
世界第一台针灸机器人研制经验总结与启发*
2023-07-25 05:18:34刘进先徐天成张笑兴
科技与创新 2023年11期
刘进先,徐天成,张笑兴
(1.正源春中医门诊部针灸科,广东 广州 510630;2.南京中医药大学针灸系,江苏 南京 210023;3.广州天河区林和街社区卫生服务中心针灸科,广东 广州 510635)
1990 年,笔者在四川泸州医学院附属中医院(现为西南医科大学)针灸科工作期间,在临床治疗及科研中发现,每一个医生治疗同一个病人的选穴和针刺手法均不同,且同一医生自己也很难保证在行针之间的手法完全保持一致。这样的情况对科研工作者来说,就很难确保因针刺手法的不一致而导致的科研实验数据的客观性、科学性、标准性及量化的准确性,从而导致科研数据的真实性存疑。
为此进行了“针灸机器人”科研项目,目的就是使其针刺手法达到数量化、客观化、标准化、科学化,同时用针灸机器人来模拟名老专家的针刺手法并储存于本机中,再由本机器人按名老专家手法进行自动针灸以获得名老专家的治疗效果,并让名老专家的针灸技术永传后代。
另外,同时开发通用针灸诊疗电脑专家系统医理设计,由针灸机器人自动诊断疾病,辩证选穴,再由针灸机器人进行针灸操作治疗。于1990—1996 年进行了以上科研工作,并开发出了一台针灸机器人样机,由于当时经费短缺尤其是电脑人工AI 及机器人方面的技术限制,未全部完成研制任务,但获得了一些开发研制方面的成功经验;但也有失败的经验,发现了一些技术上的难度是制约针灸机器人研制的瓶颈技术,至今可能也难以攻克。
随着机器人技术的突飞猛进、人工AI 智能的高度发展,以及卫星定位、高质量像素、高扫描仪器及传感器的高度发展,现又掀起了一股针灸机器人的研发高潮[1-2],为此本文总结了30 年前的研究成果以供后来者借鉴参考。
1 研究方法
1.1 针灸机器人针刺手法技术参数及试验穴位确定
试验穴位主要是对下关、曲池、足三里、梁丘、丰隆、期门、肺俞、百会等头、面、胸、背及四肢的代表穴位进行试验针刺,以点带面,便于全身穴位使用。选用针具为华佗牌不锈钢针,规格为26~30 号、0.5~5 in(1 in≈2.5 cm,现代针灸针具特指长度,下同)长的各种常用针具,均为一次性无菌针灸针。进针角度分为直刺、斜刺、平刺3 种角度。进针方法为夹持捻转进针。进针速度均采用快速刺入皮下再按要求进行各种手法操作。留针时间一般为10~30 min,也可根据需要任意确定留针时间。取穴方法根据传统的骨度分寸、解剖标志、手指同身寸和简便取穴方法等。手法种类分为疾徐法、提插法、捻转法、迎随法及平补平泻法共5 种单式手法,以及提插加捻转法、疾徐、提插加捻转法等9 种复式手法[3]。
针感即针刺后病人的酸、麻、胀等感觉。得气后,由病人按电钮给控制系统一个信息,则自动停止进针,然后在此水平采用提插、捻转各种手法。晕针时,由现场医生及时进行处理。
1.2 电脑专家系统医理设计
大病域通用针灸诊疗电脑专家系统作为针灸机器人的一个组成部位,由针灸机器人来自动诊断疾病和辨证施治给出治疗法则和处方选穴。本专家系统实现了中医6 个科类72 个病种的针灸取穴方案(参照高等医药院校统编教材和知名专家专著进行病名筛选、辩证分型及取穴)[4-6]。然后输入此方案到控制系统,指令机械手进行针刺操作,该专家系统亦可单独作为电脑诊断疾病,辨证施治和开出针灸治疗处方交临床医生使用。
1.3 手法记录装置
手法记录装置可真实地记录著名专家的宝贵针刺手法的精髓,同时又可通过微电脑系统经计算机发出控制命令,驱动各执行机构协调针刺动作,从而按模拟专家的针刺手法对病人进行针刺治疗,使名老专家的针灸手法永传后代。
1.4 针灸机器人样机技术要求
根据针刺手法技术参数的要求,本样机应设计6个驱动电路,即6 个自由度才能确保针刺的位置和姿态,如图1 所示。
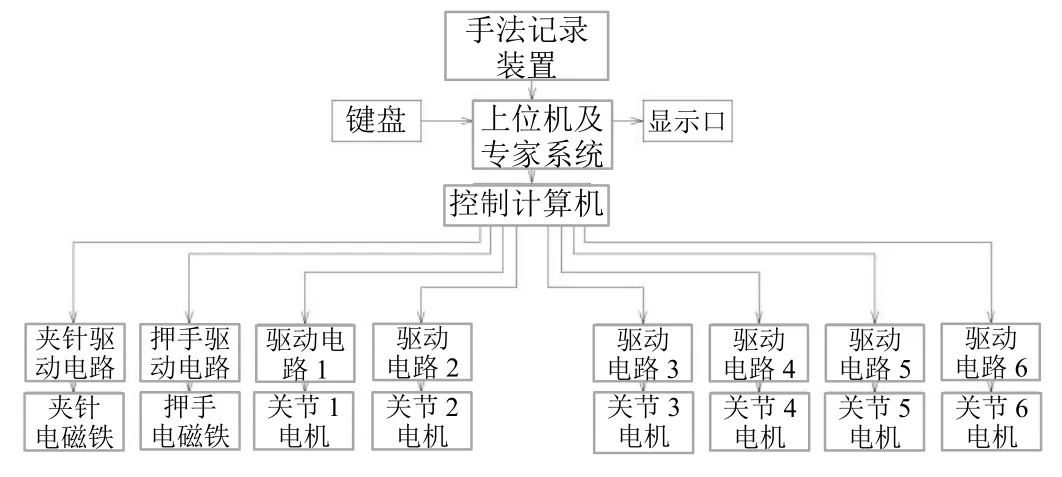
图1 控制系统结构框图
电源为交流电压220 V/50 Hz 或直流电压24 V。整机要求既能独立运行,又能与手法记录仪、专家系统组配使用。
微电脑系统由MCS-51 单片机及外设组成,能准确模拟和储存针刺手法,并与上位机通信,便于存盘;且能控制和发出命令,驱动各执行机构,进行各种针刺手法的操作。键盘应具有选择各种针刺手法、启动、停止等人机对话功能。数码管显示器应具有显示各种键盘信息和工作状态的功能,如图2、图3 所示。

图2 三步进电机驱动电源电原理图

图3 控制系统硬件框图
针灸机器人的功能要求是必须具备临床技术要求和针刺手法技术参数的要求,材料要求是必须要选用经久耐用、不易损坏、质优价廉的材料。驱动电路以小型号步进电机作为驱动部件,以保证执行。机械手和控制部分为最关键部分,如图4 所示。

图4 机械手装备图
要求机械手结构简单科学,使用灵活轻便,能持26~30 号、0.5~5 in 长的各种不锈钢针灸针,不能有丝毫松动和掉落发生,并进行自动选穴,自动进出针及各种针刺手法的操作,达到临床和手法技术参数的要求。押手装置应高于患者皮肤1~2 cm,具有辅助机械手进针的功能,当针刺进后,押手应自动松开针体而不影响各种针刺手法的正常操作,押手应上、卸方便,便于高温高压消毒。
本机进行操作的正常阻力为肌肉和肌腱组织,当遇见骨头时要求机械手自动停止进针。本机必须设置自动保险装置,一旦工作异常,该装置能自动停机,以确保安全。
根据临床技术和针刺手法参数要求,设计出相应的软硬件。专家系统由IBM 或兼容机、显示器、绘图仪手法记录装置等组成,要求本系统能准确模拟和储存专家的手法和诊疗经验,并进行诊断、取穴等工作。同时在显示屏上进行相应的显示,根据需要进行绘图和打印。
此针灸机器人既独立成体系,又可与针刺治疗机组配使用,并向微电脑系统输送信息,从而控制微电脑系统实现各种手法的操作。
针刺手法参数技术要求如下:进针速度为5~1 000 mm/s,刺入皮下瞬间为1 0 mm/s,提插幅度为0~30 mm,捻转角度为30°~360°,捻转频率为50~500 次/min,进针深度为5~100 mm,以上根据不同部位可进行相应的调整。
动物试验:择犬或猪为试验对象,共30 只,取已定穴位,在每只动物身上进行3~5 次试验,以观察样机的各项功能指标的安全度,然后才能用于人体试验。
临床验证:取50~100 例病人,在每例病人身上进行3~5 次针刺观察,对样机的质量、功能、安全度等进行全面考核验收。
2 研究结果
完成了通用针灸诊疗电脑专家系统的医理设计,并于1993 年发表在《泸州医学院学报》第1 期上[7],由于科研经费严重短缺,改为研制2 个自由度的机械手,并于1995 年研制出了具有2 个自由度的针灸机器人样机(在购买的猪腿和猪肉上进行了初步试验,达到了设计功能)。
该样机质量为100 kg,底座设置有4 个万向轮并带有刹车,根据针灸临床病房使用实际情况而设置了推车型针灸机器人以方便病床病人使用,由于针刺中会产生振动,故机器自身的质量较重以此保持稳定性;为了安全起见,避免针刺中推车滚动,所以转向轮设置了刹车装置。由于后续经费严重短缺故未进行临床试验,于1996 年底进行了结题。针灸机器人样机如图5 所示。

图5 台样机图
3 讨论
针灸机器人研究是现代电子计算机和高尖机械技术引入针灸领域的重大突破,使烦琐复杂的针刺手法简单化、规范化、量化,以便于临床运用和对外扩大交流,以上既是统一的整体,又可单独独立使用。
30 年前计算机和机器人技术相对于现在还比较落后,限于当时科学技术和经费问题,仅完成了部分工作,如前所述。
30 年前的设计思路与现在研究相比也是比较超前的,对当今研究针灸机器人有一定的借鉴和帮助。此外在研究中也遇到很大的技术障碍,或许今天也可能无法全部解决,原因是针灸机器人主要运用于临床治疗,首先是安全性问题,其次是疗效问题,具体如下。
3.1 穴位定位问题
人体有经穴361 穴,另加经外奇穴共计有400 多穴,再加上数不胜数的阿是穴,所以针灸机器人自动定穴、选穴,当时的技术很难达到,因此采用人工选穴定位予以配合。目前传感器、高像素相机及扫描仪、MR 及CT 成像技术、卫星定位技术是否可以应用到人体经络腧穴上准确定位,并由针灸机器人自动选穴进针,也是亟待解决的重大技术问题。
3.2 运针问题
针灸要反复运针才能确保疗效,因此机械手要来回运针,这是一个非常难的技术问题,因为来回运针要求重复精度和定位精度较高,必须要使用应变片作压力传感器以保证针夹头能准确地套住针尾并夹紧,但套针时,机械手对针尾的碰撞是否给病人一种痛的感觉,这些都是要解决的疑难问题。
3.3 安全性问题
安全性问题也是最关键的问题,针灸机器人是对人进行针刺,所以安全必须放在第一位。首先,进针深度根据不同部位必须严格控制,保证安全;其次,遇到阻力加大时(如骨头),机械手必须停针,否则会弯针、断针。传感器如何来判断肌肉、肌腱与骨胳阻力的不同参数,这也是待解决的重大技术问题。当时笔者因受到录音机放磁带的影响,受到磁带放完录音机就自动停止的启发,曾有研究过,但终因当时技术问题而未解决。
3.4 扫描储存名老专家手法问题
如何量化扫描名老针灸专家现场针刺手法并转由机械手按专家手法进行基本一致的操作,即一边是名老专家操作,另一边是机械手给另一个病人进行专家的同种手法操作,这也是一个很高的技术要求,这方面因为当时经费所限未开展此研究,但当初笔者是想借用上海市针灸研究所在20 世纪80 年代初研制成的“SFY-1 型复式针刺手法参数分析仪”[8]配合使用,建议现在研究者仍可参考该仪器的技术。
3.5 有效性问题
作为人体的治疗仪,必须保证临床治疗有效才能有价值。这方面要多扩大临床病人的试验例数,建议选取300~500 例病人进行试验。因当时科研经费严重短缺,故未开展此工作。
4 结束语
展望未来,当今计算机技术、机器人技术、人工AI 技术、传感器技术均突飞猛进,高度发展,已经逐渐具备了解决针灸机器人研制的瓶颈技术。今后研究开发针灸机器人的科研工作者可以在30年前研究的基础上,对曾经在研发中总结出的5 大技术问题采用现代高科技技术进行认真研究,相信在不远的将来,一个拥有完整构思的针灸机器人一定会诞生!
猜你喜欢
中国民间疗法(2023年1期)2023-04-05 23:39:18
中国特种设备安全(2022年4期)2022-07-08 02:42:40
世界科学技术-中医药现代化(2021年9期)2021-12-31 03:30:50
世界科学技术-中医药现代化(2021年8期)2021-12-21 07:04:52
中国民间疗法(2021年6期)2021-06-09 06:19:08
装备制造技术(2020年4期)2020-12-25 05:26:04
实用临床护理学杂志(电子版)(2017年40期)2017-11-03 10:57:46
上海针灸杂志(2017年7期)2017-07-24 15:55:16
时代农机(2016年6期)2016-12-01 04:07:20
环境科技(2015年4期)2015-11-08 11:10:40
