基于Landsat像元级时间序列的海岸带盐沼植被分类
2023-07-14 14:50郑嘉豪孙超林昀李璐刘永超
遥感学报 2023年6期
郑嘉豪,孙超,2,3,林昀,李璐,刘永超,2,3
1.宁波大学 地理与空间信息技术系,宁波 315211;
2.宁波陆海国土空间利用与治理协同创新中心,宁波 315211;
3.宁波大学 东海研究院,宁波 315211;
4.宁波市测绘和遥感技术研究院,宁波 315042
1 引言
盐沼植被是生长在海岸带的、间歇性被海水淹没的草本植被,一般分布于温带至亚热带河口或海岸(牛振国 等,2012)。盐沼植被是地球上最具价值的生态系统之一,提供了诸如促淤护岸、营养循环、废污净化、生物庇护等多种生态功能(Minello 等,2012)。然而,近些年来全球气候变化及人类活动影响导致了盐沼植被处于持续演替和消亡之中(侯西勇 等,2018)。例如,作为海岸带空间资源利用主要方式,中国近20 年滩涂围垦面积逾2800 km2,直接或间接导致自然湿地面积锐减(王宗明 等,2009;毛德华 等,2016;Li 等,2020)。此外,外来物种入侵也使得本土盐沼植被的生存空间不断减少(张健 等,2019)。自1979年引入外来物种互花米草以来,其在中国海岸带上扩张超过340 km2(Zuo 等,2012),由于其较高适应性和繁殖性,互花米草与中国本土盐沼植被激烈竞争,不断改变着海岸带整体景观格局(孙超 等,2015)。因此,及时、准确监测盐沼植被的物种组成和空间分布对于合理高效开发利用海岸带资源,推动海岸带高质量建设具有重要意义。
相比抵近困难、成本高昂的实地调查,遥感凭借覆盖范围大、可重复性观测等优势日益成为海岸带资源调查的主要方式(李清泉 等,2016)。不同种类的光谱特征差异或者物候特征差异使得通过遥感影像分类成为可能(Sun 等,2020;刘瑞清 等,2021)。早期研究多采用单一时相影像监督分类方式识别盐沼植被(李婧 等,2006;侯西勇和徐新良,2011)。但是由于“同物异谱,异物同谱”现象,采用中等空间分辨率光学影像分类效果并不理想。而后,部分研究采用高空间或高光谱分辨率影像分类盐沼植被,在很大程度上保证了分类精度(程乾 等,2016;李喆 等,2016;任广波 等,2015)。但由于影像成本较高、获取困难,以上方式仅适用于小范围的盐沼植被调查,很难用于大范围盐沼植被监测。
随着多源遥感影像不断积累,部分学者开始尝试构建时间序列方法进行海岸带资源遥感监测(陈高 等,2022;Ai等,2017;Hu 等,2021;Sun等,2016)。起初,时间序列构建主要围绕高时间分辨率的遥感影像(MODIS NDVI/EVI、SPOT VGT等)开展(Zhao 等,2009;李加林,2006)。然而,彼时高时间分辨率影像的空间分辨率较低,很难适用于空间分布范围狭长且异质性较强的盐沼植被区域。近些年,学者们逐渐利用空间分辨率与时间分辨率较于前者有所提升的影像构建时间序列,探讨盐沼植被分类可能性。例如,Sun 等(2016)采用HJ-1影像(时间分辨率:2 d)构建月度NDVI时间序列来对盐沼植被识别与分类。Ai等(2017)采用构建GF-1 影像(时间分辨率:4 d)时间序列对长江口滨海湿地的互花米草制图。Hu 等(2021)采用Sentinel-1 影像(时间分辨率:12 d)构建时间序列数据绘制分辨率为10 m 的中国沿海湿地植被分布图。刘瑞清等(2021)结合Sentinel-2(时间分辨率:2 d)时间序列和植被物候特征,进行了盐城滨海湿地植被精细分类。Li 等(2019)采用了Sentinel-2 影像构建的时间序列模型进行了红树林分布制图。值得注意地是,部分时间序列方法通过挑选整景无云覆盖影像构建(称为影像级时间序列),由于海岸带云雨天气出现的随机性,上述方式在特定时期的适用性是否具备向其他时期扩展存在一定不确定性。
考虑到长时期变化监测,Landsat 系列卫星自1972 年运行以来,提供了半个世纪的对地观测数据,具备持久的对地观测周期和广泛的应用基础(Zhu 等,2019)。此外,在1999 年后,Landsat 系列卫星双星同时运行(TM 和ETM+,ETM+和OLI)也使得对地观测的时间分辨率由16 d 提高为8 d(Jones 等,2013)。然而,海岸带云雨天气频发,加之ETM+的条带现象,导致特定时期收集足够的无云覆盖影像仍较为困难。因此,研究尝试收集全部影像,通过云掩膜数据(Zhu 和Woodcock,2012)逐像元甄别每景影像中无云覆盖的有效信息,构建一种像元级时间序列。在此基础上,探讨像元级时间序列方式对盐沼植被精细识别的适用性和稳定性,以期服务于海岸带盐沼植被长时期、大范围动态监测工作。
2 研究区与数据源
2.1 研究区
研究区来自长三角典型滨海湿地区域,包括江苏省丹顶鹤自然保护区、上海市九段沙湿地以及浙江省杭州湾南岸湿地3块。
丹顶鹤自然保护区(33°30'N—33°39'N,120°30'E—120°41'E)位于江苏省盐城市斗龙港与新洋港之间海岸(图1),被认为是中国保留较为完好的盐沼湿地之一。1194 年—1855 年古黄河在江苏入海,为该区域带来了大量的沉积物,现今形成了宽广的淤泥质海岸。该区域本土盐沼植被主要包括白茅、芦苇、碱蓬等。外来物种互花米草自1979 年被引入后迅速蔓延成为该区域又一主要盐沼植被类型(孙贤斌和刘红玉,2010;左平 等,2012)。

图1 研究区地理位置及其盐沼植被样本分布Fig.1 Distribution of study sites and salt marsh vegetation samples
九段沙湿地(31°03'N—31°17'N,121°46'E—122°15'E)位于长江河口外南北两槽中(图1),由长江入海携带的泥沙不断堆积而迅速发育扩大。该区域的本土盐沼植被主要包括芦苇和海三棱藨草(田波 等,2008)。1990 年代后上海市开展生态工程,在九段沙湿地栽种互花米草,而后互花米草快速扩张与本土物种激烈竞争,取代部分海三棱藨草和芦苇(黄华梅 等,2007)。
杭州湾南岸湿地(29°91'N—30°45'N,121°4'E—121°18'E)位于浙江省宁波市北岸(图1),属于中国八大盐碱湿地之一。该区域地处河流和海洋的交汇区,持续的沉积物输入使得潮间带发育优良,其上广泛分布着芦苇、海三棱藨草和互花米草等盐沼植被(李侠 等,2007)。此外,杭州湾南岸湿地滩涂围垦频发,滩涂围垦导致盐沼植被群落结构和景观处于不断变化之中。
2.2 数据集
研究使用的遥感影像数据包括Landsat 7 ETM+和Landsat 8 OLI,通过美国地质调查局USGS EarthExplorer 网 站(https://earthexplorer.usgs.gov/[2022-09-08])下载。我们下载覆盖3 块研究区2018 年和2019 年全部Landsat Collection 2 Level-2(C2L2)影像产品共计271 景,其中,丹顶鹤自然保护区(119/37)91 景(2018 年45 景,2019 年46景),九段沙湿地(118/38)90景(2018年45景,2019年45景),杭州湾湿地(118/39)90景(2018年45 景,2019 年45 景)。C2L2 影像产品提供了经过几何校正、辐射定标、大气校正等预处理后的地表反射率数据,同时提供了质量评估QA(Quality Assessment)波段可用于逐像元评估成像质量状况。在研究中,2018 年的影像产品主要用于建立时间序列分类方法,进行盐沼植被分类和精度验证;2019 年的影像产品主要用于分类方法稳定性和可移植性评估。
研究使用的样本数据通过野外实测、无人机遥测和Google Earth 目视解译3 种方法获得,共计1493 个(Sun 等,2021)。野外实测于2018 年4 月6 日至11 月29 日开展,总共调研15 次(3 个研究区各5 次),主要调查盐沼植被分布,选取对应地面范围超过60 m×60 m 的、单一植被类型覆盖的样本区域记录,共获取实测样本点166个。在实地调查的同时(2018 年4 月6 日至11 月29 日)进行无人机遥测,以获得抵近困难地区盐沼植被分布信息,利用大疆无人机(型号:DJI M600),在航高50 m的条件下获得样本点369个。由于野外实测和无人机遥测收集的样本有限,研究另通过Google Earth 目视解译获取额外样本。研究共选取4 景Google Earth 历史快视图——2018 年5 月4 日位于丹顶鹤自然保护区,2018 年4 月30 日—7 月13 日位于九段沙湿地,2018 年3 月13 日位于杭州湾南岸湿地,共解译样本点958 个。以上样本通过ArcGIS 软件中Random Points 工具随机生成,在样本解译过程中,除了盐沼植被外,加入了滩涂和水体样本以保证后续盐沼植被分类体系完整。最终,研究获取丹顶鹤自然保护区样本595个、九段沙湿地样本444 个、杭州湾南岸湿地样本454 个(图1)。各区域的样本点均分,一半用于模型训练,一半用于模型测试(图1)。
3 研究方法
研究区内不同类型盐沼植被具有明显的物候差异,例如,芦苇的生长期更早,互花米草的衰亡期更晚,海三棱藨草的物候峰值更低等,相关内容已在前期研究中详细论述(Sun 等,2016,2020;刘瑞清 等,2021)。本研究更加关注如何充分利用可用影像信息,构建像元级的时间序列的盐沼植被分类模型,总体思路如图2 所示。首先,相对定标多源影像,减少地表反射率差异,为高质量构建时间序列奠定基础;其次,逐影像筛选可用像元,构建像元级时间序列模型,保证时间序列观测数量;最后,构建XGBoost分类模型,充分应对像元级时间序列稀疏、不对等的特性,获取盐沼植被空间分布。

图2 基于Landsat像元级时间序列盐沼植被分类流程Fig.2 Flow chart of salt marsh classification mapping using the pixel-level based time-series constructed by Landsat imagery
3.1 多源影像相对定标
Landsat 8 OLI 在大气校准与信噪比方面的改进、在辐射分辨率与光谱波段配置方面的优化,使其与Landsat 7 ETM+存在一定差异。因此,研究参照Roy等(2016)提出的波段相对定标参数,将ETM+地表反射率与OLI 地表反射率配准。为了规避春秋两季植被物候快速变化的影响,Roy等选取了位于夏冬两季的、时间间隔仅为1 d 的Landsat 8 OLI 和Landsat 7 ETM+影像对,采用普通最小二乘回归法建立了该定标模型。由于该定标模型效果好、鲁棒性高的特点,近些年在多源Landsat 影像定标工作中已被广泛应用(Liu 等,2020;Reiche等,2018;Zhu,2017)。
3.2 像元级时间序列构建
研究采用Jiang 等(2008)提出的基于红光和近红波段的EVI 指数计算方法,即EVI2(Enhanced Vegetation Index 2)。相较于常用的归一化差异植被指数NDVI,EVI2 充分考虑了大气噪声、土壤背景、数值饱和等问题,能够更好地反映出盐沼植被生长状况的差异。基于相对定标后的Landsat影像产品,EVI2计算公式如式(1)所示:
式中,ρnir和ρred分别为近红外波段和红光波段的地表反射率。
研究利用QA 波段筛选EVI2 影像中的有效像元。QA 波段像元与影像数据像元一一对应,每一像元用2 字节16 位详尽表示对应影像数据像元成像时的地表、大气和传感器状况。由于原始QA 波段信息记录较为复杂,研究利用USGS 提供的Quality Assessment Tool 工具(Jones 等,2013)对原始QA 波段解码,直观表达成像质量情况。解码后的QA 波段以整型数值0—5 分别对应填充、清晰、水体、云、雪和云阴影情况。研究将数值对应3—5 的EVI2 像元剔除,规避云(雪)覆盖的影响;考虑到填充像元多对应Landsat 7 ETM+条带区域,研究也将数值对应0 的EVI2 像元剔除。即仅将解码后QA 波段数值对应为1 和2 的EVI2 像元视为有效观测予以保留。
在此基础上,按照影像成像时间先后顺序将EVI2 影像排序构建像元级时间序列。相比于影像级时间序列,研究提出的像元级时间序列显著提高了有效观测数量(图3)。例如,在2018 年构建的像元级时间序列中,丹顶鹤自然保护区、九段沙湿地和杭州湾南岸湿地的平均有效观测数量为18.7 次、15.0 次和11.4 次,2—3 倍多于影像级时间序列(8 次、5 次和5 次)(图3)。更为重要地是,像元级时间序列中有效观测数量的季节性分布较为均衡,而不像影像级时间序列中有效观测数量季节性波动巨大,这也有利于保证像元级时间序列应用的稳定性。需要注意的是,尽管像元级时间序列提高了有效观测数量,但是各个研究区平均有效观测数量仍明显少于总体观测数量(365/8≈45 次)的一半(尤其是杭州湾南岸湿地仅为总体观测数量的1/4),即像元级时间序列是稀疏的。此外,由于海岸带区域云雨覆盖和潮水淹没的随机性,导致像元级影像时间序列像元间的有效观测分布不对应,数量也不相等,即像元级时间序列存在非对等性。这种稀疏、非对等的像元级时间序列对后续的分类算法提出了较高要求。

图3 2018年基于像元级时间序列的有效观测空间分布及其按季度统计的有效观测数量Fig.3 Spatial distribution and seasonal statistics of the number of the valid observations from pixel-level based time-series in 2018
3.3 XGBoost分类
研究利用XGBoost(极限梯度提升)算法进行像元级时间序列分类。XGBoost 算法由Chen 和Guestrin(2016)提出,本质为梯度提升决策树,利用贪婪算法与近似算法确定树模型。具体来说,在XGBoost算法建树时,首先计算真实值和预测值的差值——残差值(Residuals)。在此过程中,真实值已知,预测值则由XGBoost算法通过遍历样本优化给定。依据不同分割点的残差值测算每个根节点与其所含叶子节点的相似度(Similarity Scores),以各叶子节点相似度之和与该根节点相似度的差异定义收益值(Gain)。最终,XGBoost算法以收益最大的分割点建立叶子节点,以此迭代进行模型树生长。由于具备运算高效、灵活性强、预测精准、便于并行计算等特点,近些年XGBoost 算法在地理信息挖掘、图像模式识别领域得到广泛应用(Liang等,2022;Tian等,2022)。
XGBoost 算法的突出优点是针对样本数据缺失现象开发的稀疏感知分裂查找算法。在训练阶段,在确定某一特征最佳分裂点时,XGBoost 算法将数据完整与数据缺失记录分离,首先遍历对应特征数据完整的样本,保证分裂准确并减少计算开销。对于数据完整的样本,算法将数值大小进行顺序排列,将相邻顺序数值的均值作为不同分割点,并将数据完整样本的残差值分别放至根节点左右两侧叶子节点中。在此基础上,由于XGBoost算法的初始类型预测值已知,缺失数据类型真实值已知,可得到缺失数据样本的残差值。进一步,将缺失数据样本的残差值分别放入左右两侧叶子节点中,计算不同分割点下,左右叶子节点获得的最大收益,选取收益最大时分割点并确定对应特征缺失数据时的默认方向(图4)。在预测阶段,对于某一特征数据缺失样本,若对应特征在训练阶段出现缺失值,则按照训练阶段确定的默认分配方向进行划分;若对应特征在训练阶段没有出现缺失值,则将其划分到左子树方向(XGBoost 算法默认值),以此解决样本数据缺失问题。XGBoost 算法有效解决了常规距离度量算法(如K邻近、支持向量机)难以用于缺失值分类的问题(Song和Yu,2021;Xi等,2018;Zhang等,2020);同时,相比于采用中位数替换(或加权替换)方式处理缺失值的随机森林算法,XGBoost 算法预测准确且运算高效(Van Beijma等,2014)。
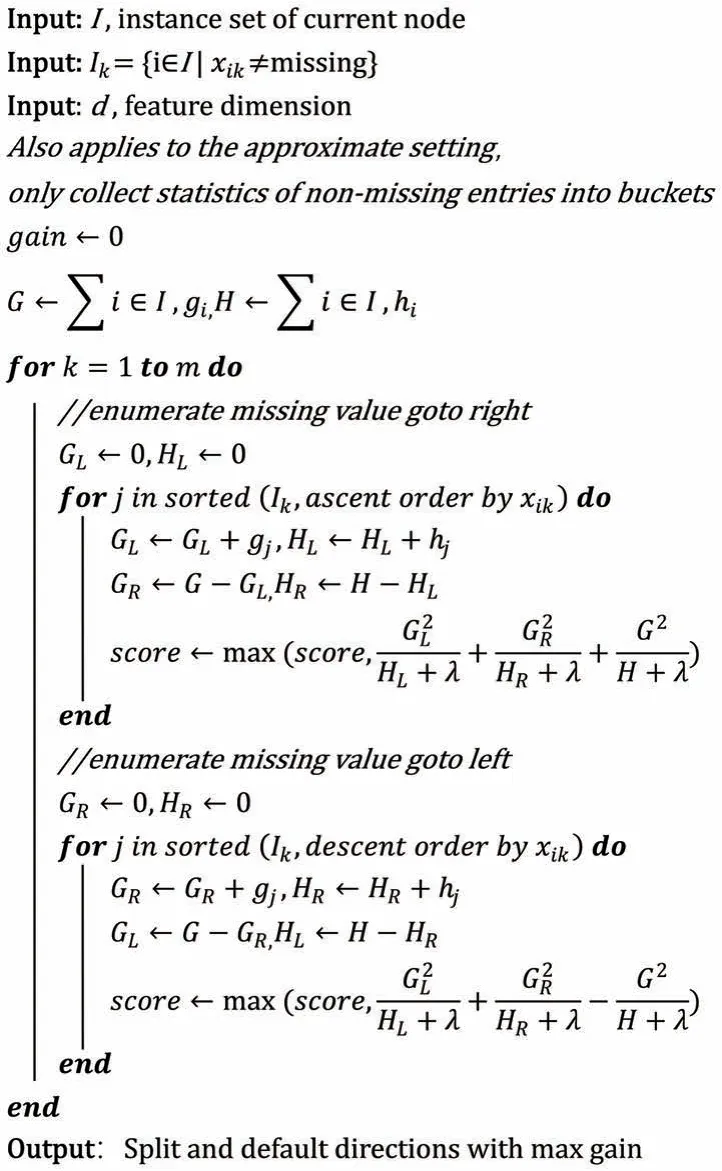
图4 XGBoost算法处理缺失数据策略Fig.4 The process of XGBoost algorithm dealing with missing data
研究调用Python 中的XGBoost 程序包实现像元级时间序列盐沼植被分类。具体参数设定如下:分类模型为归一化指数函数(softmax),分类数为各个区域的分类数量,建树迭代步长(eta)为0.1,随机采样的比例为0.5%—50%的样本数据用于训练,剩下50%的样本数据用于精度验证。考虑到不同采样对分类结果的影响,研究重复随机采样100 次,以分类精度与100 次随机采样平均精度接近的分类模型计算混淆矩阵,以公正评估分类结果。除此之外,其他参数(如gamma、max_depth、subsample、colsample_bytree)均参考文档的默认值设置。
4 结果
4.1 定标效果分析
研究选取了冬季(12 月—次年2 月)成像时间相差8 d 的无云覆盖Landsat 7 ETM+和Landsat 8 OLI影像对,比较定标前后影像对的各个波段(蓝光、绿光、红光、近红外、短波红外1和短波红外2)和EVI2 在各类盐沼植被样本上(若样本落入Landsat 7 ETM+条带中则剔除不予统计)的差异。研究认为在冬季盐沼植被多已衰老枯萎,在8 d 内影像对各个波段和EVI2的数值差异应该尽可能小,以此度量多源影像定标效果。图5展示了在每一个波段(包括EVI2 指数在内共7 个)各盐沼植被的波段反射率差异。对于互花米草、碱蓬、芦苇和海三棱藨草,定标后所有波段的平均绝对值差异都有所减小(图5),尤其在近红外波段:互花米草、碱蓬、芦苇、海三棱藨草的平均绝对值差异分别减小了0.78×10-2、1.43×10-2、1.3×10-2、0.56×10-2(图5)。对于白茅,定标后在蓝光、近红外、短波红外1 和短波红外2 波段的平均绝对值差异减小(平均减小0.68×10-2),但在绿光和红光波段的平均绝对值差异增大(图5)。进一步分析发现,在影像对中白茅集中分布的位置出现了QA 波段检测出错的薄云,可能是导致定标前后平均绝对值差异波动的原因。尽管如此,在用于像元级时间序列构建EVI2 上,各类盐沼植被定标后的平均绝对值差异下降明显——芦苇减小了0.032,海三棱藨草减小了0.024,白茅减小了0.021,互花米草与碱蓬均减小了0.016(图5)。这表明了,进行Landsat 7 ETM+和Landsat 8 OLI 定标较为必要,能够保证Landsat 系列数据构建的时间序列在数值上接近、可比。
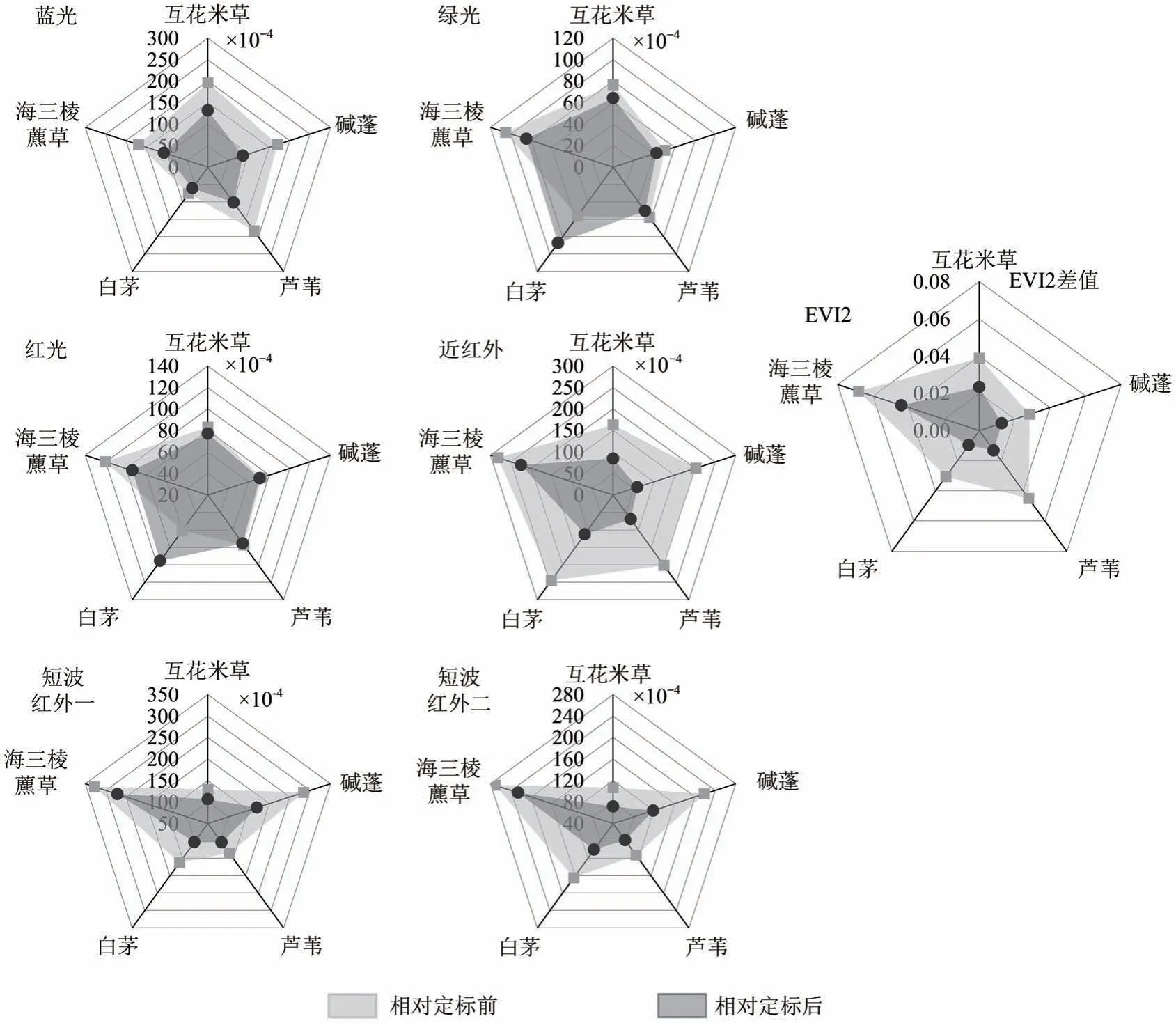
图5 相对定标前后各个波段和EVI2指数在盐沼植被上差异比较Fig.5 Comparison of the differences on each spectral band and EVI2 for salt marsh vegetation before and after inter-calibration
4.2 分类结果与精度评价
2018 年基于像元级时间序列盐沼植被分类结果如图6所示。目视观察发现,分类结果与样本数据较为一致,并且分类结果展现的盐沼植被分布的与其生态位理论高度吻合,表现出由陆向海的芦苇(茅草)—碱蓬—互花米草—海三棱藨草地带分布特征(图6(a)Ⅰ、6(b)Ⅰ、6(c)Ⅰ)。定量来看,研究区总体精度平均为81.50%,Kappa 系数平均为0.758(表1)。丹顶鹤自然保护区分类精度最高(总体精度为83.22%,Kappa系数为0.782,表1);九段沙湿地其次(总体精度为81.53%,Kappa 系数为0.754,表2);杭州湾南岸湿地最低(总体精度为79.74%,Kappa系数为0.738,表3)。

表1 丹顶鹤自然保护区混淆矩阵及精度Table 1 Confusion matrix and accuracy analysis of Red-crowned Crane Nature Reserve
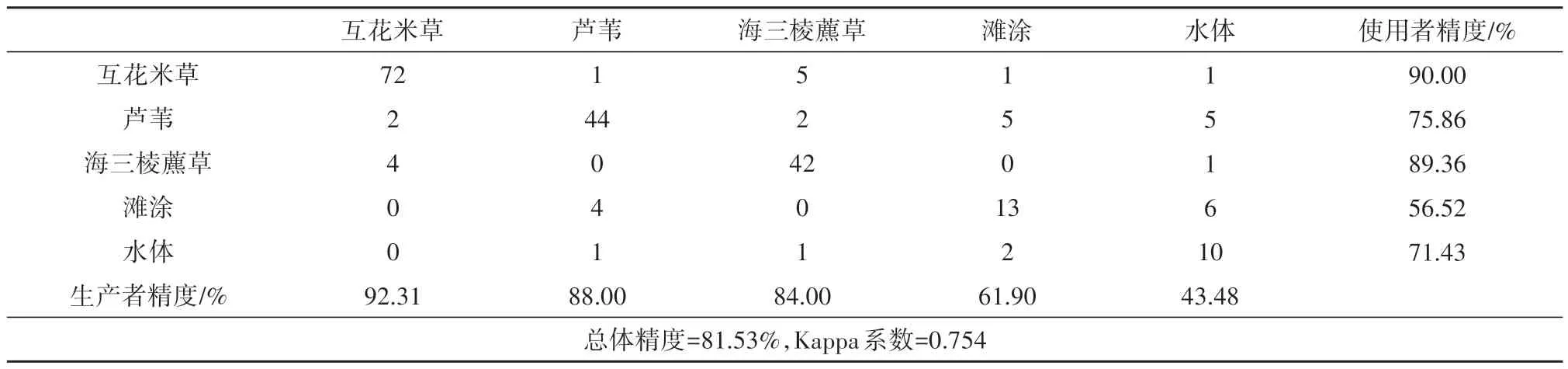
表2 九段沙湿地混淆矩阵及精度Table 2 Confusion matrix and accuracy analysis of Jiuduansha Wetland
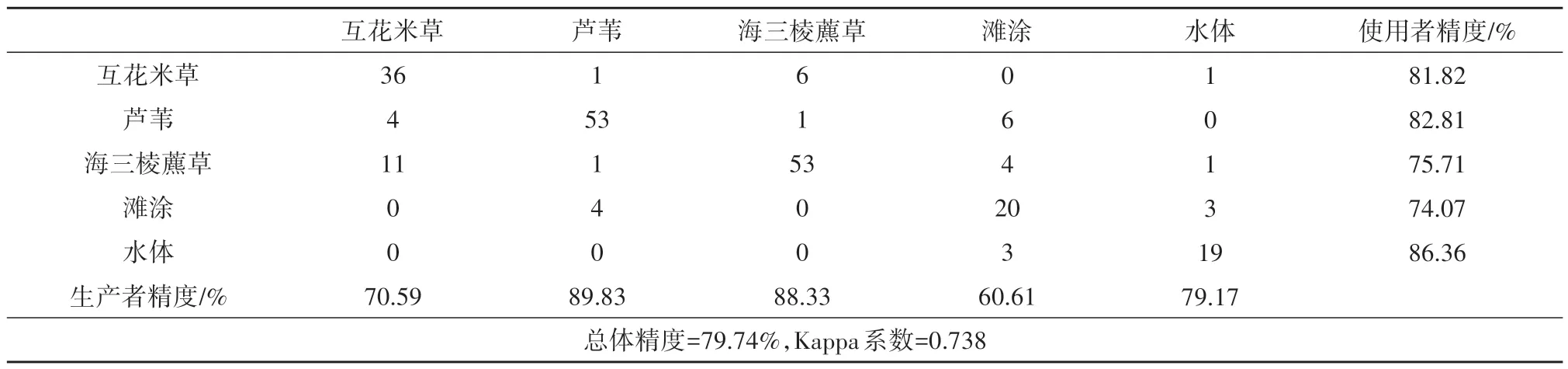
表3 杭州湾南岸湿地混淆矩阵及精度Table 3 Confusion matrix and accuracy analysis of Southern Coastal Wetland Hangzhou Bay

图6 基于像元级时间序列2018年盐沼植被分类结果Fig.6 Classification mapping of salt marsh vegetation in 2018 using pixel-level based time-series method
具体到各类盐沼植被,互花米草分类效果较好(图6(a)Ⅱ、(a)Ⅲ、(b)Ⅱ、(b)Ⅲ、(c)Ⅱ、(c)Ⅲ),除杭州湾南岸湿地外,在各个研究区的生产者精度和使用者精度均接近90%以上,平均精度(生产者和使用者精度均值)可达86.75%。其次是海三棱藨草(图6(b)Ⅱ、(b)Ⅲ、(c)Ⅱ、(c)Ⅲ),除在杭州湾南岸湿地的使用者精度较低(表3)以外,生产者精度和使用者精度也维持在80%以上,平均精度可达84.35%。尽管芦苇的平均精度也较高(84.03%),但生产者与使用者精度波动较大,出现高值低值交替情况(表1)。这是由于芦苇在各个研究区与不同地物存在混淆——在丹顶鹤自然保护区,与碱蓬和水体混淆(图6(a)Ⅳ)导致了较低使用者精度(79.57%);在九段沙湿地,与滩涂和水体混淆(图6(b)Ⅳ、(b)Ⅴ)导致了较低生产者精度(75.86%)。类似情况也出现在茅草和碱蓬上(图6(a)Ⅴ)导致两者精度低、波动大(表1)。总体上,对于各类盐沼植被,平均精度均在83.58%,说明基于像元级时间序列分类效果较好。需要注意地是,分类中的生产者精度和使用者精度的低值往往来源于滩涂和水体,例如,九段沙湿地水体的生产者精度仅为43.48%,滩涂的使用者精度仅为56.52%(表2)。若将滩涂和水体因素排除,盐沼植被分类的总体平均精度有望进一步提高88.70%。
4.3 分类稳定性分析
研究将像元级时间序列分类方法用于2019 年的Landsat 影像,对比总体精度差异以检验方法的稳定性。我们采用的分类算法、样本点位置与2018 年保持一致,但在2019 年样本点的盐沼植被类型通过结合Google Earth 高清历史快视图校验,重新标注类型发生变化的样本点。在100次随机重复实验中,每次将相同训练和验证样本选择方案用于2018 年和2019 年盐沼植被分类和总体精度计算,统计两年分类精度差异的分布。同时,研究利用相同样本选择方案分类两年同一月份的无云Landsat 影像,比较单一时相分类方法与像元级时间序列分类方法的精度与稳定性(图7)。

图7 基于像元级时间序列与基于单景影像的分类精度与稳定性对比Fig.7 Comparison on accuracy and stability between pixel-level time-series based classifications and single-phase based classifications
在丹顶鹤自然保护区,5 组单一时相分类方法的绝对差异均值介于2.50%—9.83%,均高于像元级时间序列分类方法的绝对差异均值2.43%(图7)。同时,像元级时间序列分类(2018 年、2019 年)平均总体精度达到82.36%,相比单一时相分类平均精度(介于66.54%—72.12%)提升明显。在九段沙湿地,像元级时间序列分类方法的绝对差异均值为3.88%,除了略高于1 月份的单一时相分类方法的绝对差异均值(2.51%)外,均低于其他月份的绝对差异均值(图7)。1月份的单一时相分类方法的绝对差异均值较小主要由于成像时间位于冬季且较为接近(仅为3 d)。然而,由于盐沼植被多已衰老枯萎,这一时期并不适合盐沼植被分类,平均总体精度仅为59.20%。类似情况也发生在杭州湾南岸湿地,像元级时间序列分类方法的绝对差异均值为3.58%,除略高于1 月份外,均低于其他月份单一时相分类方法的绝对差异均值(图7)。总体上,像元级时间序列方法在2018 年和2019 年的分类绝对差异均值在3.88%以下,且波动变化较小,有望扩展应用于其他年份Landsat影像上,实现盐沼植被长时期动态监测。
5 讨论
5.1 分类结果误差来源
不同于单一时相分类方法,采用像元级时间序列方法的分类结果优劣往往受控于研究时期内分类对象的稳定性——若在研究时期内物种组成与分布较为稳定,则分类精度较高,反之精度较低。盐沼植被演替现象为像元级时间序列分类带来了困难。(1)不同盐沼植被交界处是分类错误的高发区。野外调查发现,由于芦苇与碱蓬的生态位接近,秋末部分芦苇种子落入碱蓬群落中并在次年春季陆续发芽生长。新生芦苇植被高度和植株覆盖度较低,导致像元级时间序列数值偏低,分类中易与碱蓬混淆(图6(a)Ⅳ)。(2)新增垦区内也是盐沼植被更替变化的多发区。新建海堤阻断了潮汐作用,致使堤内滩涂干涸,通过自然降雨和人工引渠等作用下底质脱盐,促使垦区盐沼植快速向潮上带甚至淡水植被转变(Portnoy 和Valiela,1997;Rozema 等,1985)。这也是杭州湾南岸湿地垦区内盐沼植被混分严重的主要原因(图6(c)Ⅳ、(b)Ⅴ)。(3)形态多变的潮沟系统亦为盐沼植被分类增加了难度。潮沟系统的频繁摆动、旁向侵蚀等活动导致了潮沟及附近滩面极不稳定。由于潮沟频繁摆动,在前一次观测中盐沼植被可能在下一次观测中变为滩涂或海水。另外,潮沟周围多出现盐沼植被与滩涂、海水组成的混合像元,使得潮沟周边区域成为像元级时间序列分类的困难区域。研究中的滩涂和海水样本多选取潮沟周边区域,因而导致了滩涂和水体分类精度较低(表1)。
5.2 有效观测对分类结果的影响
纬度差异往往伴随着气候差异,进而影响有遥感观测的数量和分布。相较于中国北方沿海区域,中国南方海岸夏秋两季云雨天气更为频繁,而夏秋两季又被认为是能够体现盐沼植被生长状态差异的重要季节(Li 等,2010;Liu 等,2013;Xiao 等,2018)。若仅采用无云影像进行时间序列构建,在3块研究区都将会缺失重要季节(丹顶鹤自然保护区:夏季;九段沙和杭州湾南岸湿地:秋季;图3),从而使得分类精度难以保证。利用像元级时间序列方法在很大程度上弥补了这一问题,使得夏秋两季的有效观测数量得以保证。但从全年来看,像元级时间序列在2018 年的有效观测数量仍表现出由北至南逐渐减小的趋势,由18.7 次下降到15.0 次,再降至11.4 次。与之对应地,基于像元级时间序列方法的盐沼植被分类精度和稳定性由北至南也在不断减小——总体精度由83.22%下降至79.74%(表1),精度差异也存在1%左右的差距(图7)。可见,对于像元级时间序列而言,保证一定数量的有效观测仍然具有意义,这也说明了研究通过多源Landsat 影像定标协同提升有效观测数量的必要性。对比丹顶鹤自然保护区和杭州湾南岸湿地,尽管有效观测数量下降明显(7.3 次),但分类总体精度却降幅不大(3.48%),说明杭州湾南岸湿地的有效观测数量能够满足像元级时间序列方法。随着有效观测数量继续降低,研究认为可能存在使得分类总体精度陡然下降的临界点。发现有效观测数量的临界点,以此判断某一区域或时期是否具备利用像元级时间序列进行盐沼植被分类的条件,可以作为后续研究的方向。
6 结论
本研究以长三角典型湿地区域为例,通过对多源Landsat 影像进行反射率定标配准,构建了Landsat 影像的像元级时间序列,并精细分类研究区的5种盐沼植被,所得结论如下:(1)通过相对定标耦合多源遥感影像有效减小了不同传感器间的差异,对于用于构建时间序列的植被指数EVI2尤为明显。(2)XGBoost 决策树分类算法,可有效应对由于云雨与条带影响形成的稀疏、不对称时间序列数据,能够保证像元级时间序列在盐沼植被分类精度。(3)像元级时间序列方法年际分类精度波动较小、稳定性较高,有望应用于海岸带植被动态变化监测中。在后续研究中,我们将验证像元级时间序列盐沼植被分类方法移植到其他数据(Sentienl-2、HJ 等)和应用于长时期动态监测的可行性,以期更好服务于多源遥感数据的滨海湿地变化监测中。
猜你喜欢
河北地质(2022年2期)2022-08-22
今日农业(2021年19期)2022-01-12
空间科学学报(2020年1期)2021-01-14
——乌尤尼盐沼
家教世界(2020年17期)2020-07-06
环球时报(2019-11-14)2019-11-14
现代园艺(2017年23期)2018-01-18
百科探秘·航空航天(2017年10期)2017-11-08
生态与农村环境学报(2017年8期)2017-08-22
成都信息工程大学学报(2017年6期)2017-03-16
中国光学(2015年5期)2015-12-09