基于“一线两向”模式下的无人机输电线路高效巡检方式研究
2023-07-26 03:42:08严峻超徐建军徐军波文香桂王力项恋
电子制作 2023年12期
严峻超,徐建军,徐军波,文香桂,王力,项恋
(国网江西省电力有限公司鹰潭供电分公司,江西鹰潭,335001)
0 引言
架空输电线路是保障电力远距离安全输送的基础,更会直接影响电力系统运行的安全性和可靠性[1]。在实际应用中,架空输电线路往往具有地形复杂、分布范围广、所处自然环境恶劣等特点,传统巡检方式使用人工进行逐点排查,其时间效率低、危险系数高,难以满足目前持续扩大的杆塔分布范围和愈加复杂的故障排查流程[2]。
实践证明,近年来市场上使用无人机进行电力巡检的系统具有工作量大、效率低、对飞手要求高等问题。目前对电力线路的精细化巡检中,普遍还是飞手动操作无人机[3-4],完成无人机空中悬停、对准、拍照,整个过程效率低、对飞手要求高。
为高效地实现塔间架空导线跟踪飞行,完成缺陷精准识别与实时飞行跟踪,本文将PaddlePaddle-YOLO(PP-YOLO)与卡尔曼滤波算法相结合,PP-YOLO 配合无人机上搭载云台相机传回的视频数据,给出抽帧识别结果,传输卡尔曼滤波跟踪模块,计算无人机的最优移动路径与云台相机的最优调整策略。
1 架空输电线路无人机高效巡检方法
■1.1 “一线两向”无人机高效巡检模式
目前使用飞手手工操作的无人机巡检模式受限于控制精度低,肉眼故障排查困难的特点,大都采用“一塔多点”的巡检模式,对单个杆塔的多个目标点位进行停留拍摄。“一塔多点”模式需要两个飞手协助,一个飞手控制无人机的移动,另一个飞手观察相机传回图像,对每座杆塔上多个关键巡检点位进行拍摄,同时实时观察并拍摄出现的异常点位,具有工作量大、时间长、效率低、对飞手要求高的特点,且移动过程中传回的视频数据冗余较多,效率不高。
■1.2 无人机仿线飞行技术
仿线飞行技术的前身是仿地飞行。仿地飞行是一种无人机飞行路线控制技术,他通过设定与已知三维地形的固定高度,使得飞机与目标地物保持恒定高差,保持无人机的地面分辨率一致。仿地飞行使用地图公开数据库中的地形信息和预扫飞行时软件录入的高程数据规划航线,需要一定的先验数据并人工设定飞行模式。
仿线飞行则是将仿地飞行中以地面为参照物改为以电线为参照物,通过视觉识别算法自动识别电线、绝缘子等位置,从而完成姿态调整、跟踪拍摄等一系列操作。完整的飞行周期可分为绕杆U 字形航线与仿线飞行两个部分,整个过程持续使用云台相机进行数据采集并反馈给云台,实时监测塔间缺陷。
2 无人机AI 视觉识别与目标跟踪
本章基于PP-YOLO 和卡尔曼滤波算法搭建AI 视觉识别与目标跟踪模块,完成无人机的塔间导线跟随飞行与缺陷实时检测等任务,图1 给出了无人机智能计算模块的整体框架。同时还介绍了以PP-YOLO 为核心算法的AI 视觉识别模块和以卡尔曼滤波为核心算法的目标跟踪模块。
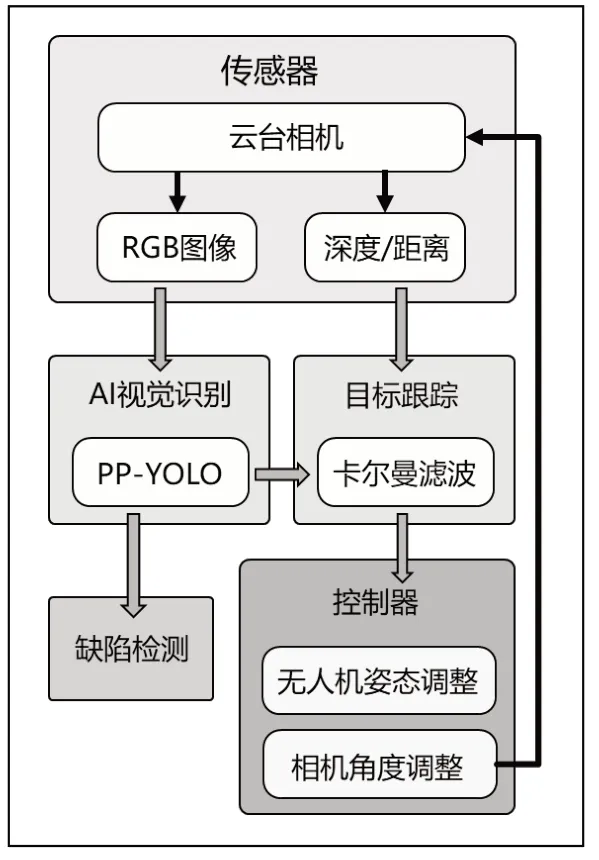
图1 无人机智能计算模块的整体框架
■2.1 AI 视觉识别模块
采 用PP-YOLO作为AI 视觉识别的核心算法,完成无人机飞行中的实时目标检测任务。在实时目标检测中,通过云台相机视频抽帧获取的单张图像作为AI视觉识别模块的输入,模块中使用PPYOLO 模型生成2D边界框来预测目标对象的位置。PP-YOLO 沿用了YOLOv3 的One-stage 结构,其检测器由骨干网、检测颈以及用于分类和定位的检测头组成。
PP-YOLO 在将锚点转换为包围框时,进行了如下计算:
■2.2 目标跟踪模块
利用2.1 节介绍的AI 视觉识别模块输出作为目标跟踪模块的输入,将完成坐标变换的目标位置信息输入到卡尔曼滤波器,在一段时间轴上持续预测目标的位置变化,使无人机能够跟踪飞行。根据云台相机所获取到目标的相对位置,以及无人机传感器所获取到的速度信息,建立待跟踪目标的状态向量
卡尔曼滤波器可以进一步被划分为时间更新和测量更新两个步骤,时间更新过程是指由上一时刻的状态加上外界输入噪声来预测当前状态,测量更新则是根据预测结果与观测结果来计算不确定性因子。具体地,可以描述如下:
卡尔曼滤波器解决了目标跟踪中的目标状态估计问题,具体来说,以目标当前状态作为输入通过滤波器后可以得到目标经过步长后的预测状态卡尔曼滤波过程是一个持续的迭代计算过程,这样,本文就可以通过对识别的目标进行持续跟踪飞行。
■2.3 无人机输电线路飞行巡检流程
具体来说,飞行作业流程可以做如下描述:通过所述图像识别单元识别所述图像信息的画面中心区域是否有跟随目标;若有跟随目标,则继续拍摄;若没有跟随目标,则识别所述图像信息的整个画面中是否有跟随目标,若有跟随目标,则通过所述信息处理单元计算出相机的最优调整策略,所述综合控制单元将相机最优调整策略转化为所述云台控制单元具体的控制指令,所述云台控制单元接收到控制指令,调整云台角度,直到目标位于图像信息画面的中心区域;若所述图像信息的整个画面中没有跟随目标,则初始化所述云台控制单元,重新通过所述图像识别单元识别所述图像信息的画面中心区域是否有跟随目标。
3 “一线两向”无人机飞行实验
■3.1 无人机硬件平台介绍
实验中采用的二代飞行平台为四旋翼主体结构,其中机身控制搭载双实时差分定位模块(Real-time kinematic,RTK)、视觉识别部分搭载HUAWEI Ascend 310 AI 计算芯片。无人机下方搭载使用3.5 倍光学变焦镜头的云台相机,相机俯仰转动范围,水平转动范围,角度抖动量。
二代无人机飞行平台具有航时长、平飞速度高、飞行速度稳定、抗风防雨能力强等性能特点,能够很好地完成多种复杂场景下的OLDT 模式输电线路巡检任务。
■3.2 无人机仿线飞行实验
仿线飞行测试路线如图2 所示架空看那个输电线路,无人机实际移动路线分绕杆U 字形航线和仿线飞行两个部分,架空输电线路杆塔挂点垂直距离13 米,左右宽6 米,杆塔间档距300 米。飞行作业中,对云台角度、飞行速度、变焦倍数、飞行路径、偏航率、缺陷识别率等参数进行测试。
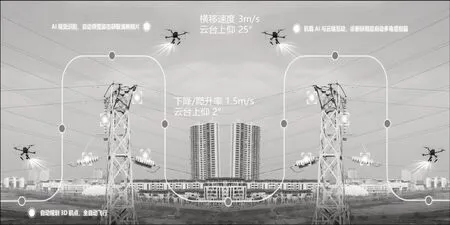
图2 飞行测试参数及路线示意

图3 仿线飞行测试中无人机海拔高度变化趋势
为了测试不同硬件条件下无人机自主巡检的性能参数,本文分别选取了和分辨率的云台相机进行测试。搭载摄像头的云台相机拥有更高的识别精度,能够拥有更大的绕线飞行半径、相对更高的仿线飞行速度以及更高的缺陷识别率。
在启动约5s 后,无人机以基本恒定的角速度进行转向与姿态调整,约5s 后,达到目标角度并开始跟随导线进行飞行。在随后飞行过程中,RTK 航向角基本保持恒定,角度抖动小于等于,表明本文设计的AI 视觉识别与跟踪算法能够很好地辅助无人机,完成架空输电线路巡检任务。
■3.3 缺陷检测与杆塔建模
云台通过对相机在绕杆U 字形航线中拍摄的6K 视频数据进行抽帧,使用缺陷识别算法,实时监测杆塔的销钉缺失等缺陷。
进一步地,利用采集到的杆塔本体数据,建立杆塔模型的数据库,对杆塔模型进行分类,实现杆塔识别,为后续实现自主塔间航线规划做足准备与数据铺垫工作。
4 结束语
本文提出了基于AI 视觉识别的“一线两向”模式的高效率巡检方式,并进行了相关飞行试验,将AI 视觉算法和跟踪算法与仿线飞行算法相结合,实现塔间导线跟随飞行、巡检数据的视频采集、缺陷实时检测等功能。
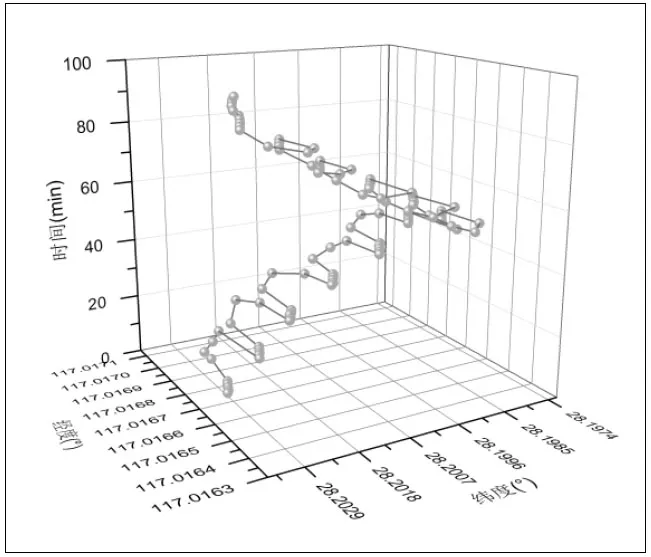
图4 仿线飞行测试中无人机经纬度变化趋势

图5 仿线飞行测试中无人机海拔高度与经纬度变化关系
(1)本文提出了“一线两向”的飞行模式,在一定程度上解决了“一塔多点”模式下的缺陷,在降低人工成本的同时提升了检测精度,相比于传统的仿地飞行无需先验数据,提升了巡航效率。
(2)本章基于PP-YOLO 和卡尔曼滤波算法搭建AI 视觉识别与目标跟踪模块,既平衡了检测精度和每秒传输帧数,又具有硬件性能依赖性低、速度快、准确率高、抗干扰素力强等特点。
(3)本文完成了架空输电线路的无人机OLDT 模式飞行巡检实验。实验结果表明,无人机搭载AI 视觉识别与跟踪算法,辅以仿线飞行技术能够准确地对目标进行跟踪飞行,并且飞行过程中各项数值基本稳定。
目前无人机在电力线路巡检领域的应用越发广泛,优化无人机巡检模式,在电力巡检工作中具有重要研究意义及极高应用价值,具备在各省乃至全国推广的意义。
猜你喜欢
现代装饰(2022年6期)2022-12-17 01:10:30
现代装饰(2022年6期)2022-12-17 01:09:42
摄影之友(影像视觉)(2020年2期)2021-01-14 05:34:28
今日农业(2020年14期)2020-12-14 19:47:34
——“飞手”成了农村热门新职业
农民文摘(2019年7期)2019-07-19 12:52:30
当代陕西(2019年11期)2019-06-24 03:40:32
电子制作(2019年23期)2019-02-23 13:21:16
中国信息化周报(2018年16期)2018-09-03 10:43:02
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
电源技术(2016年9期)2016-02-27 09:05:39