基于激光雷达的高速公路车辆外轮廓测量系统设计分析
2023-07-18 12:51:27王宁昌潘洪强韦维
西部交通科技 2023年4期
关键词:激光雷达
王宁昌 潘洪强 韦维


摘要:在高速公路入口,动态测量即将驶入高速公路车辆的长宽高信息,对车辆实行的超限拒入,对高速公路运维养护有重要意义。文章设计了三种基于激光雷达动态对车辆外轮廓信息进行测量的方案,并对方案的系统架构和程序进行详细介绍,从安装成本、使用效果、施工实施限制等角度分析比较了各方案的利弊,为项目实施提供方案参考,以打造智慧高速公路。
关键词:智慧高速公路;激光雷达;车辆外轮廓测量;入口治超
中图分类号:U495A571904
0引言
随着全国高速公路的建设和发展,高速公路运营安全及养护变得越来越重要。非法超载超限货运车辆在行驶过程中,直接加速了高速公路设施、桥梁、涵洞与路面的损坏,增加了交通事故发生的概率,这已经变成了影响交通行业发展的障碍。为了杜绝车辆超限超载,全国陆续启动高速公路入口称重检测系统和外轮廓测量系统,违法超限超载货运车辆将禁止驶入。根据交通运输部发布的《关于进一步规范高速公路入口治超工作的通知》,全面推行高速公路入口检测、出口倒查、责任追究和信用治理,坚决遏制违法超限超载运输,保障高速公路安全、畅通、高效运行。车辆外轮廓测量系统负责动态快速准确地测量车辆的长宽高信息,配合地磅称重设备、车辆轮轴识別设备和车辆车牌识别设备一起,提供车辆的重量信息,车轴信息、车辆长宽高信息、车牌信息,为实行超限拒入提供了执法依据,能更好地保障高速公路的安全、畅通、高效运行,有效地减少高速公路交通安全事故率,延长高速公路寿命,降低人力成本和养护成本。
激光雷达具有抗干扰能力强,响应速度快,测量精度高等优点,采用激光雷达对车辆轮廓尺寸进行检测,能满足高速入口测量的准确性和实时性。采用多激光雷达配合,能同时测量车辆的三维信息,检测精度能达到1 cm,检测速度快,能在车辆离开测量区域100 ms内输出测量结果。车辆外轮廓测量系统通过网络以json格式输出测量结果,能方便地接入各收费平台系统。
1系统功能要求
激光雷达车辆外轮廓测量系统能够实时精确地测量车道上通过车辆的长度、宽度和高度信息。其采用性能优良的工业级处理器与嵌入式实时操作系统,系统稳定可靠;支持实时数据传输;具备来电自动恢复以及数据断点续传能力;具备故障自动检测以及实时上报功能;在雾、雨、雪天气下能稳定运行;采用动态跟踪算法,对车辆目标连续实时测量,车辆离开测量区域即刻输出测量信息,方便快速;配置简单,部署方便;能够适应多种收费站站前广场的场景。
2硬件方案设计
激光雷达车辆外轮廓测量系统由一个或两个负责测量车辆宽高信息的激光雷达a、一个负责测量车辆长高信息的激光雷达b以及一个测量主控单元组成(见图1)。激光雷达与测量主控单元通过RS485总线连接,采用屏蔽双绞线,具有良好的抗噪声性能、较长的传输距离和较快的速率。测量主控单元通过RJ45与治超系统相连,只需要配置IP与端口信息,即可将数据接入治超系统,调试和部署极为方便。
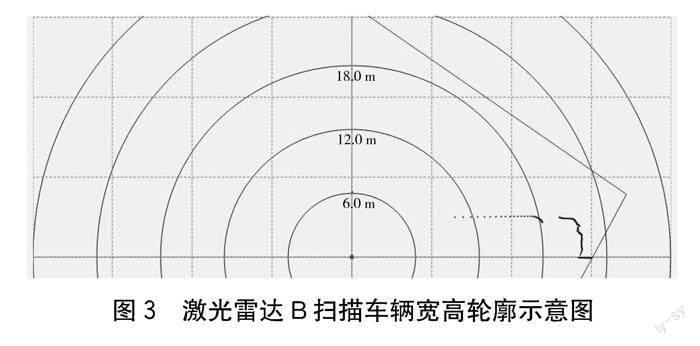
激光雷达安装在称重车道的L杆或门架上。激光雷达A负责采集车辆行进方向垂直截面上的轮廓信息(图2),激光雷达B(图3)负责采集车辆行进方向截面上的轮廓信息,测量主控单元可根据需要,安装在L杆的立杆上或治超系统的机柜和机房里。
激光雷达输出的实时点云数据传到测量主控单元,主控单元对点云数据进行坐标变换处理,检测出车辆目标,对车辆目标进行实时跟踪,将测量的高度宽度信息和高度长度信息匹配后,生成车辆外轮廓的测量信息,通过网口输出到治超系统,治超系统汇总车辆重量、车轴、车牌、车辆长宽高信息后,在显示屏给出允许通行或拒绝驶入的信号[1]。
在激光雷达选型方面,考虑到激光雷达在室外工作时夏天阳光照射,冬天冷冻结冰,所选择的激光雷达需要有很宽的工作适应温度范围,同时要支持扫描窗口加热去雾以减少扫描窗口遮挡对扫描结果的影响。根据测量精度要求,需选择角分辨率小、扫描角度大、扫描帧率高的激光雷达,以达到厘米精度的测量结果;基于驾驶员安全,需选择在不可见光频段工作且对人眼安全的激光雷达。
另外,在施工方案上,除了要考虑新建的或正在改扩建的具有站前广场的收费站,还要考虑已有的老旧收费站,尽量在不影响原有收费系统的情况下,复用L杆、门架等基础设施,让施工安装配置更简单。
3软件方案设计
本系统采用管道流水线的架构风格,雷达数据接收线程负责接收雷达数据,目标识别线程负责将点云数据转换成跟踪目标信息,目标跟踪线程负责目标跟踪和匹配,结果输出线程将车辆测量结果封装成json数据格式输出到治超系统,如图4所示。
系统接收到激光雷达的点云数据后,以地面作为背景,对每帧数据进行比较,过滤变化率小的点,余下的点即为车辆目标,将目标点云与雷达安装参数进行转换计算,即得到目标的高度和宽度。在车辆驶入方向,获得车辆的长度和高度信息,在车辆驶入截面方向,获得车辆的宽度和高度信息,如图5所示。
获取车辆目标后,分别对两个方向的目标进行跟踪,对连续5帧符合条件的目标,建立跟踪信息,跟踪信息记录每帧目标的高度和宽度信息;对连续5帧不符合条件的目标,视为车辆驶离。此时,将两个截面的跟踪信息,用高度进行匹配,得到车辆最大的长宽高结果[1],见下页图6。
4现场实施方案
参照总体方案设计和现场条件,给出了双雷达单杆方案、三雷达单杆方案和三雷达双杆方案。每个方案在具体的实施场景中都有各自的成本优势、测量精度和场景适应性优势,可根据项目需求,因地制宜地选择合适的方案,能取得更好的效果。
4.1双雷达单杆方案
该方案将激光雷达A和激光雷达B交叉安装在L杆中间的位置,激光雷达A扫描称重车道内车辆行进方向的垂直截面,激光雷达B扫描车道中心车辆行进方向截面,测量主控单元安装在L杆立杆上,激光雷达与主控单元的RS485接线走L杆内部,有较好的防水防尘效果。主控单元与治超系统连接的RJ45走L杆电源管线的线路。测量时,激光雷达A扫描称重车道内车辆行进方向的垂直截面,检测到车辆目标后,建立车辆跟踪任务,在车辆驶入驶出雷达扫描区域的过程中,逐帧更新跟踪车辆的宽度信息和高度信息。激光雷达B扫描车道中心车辆行进方向截面,检测到车辆目标后,建立车辆跟踪任务,在车辆驶入驶出雷达扫描区域过程中,逐帧更新跟踪车辆的长度信息和高度信息。主控单元根据跟踪目标的高度,匹配激光雷达A和激光雷达B的车辆跟踪结果,当激光雷达B的车辆跟踪离开雷达扫描区域中心点时,即为车辆离开门架的时间。此时,主控单元将匹配的车辆的最大的长宽高结果发送到治超系统,完成车辆测量,如图7所示。
该方案可以在现有的收费车道基础设施上加装设备,无须加装L杆,在老旧的收费站和没有站前广场的收费站上,可直接复用原来监控相机的L杆和管道基础设施,在成本上有较大的优势。但是,由于激光雷达安装在车辆的顶部,激光雷达只能扫描到车辆的顶面轮廓信息,故在测量准确度上会有所缺失,车辆后视镜容易被顶面遮挡而无法测量,造成宽度、长度偏小。
4.2三雷达单杆方案
三雷达单杆方案在双雷达单杆方案的基础上,增加了一个扫描称重车道内车辆行进方向垂直截面的激光雷达A,两个激光雷达A分别安装在L杆车道上方的两侧,共同扫描车辆行进方向的垂直截面;激光雷达B仍安装在L杆中间位置,扫描车辆的行进方向截面。测量时,先融合两个激光雷达A的点云数据,组成在车辆行进方向垂直截面的扫描信息,检测到车辆目标后,建立车辆跟踪任务,在车辆驶入驶出雷达扫描区域过程中,逐帧更新跟踪车辆的宽度信息和高度信息。激光雷达B扫描车道中心车辆行进方向截面,检测到车辆目标后,建立车辆跟踪任务,在车辆驶入驶出雷达扫描区域过程中,逐帧更新跟踪车辆的长度信息和高度信息。主控单元根据跟踪目标的高度,匹配激光雷达A和激光雷达B的车辆跟踪结果,当激光雷达B的车辆跟踪离开雷达扫描区域中间点时,即为车辆离开门架的时间。此时,主控单元将匹配的车辆的最大的长宽高结果发送到治超系统,完成车辆测量,如图8所示。
該方案在车辆行进的垂直方向上增加了激光雷达,能扫描到车辆两侧轮廓和顶面的轮廓,故相较于双雷达方案,在宽度上有更好的精度,同时也有较低的施工成本和施工改造难度,但还存在长度、精度的问题。故在有较高精度要求且在基础设施无法改扩建的条件下,可以选用。
4.3三雷达双杆方案
三雷达双杆方案在单杆方案的基础上,增加安装了一个L杆,将激光雷达分别安装在两个L杆上,用于解决测量长度精度的问题。两个激光雷达A安装在前L杆车道两侧,扫描车辆行进方向的垂直截面;激光雷达B安装在后L杆中间扫描车道行进方向截面。测量时,先融合前L杆上两个激光雷达A的点云数据,组成在车辆行进方向垂直截面的扫描信息,检测到车辆目标后,建立车辆跟踪任务,在车辆驶入驶出雷达扫描区域的过程中,逐帧更新跟踪车辆的宽度信息和高度信息。后L杆激光雷达B扫描车道中心车辆行进方向截面,检测到车辆目标后,建立车辆跟踪任务,在车辆驶入驶出雷达扫描区域的过程中,逐帧更新跟踪车辆的长度信息和高度信息。主控单元根据跟踪目标的高度,匹配激光雷达A和激光雷达B的车辆跟踪结果,当激光雷达A的跟踪消失时,即为车辆离开前L杆的时间。此时,匹配激光雷达A的高度信息和宽度信息,将两个L杆的安装间距减去测长跟踪车头位置坐标,即得出实际的车长。主控单元将匹配的车辆的最大的长宽高结果发送到治超系统,完成车辆测量,如图9所示。
该方案能准确地测量车辆的长宽高信息,但由于需要安装两根L杆,需要在新建设的、有站前广场的收费站安装。同时,增加的L杆也带来了额外的安装成本并增加了施工配置难度,故在成本允许的条件下,可以选用该方案进行车辆外轮廓尺寸的测量。
5结语
本文根据高速公路入口治超对车辆长宽高信息进行不停车动态实时测量的需求,从硬件角度、软件角度、现场实施的角度分析与设计了多套可行方案,分析了使用激光雷达进行测量的优势,并从成本、施工难度等角度提供了项目建设和选型建议,为高速公路的运维管理提供便利,为高速公路的养护提供保障,为智慧高速公路建设提供支持。
参考文献
[1] 庞正雅,周志峰,王立瑞,等.基于激光雷达的运动补偿方法[J].激光与光电子学进展,2020,57(2):221-228.
基金项目:中央引导地方科技发展专项“广西智慧道路机电系统新技术综合平台建设”(编号:桂科ZY20111015)
作者简介:王宁昌(1986—),工程师,研究方向:智慧高速信息系统。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
中国交通信息化(2021年8期)2021-11-02 05:26:02
汽车观察(2021年8期)2021-09-01 10:12:41
空间科学学报(2020年6期)2020-07-21 05:36:50
甘肃科技(2020年21期)2020-04-13 00:33:38
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子测试(2018年22期)2018-12-19 05:12:08
电子制作(2018年16期)2018-09-26 03:27:00
中国交通信息化(2018年7期)2018-09-14 02:55:02
光学精密工程(2016年1期)2016-11-07 09:01:49