
智能化药物运输机器设计
2023-07-10 05:47:35徐威余胤翔孙福源
电子产品世界 2023年6期
徐威 余胤翔 孙福源
关键词:无线充电;路径规划;人机交互;tc264
随着我国自动化技术和医疗技术的不断进步,近年来国内自动化药房技术进一步成熟,在国内多家知名大型医院成功应用[1]。自动化药房不仅能提高医院药房服务效率,而且能满足医院数字化的要求,弥补了传统药房的很多不足之处[2]。针对实现药房自动化问题,设计了智能化药物运输机器。提高了工作效率,减轻了护士的劳动强度[3]。
1结构设计
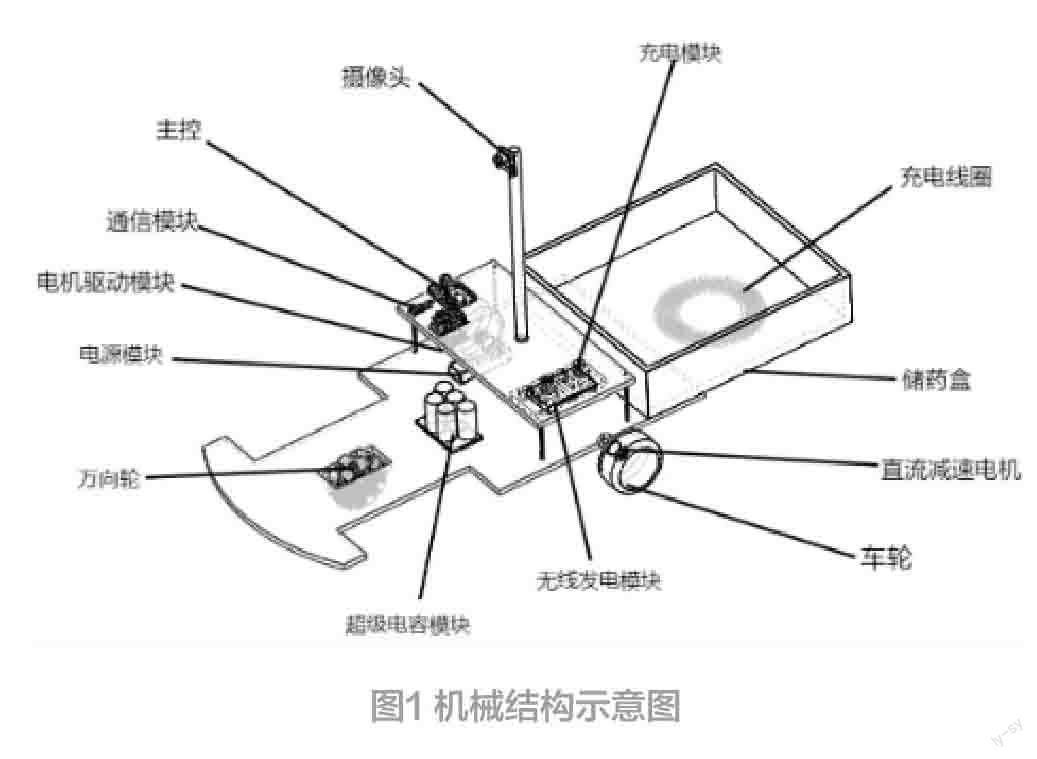
该机器主要由主控装置,驱动装置,接收装置,无线充电装置来组成。
1.1主控装置
主控是由TC264来完成。
1.2驱动装置
驱动是由DRV8701驱动模块、有刷电机、编码器组成,DRV8701驱动模块控制有刷电机运行,编码器做到闭环pid控制有刷电机转速。
1.3接收装置
接收装置有HC05蓝牙模块、1d3320语音模块、MT9V034摄像头、usart hmi串口屏。HC05蓝牙模块用来和电脑上插入的HC05藍牙模块进行蓝牙通信,以获取电脑上传来的信息。ld3320语音模块用来与病人及其家属交流的,以获取病人及其家属传来的信息。MT9V034摄像头用来检测道路的,让机器不会偏离航线,获取道路信息,避让行人。usart hmi串口屏用来接收医生和护士所需要传递药品的信息。
1.4无线充电装置
无线充电装置是由无线充电接收装置、超级电容来组成。接通了直流电源的无线充电发射装置通过功率半桥生成方波信号源给初级线圈,初级线圈耦合初级线圈能量,通过LCC补偿电路后整流滤波,再通过稳压器生成各路稳定电压储存在超级电容中,给机器供电。
2系统设计
2.1控制流程
该机器用usart hmi串口屏用串口通信或是HC05蓝牙模块用无线通信的方式获取订单信息,传输给TC264单片机,通过基于蚁群算法栅栏地图的路径规划进行规划最优路径,使用基于LCC补偿电路的无线充电收发装置进行充电,储存在超级电容中。充足电后,MT9V034摄像头通过大津法和细化算法进行循迹及避障,DRV8701驱动模块驱动有刷电机道路行驶,到底送药终点处后,LD3320语音模块将事先通过电脑蓝牙无线通信传输的病人状况告知病人及病人家属。完成任务后回到起点,等待下次命令。
2.2工作流程
机器正常运行之前,需导入地图信息(机器人运行时所在的楼层地图),导入病人的个人信息及病情状况。已将运送的药品放入药品框内。
机器正常运行时,从车库出发,需打开机器人开关,给单片机供电。待接收到蓝牙无线通信来得知的运行信息或是从串口屏上串口通信得知的运行信息,自动给无线充电发射装置供电,机器开始无线充电。超级电容电满后,自动关闭无线充电发射装置,并计算最优路径,机器人开始行驶,摄像头查询路况,实时控制机器动向。待到底终点后,机器会等待。病人或病人家属取走药品,并向机器询问完病人的状况后,按下回去按键,机器就会自动回到药房,将车子停入指定的车库(车子尾部的无线充电接收装置对准无线充电发射装置),并等待下一次命令。
3方案与核心算法
3.1无线充电
机器上的部件由超级电容供电。相较于传统电池供电,超级电容的优势在于启动快、效率高、免维护等优点。且超级电容能更适应复杂环境。优化了传统电池因低温等外界条件失效而带来的风险。
以传统线圈直接耦合的方式进行充电时,充电的效率近50%~60%,为了节能起见,在无线充电的两个线圈两侧各加上LCC谐振电路(图5)。在加装上谐振电路后,效率接近80%,可见效率得到了明显的改善。并且不会增加过多的成本。
3.1.1无线充电方案规划 当药房传来信号时,开关控制无线充电发射电路进入工作模式,Ql和Q2在驱动器的驱动下交替导通,在桥臂处形成150 kHz方波功率源。再通过后边的不对称LCC谐振网络把150 kHz的方波信号源转换成正弦信号后通过线圈发射出去。
当机器在车库内处于待命状态并且接收到电能时,整机的电源电路开始运转。首先,线圈接收到的电能经接收部分的LC接收网络后,先经过整流器整流为直流电,再使用多路稳压电源为3.3 V、SV等电压,从而满足整机的供电需求。电容1次充电应略大于跑1次全程的电能,故需要选用较大的超级电容器。
3.1.2方案图
计算出的T型LCC网络有关数据如下表所示:
通过程序计算出的数据如图7。
3.2识别路况
机器识别路况的问题主要为循迹和避障,为解决这个问题,使用大津法进行二值化处理去除灯光的影响,再进行在选定的范围内对其用细化算法,得出中线,让机器按照中线的坐标去行驶,途中若在另个范围内识别到体积大于设定值,机器就会停下等待。
3.2.1大津法
假设图像阈值为T,小于T的像素为目标,且目标部分像素点占图像比例为w0,平均灰度值为u0,而背景部分的像素点占图像比例为w1,平均灰度值为u1。则图像总的平均灰度值为u。简化一下,可以得到类间方差g。
大津法灰度后,图像展示如图8。
3.2.2细化算法及避障
为了选取图像中线坐标组来作为循迹的线,采用细化算法对图像处理。
红框是循迹用的视图范围,蓝框是避障的试图范围。细红线是细化算法后的中线。
避障是利用该蓝框内面积大于预定值,就停止来进行避障。
3.3人机交互
3.3.1串口屏
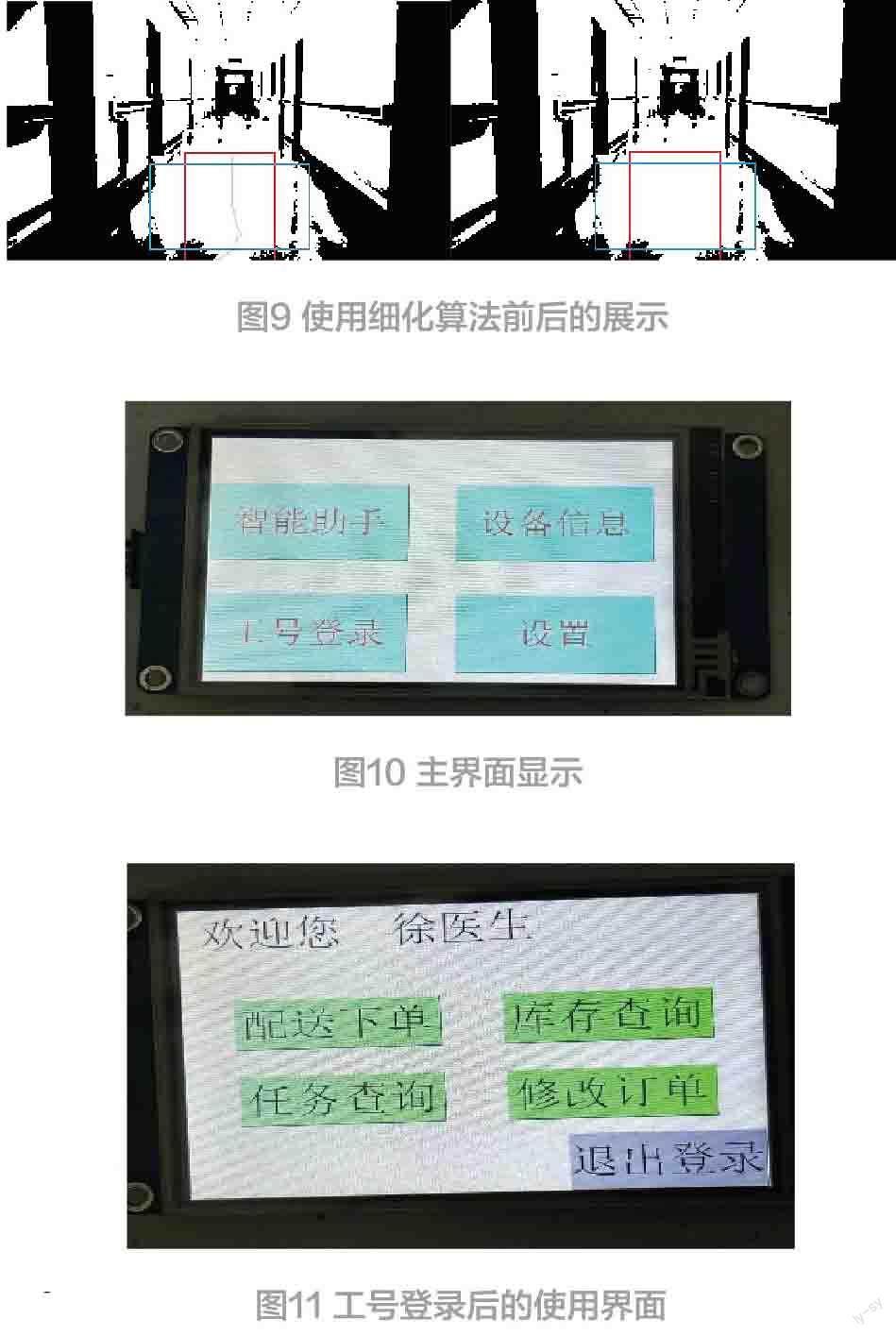
为了方便机器与医生之间的任务传达,设计了串口屏。
使用usart hmi智能串口屏,主显示页面如图10。
触屏点击工号登录,可以进入账号密码的界面,输入完正确的账号密码后会进入使用界面,使用界面如图11。
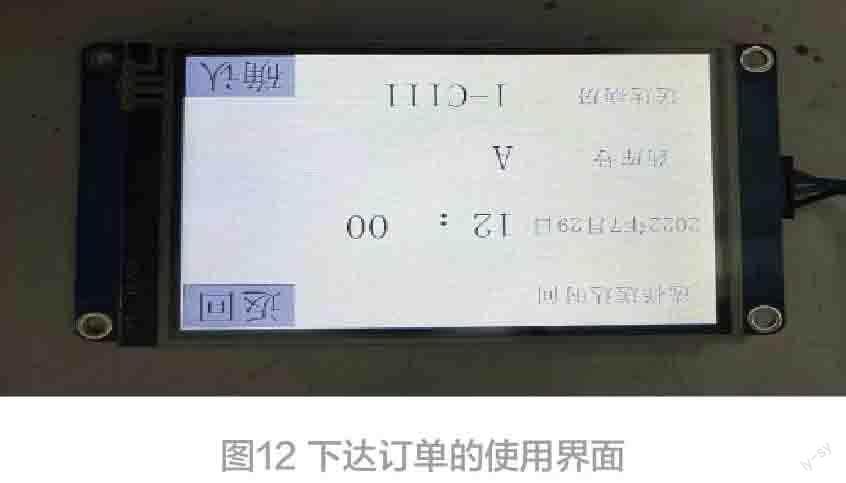
其中触屏点击库存查询,就可以查看库存;触屏点击任务查询,就可以查看订单情况;触屏点击修改订单,就可以删除已经下达的未执行的订单;触屏点击配送下单,就可以下达订单,它的效果如图12。
3.3.2 语音对话
考虑到与病人、病人家属的交流时,病人往往并不能很便利使用串口屏与机器交流,为此添加了语音对话功能,使用的是ld3320 语音模块。
病人和病人家属可以需先通过说出设定后的固定词语唤醒机器人,例如“你好,悠悠”之类的唤醒词,机器就会被唤醒,再说出“查询病人信息,姓名小红”,机器就会说出最新录入数据库中的病人小红信息。
在机器被唤醒后,30 s 内若无再接收到信息也会自动关机。
3.4 基于蚁群算法栅栏地图的路径规划
路径规划是移动机器人的“大脑”[4]。在医院这种复杂的场景下,往往会存在许多的障碍物,如墙壁,座椅等,如果不采用规划路径,可能会出现绕着障碍物行走的情况出现,同时也为了能更快速地将药物送到主治医生或病人的手上,采用路径规划是很有必要的。
3.4.1 导入地图
地图构建路径规划技术,是按照机器人自身传感器搜索的障碍物信息,将机器人周围区域划分为不同的网格空间( 如自由空间和限制空间等),计算网格空间的障碍物占有情况,再依据一定规则确定最优路径[5]。该机器采用了基于蚁群算法栅栏地图的路径规划。栅格法是将机器人周围空间分解为相互连接且不重叠的空间单元[7]。在机器上添加n*m 的矩阵地图,数值上用-1 表示障碍物,0 表示空地,然后选择起点i 与终点j 的各自坐标。
3.4.2 路径选择
每个蚂蚁都会随机选择1 个城市作为其出发城市,并会储存这个路径记忆向量,用来存放该蚂蚁依次经过的城市。蚂蚁在路径的每一步选择中,都是按照1 个随机比例规则去选择下一个要到达的城市。随机概率按照式(11)来计算的:
3.4.3 计算最短距离
将前面所储存的每个路径向量进行计算,算出距离,并在循环下一一对比,得出该迭代次数下的最短路径,并保存在min 中。
3.4.4 更新信息素
蚁群在每次经过的时候都会留下信息素,1 个蚂蚁所携带的信息素为1,它所经过的每一个长度单位下都会平均地留下信息素,但同时信息素会随着时间的变化按所设定的ρ 蒸发。而蚂蚁的选择路径的概率也会被信息素所影响,所以随着迭代次数D 的不停增加,最終所有的蚂蚁都只会走那条最短路径。M 为蚂蚁个数,可以得出,在此次迭代中,实际上挥发后的信息素量加每只蚂蚁留下的信息素量是蚂蚁行走距离的倒数,如式(12)
3.4.5 得出结果
采用以上公式在matlab 中进行了仿真绘图,得到图13 模拟最短路径线路图和图14 代最短路径对比图。
得出结果后,会通过该最短数组集判断得出每一个岔路口怎么转为才为最短路径。并已数组的形式记录。
4测试结果
4.1实物图
4.2无线充电性能测试
充电完成测试:检测充电是否结束,接通电源开始充电后检测红灯和蓝灯是否同时亮,若同时亮,表示正处于充电状态;充电完成后,蓝灯灭,仅红灯亮,表示充电完成。
将小车放置在起点,接通电源充电,60 s时断开电源,小车自行启动,沿引赛道行驶。小车轨道内置刻度线,可测量小车行驶距离。
4.3路径规划性能测试
变换起始点和终点位置,记录计算出最多路径的迭代次数。
5结束语
基于TC264核心板,使用无线充电装置完成供电,再配合HC05 蓝牙模块、ld3320 语音模块、MT9V034摄像头、usart hmi 串口屏DRV8701 驱动模块等设计了智能化运送药物机器,能自主完成无线充电,并规划路径,完成从病房运送药物到病人处,能够通过蓝牙从计算机处获得运送任务,并且具有避障,对话等辅助功能。基本上可以做到正确运送,且效果稳定。
猜你喜欢
电子技术与软件工程(2017年3期)2017-03-22 23:46:38
中国新通信(2017年3期)2017-03-11 09:42:17
科技创新导报(2016年23期)2016-12-23 15:56:20
电子技术与软件工程(2016年20期)2016-12-21 10:52:33
科技视界(2016年26期)2016-12-17 15:53:57
电脑知识与技术(2016年26期)2016-11-25 00:00:00
计算机教育(2016年7期)2016-11-10 09:01:27
中国科技博览(2016年19期)2016-10-19 14:44:47
科技视界(2016年20期)2016-09-29 12:00:43
科技资讯(2015年33期)2016-05-12 21:45:31
