
空间展开臂关节真空-热-力耦合试验方法研究
2023-07-06 09:50:54白宇君许怡贤王浩威刘丽霞回天力孙子杰严振刚唐小军
航天器环境工程 2023年3期
白宇君,田 欣,许怡贤,王浩威,刘丽霞,回天力,孙子杰,辛 亮,严振刚,李 强,唐小军*
(1.北京卫星制造厂有限公司;2.北京空间飞行器总体设计部:北京 100094)
0 引言
展开臂作为执行卫星功能的新型多关节空间机构[1],是驱动卫星天线保证其姿态稳定或对目标进行跟踪的关键部件,也是卫星天线反射器与卫星星体的连接件、固定件和支撑件。展开臂关节在轨工作过程中不但要承受空间环境中的真空、冷黑及太阳辐射等极端环境因素[2-3]的耐久冲击,还要承受展开臂重量、各关节臂紧固连接引入的重量和附加弯矩等载荷,因此展开臂关节在轨工作处于真空、热和力的多场耦合之中[4-6]。
当前,对于新研宇航产品,考核其在轨工作性能的最好方式是地面考核验证试验,一般分为验收级考核与鉴定级考核。对于新型展开臂关节机构,为考核其在多场耦合环境下能否正常、精准、有效地确保展开天线的指向精度,并将天线运送至指定位置,必须在地面研制阶段进行真空-热-力耦合考核试验,验证展开臂关节在极端环境下的各项性能。展开臂真空-热-力耦合试验是通过地面等效环境模拟展开臂关节在轨工作经受的真空、冷黑、太阳辐射环境以及承受的负载力矩、惯量等,测量展开臂关节表面温度分布状态及应力形变特征,进而考核展开臂关节结构机构的在轨工作性能、热变形及可靠性。
目前,真空环境与热循环耦合试验系统多采用热真空环境模拟系统来实现,而力矩加载系统与热真空系统是相互分离割裂的两个系统。如何在复杂的热真空试验系统中引入力矩加载系统,精准、有效地实现真空-热-力的联合加载,而又不干扰原有系统的试验精度,是真空-热-力耦合试验的难点与关键点。国内现有的热-力耦合试验[7-9]多为理论研究,且大多面向航空发动机、超声速飞机等,没有引入真空环境因素;若要引入真空环境,必须采用特定的设备和材料[10-11]。
为研究适用于空间展开臂关节的真空-热-力耦合试验方法,营造切合在轨工作实际状态的试验环境,考核展开臂关节的在轨工作性能,本文考虑通过热真空试验系统完成对展开臂关节真空、冷黑和太阳辐射环境的模拟,同时通过外部定量惯量盘模拟施加展开臂负载,再通过试验验证该试验方法的可行性。
1 真空-热-力耦合试验技术原理
真空-热-力耦合试验在现有热真空试验系统[12]基础上引入力矩加载系统,力矩加载轴与热真空罐体穿舱连接,其中惯量盘惯量经减速器传至扭矩传感器对产生的扭转力矩进行感知检测,将外部力矩施加至热真空罐体内的产品端,以实现真空-热-力耦合试验中的力负载施加,如图1 所示。
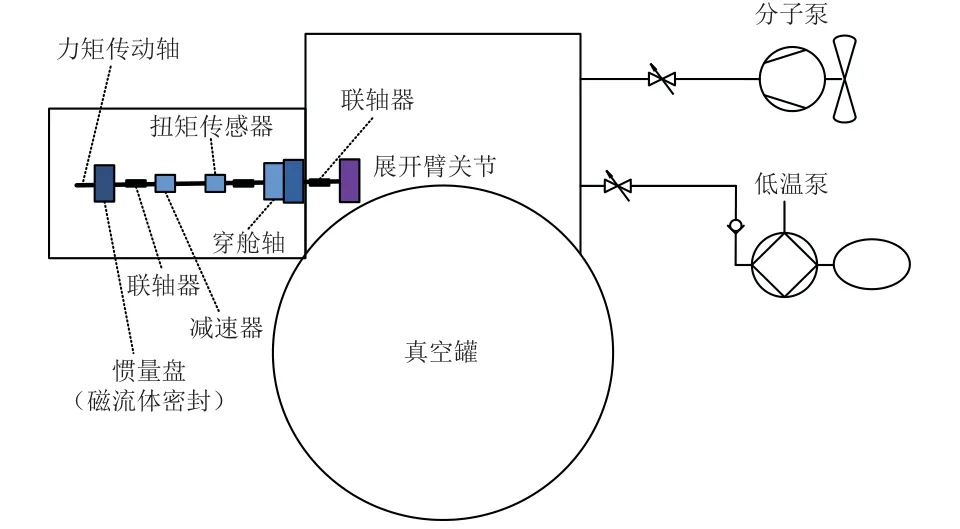
图1 真空-热-力耦合试验系统的力矩加载系统示意Fig.1 Schematic diagram of vacuum-thermal-mechanical coupling test system and torque loading system
真空-热-力耦合试验系统中的力矩加载系统包括罐外扭矩传感器、减速器、联轴器、惯量盘及力矩传动轴等,它们的转动惯量与电机转动惯量相比很小,可以忽略不计。另外,扭矩传感器、联轴器为非刚体结构,在传递扭矩的过程中会发生形变,导致传动环节两端的角位移是不同的,因此可以把力矩加载系统的中间传动部分简化为一个无惯量扭簧,其扭转刚度为KL。由此可以认为电机的负载转矩和传动环节两端的角度差之间存在线性比例关系[13],其数学模型表示为
式中:TL为电机负载扭矩,N·m;KL为传动环节的扭转刚度,N/m;θm为电机输出角度,°;θr为被测对象的转动角度,°;Km为减速器减速比;G为外部惯量,kg·m2。
根据力矩加载系统的工作原理得出加载电机、中间传动环节和驱动器的数学模型,并进行Laplace变换,得到整个力矩加载系统的开环结构,如图2[13]所示。可以看出,系统以驱动指令电压Ud(s)和关节转动角度θr(s)为输入,以实际加载的力矩TL(s)为输出。对于线性系统的多输入单输出问题,可以采用线性叠加的方法得出输入与输出之间的关系。因此,在Ud(s)和θr(s)同时作用于系统时,总输出是两输出的线性叠加,故得力矩加载系统整体的数学模型表达式[13]为
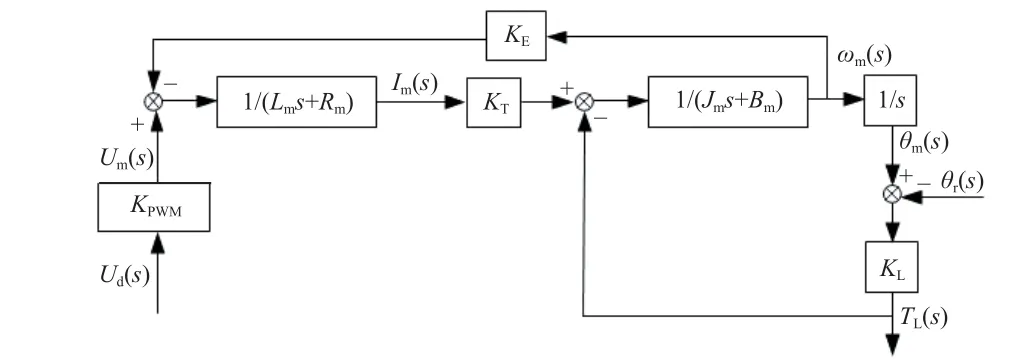
图2 力矩加载系统工作原理[13]Fig.2 Working principle of torque loading system[13]
式中:G1(s)为驱动指令电压与实际输出力矩之间的传递函数;G2(s)为关节转动角度与实际输出力矩之间的传递函数。它们的表达式[13]分别为:
其中:Rm为电枢回路总电阻,Ω;Lm为电枢回路等效总电感,H;Jm为电机转动惯量,kg·m2;Bm为电机阻尼系数;ωm为电机转速,r/min;KPWM为驱动器功率放大系数;KT为电机转矩系数;KE为反电动势系数。
2 展开臂关节真空-热-力耦合试验设计
依托真空-热-力耦合试验技术,通过热真空试验系统完成展开臂关节真空、冷黑和太阳辐射环境的模拟,通过展开臂关节试验平台完成试验载荷的模拟施加。
热真空试验系统由真空容器、热沉、真空抽气系统、液氮制冷、氮气回温系统、红外加热装置和测控系统等组成。根据展开臂关节运动的最大包络,选择KM1 热真空罐,其环境压力可靠范围≤1.3×10-3Pa,试验温度范围-80~120 ℃。
展开臂关节热-力耦合试验平台分为罐内和罐外两部分,如图3 所示。在罐内冷板上安放关节产品,采用柔性双膜片联轴器将罐内产品动力输出轴与罐外穿舱轴连接。罐外试验平台包括磁流体密封装置、穿舱轴、扭矩传感器、减速器及外部惯量加载装置,其中:采用直径350 mm、厚23 mm 的钢材圆盘作为定量惯量盘实现关节外部负载惯量的施加,经减速器对惯量放大(放大系数为1622׃1)后,加载到轴上的惯量为6 059.4 kg·m2,惯量误差为0.04%,满足设计要求;扭矩传感器量程为100 N·m,采集精度优于±1%FS;穿舱轴直径为50 mm,大直径可避免穿舱轴产生挠度影响其水平度;惯量盘加载系统整体同轴度优于0.01 mm;力矩加载穿舱轴与罐体间的密封采用磁流体密封装置,使用冷却水系统调控密封装置内部的阻力矩,以确保系统整体阻力矩小于0.5 N·m。
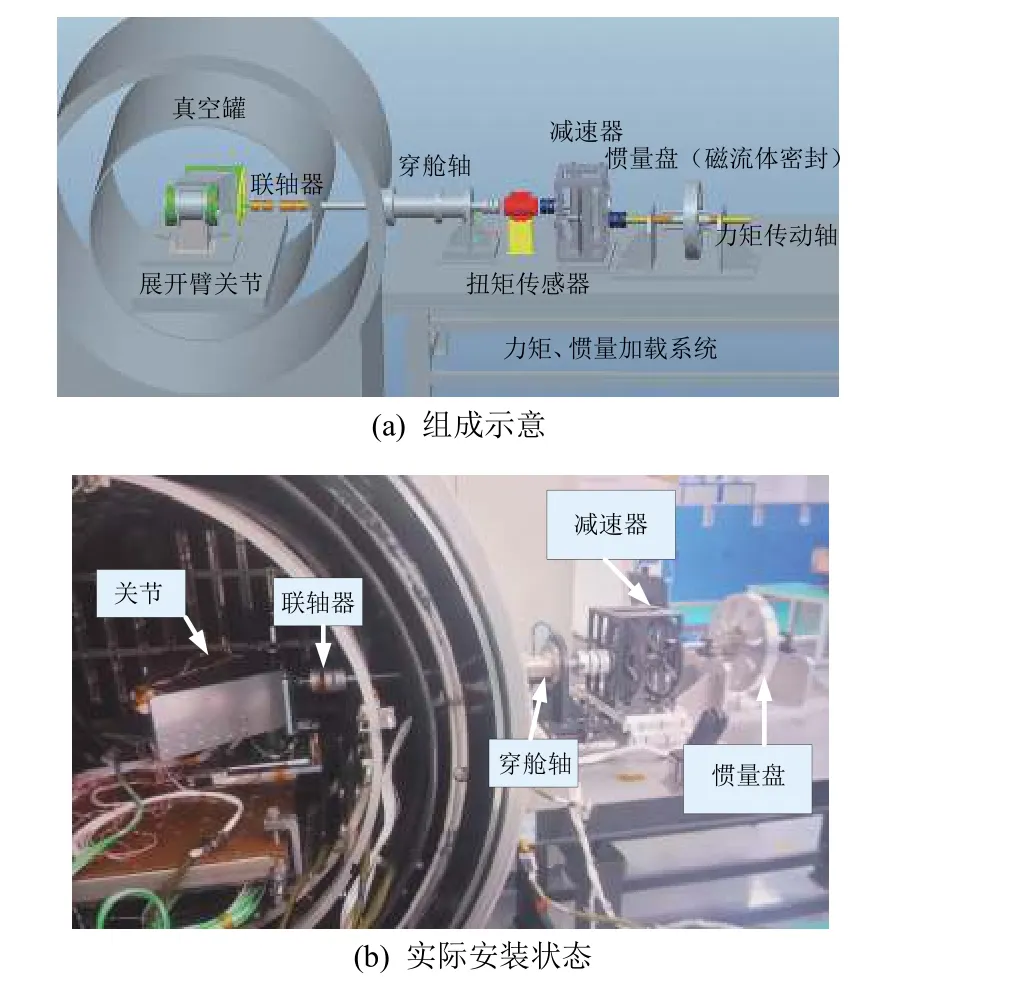
图3 展开臂关节真空-热-力耦合试验平台Fig.3 Vacuum-thermal-mechanical coupling testbed for deployable arm joint
试验时,通过地面控制器控制关节机构中驱动电机的转动;考虑关节在轨工作负载状态,从零位到展开锁定的展开角度行程约为90°。由于力矩加载轴的对中,磁滞流体密封间隙,转接轴、穿舱轴和联轴器安装的偏差等均会引入一定的加载误差,整体设计时须在惯量盘中扣除2.4 kg·m2,以便将偏差控制在允许范围内。
考虑驱动组件低温下启动时间偏长、启动电流偏大,为尽可能减少驱动组件正样产品电机的使用,按照GJB 1027A—2005《运载器上面级航天器试验要求》[14]确定热控系统余量,展开臂关节试验温度控温点选取在展开臂关节表面上,温度范围-35~70 ℃,真空度优于6.65×10-3Pa,循环次数为9.5 次。依据此试验条件开展展开臂关节真空-热-力耦合验证试验的温度循环曲线如图4 所示。

图4 展开臂关节真空-热-力耦合温度循环曲线Fig.4 Vacuum-thermal-mechanical coupling temperature cycling curve of the deployable arm joint
试验过程中展开臂关节底部直接安装在固定工装上,关节底部工装整体放置在热真空罐的冷板上,产品放置于热真空罐体中间,试验时可对加热笼前、后、左、右及上方区域独立开启控温,控温点粘贴在关节旋转轴和关节电机上。试验过程的真空度曲线和产品温度曲线如图5 所示。
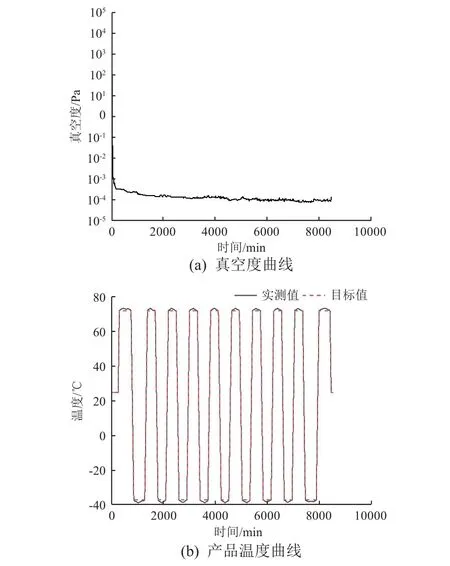
图5 展开臂关节真空-热-力耦合试验曲线Fig.5 Test curve of vacuum-thermal-mechanical coupling of deployable arm joint
从图5 可以看出,整个试验过程中,真空度满足≤6.65×10-3Pa 的要求,高温端测试时,关节控温点温度在70.0~73.5 ℃之间;低温端测试时,关节控温点温度在-35.0~-38.8 ℃之间,均满足控温容差(高温0~4 ℃,低温-4~0 ℃)要求。
3 真空-热-力耦合试验结果分析
为考察惯量盘对力矩的影响,使用不同的惯量盘进行试验扭矩调试测试。力矩随惯量变化如图6所示。可以看出,相同的产品在转动相同角度的情况下,惯量越大,产品承受的扭矩负载越大。

图6 扭矩随惯量变化Fig.6 Torque changes with inertia
为考察真空-热-力耦合试验的惯量加载是否符合试验需求,对试验过程中展开臂关节承受负载力矩情况进行监测,结果如图7 和图8 所示。从图中可以看出,高/低温环境下展开臂关节A 实际负载力矩值基本在目标值附近波动,呈锯齿状,且波动幅度小于5%。表明该力矩加载系统能将外部惯量精准传递至产品上,而且能够与热真空试验系统相互协调耦合,进而证明该加载方法设计符合真空-热-力耦合试验需求,有效、可行。
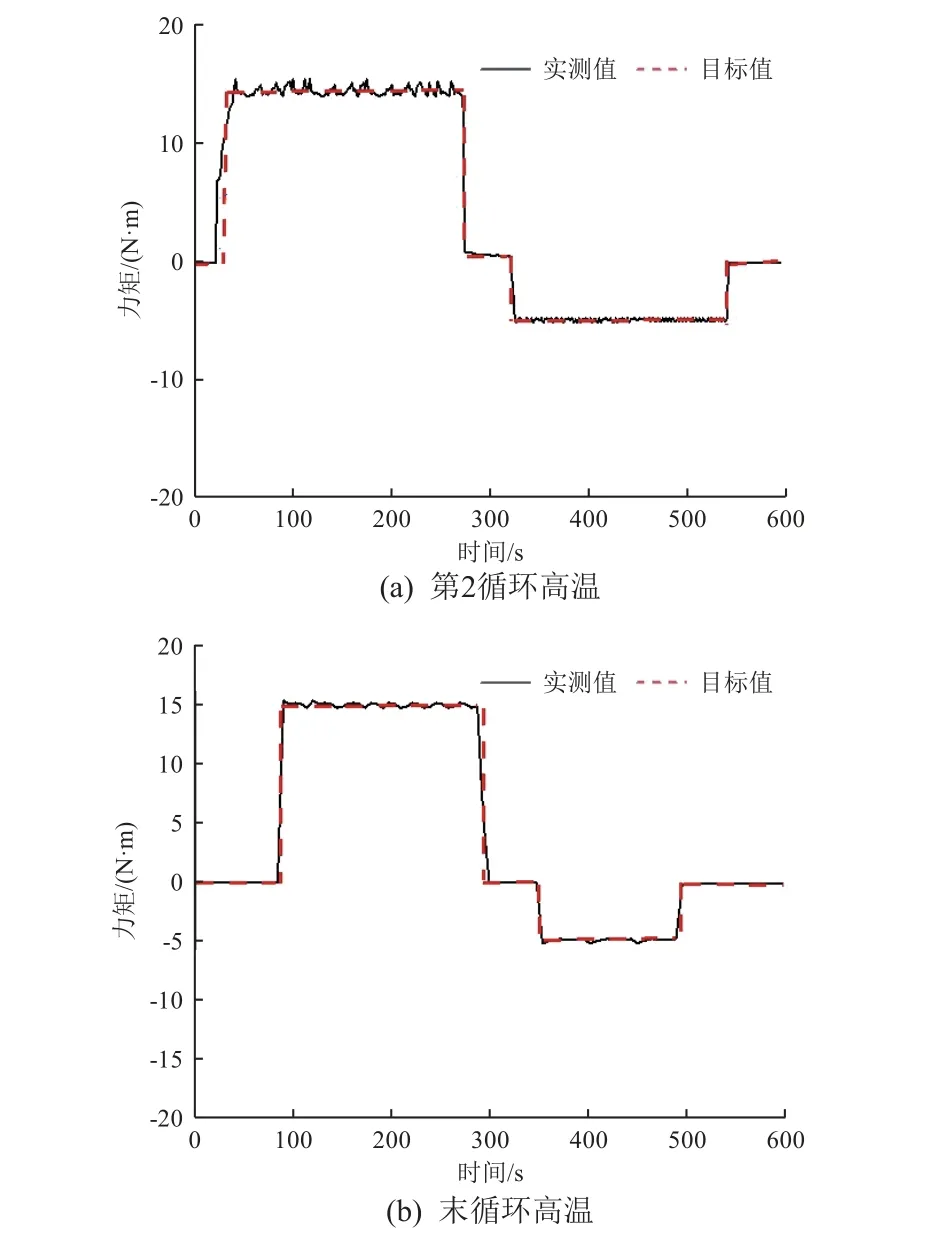
图7 臂间关节A 热真空试验高温力矩Fig.7 High-temperature torque of arm joint A in thermal vacuum test
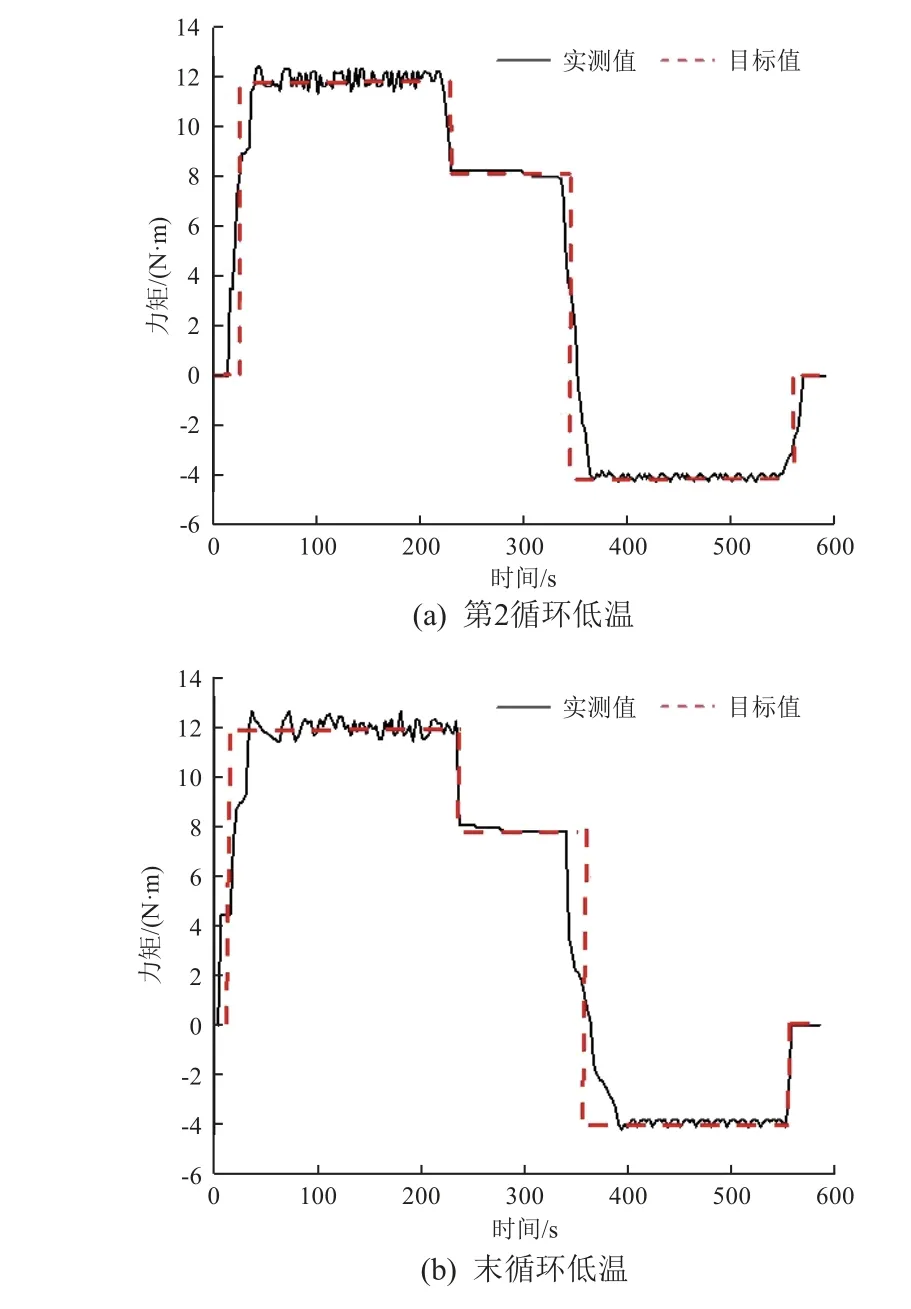
图8 臂间关节A 热真空试验低温力矩Fig.8 Low-temperature torque of arm joint A in thermal vacuum test
为考察外部力矩加载系统穿舱加载对产品性能是否产生影响,对展开臂关节高低温环境下的工作电流进行监控,结果如图9 所示。从图中可以看出,高/低温环境下展开臂关节工作电流均呈随机状波动,高温下波动范围为0.20~0.31 A,低温下波动范围为0.95~1.15 A,均处于设计电流要求的安全范围内。表明第2 章所述真空-热-力耦合试验设计方法满足展开臂关节试验需求,具切实可行性,加载精度高,控温准确且方便,结构形式简单。
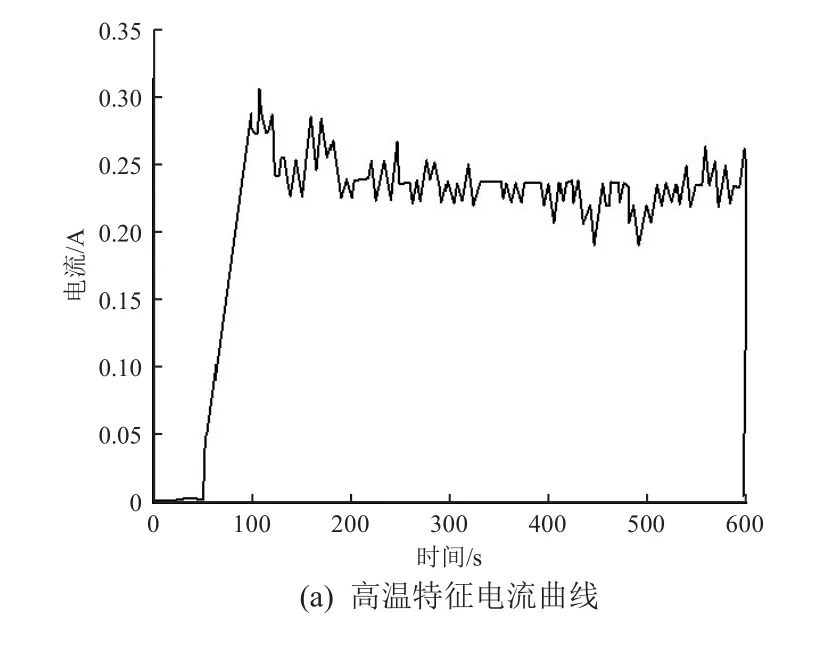
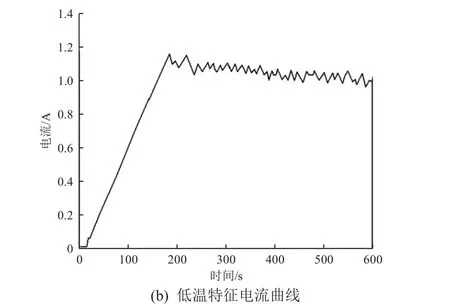
图9 臂间关节A 热真空特征电流曲线Fig.9 Thermal vacuum characteristic current curve of arm joint A
为考察外部力矩加载系统与热真空系统耦合试验方式对展开臂关节性能是否有影响,对展开臂关节试验前/后的启动力矩、启动平稳后最高转速及展开精度进行对比分析,结果如图10 所示。从图中可以看出,采用该真空-热-力耦合试验设计,试验前/后展开臂关节启动力矩、关节最高转速以及展开精度均无明显变化;空间角度在23.714 8°~23.715 2°范围内变化,指向精度优于0.001°。表明该真空-热-力耦合试验方法能够满足展开臂关节真空-热-力耦合考核试验需求,切实可行。
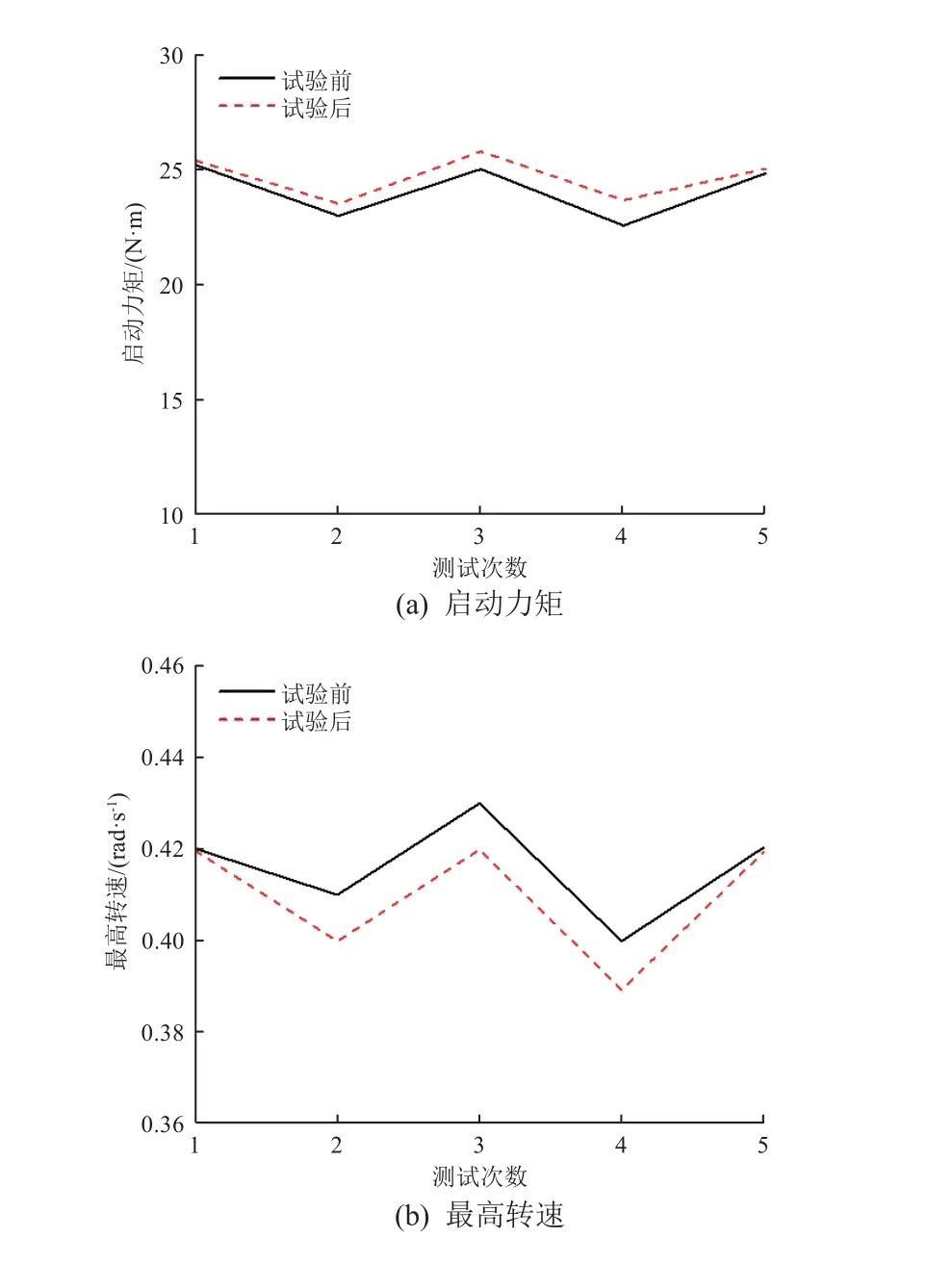
图10 试验前后关节性能参数对比Fig.10 Comparison of joint performance before and after the experiment
4 结束语
本文基于展开臂关节真空-热-力耦合试验技术的需求和要求,提出了一种适用于展开臂关节的真空控温联合力矩耦合加载试验设计方法,并对该方法的加载有效性、加载精准性、控温精准性及加载系统对产品的影响等进行试验验证。验证结果表明:采用新设计的真空-热-力耦合试验方法进行展开臂关节试验时,试验过程中罐体真空度、温度及控温精度均满足试验要求;高/低温环境下展开臂关节工作电流呈随机状波动,波动范围均处于设计电流要求安全范围内;试验前/后展开臂关节启动力矩、最高转速以及展开精度均无明显变化,且指向精度优于0.001°。综上说明,本文设计的真空-热-力耦合试验方法满足展开臂关节试验需求,具切实可行性,且加载精度高,控温准确、方便,结构形式简单。
猜你喜欢
客车技术与研究(2023年6期)2023-12-19 01:21:18
现代电力(2022年2期)2022-05-23 12:46:16
中国煤层气(2021年5期)2021-03-02 05:53:14
中国惯性技术学报(2018年1期)2018-05-10 16:24:00
凿岩机械气动工具(2017年3期)2017-11-22 07:21:50
重庆理工大学学报(自然科学)(2017年5期)2017-06-29 12:01:58
山东青年(2016年12期)2017-03-02 18:22:48
光学精密工程(2016年6期)2016-11-07 09:08:02
航天制造技术(2016年6期)2016-05-09 08:32:51
探测与控制学报(2015年4期)2015-12-15 15:00:56
