
基于Anybus X?gateway网关搭建三菱FX5U PLC与KUKA机器人网络
2023-07-19 09:04:12刘思远
化工自动化及仪表 2023年3期
摘 要 阐述在某智能制造产线上通过Anybus X?gateway网关实现三菱FX5U PLC和KUKA机器人互联的过程,包括硬件连接和参数配置,为自动化现场设备其他方式互联的实现提供参考。
关键词 数据交互 Anybus X?gateway CC?Link网络 EtherCAT网络
中图分类号 TP273 文献标识码 B 文章编号 1000?3932(2023)03?0343?05
作者简介:刘思远(1984-),讲师,从事PLC、变频器和伺服技术的系统设计与应用研究,190133384@qq.com。
引用本文:刘思远.基于Anybus X?gateway网关搭建三菱FX5U PLC与KUKA机器人网络[J].化工自动化及仪表,2023,50(3):343-347.
工业物联网和工业4.0已成为自动化领域不可逆转的趋势,这也使得工业现场越来越多的设备需要实现互联,不同工业网络之间也要实现通信连接。现场总线、工业以太网和无线网络是现场设备实现互联的主要桥梁。
HMS公司于1995年提出的Anybus产品概念——一种可接入任何网络的接口卡,可以解决系统集成过程中众多标准从站产品的接入问题[1]。Anybus X?gateway是网络到网络的网关,可实现CC?Link和EtherCAT两个网络之间的无缝内部连接,主要功能是在两个网络之间快速传输循环I/O数据。该网关在两个网络上都作为从站。数据传输是完全透明的,每个方向拥有最大数据容量512 Byte。该网关作为具有独立功能的子系统,通过原网络协议与控制系统进行通信,使工业现场设备能够交流和共享信息。
某智能制造产线的一个工作站采用FX5U PLC作为控制器、KUKA机器人作为工件的搬运机构,为了实现两种不同接口协议的三菱PLC和KUKA机器人的数据交互,选取HMS公司的新型网关Anybus X?gateway予以实现。
1 研究背景
1.1 系统介绍
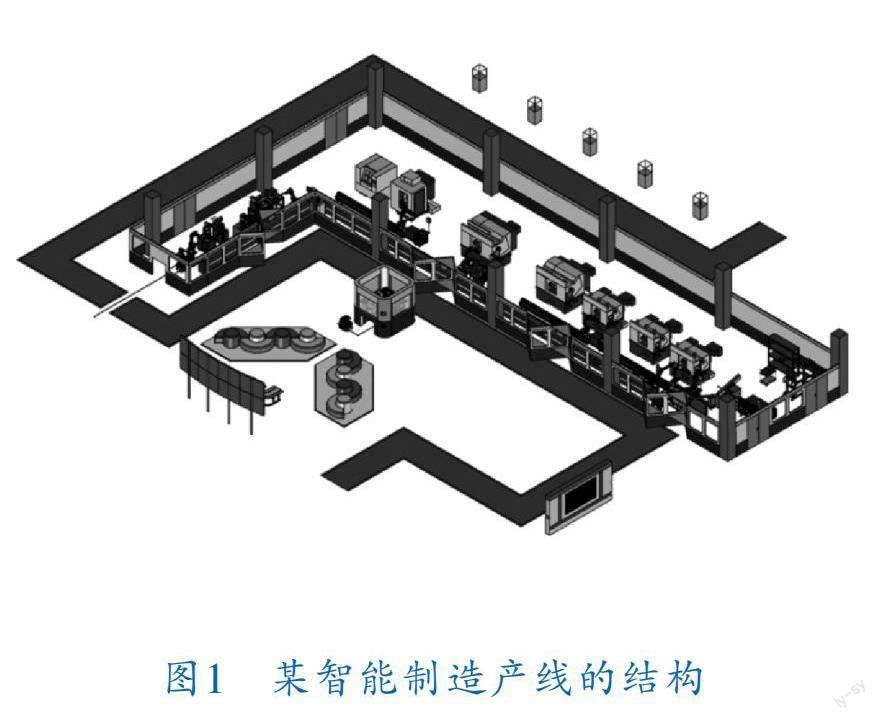
某智能制造产线的结构如图1所示,该产线由15个工作站组成,可以实现3大类别13种型号产品由原材料到成品入库的完整加工过程。生产流程为:MES下单→全体控制站领取并下发生产计划→原料切断、洗净→生产加工、刻印→产品检测→AGV小车运输入库等。同时,该产线还有严格的安全防护措施来保证各个工作站的正常运行。
1.2 工作站硬件说明
1.2.1 工作站机械结构
产线上第11号工作站的结构如图2所示,工作站主要由卡环压入区、轴承暂存区、工件送入区、电气控制柜及KUKA机器人等部分组成。主要在本站FX5U PLC的控制下,通过KUKA机器人的搬运,实现工件、卡环和轴承的组装与检测过程(图3)。
1.2.2 工作站主要电气部分
该工作站中主要选用的电气部件、软件及其型号见表1。控制器PLC选用三菱FX5U系列,配有通信模块FX5?CCLIEF,与产线上的主站实现CC?Link IE Field通信,通过FX5?CCL?MS模块与KUKA机器人和其他执行机构实现CC?Link通信。机器人选用KUKA的KR6系列小型六轴机器人,负载为6 kg,控制器为KR6 C4。
2 工作站网络结构
在工作站中,利用Anybus X?gateway网关搭建的网络结构如图4所示。Anybus X?gateway实现了PLC侧CC?Link网络和KUKA机器人侧EtherCAT网络的无缝连接,Anybus X?gateway网关在两个网络上都作为从站存在。
将网关、机器人、PLC用网线通过硬件连接后,需要在每个硬件的软件平台上分别进行配置才能完成网络的搭建。
3 网络搭建
网络的搭建主要有以下3个步骤:
a. 利用Anybus Config Manager X?gateway进行网关的配置;
b. 在work visual 4.0中进行网关接入KUKA机器人的配置;
c. 在GX?WORKS3中进行网关接入FX5U PLC的配置。
3.1 网关配置
给Anybus X?gateway供24 V电源后,即可在电脑上运行Anybus Config Manager X?gateway软件,利用USB线缆对网关进行相应的配置。需要设置CC?Link网络和EtherCAT网络的参数,如图5所示。设置完成后,将配置下载到网关即可。
3.2 KUKA机器人硬件和参数配置
该工作站选用的机器人控制器为KR6 C4 compact,此型号的控制器可以采用PROFINET、PROFIBUS、DeviceNet、Ethernet及EtherCAT等多种现场总线。
3.2.1 KUKA机器人侧通信接口
工作站中,KUKA机器人的控制器侧选用的是X65通信接口(图6),它是机器人控制系统之外的EtherCAT从属设备连接接口。
3.2.2 将网关接入KUKA机器人
运行work visual 4.0软件,先将网关的ESI描述文件导入其中,然后通过选择KUKA外接信号(KUKA Extension Bus(sys?x44))将网关模塊添加进去(图7),最后建立网关和机器人侧I/O地址的映射关系。
需要说明的是,由于KUKA机器人的I/O地址单元是BOOL型,网关I/O地址单元是USINT型,因此需要把机器人的8个BOOL单元组合成1个USINT单元来进行I/O映射。
3.3 FX5U PLC硬件和参数配置
3.3.1 PLC侧通信接口
工作站中,控制器的模块配置如图8所示,控制器通过模块FX5?CCL?MS与KUKA机器人通信。FX5?CCL?MS是作为CC?Link系统的主站或智能模块站而动作的智能功能模块,通过在主站中使用主站·智能设备站模块,能够以FX5U CPU模块构建CC?Link系统。在此系统中设置机器人站号为6,占用了3个站。
3.3.2 配置PLC侧CC?Link网络参数
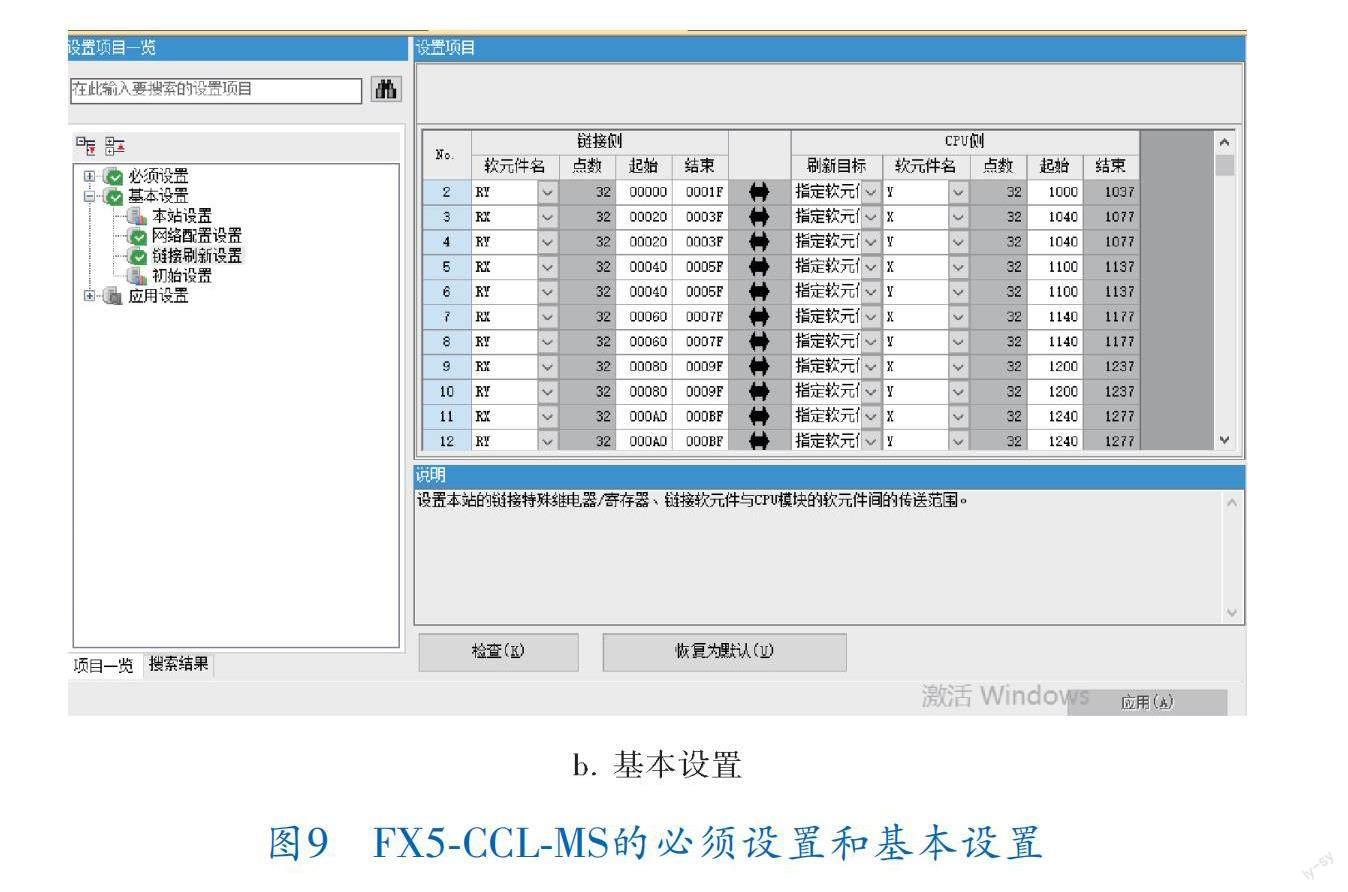
在软件GX?WORKS3中对FX5?CCL?MS进行必须设置和基本设置。必须设置包括站类型、模式及传送速度等,基本设置包括CC?Link配置和链接刷新设置,如图9所示。设置完成后,需要将项目下载到PLC中。
4 仿真验证
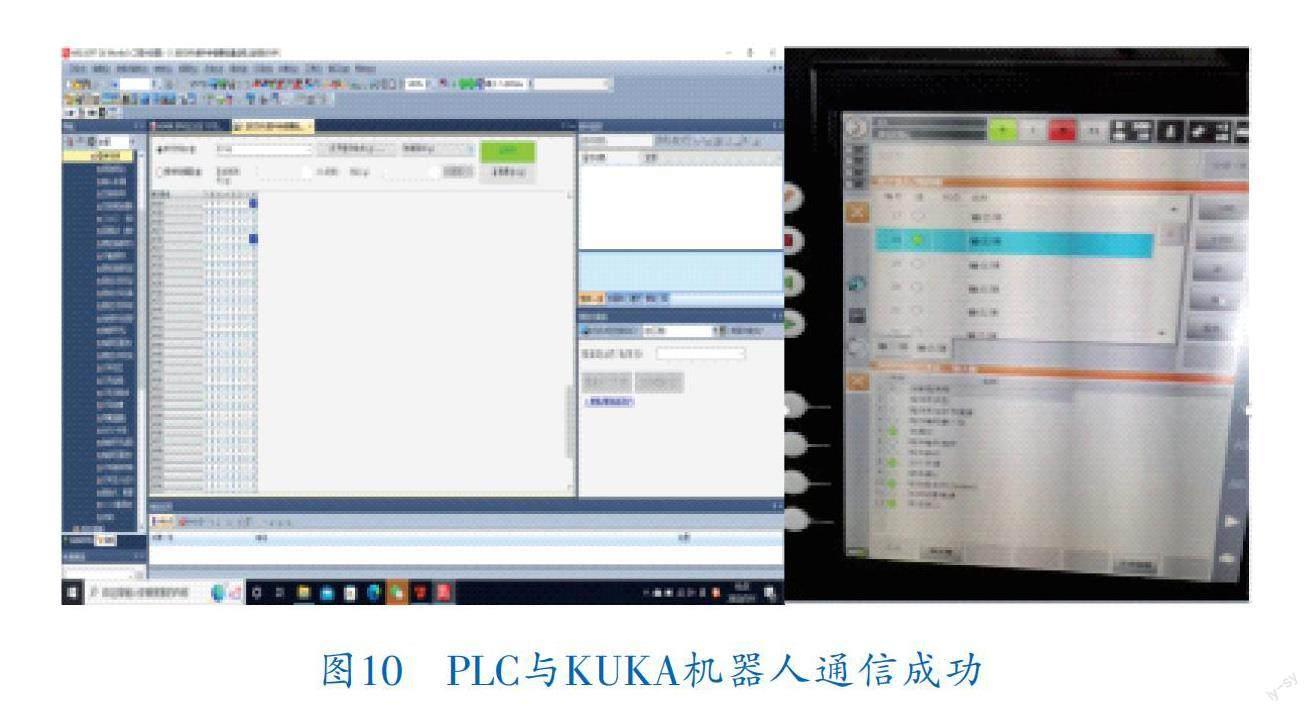
完成了上述设置后,在GX?WORKS3打开软元件监视界面,设置起始地址为X1241,在KUKA机器人的操作面板上设置输出端18信号有效,并发送数据。此时,可以看到X1241信号已经得电,证明PLC与KUKA机器人通信成功(图10)。
5 结束语
多种工业网络标准共存是短时间内难以改变的事实,这就要求相关技术人员具备高效互联的能力。笔者搭建了一种利用Anybus X?gateway网关实现两种工业现场广泛被使用的以太网协议进行通信的网络结构,通过在控制器上的仿真,验证了该网络的可行性。Anybus X?gateway网关可缩短开发周期,具有较强的推广应用价值。
参 考 文 献
[1] 李正军,李潇然.现场总线与工业以太网[M].北京:中国电力出版社,2018.
(收稿日期:2022-07-12,修回日期:2022-10-13)
Constructing the Network between FX5U PLC and KUKA Robot Based on Anybus X?gateway
LIU Si?yuan
(Suzhou Vocational Technical School )
Abstract Realizing the interconnection between FX5U PLC and KUKA robot based on Anybus X?gateway on an intelligent manufacturing production line was expounded, including hardware connection and parameter configuration to provide reference for other ways of interconnection of the auto?equipment.
Key words data interaction, Anybus X?gateway, CC?Link network, EtherCAT network
