浅析针对全球卫星信号的弱干扰消除方案
2023-07-28 08:41:04翟晓东张禛君
科学技术创新 2023年19期
翟晓东,张禛君
(上海司南卫星导航技术股份有限公司,上海)
引言
传统的干扰消除方案[2]主要有两种:第一种为数字信号在时域处理的干扰消除方案;第二种为数字信号在变换域处理的干扰消除方案。首先在时域的数字信号处理方案具有算法复杂度高、干扰消除延迟大两大缺点;其次在变换域的干扰消除方案虽然具有干扰消除延迟小的优点,但是技术实现比较困难。变换域干扰消除的技术方案[3]主要利用快速傅里叶变换(FFT)将信号从时域变换到频域上,在频域上统计每个频点的能量,判断每个频点是否是干扰频点的技术方案。与时域干扰消除方案相比,频域干扰消除方案具有时间延迟小,可以消除任意类型干扰的优点,在工程上一般都是使用该方案。
但是,在实际工程应用中,传统干扰消除系统存在干扰探测灵敏度差、干扰消除功耗大、干扰消除效率低三大缺点,所以针对传统干扰消除系统的缺点,本文旨在通过新的设计方案,对以下几点进行优化:
首先,对传统干扰消除方案的结构进行优化来降低整体硬件实现功耗。
其次,对输入中频信号的相干积分法,提高干扰探测灵敏度,有效提高对弱干扰信号的消除效率。
最后,通过实时更新干扰判断的门限阈值来实现干扰消除的自适应能力。
1 传统干扰消除方案
GNSS 卫星信号的传统干扰消除方案主要采用干扰探测器(CW Detector)和干扰消除器(CW Canceler)组成,分别是用来判断信号中是否存在干扰和查找干扰频点并消除。GNSS 卫星信号干扰消除方案的典型的结构如图1 所示。

图1 干扰消除典型结构框图
当干扰探测器(CW Detector)检测到信号中干扰存在时,使能打开后续的干扰消除器(CW Canceler),没有检测到干扰时关闭干扰消除器,直接旁路by pass通过数据。
干扰探测器(CW Detector)的功能是检测信号中是否存在干扰,其核心部分是一个数字扫频仪,组成结构如图2 所示。先后通过本地数控振荡器NCO 和窗函数对输入中频信号做频谱分析,从而完成滤波选频,达到指定频点抽取的目的,针对每一个抽取的频点,计算复信号I/Q 两路的模值,该模值一方面用于更新干扰探测器的阈值门限,另一方面用于统计所有频点的最大值,并判断最大值是否超过阈值门限,一旦信号中某个频点的强度超过阈值,则认为信号中存在干扰信号,从而使能打开后续的干扰消除器。

图2 CW Detector 典型操作流程图
干扰消除器(CW Canceler)的功能是为了准确找到所有干扰频点并将干扰频点的频谱能量置为0,从而达到消除干扰的目的,组成结构如图3 所示[4]。输入中频信号先通过重叠加窗函数,再通过快速傅里叶变换(FFT),将信号从时域变换到频域,在频域搜索超过阈值的干扰频点,并将该频点的频谱能量置为0,再将干扰消除后的频域信号通过逆傅里叶变换(IFFT)变换成时域信号,最后通过反加窗函数将还原成连续的时域信号并输出。
2.2 两组受试者血清IL-15、MCP-1、TGF-β水平之间的相关性分析 经Pearson线性相关性分析,健康对照组受试者血清IL-15、MCP-1、TGF-β水平之间均无线性相关(P>0.05);骨关节结核患者血清IL-15、MCP-1、TGF-β水平之间亦无线性相关(P>0.05)。见表2。

图3 CW Canceler 典型操作流程图
在典型的干扰消除器中,一方面,干扰探测器用于检测信号是否存在干扰,然而干扰消除器也需要对输入中频信号的所有频点进行再一次扫描,以确认干扰频点位置;另一方面,干扰探测器中确定是否存在干扰的阈值门限需要足够的大,以防止干扰误检测;同理,干扰消除器中为防止检测虚警,造成信号不必要的损失和衰减,也需要将干扰频点的阈值门限设置在一个比较安全的范围。所以传统的干扰消除器存在以下缺点:
(1)干扰消除器包含了干扰探测器,对于重复的干扰探测器可以实时功耗性能可优化。
(2)干扰探测器对于弱干扰信号(弱干扰信号)的检测能力弱,不能有效的检测出弱干扰信号,容易漏检。
(3)干扰消除器不易搜索到弱干扰信号的干扰频点,对弱干扰信号的鲁棒性弱,干扰消除效率低。
2 弱干扰消除方案
在GNSS 卫星信号干扰消除过程中,针对难以检测的弱干扰信号消除问题,本文提案通过信号相干积分法提高弱干扰信号的干信比,从而有效的提高了弱干扰干扰信号的检测和消除效率,提高新设备对弱干扰信号的鲁棒性和灵敏性;并且通过优化干扰消除器结构,降低算法功耗,增强硬件资源使用率;在检测干扰的同时,实时自动更新干扰检测的阈值门限,可以对不同能量大小的干扰信号自适应消除。
本文提案的干扰消除器的整体结构如图4 所示。改进型干扰消除器结构优化掉了干扰探测器,在干扰消除器中增加了信号相干积分模块,所增加的模块已经在固件中完成,便于工程实现。
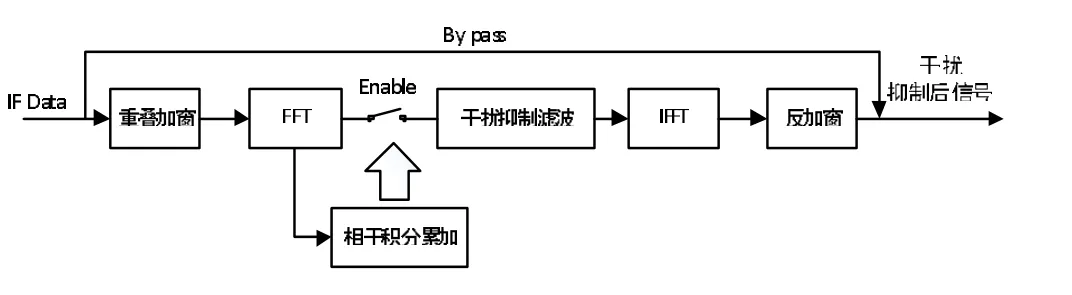
图4 本文提案的新干扰消除结构框图
对于输入的中频卫星信号IF Data,首先经过重叠加窗模块,得到加窗后信号;其次对加窗信号做快速傅里叶变换(FFT),将时域信号变换到频域;然后,对频域信号做相干累加,并判断峰值是否超过阈值,返回干扰是否存在标志和干扰频点;如果干扰存在,则打开自适应滤波模块,实现干扰消除;如果干扰不存在,则不打开自适应滤波模块,输入中频信号直接按照By pass 支路输出,其中频谱相干积分累加一方面可以检测信号中是否有干扰存在,通过相干积分累加可以逐渐突出干扰信号峰值的影响,以达到对弱干扰干扰信号检测和频点扫描的目的;另一方面可以输出干扰频点信息给后续的自适应滤波模块;同时还能自动更新自适应干扰消除的门限阈值参数。经过自适应干扰消除后的频域信号需要再经过逆傅里叶变换(IFFT),将频域信号转换到时域信号,最后经过反加窗函数,实现干扰自适应消除后的信号与输入信号的无缝连接,并输出,本文提案所有模块功能如图5 所示。

图5 本文提案干扰消除法中所有模块功能示意图
3 优化方案
针对于本文提案设计思路,还可以对某些模块进一步优化,以便降低硬件实现功耗,或则在增加硬件资源开销的前提下,获得对干扰灵敏度动态性的提升,这里列举两个不同方向的优化设计方案:
优化设计方案一:上述的FFT 和IFFT 算法,在硬件实现时,除了旋转因子的区别外并没有区别,所以重复利用FFT 实现IFFT 算法,以优化硬件资源功耗,提升硬件系统性能。如图6 所示。

图6 基于FFT 重复利用的IFFT 等效实现框图
中频信号经过加窗后顺序输入FFT 模块,逆序输出;经过自适应滤波模块后,重新做一次逆序,得到顺序频谱信号,重新输入FFT 模块,逆序时域信号输出,再做一次逆序,得到顺序输出的时域信号。即FFT 输出信号经过逆序、FFT、逆序的操作可以等价的得到IFFT 的输出。
优化设计方案二:在相干积分累加模块,增加/减少傅里叶变换点数或相干积分长度,实现干扰消除灵敏度性能的动态变化。比如通过增加傅里叶变换的点数或则相干积分累加的长度,虽然硬件资源的开销增多了,但是扩大了频点扫描范围,同时增强了对弱干扰干扰信号的检测能力。还可以根据需求适当减少傅里叶变换的点数或则减少相干积分累加的长度,以节省硬件功耗。如果相干积分长度退化为1,则等价于最简单的干扰探测器。
4 结论
本文主要在传统干扰消除方案的基础上,针对其缺点,提出新的干扰消除方案,详细介绍了新干扰消除方案的技术实现细节,并且在新方案的基础上提出了两个新方案,一是利用傅里叶变换和逆傅里叶变换的特点优化硬件资源利用率;二是利用相干积分技术提高干扰消除灵敏度技术。本文有效的拓展了干扰消除方案的设计思路,提高新干扰消除方案的可用性,为我国北斗卫星导航信号的广泛应用提供技术保证。
猜你喜欢
广东通信技术(2023年9期)2023-10-29 07:09:32
电气技术(2021年3期)2021-03-26 02:46:08
通信电源技术(2020年22期)2020-03-27 06:48:02
雷达学报(2018年3期)2018-07-18 02:41:34
工业设计(2016年6期)2016-04-17 06:42:54
火控雷达技术(2016年1期)2016-02-06 02:17:55
无线电通信技术(2015年3期)2015-12-23 11:37:02
电信工程技术与标准化(2015年10期)2015-12-22 09:08:10
电测与仪表(2015年3期)2015-04-09 11:37:24
海军航空大学学报(2015年4期)2015-02-27 13:45:51