蒙古韭在一级输送带的夹持厚度,d≤30mm。
q2——
蒙古韭在输送带上的输送密度,kg/m3。
可得
V1=V0Bq1dq2=V0Bkd
(4)
式中:
k——
蔬菜积集系数,k=q1/q2,取18~33[13]。
计算可得一级夹持输送带输送速度为≥0.14m/s。
为确保蒙古韭经一级输送带夹持输送过程中不损伤蒙古韭,还需对一级输送带进行挤压力测定。试验材料为数显推拉力计一个、尺子一把、试样、细绳等。试验选取一级输送带距前端10cm、20cm、30cm、40cm、50cm这5处,在每一处分别拉动10mm、20mm、30mm,分别测量其挤压力数值,为确保试验准确性进行3次重复试验测定取其平均值。测定时,将试样放在一级输送带中间被一级输送带夹持住。用细绳将数显推拉力计连接,测得其拉力值,其拉力值等于挤压力值,试验结果如表2所示。
由表2可知,一级输送带间挤压力的最大值为37.6N,一级输送带间挤压力的最大值小于蒙古韭的最大破坏力145.2N,满足设计要求。
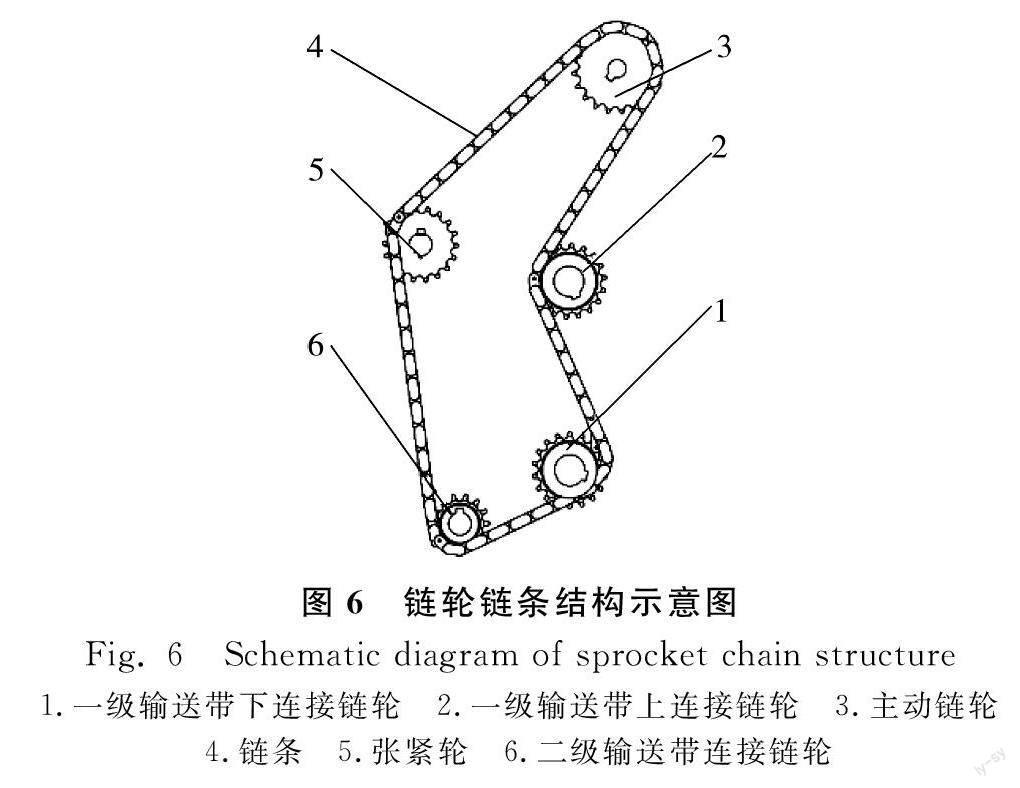
3) 链传动的设计计算。蒙古韭收割机输送装置以链条传动作为主要传动方式。链轮链条布置方式如图6所示。
其工作过程为:首先主动链轮与电机相连接,电机工作时直接带动主动链轮旋转,然后通过链条带动1、2、6号从动链轮运转,链轮1、2带动前方与输送带相连的两个带辊转动,进而一级输送带开始工作,链轮6与二级输送带连接,使蒙古韭输送至机器后方的收集箱内。
蒙古韭收割机的一级输送、二级输送装置位置是固定的,其结构决定了主动链轮的位置,根据输送带辊的尺寸,一级、二级带辊的位置固定,与一级二级输送带带辊相啮合的从动链轮齿数可以确定。根据蒙古韭收割机输送作业要求,选取主动链轮的齿数为19,链轮的转速n1与电机輸出端转速均为93r/min。链轮链条工作过程中,首先是主动链轮传动至一级输送带前辊的路线,一级输送为两条带夹持输送,所以链轮1和链轮2大小相同,齿数都为19,所以其传动比都为1,链轮6因二级输送带作业速度要求,链轮转速为69r/min,取链轮为14齿。因链轮5是张紧轮与传动比无关,取链轮5齿数Z5=14[14]。
通过计算确定链条链节数为97节、链条节距为9.525mm、链长为0.92m、链条速度为0.29m/s、小链轮包角为177.7°。并计算出主动链轮齿根圆直径为51.52mm,从动链轮6的齿根圆直径为36.46mm[15]。因链轮1、链轮2齿数相同,所以其参数都相同。
2.3 整机机架校核分析
本设计的蒙古韭收割机的整机机架设计应保证足够的承重力、耐腐蚀和抗震性能等。利用SolidWorks对整机机架进行参数化建模,进行静力学分析。测量每个电机以及安装在机架的各个部件的质量,添加对应的压力,并将安装底轮的四个耳座设为固定约束。整机机架材料为Q235结构钢,其许用应力由式(5)可得。
σ=σsn
(5)
式中:
n——材料安全系数,取n=1.5;
σs——
材料屈服极限,σs=235MPa;
[σ]——材料的许用应力,MPa。
计算得出[σ]=156.67MPa。机架的应力分布情况如图7所示,形变情况如图8所示,通过仿真结果可以看出,机架所承受最大应力处在前轮与机架相连的耳座处,最大应力为σ=57.579MPa,整机机架最大位移为0.72mm。因σ<[σ],则整机机架在最大负载状态下不会发生断裂和弯曲变形,通过计算可得,整机机架载荷应力校核满足要求。
3 田间收割试验
3.1 试验条件
田间收割试验在吉林省松原市前郭尔罗斯蒙古族自治县乌兰图嘎镇董家村进行,试验样品蒙古韭生长较均匀,无明显缺株现象;收获时从蒙古韭的鳞茎上部进行刈割[16]。试验时间为2021年9月12日早上6:00—8:00,完成收割试验和记录数据等工作,试验温度为17℃~20℃。试验蒙古韭生长状况较好,株距为30cm,行距为10cm,蒙古韭高度为18~28cm,蒙古韭平均含水率为92.98%。试验前,对试验田进行检查,保证地面平坦、无障碍物,并按要求调试蒙古韭收割机各部分装置保证其正常工作。
3.2 评价指标及试验方法
根据中华人民共和国农业行业标准NY/T 3664—2020《手扶式茎叶类蔬菜收获机质量评价技术规范》等国家相关标准测试方法,选取有效收割率和割茬整齐率作为试验评价指标[1721]。
有效收割率是评价收获作业效果的一个重要指标,可以通过计算损失的蒙古韭数量继而得到蒙古韭的有效收割率,损失是指在割幅内,应收未收的蔬菜。
有效收割率
S1=1-n1N×100%
(6)
式中:
n1——田间收获损失蔬菜质量,kg;
N——收获蔬菜总质量,kg。
割茬整齐是指收获蔬菜中,割茬没有损坏或残缺的蔬菜。
割茬整齐率
S2=1-n2N×100%
(7)
式中:
n2——割茬不齐的蔬菜质量,kg。
通过设定试验影响因素对蒙古韭收割机工作的性能进行试验分析。在确定试验影响因素的过程中,首先分析蒙古韭的物理特性,确定对本次试验结果影响较大的因素,基于对收获工作环境、工作要求以及作业对象等因素的考核可知,影响蒙古韭收获效果主要试验因素为机器前进速度、蒙古韭高度、割茬高度。
3.3 试验结果与分析
进行前进速度因素对评价指标影响的试验时,选取1.5km/h、2km/h、2.5km/h、3km/h四个水平指标进行收割试验,在试验过程中割茬高度和蒙古韭高度保持不变,选取割茬高度最优为2.5cm,蒙古韭高度为26~28cm;进行蒙古韭高度因素对评价指标影响的试验时,选取18~20cm、21~23cm、23~25cm、26~28cm四个水平指标进行收割试验,在试验过程中割茬高度和前进速度保持不变,选取割茬高度最优为2.5cm,前进速度为2.5km/h;进行割茬高度因素对评价指标影响的试验时,选取1.5cm、2.5cm两个水平指标进行收割试验,确保在试验过程中机器前进速度和蒙古韭高度保持不变,选取最佳机器前进速度2.5km/h,蒙古韭高度26~28cm。
1) 前进速度对评价指标的影响。前进速度对有效收割率及割茬整齐率的影响如图9、图10所示。根据图9可以看出机器的前进速度对有效收割率有很大的影响,随着机器前进速度的加快,有效收割率呈现上升的趋势,作业速度在3km/h时达到最大有效收割率98.4%。这是由于机器前进速度较慢时,倒伏的蒙古韭因前进速度过慢而切割不到因而发生漏割,而且当机器前进速度较快时,机器的前进速度和输送机构输送速度配合较好,输送过程中脱落的蒙古韭减少,从而有效收割率增大。根据图10可知,随着机器前进速度的加快,割茬整齐率逐渐提高,这是由于机器前进速度较慢时,割刀对蒙古韭的冲击力相对较小,此时蒙古韭的割茬就相对不整齐;当机器前进速度加快时,割刀对蒙古韭的冲击力增大,蒙古韭的割茬就相对整齐,从而割茬整齐率随着机器前进速度的增大而增大。
2) 蒙古韭高度对评价指标的影响。蒙古韭高度对有效收割率以及割茬整齐率的影响,如图11、图12所示。
可以看出,蒙古韭高度对有效收割率和割茬整齐率有很大影响,随着蒙古韭高度的增加,有效收割率也不断增大,而割茬整齐率却出现下降的趋势。当蒙古韭高度达到在18~20cm时有效收割率低于20%,割茬整齐率却达到97%,当高度增加到26~28cm时,有效收割率达到98%,割茬整齐率降到95%。这是因为一级夹持输送装置前端距离地面有一定高度,当蒙古韭植株高度较低时,蒙古韭经一级夹持输送带输送时,一级输送带夹持蒙古韭的长度较短,从而出现割断却未被有效夹持输送的现象,因此蒙古韭的有效收割率就会降低;当蒙古韭植株较高时,一级输送带夹持蒙古韭的长度就会增大,出现割而无效夹持输送的情况就会降低,收割有效率就会增大。另外,由于蒙古韭越高,蒙古韭植株的重心就會上移,割刀切割蒙古韭的过程中忽略其他因素的影响,蒙古韭只受惯性力和弯曲影响,蒙古韭高度越高经割刀切割时其自身弯曲的角度越大,收割后就会容易出现割茬不整齐的现象,割茬整齐率就会随着蒙古韭高度的增大而下降,反之亦然。
3) 割茬高度对评价指标的影响。割茬高度对评价指标的影响如表3所示,可以看出,当机器前进速度和蒙古韭高度一定时,割茬高度越低,收割效果越好,有效收割率越高,割茬整齐率越高,割茬高度在2.5cm时,有效收割率和割茬整齐率分别为98.3%、95.9%。在进行蒙古韭收割作业时,要确定合适的割茬高度,若割茬高度太低,则会影响蒙古韭再次生长,若割茬高度太高则会影响蒙古韭的品质和收获质量,影响种植者的经济效益。本试验所选割茬高度均符合蒙古韭的留茬要求,有效收割率和割茬整齐率均满足蒙古韭收割机的性能要求。
4 结论
1) 针对蒙古韭叶嫩、汁多、易损,采收困难等问题,通过对蒙古韭力学特性进行分析,结合蒙古韭的种植农艺要求,设计了一款蒙古韭收割机。根据理论分析,确定了蒙古韭收割机技术参数,完成了对切割装置、扶持装置、输送装置等关键零部件的设计计算及整机机架校核。确定相关结构及性能参数为扶持器中心相对割刀的垂直距离为245mm、机器前进速度1.5~3km/h、一级夹持输送带输送速度为≥0.14m/s、一级输送带间挤压力的最大值为37.6N、传动链条链节数为97节。
2) 样机试验结果表明,有效收割率、割茬整齐率随着机器前进速度的增大而增大;蒙古韭高度越高有效收割率越大,而割茬整齐率越低;有效收割率和割茬整齐率随着割茬高度的增大而降低。当割茬高度为2.5cm时,机器渐进速度为3km/h时,有效收割率为98.4%、割茬整齐率为96.2%,收割效果良好,满足收割要求。
参 考 文 献
[1] 斯琴巴特尔, 刘新民. 蒙古韭的营养成分及民族植物学[J]. 中国草地, 2002, 24(3): 52-54.
Sechenbater, Liu Xinmin. Nutritional compositions and ethnobotany of Allium mongolicum Regel [J]. Grassland of China, 2002, 24(3): 52-54.
[2]王吉国, 刘万山, 闫海旺, 等. 地被植物沙葱设施育苗栽培技术[J]. 北方园艺, 2020(15): 173-174.
[3] Nang V N, Yamane S. Development of prototype harvester for head lettuce[J]. Engineering in Agriculture, Environment and Food, 2015, 8(1): 18-25.
[4] 赵霞, 高菊玲, 钟兴, 等. 一种轻便型叶菜类收获机械的设计[J]. 内燃机与配件, 2017(11): 8-9.
[5] 富来威叶菜收获机. 适合多种叶菜[J]. 农业机械, 2021(6): 36.
[6] 伍渊远, 尚欣, 张呈彬, 等. 自然光照下智能叶菜收获机作业参数的获取[J]. 浙江农业学报, 2017, 29(11): 1930-1937.
Wu Yuanyuan, Shang Xin, Zhang Chengbin, et al. Acquisiton of operation parameters of intelligent leaf vegetable harvester under natural lighting [J]. Acta Agriculturae Zhejiangensis, 2017, 29(11): 1930-1937.
[7] 胡敏. 菠菜整株机械收获试验台设计与试验研究[D]. 淄博: 山东农业大学, 2016.
Hu Min. Design and experimental study of test bench of spinach mechanical harvesting test-bed [D]. Zibo: Shandong Agricultural University, 2016.
[8] 王铁新, 李汝莘. 韭菜力学特性及收获割台的研究[C]. 中国农业机械学会. 2012中国农业机械学会国际学术年会论文集. [出版者不详], 2012: 284-288.
[10] 陈子林. 荸荠采收机设计与试验研究[D]. 武汉: 华中农业大学, 2017.
Chen Zilin. Design and experiment research of water chestnut harvesting machine [D]. Wuhan: Huazhong Agricultural University, 2017.
[11] 冯雨龙. 韭菜收割机关键部件设计及试验研究[D]. 沈阳: 沈阳农业大学, 2019.
Feng Yulong. Design and test of key components of leek harvesters machine [D]. Shenyang: Shenyang Agricultural University, 2019.
[12] 贾智博. 大葱茎秆力学特性测试系统的设计与试验[D]. 泰安: 山东农业大学, 2018.
Jia Zhibo. Design and experiment of mechanical characteristic test system for scallion stalks [D]. Taian: Shandong Agricultural University, 2018.
[13] 高龙, 袁永伟, 弋景刚, 等. 小型韭菜收割机的改进设计与试验[J]. 食品与机械, 2016, 32(4): 117-119.
Gao Long, Yuan Yongwei, Yi Jinggang, et al. Revised design and experiment on small leek harvester [J]. Food & Machinery, 2016, 32(4): 117-119.
[14] 哈尔滨工业大学理论力学教研室. 理论力学(Ⅰ)[M]. 北京: 高等教育出版社, 2016.
[15] 范修文. 玉米收获机主要工作部件试验台的设计与试验[D]. 泰安: 山东农业大学, 2010.
Fan Xiuwen. Design and experiment of test-bed for main working parts of corn harvester [D]. Taian: Shandong Agricultural University, 2010.
[16] 张凤兰, 王佳琪, 杨忠仁, 等. 沙葱新品种沙珍SC-2号及其栽培技术[J]. 中国蔬菜, 2021(3): 120-122.
[17] NY/T 3664—2020, 手扶式莖叶类蔬菜收获机质量评价技术规范[S].
[18] 冯健, 李丹阳, 吴传云, 等. 油菜籽联合收获机作业效果综合测评[J]. 中国农机化学报, 2023, 44(1): 65-68.
Feng Jian, Li Danyang, Wu Chuanyun, et al. Comprehensive testing on working effects of the rapeseed combine harvesters [J]. Journal of Chinese Agricultural Mechanization, 2023, 44(1): 65-68.
[19] GB/T 5567—2008, 农业机械 生产试验方法[S].
[20] 沈启扬, 雷哓晖, 马拯胞, 等. F.US-UFO型果园避障割草机试验研究[J]. 中国农机化学报, 2021, 42(10): 65-71, 77.
Shen Qiyang, Lei Xiaohui, Ma Zhengbao, et al. Experimental study on F.US-UFO mower for avoiding obstacles in orchards [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(10): 65-71, 77.
[21] 王锦江, 陈志, 杨学军, 等. 制种玉米父本整秆切除铺放机设计与试验[J]. 农业机械学报, 2017, 48(2): 104-109.
Wang Jingjiang, Chen Zhi, Yang Xuejun, et al. Design and experiment on seed corn whole stalk cutting-placementing machine of staminate plant [J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(2): 104-109.