基于NLM-CEEMDAN 和样本熵的水电机组振动信号去噪
2023-07-04 00:36章芳情王成城
中国农村水利水电 2023年6期
章芳情,袁 方,贺 玉,王成城,郭 江
(1. 武汉大学动力与机械学院,湖北 武汉 430072; 2. 武汉理工大学自动化学院,湖北 武汉 430070;3. 机械工业仪器仪表综合技术经济研究所,北京 100050)
0 引 言
水电机组是实现能量转换的高安全装备,在国家实现双碳战略中发挥着重要作用。随着经济社会的发展,对水电机组安全性、可靠性和稳定性的要求越来越高,但水电机组运行环境相对比较复杂,这对其安全稳定运行造成了很大威胁,如何对机组运行状态进行有效监测与诊断是目前行业研究热点[1]。据相关研究表明,水电机组近80%的故障均可以从设备的振动中体现出来[2]。因此,通过对水电机组的振动信号进行在线监测诊断,能及时发现装备的异常状况,从而保障水电机组的安全稳定运行[3],为后续故障诊断工作的开展提供可靠依据。
水电机组的振动信号是机组运行状态评价的重要指标之一[4],其本身就是一种非线性、非平稳性的信号,再加上信号采集时一般会受到设备运行所产生的噪声影响,使得采样信号难以直接真实反映设备运行状态。因此,如何将设备振动信号去噪,进而获取真实信息十分必要。传统的傅里叶变换比较适合用于平稳规则的线性信号分析[5],小波分析虽然可以进行相应的非平稳信号分析,但是其参数设置缺乏自适应性[6]。经验模态分解(Empirical Mode Decomposition ,EMD)作为一种较新的时频分析算法,通过将信号分解成若干个固有模态分量(Intrinsic Mode Function ,IMF),可在时频上对信号进行全面分析,但其分解过程中容易产生模态混叠、端点效应等问题[7]。集合经验模态分解(Ensemble Empirical Mode Decomposition,EEMD)是EMD的一种改进方法[8],它虽然可以部分抑制EMD分解所产生的模态混叠和端点效应,但该方法本身也容易带来辅助噪声残留等新问题,影响去噪效果[9,10]。为此,Yeh 和Huang 等[11]提出了互补集合经验模态分解(Complementary Ensemble Empirical Mode Decomposition,CEEMD)方法,有效抑制了残留辅助噪声,但信号分解不完备、计算效率低等问题未能很好解决。可变模态分解(Variational Mode Decomposition,VMD)能很好地避免类EMD 方法中的端点效应问题[12],但需要事先设定分解的K值导致无法自适应分解,难以满足水电机组振动信号在线自动监测分析的需求[13]。近年来,利用自适应噪声完备集合经验模态分解(Complementary Ensemble Empirical Mode Decomposition with Adaptive Noise, CEEMDAN)方法[14]对非平稳振动信号的降噪已经在球磨机筒体振动信号去噪[15]、脑电信号噪声滤除[16]和轴承故障诊断[17]等领域有了初步应用,并取得了较好的进展,但在水电机组振动信号处理方面还有待推广。
为弥补CEEMDAN方法对低信噪比信号去噪效果不理想的缺点以及传统分量检测指标近似熵依赖数据长度和计算效率低的不足,本文在已有的研究基础上,提出了一种基于NLMCEEMDAN 和样本熵的水电机组振动信号去噪新方法。首先对原始信号进行非局部均值(Non-Local Mean,NLM)预处理降噪[18],然后采用CEEMDAN 方法分解预处理信号得到一系列IMF分量,同时计算各个分量的样本熵,并根据样本熵值大小将分量划分为高频含噪分量、信噪混合分量和低频有效分量。最后进一步通过小波阈值去噪方法滤出信噪混合分量中的噪声成分,连同高频含噪分量一起从原始振动信号中滤除,从而完成水电机组振动信号的去噪。以水电机组摆度信号监测分析为例进行应用,通过摆度仿真信号和摆度实测信号进行验证,并与小波阈值去噪、CEEMDAN 滤波去噪作对比试验,结果表明所提出的NLM-CEEMDAN 去噪方法能有效提取水电机组振动信号中的有效信息,是一种优异的信号处理方法。
1 基本原理
1.1 非局部均值滤波
非局部均值滤波算法是利用图像中存在众多相似结构的特性,通过对这些相似结构进行加权平均操作来达到图像去噪的目的,由此NLM算法被显著用于二维图像去噪[19]。然而这些相似特性也存在于一维信号中,并且NLM 算法已被成功应用到一维的滚动轴承振动信号处理中[20],因此NLM算法也能被用于处理水电机组振动信号。
本文利用NLM 算法对水电机组振动信号进行预处理降噪,以方便后续信号特征提取。NLM算法原理如下:
假设实际带噪声的水电机组振动采集信号y(t)为真实振动信号x(t)和外部干扰噪声n(t)的叠加,即:
NLM 算法通过计算y(t)中的全部相似块的加权平均值K(t)来估算真实信号x(t),即:

式中:D(t)表示以t为中心的搜索范围内所有点的集合;Z(t)为归一化因子,表示全部搜索块相似度之和,其计算公式为:

式中:ω(t,s)表示权重,指以t和s为中心的2个搜索块之间的相似度,且须满足0 ≤ω(t,s)/Z(t) ≤1 和∑tω(t,s) = 1 的基本条件,有:
式中:λ为滤波器带宽参数,影响着去噪信号平滑度;Δ 为以t为中心的搜索块,取K为Δ 区域长度的一半,参数K影响着NLM算法的计算量和计算时间;LΔ为以s为中心的邻域块,有LΔ=2P+ 1,参数P影响着算法运行过程中所发现的相似结构块的数量。
参数λ,K,P为NLM算法的决定性参数,很大程度上影响着算法对一维信号的去噪效果,但这些参数的设置仍较多的依赖于人为经验。
1.2 自适应噪声完备集合经验模态分解
EEMD 方法能部分抑制EMD 方法的模态混叠,但由于残存辅助噪音未加隔离,使得噪声会从高频向低频转移,影响后续信号分析处理[21]。针对上述缺陷,CEEMDAN方法解决措施为:①在待分解信号中自适应地加入EMD 分解后含辅助噪音的IMF分量,解决了EEMD 分解过程中存在的完备性缺失和重构误差过大的问题[22];②得到EMD 分解后的第一阶IMF分量后就进行总体平均计算,有效解决了噪声从高频向低频转移的问题;③能减少很多EEMD 分解过程中的对于分析意义不大的幅值很小的低频分量,具有更好的模态分解结果。
CEEMDAN分解算法原理步骤如下:
(1)在原信号X(t)里添加满足N(0,1)的白噪音εωi(t),ε表示噪声标准差,并将得到的信号进行第一阶段的EMD 分解,得到1个第一阶段的IMF分量。通过对X(t)加N种不同的白噪音分别进行第一阶段的EMD 分解,得到N个固有模态分量IMFi1(t),再对这些固有模态分量集合进行总体平均,得到最终的第一阶固有模态分量IMF1(t),即:

(2)计算原信号X(t)减去IMF1(t)的剩余量。

(3)定义Ek表示给定信号经EMD 分解后获得的第k个模态分量。将剩余量X1(t)加入ε1E1(ωi[t])后继续EMD 分解直至得到满足IMF2(t)条件的分量,之后对所得到的N个分量作整体平均,得到原信号的第二阶IMF分量,即:

(4)设最终分解次数为M,k= 2,3,4,…,M时,计算第k个余量:

(5)向Xk(t)中添加辅助噪音εkEk[ωi(t)]后进行第一阶段EMD 分解获取第一阶的固有模态分量集合,计算出原信号的第k+ 1阶固有模态分量:

(6)重复执行步骤(4)、(5),当剩余量的极值点数小于或等于2 时停止上述迭代步骤。最终的剩余量即残差分量,用R(t)来表示。
(7)经CEEMDAN分解后的原信号表示成:

1.3 样本熵原理
样本熵(Sample Entropy, SampEn)是由Richman 等人提出的一种通过度量原始信号中产生新模式的概率大小来衡量时间序列复杂程度的方法[23],当时间序列越复杂,含有噪声分量越多时,样本熵的值就越大[24]。对于具有非线性特征的水电机组振动信号具有较好的特征提取作用。作为近似熵的改进算法,样本熵的计算减少了对数据长度的依赖程度,并且具有更好的一致性,算法更为简单,计算速度更快。
由样本熵计算时间序列的算法步骤如下:
(1)将定长为N的时间序列X(i)按顺序组成m维矢量,即:

式中:i= 1,2,…,N-m+ 1。
(2)计算矢量X(i)和其他向量X(j)间的距离:

式中:j= 1,2,…,N-m+ 1;k= 0,1,…,m- 1,i≠j。


计算其均值可得:

(4)将维数增加到m+ 1,同时重复步骤(2)、(3),可得:

(5)当时间序列X(i)的长度N为有限值时,可将样本熵定义为:

由式(16)可知,参数m,r,N的取值对于样本熵值的计算准确性相当重要。根据文献[25]以及多次试验,发现预先取m=2,r=(0.1~0.25)δ(δ为原始数据标准差)时,能使样本熵的统计特性得到最有效的表达,结果更能真实的反映信号特征。
2 基于NLM-CEEMDAN 和样本熵的水电机组振动信号去噪
由CEEMDAN 理论可知,通过CEEMDAN 分解所获得的若干个固有模态分量的局部频域是从高频到低频变化的,而原信号所含的噪音主要集中于前几个高频分量中。引入样本熵算法对IMF分量集合进行计算,IMF分量的样本熵值越大,说明该分量越不规则,含噪声越多,反之则反。
基于NLM-CEEMDAN 和样本熵的振动信号去噪方法的流程如图1所示,具体步骤为:
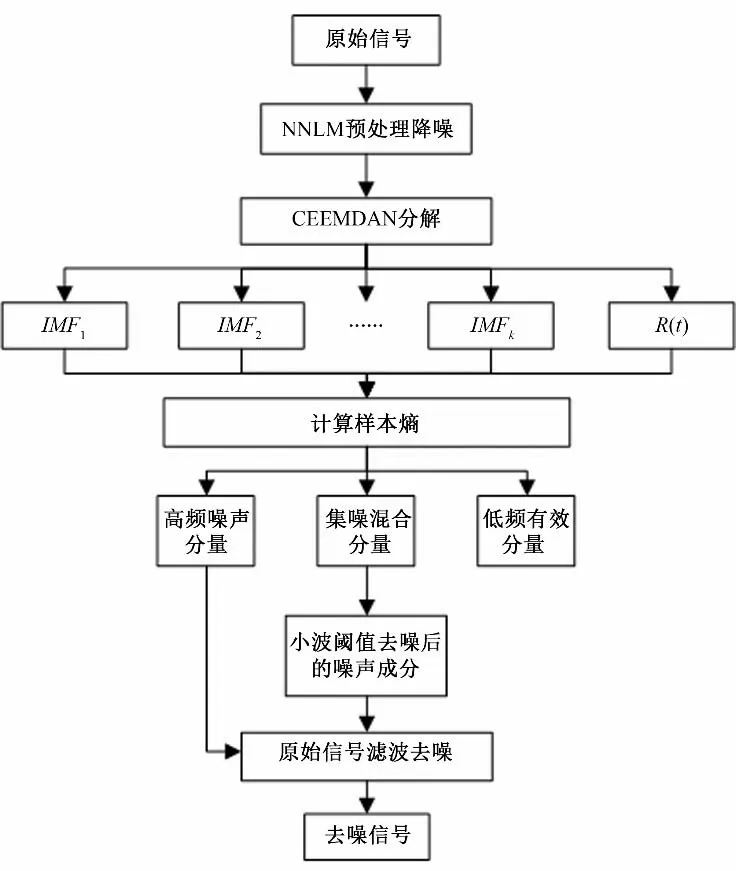
图1 基于NLM-CEEMDAN和样本熵的信号去噪流程Fig.1 Process of signal denoising method based on NLM-CEEMDAN
(1)先利用NLM 算法对水电机组振动信号X(t)预处理降噪,后将预处理信号进行CEEMDAN 分解获得一系列的固有模态分量IMFk(t)和一个趋势分量R(t);
(2)经多次试验,设置样本熵算法的模式维数m= 2,相似容限系数r= 0.2δ,并分别计算各模态分量和趋势分量的样本熵值;
(3)根据样本熵值的大小,将分量集合划分为高频噪声分量、信噪混合分量和低频有效分量三部分,并且进一步利用小波阈值去噪方法从信噪混合分量中滤出噪声成分。
(4)最后从原始信号中滤除高频噪声分量和信噪混合分量中的噪声成分即可完成水电机组振动信号的去噪。
3 仿真分析
3.1 仿真信号的构造
水电机组的摆度信号是机组的重要监测指标,为验证基于NLM-CEEMDAN 和样本熵的振动信号去噪方法的有效性,本文选择水电机组摆度信号进行仿真分析。水电机组摆度主要受到机械激振和水力激振的影响,机械激振一般以中频(1、2、3倍转频)为主,水力激振一般以低频(0.2~0.45 倍转频)为主,故构造仿真模拟信号如下[26]:

式中:A1~A6分别为20、4.5、2.55、1.5、0.4、0.3 μm;f1~f6分别为1.25、2×1.25、3×1.25、4×1.25、0.2×1.25、0.3×1.25 Hz。采样频率取1 000 Hz,可得原始未加噪仿真信号如图2 所示。对原始未加噪仿真信号叠加一个信噪比为20 dB 的高斯白噪音,得到的仿真加噪信号如图3所示。
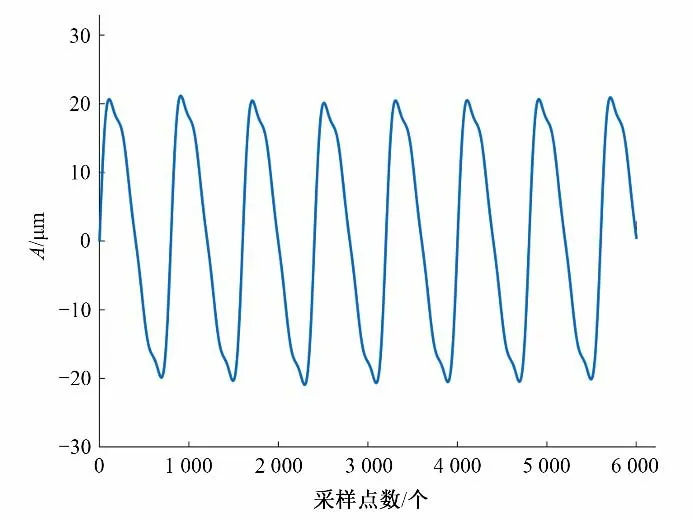
图2 仿真未加噪信号Fig.2 Simulation without noise signal
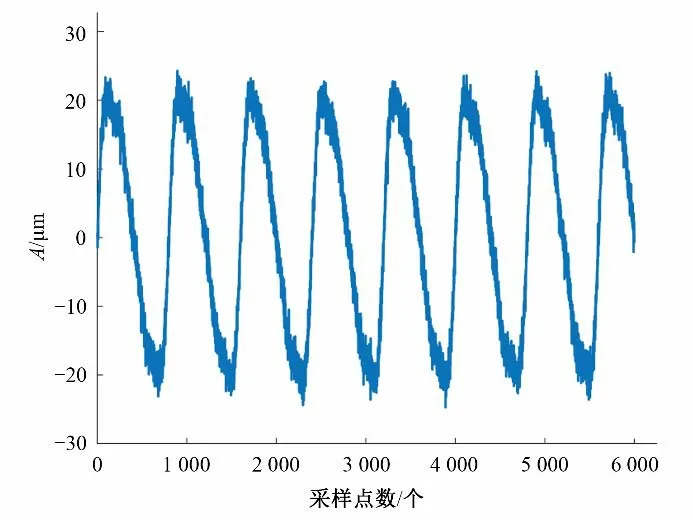
图3 仿真加噪信号Fig.3 Simulation noise signal
3.2 仿真信号的CEEMDAN分解
为对仿真加噪信号进行NLM 预处理降噪,在结合文献[27,28]所提的NLM 参数设置方法的基础上,进行多次试验,发现设置NLM 参数λ= 0.3σ(σ为仿真加噪信号的标准差),K= 20,P= 12 时能较好的滤除信号中的背景噪声,同时很好地保存信号中的有效信息,方便后续对预处理信号的处理。
对预处理信号进行CEEMDAN 分解时,需要对加入原信号的噪声幅值系数ε、执行CEEMDAN 的总次数M和最大允许迭代次数MaxIter进行合理的设置。加入噪声幅值与理想信号的标准差εn服从如下规律[29]:

ε值越小,则εn越小,即分解精度越高,但当ε过小时,可能不足以引起信号局部极值点的变化,从而使加入噪声以改变信号的局部时间跨度失去意义[30]。而M和MaxIter越大则信号分解越完备,但当M和MaxIter过大时会导致效率过低,耗时增加,不利于信号实时监测分析。
经过多次试验,设置参数ε=0.2,M=1 000,MaxIter=1 000 后对经NLM 预处理降噪后的信号进行CEEMDAN 分解,可以得到11个IMF分量和1个趋势分量R,m 如图4所示。计算这些分量的样本熵,结果如表1所示。

表1 仿真分析时各分量的样本熵Tab.1 Sample entropy of each component for simulation analysis

图4 仿真信号的CEEMDAN分解结果Fig.4 CEEMDAN decomposition of the simulation signals
为了更方便看出仿真分析时各分量的样本熵值的变化趋势,作其趋势分布如图5所示。
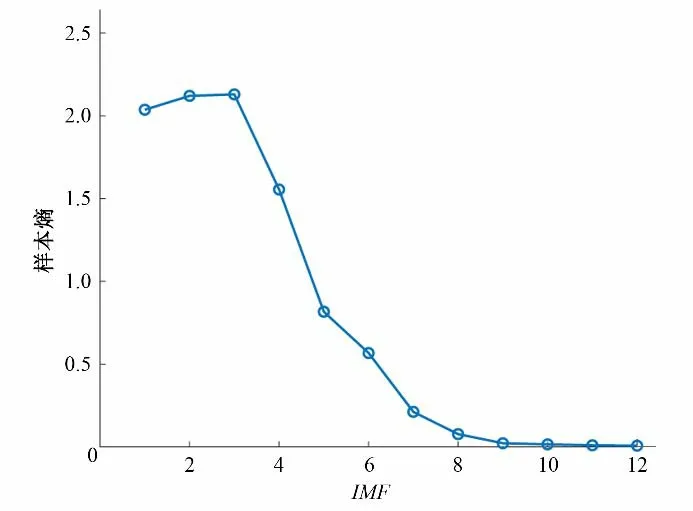
图5 仿真信号各分量样本熵值Fig.5 Sample entropy of each component for simulation analysis
从图5中能明显看出IMF1、IMF2、IMF33个分量的样本熵值远大于其他分量,而中间的IMF4、IMF5、IMF6分量的样本熵值则是大小居中,剩余分量的样本熵值基本都很小。由此可将前3个分量IMF1、IMF2、IMF3划分为高频噪声分量,中间3 个分量IMF4、IMF5、IMF6划分为信噪混合分量,剩余分量则划分为低频有效分量。通对信噪混合分量进行小波阈值去噪,筛选出其中的噪声成分,之后在仿真加噪信号中滤除高频噪声分量和筛选出来的噪声成分,完成水电机组摆度仿真信号的去噪。
3.3 分量重构与滤波去噪方法的对比
分解分量重构是目前常用的获取去噪信号的方法,该方法通过类EMD 算法将原始信号分解,将所得到的IMFS分量直接或者滤波降噪后重构来获取去噪信号。但该方法易受类EMD算法分解过程中存在的模态混叠以及端点效应等问题的影响,使得去噪重构信号中仍存在一定量的噪声。针对上述问题,本文提出一种新的滤波去噪方法获取去噪信号,不同于以往利用类EMD 算法获取有效信号成分,新方法是通过类EMD 算法将原始信号中的噪声部分筛选出来,再从原始信号中滤除噪声部分,进而可获得噪声成分更少的去噪信号。
为便于对不同方法的去噪性能进行定量对比,下面定义了信噪比SNR和均方根误差RMSE[31],且信噪比越大,均方根误差越小,去噪效果越好。
(1)信噪比SNR。
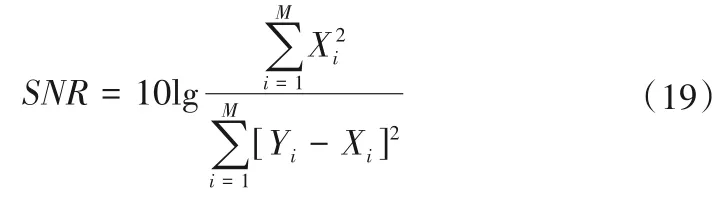
(2)均方根误差RMSE。

式中:M为采样点数;Xi为原始未加噪仿真信号;Yi为去噪后的信号。
下面利用CEEMDAN分解对分解分量重构和滤波去噪两种方法进行性能对比,限于篇幅,此处仅给出去噪效果性能比较,结果如表2所示。

表2 两种方法的去噪性能Tab.2 Denoising performance of two methods
从表2可以发现分解分量重构法的去噪性能指标明显差于滤波去噪法,说明滤波去噪的方法所得的去噪信号更为接近原始未加噪仿真信号,其去噪效果更好。
3.4 不同去噪方法的对比分析
为了验证本文所提出的NLM-CEEMDAN 和样本熵去噪方法在水电机组摆度信号去噪中的有效性,分别采用小波阈值去噪方法、CEEMDAN 去噪方法和本文提出的NLM-CEEMDAN 去噪方法对仿真加噪信号进行去噪处理,并通过去噪波形图以及去噪性能指标来对不同方法的去噪效果进行对比分析。
小波阈值去噪过程中的参数选取会对原始信号的去噪效果产生较大的影响。本文根据文献[15]中的小波阈值去噪参数的确定方法,将仿真加噪信号的小波阈值去噪参数设置为:sym9 小波基函数、分解层数为6、heursure 阈值准则和硬阈值函数。去噪后的波形图如图6~8 所示,去噪效果性能指标如表3所示。
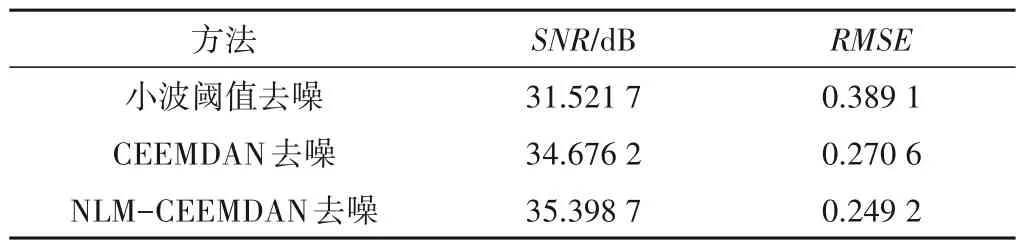
表3 不同方法的去噪性能Tab.3 Denoising performance of different methods
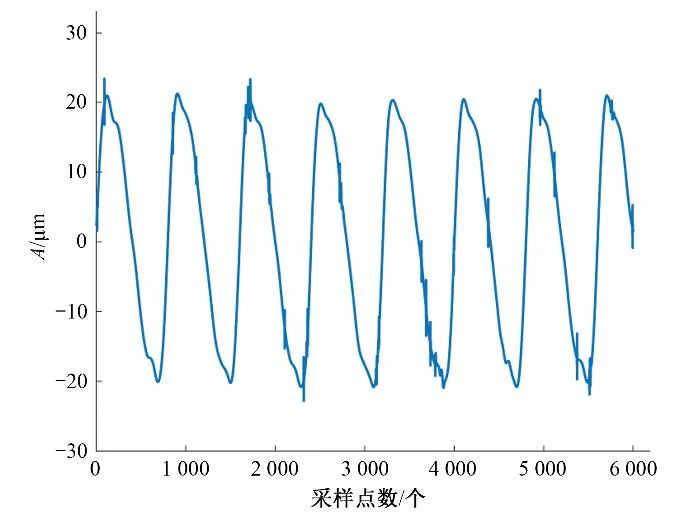
图6 小波阈值去噪信号Fig.6 De-noised simulation signals by wavelet threshold
将图6 中小波阈值去噪信号与图2 中的仿真未加噪信号相比较,发现小波阈值去噪已基本能滤除仿真加噪信号中的大部分噪声,但去噪信号波形中的毛刺现象较为明显,去噪效果不太理想。
将图7和图8中的波形同图2波形相比,可以发现两种去噪信号都基本很好地实现了仿真加噪信号的去噪。但CEEMDAN滤波去噪信号波形曲线过于光滑,说明在舍弃分量的同时也丢失了部分有效信息。而NLM-CEEMDAN 去噪则是把CEEMDAN 滤波去噪方法所舍弃的信噪混合分量进行降噪处理,从而在保持波形光滑的同时,使得原始信号中的一些有效特征也得到相应保留。
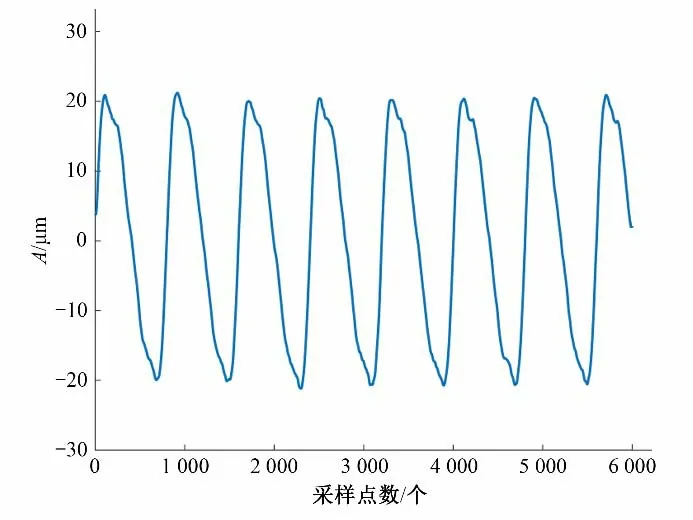
图7 CEEMDAN去噪信号Fig.7 De-noised simulation signals by CEEMDAN
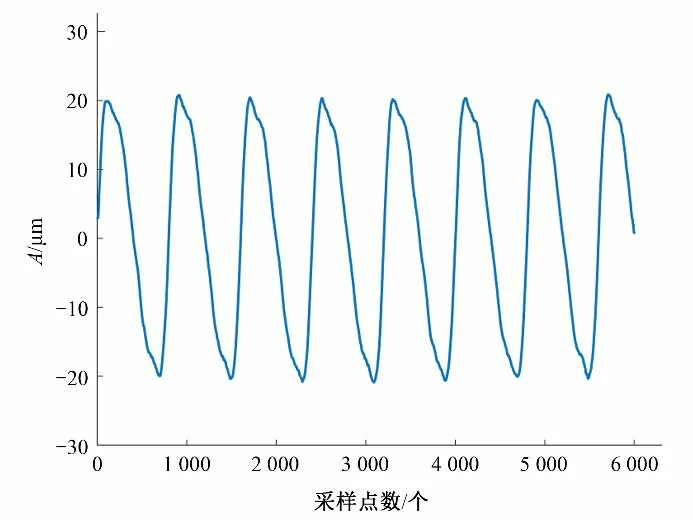
图8 NLM-CEEMDAN去噪信号Fig.8 De-noised simulation signals by combined method
根据去噪性能评判标准,对比表3 中的数据可知,NLMCEEMDAN 去噪方法的去噪效果最好,相较于小波阈值去噪方法和CEEMDAN 滤波去噪方法,信噪比SNR分别提高3.877 和0.722 5 dB,均方根误差RMSE分别降低0.139 9和0.021 4。
综上,通过对不同去噪方法的去噪信号的波形特征和去噪性能评价指标进行对比分析,可以发现NLM-CEEMDAN 联合去噪的方法是明显优于其他两种方法。
4 实例分析
4.1 实例信号的采集
为了验证本文所提出的NLM-CEEMDAN 和样本熵的去噪方法在水电机组振动信号去噪过程中的有效性,进一步选取水电机组摆度监测实例进行分析,
水电机组摆度信号采集过程中的机组转速为250 r/min,试验的采样频率fs为2 048 Hz,截取采样数据中的6 000 个点进行分析,以确保信号处理分析中的特征参数能全面真实地反映实际工况。
4.2 实例分析
水电机组上导摆度实测信号波形如图9 所示,其中包含了大量毛刺。先对该实测信号进行NLM 预处理降噪,再对预处理信号进行CEEMDAN 分解,得到11 个IMF分量1 个趋势分量。计算每个分量的样本熵值,结果如表4 所示。同样根据各分量样本熵值大小将前3 个分量IMF1、IMF2、IMF3划分为高频噪声分量,中间3 个分量IMF4、IMF5、IMF6划分为信噪混合分量,剩余分量则划分为有效信息分量。由小波阈值去噪算法筛选出信噪混合分量中的噪声成分,最后从上导摆度实测信号里滤除高频噪声分量和筛选出的噪声成分,完成水电机组上导摆度实测信号的去噪。从图10 中可以看出上导摆度实测信号中的噪声得到了有效的滤除。

表4 摆度信号各分量的样本熵Tab.4 Sample entropy of each component for throw signals
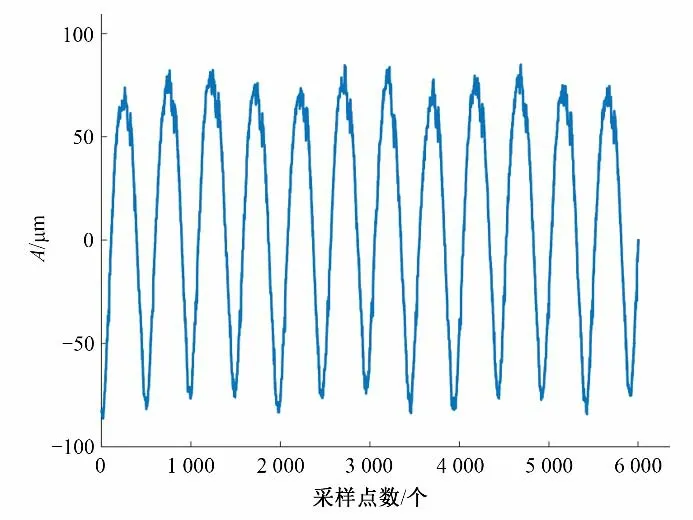
图9 上导摆度实测信号Fig.9 Real signals of upper guide bearing throw
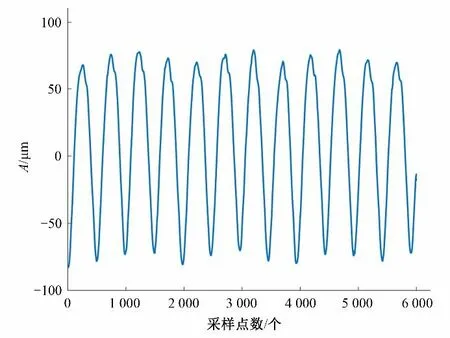
图10 去噪后的上导摆度信号Fig.10 De-noised upper guide bearing throw signals
由于无法从实测信号得到原始理想的摆度信号值,无法直接计算SNR和RMSE,下面定义了信号去噪前后的噪声抑制比(Noise rejection ratio, NRR),来表征去噪后有效信号的突出程度,该值越大,则去噪后的有效信号越突出[32]。

3 种去噪方法处理摆度实测信号后的噪声抑制比如表5 所示。从表5中可以看出NLM-CEEMDAN 去噪的NRR值最高,滤波效果最好,小波阈值去噪次之,CEEMDAN去噪效果最差。

表5 不同方法去噪后的摆度信号噪声抑制比Tab.5 The noise rejection ratio of de-noised swing signals by different methods
水电机组下导、水导摆度实测信号波形分别如图11、13 所示。对这两种信号NLM 预处理降噪后进行CEEMDAN 分解,都分别得到11 个IMF分量和1 个趋势分量。计算每个分量的样本熵值,计算结果如表4 所示。根据样本熵值,进行分量的划分,依据同样的方式完成水电机组下导、水导摆度实测信号的去噪,分别如图12、14所示。
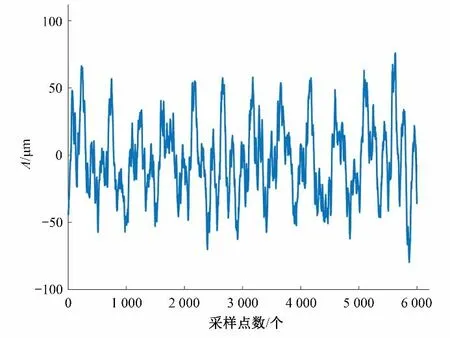
图11 下导摆度实测信号Fig.11 Real signals of lower guide bearing throw
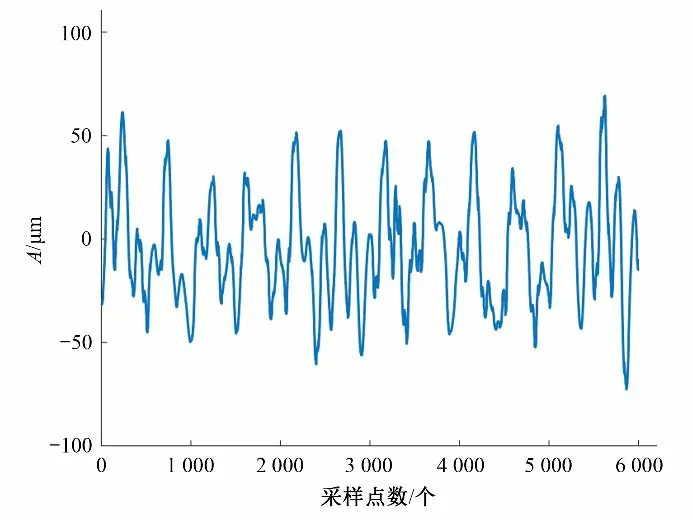
图12 去噪后的下导摆度信号Fig.12 De-noised lower guide bearing throw signals
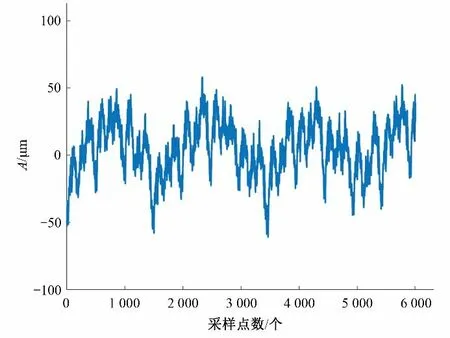
图13 水导摆度实测信号Fig.13 Real signals of turbine guide bearing throw

图14 去噪后的水导摆度信号Fig.14 De-noised turbine guide bearing throw signals
从图中可以看出,基于NLM-CEEMDAN 和样本熵的方法能够有效地去除水电机组下导和水导摆度实测信号中含有的大量背景噪声。同样计算下导、水导摆度信号的3 种不同去噪方法的噪声抑制比。从表5 中可以看出,NLM-CEEMDAN 去噪的方法去噪效果最好。
5 结 论
本文提出了一种基于NLM-CEEMDAN 和样本熵的水电机组振动信号去噪方法。通过该方法分别对水电机组摆度仿真信号和3种实测信号进行去噪分析,并与小波阈值去噪、CEEMDAN 去噪的方法进行对比试验,比较波形差异和去噪性能指标大小后,得到以下结论。
(1)相较于传统的原始信号分解分量重构的方法,本文提出的从原始信号中直接滤除噪声成分的方法使去噪后的振动信号去噪效果得到极大的提高,更接近于真实振动信号。
(2)基于NLM-CEEMDAN 和样本熵的振动信号去噪方法对于仿真信号及实测信号的去噪效果都优于传统方法,能有效滤除噪声成分,为设备振动信号在线监测提供有力帮助。
(3)本文的研究成果也可广泛应用到核电、化工等行业的其他高安全装备振动信号去噪。
猜你喜欢
大电机技术(2022年2期)2022-06-05
基层中医药(2021年12期)2021-06-05
英美文学研究论丛(2018年1期)2018-08-16
能源(2017年7期)2018-01-19
能源(2018年7期)2018-01-15
纺织科学研究(2017年6期)2017-07-03
中国工程咨询(2016年2期)2016-02-14
水电站机电技术(2014年6期)2014-09-26
水电站机电技术(2014年1期)2014-09-26
电测与仪表(2014年23期)2014-04-04