
无人机遂行纯方位无源定位的建模研究
2023-07-20 03:13李唯施一飞刘凯
无线互联科技 2023年9期
李唯 施一飞 刘凯

摘要:如今,无人机被广泛应用于辅助导航技术,且通常由多架无人机通过编队协同完成。为提升无人机编队飞行的效果,无人机遂行编队飞行的纯方位无源定位是当前的主流做法。文章基于最佳控制模型(FHOCP)与决策算法,快速有效地完成锥形编队中无人机的位置判断,通过设计最优调整方案,对问题进行求解与分析。文章设计的模型和算法对日常场景的无人机编队飞行具有较好的实用性。
关键词:辅助驾驶技术;无人机遂行编队;最佳控制模型;决策算法
中图分类号:TN95
文献标志码:A
0 引言
随着智能辅助驾驶技术的普及,无人机的定位技术显得尤为重要。对无人机进行定位有两种手段,一种是有源定位,主要是基于姿态测量或激光测距定位模型;另一种是通过无源定位,被动地接收电磁信号来确定位置。本次主要研究无人机遂行编队纯方位无源定位问题。先要解决无人机在同一平面的问题,在此基础上,由圆形编队拓展为锥形编队,本文分两部分完成无人机锥形编队的调度方案。(1)模型建立。無人机互相定位时有着重要的关系,无人机移动到指定位置,需要满足一定的条件,得到最佳控制模型的定位优化。(2)建立算法,进行模型求解。将无人机编号带入模型,得到无人机定位编号。此后再通过校准,确定所建模型在同一平面上。
1 模型的建立
为使问题得到简化,假设无人机之间在接收信号前后保持相对静止状态。
1.1 同一平面无人机定位模型
确定一个平面及任选2架无人机同时发射信号,使其余任意的1架无人机中收到的夹角为60°,其余2架无人机分别定为FY02和FY03。调整3架无人机两两间发射信号,使剩余1架收到的夹角都为60°的条件,形成等边三角形,而其需要满足的等式如下所示:
∠FY01=∠FY02=∠FY03=60°(1)
由于等边三角形的三边相等,无人机移动位置时,无人机须满足避让条件为:
∠ni≠∠mj
确定每架无人机的优先级,具体的优先选择情况如下:
其中,∠n为收到的角度最接近60°的无人机。
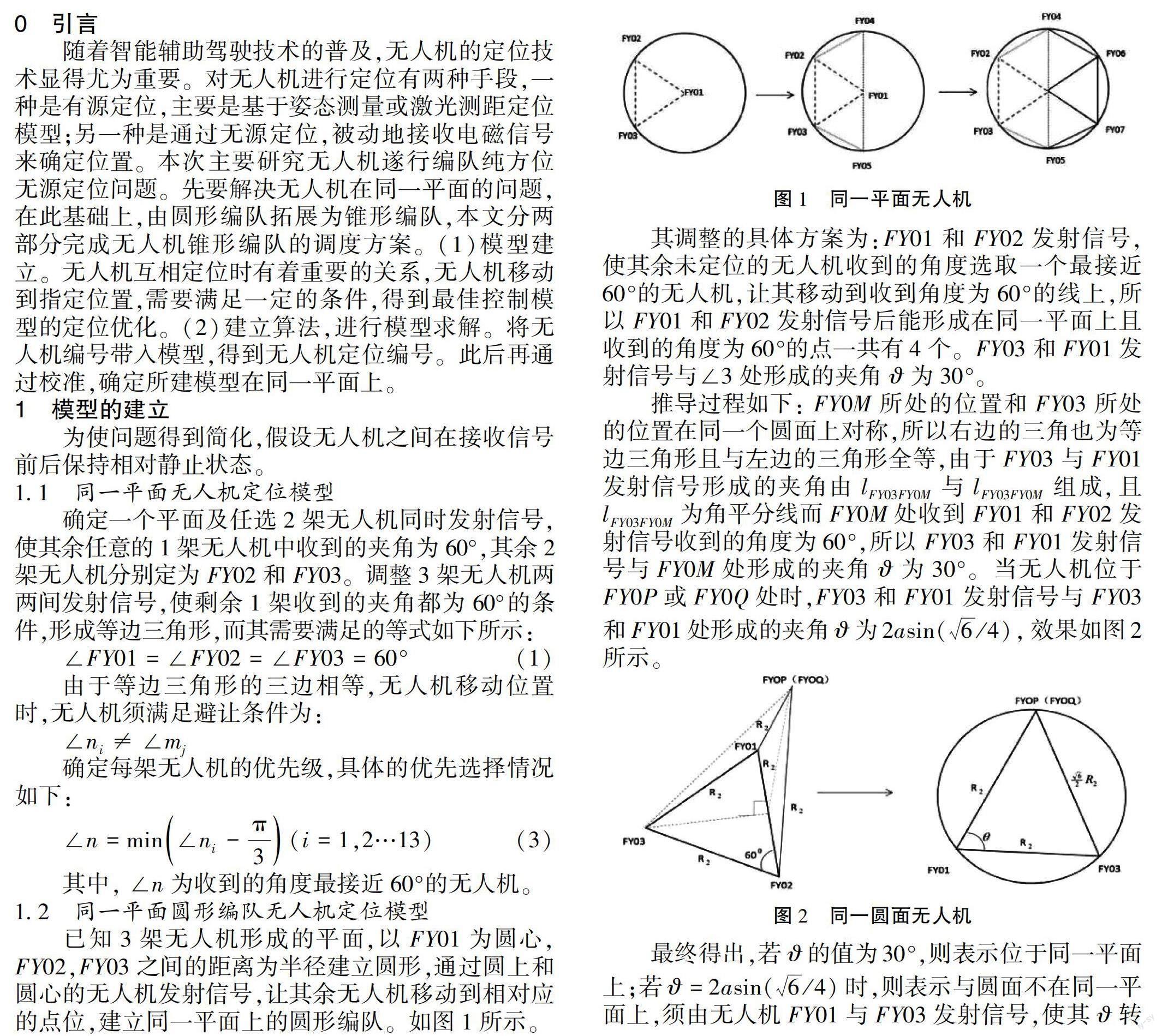
1.2 同一平面圆形编队无人机定位模型
已知3架无人机形成的平面,以FY01为圆心,FY02,FY03之间的距离为半径建立圆形,通过圆上和圆心的无人机发射信号,让其余无人机移动到相对应的点位,建立同一平面上的圆形编队。如图1所示。
其调整的具体方案为:FY01和FY02发射信号,使其余未定位的无人机收到的角度选取一个最接近60°的无人机,让其移动到收到角度为60°的线上,所以FY01和FY02发射信号后能形成在同一平面上且收到的角度为60°的点一共有4个。FY03和FY01发射信号与∠3处形成的夹角?为30°。
推导过程如下:FY0M所处的位置和FY03所处的位置在同一个圆面上对称,所以右边的三角也为等边三角形且与左边的三角形全等,由于FY03与FY01发射信号形成的夹角由lFY03FY0M与lFY03FY0M组成,且lFY03FY0M为角平分线而FY0M处收到FY01和FY02发射信号收到的角度为60°,所以FY03和FY01发射信号与FY0M处形成的夹角?为30°。当无人机位于FY0P或FY0Q处时,FY03和FY01发射信号与FY03和FY01处形成的夹角?为2asin(6/4),效果如图2所示。
最终得出,若?的值为30°,则表示位于同一平面上;若?=2asin(6/4)时,则表示与圆面不在同一平面上,须由无人机FY01与FY03发射信号,使其?转为30°的同时也满足FY01和FY02发射信号时无人机x收到的角度为60°,此时,可将无人机x为FY04。
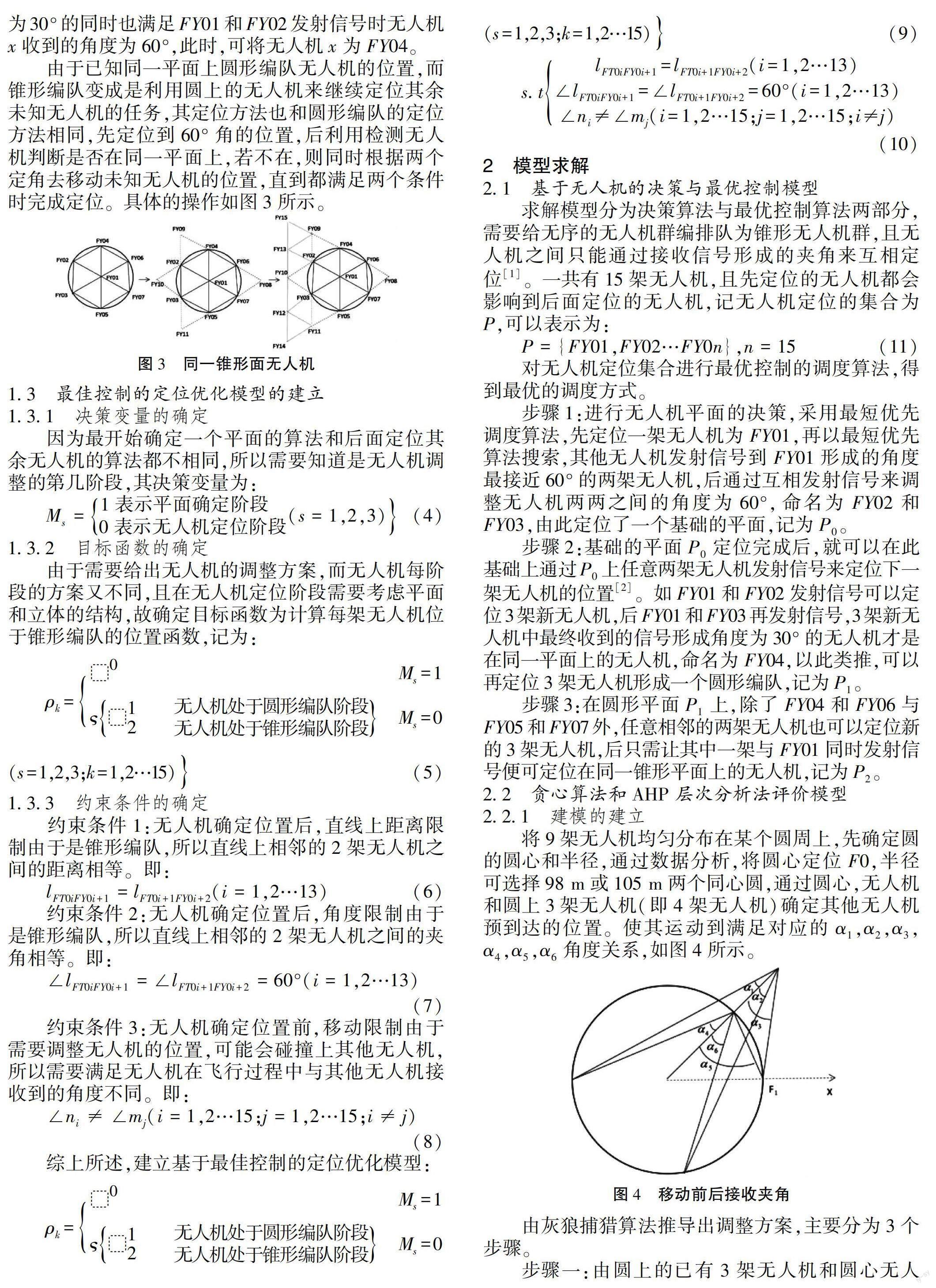
由于已知同一平面上圆形编队无人机的位置,而锥形编队变成是利用圆上的无人机来继续定位其余未知无人机的任务,其定位方法也和圆形编队的定位方法相同,先定位到60°角的位置,后利用检测无人机判断是否在同一平面上,若不在,则同时根据两个定角去移动未知无人机的位置,直到都满足两个条件时完成定位。具体的操作如图3所示。
1.3 最佳控制的定位优化模型的建立
1.3.1 决策变量的确定
因为最开始确定一个平面的算法和后面定位其余无人机的算法都不相同,所以需要知道是无人机调整的第几阶段,其决策变量为:
1.3.2 目标函数的确定
由于需要给出无人机的调整方案,而无人机每阶段的方案又不同,且在无人机定位阶段需要考虑平面和立体的结构,故确定目标函数为计算每架无人机位于锥形编队的位置函数,记为:
1.3.3 约束条件的确定
约束条件1:无人机确定位置后,直线上距离限制由于是锥形编队,所以直线上相邻的2架无人机之间的距离相等。即:
lFT0iFY0i+1=lFT0i+1FY0i+2(i=1,2…13)(6)
约束条件2:无人机确定位置后,角度限制由于是锥形编队,所以直线上相邻的2架无人机之间的夹角相等。即:
∠lFT0iFY0i+1=∠lFT0i+1FY0i+2=60°(i=1,2…13)(7)
约束条件3:无人机确定位置前,移动限制由于需要调整无人机的位置,可能会碰撞上其他无人机,所以需要满足无人机在飞行过程中与其他无人机接收到的角度不同。即:
∠ni≠∠mj(i=1,2…15;j=1,2…15;i≠j)(8)
综上所述,建立基于最佳控制的定位优化模型:
2 模型求解
2.1 基于无人机的决策与最优控制模型
求解模型分为决策算法与最优控制算法两部分,需要给无序的无人机群编排队为锥形无人机群,且无人机之间只能通过接收信号形成的夹角来互相定位[1]。一共有15架无人机,且先定位的无人机都会影响到后面定位的无人机,记无人机定位的集合为P,可以表示为:
P={FY01,FY02…FY0n},n=15(11)
对无人机定位集合进行最优控制的调度算法,得到最优的调度方式。
步骤1:进行无人机平面的决策,采用最短优先调度算法,先定位一架无人机为FY01,再以最短优先算法搜索,其他无人机发射信号到FY01形成的角度最接近60°的两架无人机,后通过互相发射信号来调整无人机两两之间的角度为60°,命名为FY02和FY03,由此定位了一个基础的平面,记为P0。
步骤2:基础的平面P0定位完成后,就可以在此基础上通过P0上任意两架无人机发射信号来定位下一架无人机的位置[2]。如FY01和FY02发射信号可以定位3架新无人机,后FY01和FY03再发射信号,3架新无人机中最终收到的信號形成角度为30°的无人机才是在同一平面上的无人机,命名为FY04,以此类推,可以再定位3架无人机形成一个圆形编队,记为P1。
步骤3:在圆形平面P1上,除了FY04和FY06与FY05和FY07外,任意相邻的两架无人机也可以定位新的3架无人机,后只需让其中一架与FY01同时发射信号便可定位在同一锥形平面上的无人机,记为P2。
2.2 贪心算法和AHP层次分析法评价模型
2.2.1 建模的建立
将9架无人机均匀分布在某个圆周上,先确定圆的圆心和半径,通过数据分析,将圆心定位F0,半径可选择98 m或105 m两个同心圆,通过圆心,无人机和圆上3架无人机(即4架无人机)确定其他无人机预到达的位置。使其运动到满足对应的α1,α2,α3,α4,α5,α6角度关系,如图4所示。
由灰狼捕猎算法推导出调整方案,主要分为3个步骤。
步骤一:由圆上的已有3架无人机和圆心无人机,确定FY01运动到理想的位置上(R,0),此时一个圆上分布4架无人机。
步骤二:此时有圆上的已有无人机、F1无人机和圆心无人机,先后让已有3架无人机移动到理想的位置。
步骤三:圆上3架无人机和圆心无人机同时发射信号,让其他位置略有偏差的无人机移动到理想位置。最后建立一个层次分析法评价模型,对角度变化量、平均位移量、发射信号次数等多个指标进行分析,对变化方案,进行评价。
2.2.2 模型的求解
方向信息命名:编号0、编号1、编号2发射信号,编号3接收信号,其方向信息F12α3,1和F12α3,2分别表示两个夹角,即编号0。编号i、编号j发射信号,编号m接收信号,其方向信息表示为Fijαm,1和Fijαm,2;理想方向信息表示为Uijαm,1和Uijαm,2。编号n初始位置为Fn,运动位移为Vn,理想位置为Un,角度变化Pn(极坐标体系中极点为参考点)。
极坐标系的建立:选取F0,F1作为极轴建立极坐标系。
模型理想化:已知忽略运动时间且仅仅略有偏差,所以将无人机运动过程只取两点之间最短且无碰撞情况。
3 建立层次分析法的评价模型
通过比较98 m方案与112 m方案选择最小的变动方案。以无人机变化角度、位移量、发射信号次数作为指标,对方案进行评价。
3.1 无人机角度平均变化量β
满足式(12)的线性条件时,偏转角度越小,变动越小。并且,角度平均变化为:
3.2 各方案无人机位移变化量D
每个无人机位移变化计算公式:
无人机群位移距离D越小,变动越小。
3.3 信号发射次数γ
γ发射次数越少,能量消耗越少。由上面步骤可
知两个方案γ相同,并且γ1=γ2=7。
对方案变动值进行评价比较。评价指标确定后,需要确定评价方法以建立评价模型。评价方法主要分为主观评价法和客观评价法,这里采取主观评价法对问题进行深入分析,将问题分解为若干层次。然后在相对简单的层次上再进行分析,从而为多个目标或无结构的复杂问题提供简单的解决方法。分析3种指标的特点及其相对重要性,对指标进行两两比较获得判断矩阵,如表1所示。
AHP层次分析法用于研究专家打分权重计算。第一,AHP层次分析法用于计算权重,并且需要进行一致性检验。第二,逐一描述各项指标所得权重情况。
针对角度平均变化量、位移变化量和信号发射次数3项构建三阶矩阵进行AHP层次法研究,分析得到特征向量(0.772,1.485,0.743),并且,可得出3项对应的权重值分别是40%,50%,10%。
综上所述,选择将无人机均匀分布在半径为98 m的圆周上方案比较合理。
参考文献
[1]崔文冰.基于分布式的多无人机容错均匀编队算法研究[D].北京:北京化工大学,2021.
[2]都若尘,许江涛.多无人机协同编队控制研究现状及进展[J].高师理科学刊,2022(2):42-46.
(编辑 沈 强)
Modeling research on bearing only passive location of UAV
Li Wei, Shi Yifei*, Liu Kai
(Geely University of China, Chengdu 611731, China)
Abstract: In order to improve the effectiveness of drone formation flying, the current mainstream approach is to use passive localization with pure bearing for drone formation flying. This article is based on the Best Control Model (FHOCP) and decision algorithm to quickly and effectively determine the position of unmanned aerial vehicles in conical formations. By designing the optimal adjustment scheme, the problem is solved and analyzed.
Key words: assisted driving technology; unmanned aerial vehicle formation; the optimal control model; decision algorithm
