架空线路综合在线监测系统设计与安装研究
2023-08-04 02:52杨道远张宝俊
科技创新与生产力 2023年6期
杨道远,张宝俊
(兰州石化公司机电仪运维中心, 甘肃 兰州 730060)
电力资源作为社会经济建设与人民生活水平提升的重要保障之一, 对社会经济的安定发展具有支撑作用。 电网设施作为电力供应整体架构的主要部分之一, 其设施安全必须得到保障[1]。 架空输电线路的运行环境一般较为复杂, 因此输电线路不仅容易受到外部自然因素的长期侵扰, 还容易受到人为因素的干扰, 极易形成电网事故。 传统的视频监测方式监测效率低下, 同时报警联动力低, 无法在事故发生前及时报警, 也无法在事故发生后对现场进行有效还原, 因此设计具有强报警联动力的在线监测系统是很有必要的[2]。 该类系统可以根据架空线路的安全特点进行动态化监测和实时报警联动, 实现对电网线路的多角度、 全面化保护, 在事故发生前做到及时预警和制止, 在事故发生后做到事故记录和还原, 实现信息化、 动态化监测[3]。 因此本研究结合架空线路特点, 设计综合在线监测系统, 为电网安全监测实践提供理论基础。
1 架空线路综合在线监测系统设计
1.1 系统架构设计与监测机制分析
由于架空输电线路容易在自然因素或人为因素的干扰下发生电网事故, 因此本研究针对架空输电线路特点设计综合在线监测系统。 在设计架空线路在线监测系统时, 将系统的功能模块划分为两大部分, 分别为监测模块和信息模块。 监测模块为架构的主体模块, 依托架空线路特点进行布局。 在设计系统监测模块时, 以综合监测主机作为模块中心,围绕主机进行设计。 综合监控主机是独立运行的嵌入式系统, 其嵌入式模块化设计可24 h 连续运行。本研究将综合监控主机与激光水平探测仪搭配进行外部探测。 激光水平探测仪是一种综合当今安防领域最新科技的高性能双窗口探测器, 由主体激光发射装置和被动激光放大接收装置电路及不易老化的监测模块和模糊逻辑数码核心构成[4]。 另外, 在线监测系统以3G/4G 作为通信连接方式, 以该方式实现网络服务器与激光防外破系统的串联。 架空线路综合在线监测系统前端设备包括综合监控主机、 4G无线传输模块、 报警联动单元、 激光水平探测仪、高速球形摄像头、 太阳能板、 锂电池组、 电源管理单元、 高声响喇叭、 警示灯、 防雨箱及安装夹具及线缆辅材。
在监测机制上, 本研究以架空线路的铁塔作为主要监测支点, 将架空线路综合在线监测系统安装于铁塔上, 利用塔上安装的激光水平探测仪和AI视频监控进行双重探测保护, 对保护区内闯入的物体或人员等进行全天实时监测。 在此基础上采用智能物体算法对系统处理后的信号进行解算, 检查架空线路区域内是否出现车辆、 吊车超高等情况。 激光水平探测仪通过智能物体分析算法对车辆、 吊车超高等情况进行探测, 当吊车等物体接近高压线时, 现场装置的即时联动声光报警会对超高情况进行提示, 并催促其停止作业, 避免触线。 系统通过4G 无线将报警信号上报到中心平台, 并通过手机短信或平台监控软件通知接警人。 收到警报后, 接警人可以立即通过手机平台或计算机平台开启无线实时视频, 查看架空线路区域现场情况, 并可以通过监控中心实时语音喊话制止危险作业行为。 AI 视频摄像机能对吊车等物体的入侵行为进行探测与智能识别, 当识别到有物体入侵便立刻开始录像, 通过监控中心的麦克风喊话制止危险作业行为。
在针对高空危险因素进行监测时, 系统同样采用“ 监测—警报—驱赶” 相联动的监测方式。 将杆塔倾斜探测器安装在杆塔的横担上, 其具有远距离无线通信接口, 负责与综合分析软件系统进行数据通信。 高速球形摄像头可在水平方向上360°连续旋转, 在垂直方向上的角度活动范围为-15°~90°, 支持自动翻转, 分辨率为200 万像素。 超声波驱鸟器用于驱逐架空线路区域范围内的鸟类。 其区别于传统的物理驱鸟器和简单超声波被动驱鸟装置, 运用雷达技术主动探测鸟类的靠近, 对附近探测到的鸟类立即启动驱逐功能; 利用高灵敏拾音器对鸟类声音进行探测, 一旦探测到鸟类声音立即启动驱逐功能。 负责供电的太阳能板主要材料为单晶硅片, 采用节能设计, 在无外界干扰的情况下, 大部分电路处于休眠状态, 当报警上报系统平台时启动, 最大程度上节约了电能, 并且可实现远程遥控开关机[5]。
1.2 系统信息模块设计
本研究在进行架空线路综合在线监测系统设计信息模块时, 主要以4G 全网通无线公网数据传输技术作为破外防数据传输和系统报警信号传输的主要基础。 系统根据架空线路现场实际通信情况选择通信方式, 采用无线多方通话系统与无线音视频系统进行无线联机, 以此实现远程音视频喊话功能。本研究的设计开发主要集中在软件的设计和开发上, 通过信号传输将监控中心后台与架空线路现场管理人员的终端或者手机进行连接。 在后台管理平台的支撑下, 高架线路防护区内的监控显示装置可以达到一屏多显的监测效果, 这种方式也更便于操作人员的管理。 操作人员可以采用多站点登录的方式进行通信连接, 出于多方联动监测考虑, 系统拥有16 个在线站点, 并且同时支持断线重连与最大网络延迟设置。 在调试信息模块设备时, 工作人员首先利用使用的终端发送短信至GW:211.168.68.228;TCP:8885;OM;1;TM;0;UN:card;UP:card 地 址, 使设备上线, 在此基础上便可调试监控软件的视频状态与报警功能状态。
2 架空线路在线监测效果分析
本研究在进行架空线路在线监测效果分析时,将分别从系统运行有效性与监测效果两个方面进行分析。 本研究主要采用现场无人机模拟实验的方式进行分析, 通过无人机来模拟威胁性物体, 进而从不同的距离与角度分析研究设计系统的监测效果。在实验开始前, 需要对在线监测系统进行系统化调试, 在确认所有部件功能完好后通知后端测试人员进行调试。 在设备调试完毕后, 研究人员将对高压线路的名称、 高压千伏数、 杆塔号、 设备标示号及卡号等进行记录。 系统运行有效性分析结果见图1。
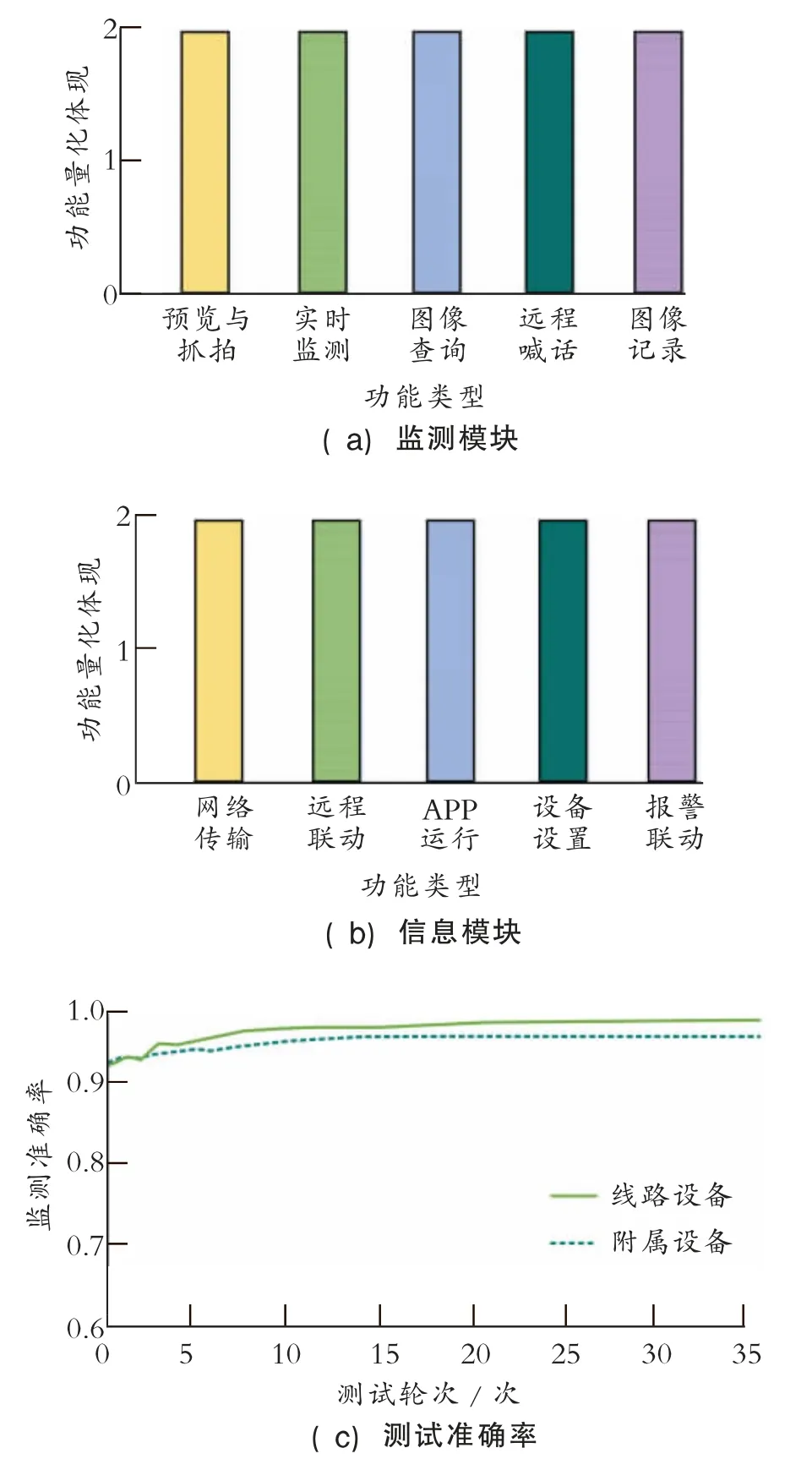
图1 系统运行有效性分析结果
由图1 可知, 本研究设计的系统主要分为两个运行功能模块, 分别为监测模块与信息模块。 监测模块包含预览与抓拍模块、 实时监测模块、 图像查询模块、 远程喊话模块、 图像记录模块, 信息模块主要包含网络传输模块、 远程联动模块、 APP 运行模块、 设备设置模块、 报警联动模块。 图1 中功能量化值1 代表系统模块在调试后未成功运行, 功能量化值2 代表系统模块在调试后成功运行。 由图1可知, 预览与抓拍模块、 实时监测模块、 图像查询模块、 远程喊话模块、 图像记录模块的功能量化值均为2, 代表模块运行正常; 网络传输模块、 远程联动模块、 APP 运行模块、 设备设置模块、 报警联动模块的功能量化值均为2, 代表模块运行正常。同时, 在准确率测试中可以看出, 随着测试轮次的增加, 线路设备的监测精准度呈现出前期有所上升、 后期趋于平缓的趋势, 同时整体曲线位于监测准确率0.9 上方。 在附属设备方面, 随着测试轮次的增加, 线路设备的监测精准度同样呈现出前期上升、 后期平缓的趋势, 整体曲线同样位于监测准确率0.9 上方。 由此可见, 本研究设计的系统在线路设备与附属设备两种设备类型上均具有显著的有效性, 监测准确率较高。 针对不同的危险物入侵方向下的系统监测情况进行分析, 分析结果见图2。
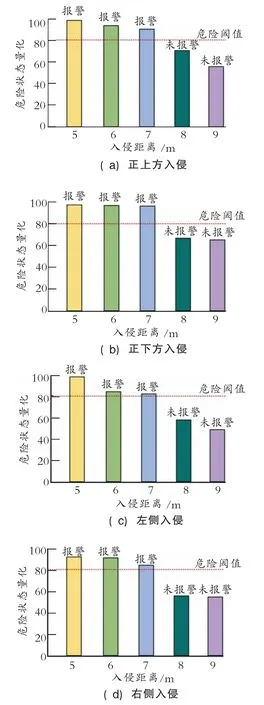
图2 不同距离入侵监测结果
由图2 可知, 在正上方、 正下方、 左侧、 右侧4 个方向的危险威胁下, 本研究分别对5 种不同的入侵距离情况进行了监测。 可以看出在正上方入侵下8 m 和9 m 的入侵距离均处于危险阈值线以下,系统也未对这两类入侵进行警报, 而5 m、 6 m 和7 m的入侵距离均处于危险阈值线以上, 系统对该3 类入侵状况发出了警报。 另外在正下方入侵、 左侧入侵与右侧入侵3 种入侵情况下系统的警报情况仍然相同, 观察这两种情况的危险值变化情况可以发现, 左侧入侵与右侧入侵情况中的6 m 和7 m 入侵距离均存在接近危险阈值的情况, 但是系统仍然发出了警报。 由此可见, 在危险值处于即将跌破危险警戒值的位置时系统仍然能够进行准确预警, 系统的警报功能具有稳健性和预防性。
3 结论
针对电网架空线路在自然因素或者人为因素下发生的线路事故, 本研究从事故中干预、 事故后记录两个视角出发, 以激光探测技术为基础设计了一种具有综合监测功能和信息传输功能的综合性在线监测系统。 其中监测功能模块用于达到全面监测效果, 而信息模块用于达到远程联动和报警联动效果。 本研究采用实地实验的方式进行监测效果分析, 结果显示系统对线路设备与附属设备的监测精准率均处于0.9 以上; 在正上方、 正下方、 左侧、右侧4 个方向下, 7 m 以内的入侵会触发警报。 由此可见, 研究设计的架空线路综合在线监测系统能够达到高精准度、 高即时性远程动态监测的效果,能有效保证架空线路的设备安全和电网完整性。
猜你喜欢
今日农业(2021年17期)2021-11-26
建材发展导向(2019年5期)2019-09-09
电子制作(2018年12期)2018-08-01
铁道通信信号(2018年5期)2018-06-28
汽车维护与修理(2016年10期)2016-07-10
互联网天地(2016年2期)2016-05-04
互联网天地(2016年1期)2016-05-04
小学生·多元智能大王(2015年3期)2015-05-25
电测与仪表(2015年2期)2015-04-09
汽车维护与修理(2015年6期)2015-02-28