
避障机器人路径规划算法的研究
2023-06-25 07:42宾海茵吴超龙赵琳
现代信息科技 2023年7期
宾海茵 吴超龙 赵琳


摘 要:结合移动机器人的实际应用场景,针对常规算法规划出的路径存在折点多、转弯角度过大、与障碍物距离较小、搜索的路径较长等问题,对在栅格地图下混合全局路径规划与局部路径规划算法进行了研究,采用人工势场算法与蚁群算法混合,为移动机器人规划出全局最优路径,同时实时躲避局部障碍物。经过仿真测试,移动机器人可以根据全局路径规划的路径得到最优的整体路径,通过局部路径规划算法避开局部区域的障碍物,使移动机器人能够从起点平稳无碰撞地行驶至目标点。
关键词:智能算法;机器人路径规划;移动机器人;避障机器人
中图分类号:TP242 文献标识码:A 文章编号:2096-4706(2023)07-0157-04
Abstract: Aiming at the problems of many inflection points, too large turning angle, small distance from obstacles, and long search path in the path planned by conventional algorithms, this paper combines with the practical application scenario of mobile robots, studies the hybrid global path planning and local path planning algorithms under grid maps, uses the hybrid artificial potential field algorithm and ant colony algorithm to plan the global optimal path for mobile robots, and avoids local obstacles at the same time. Through the simulation test, the mobile robot can obtain the optimal overall path according to the path planned by the global path planning, and avoid the obstacles in the local area through the local path planning algorithm, so that the mobile robot can travel without collision from the starting point to the target point smoothly.
Keywords: intelligent algorithm; robot path planning; mobile robot; obstacle avoidance robot
0 引 言
移動机器人的路径规划是机器人学的重要研究领域,也是人工智能和机器人学的一个非常重要的结合。不管移动机器人的应用如何,在工作过程中往往需要沿着工作区域的最佳路径或非最佳路径进行(如最小路径长度、最合适路径等)。路径规划问题可以看作是一种受制约的优化问题,它需要完成路径规划,自我定位和避障操作,路径算法的改进实质上也是满足一定约束条件下的改进问题。路径规划是移动机器人导航中最重要的任务之一,通过路径规划移动机器人在无人控制的情况下,可以对环境已“清楚”会出现的障碍物以及可能出现的障碍物进行分析和避让,即在有障碍物的环境中寻找从开始状态到目标状态不发生碰撞的路径,从而进行自主行驶完成相应任务。机器人面对复杂多变的室外环境,通过对算法的优化改进来提高机器人的性能,路径规划的实时避障性、路径平滑性、规划有效性就成为了路径规划算法的核心研究内容。
因此将对移动机器人路径规划技术进行分析和研究,结合机器人的实际应用,考虑机器人在跟随路径时的适应性,为移动机器人规划最优路径,探讨了人工势场算法和蚁群算法的融合算法,利用蚁群算法进行全局路径规划,再利用人工势场算法进行局部路径规划,并针对人工势场算法和蚁群算法可能会出现的问题,进行改进和优化,使移动机器人获得一条可以在实际应用中绕过障碍物安全平稳到达目标点的最优平滑路径。
1 国内外发展现状
随着科技的发展,在移动机器人路径规划领域,国内外许多研究学者进行了深入研究和改进,取得了许多成果。根据机器人对环境信息的理解程度,路径规划问题可分为环境信息完全已知的全局路径规划和环境信息不完全了解或部分不了解的局部路径规划两类[1]。其中,全局路径规划主要有拓扑法、栅格法、可视图法等。局部路径规划方法主要有人工势场法、遗传算法、神经网络算法等。目前,路径规划技术虽然取得了相当大的成果,但方法之间有优缺点[2],任何一种方法都不能适用于任何环境。虽然我国对移动机器人的起步较晚,但是在国家的大力支持下,我国对移动机器人技术日渐成熟[3]。
根据路径算法原理特点进行划分,目前常用的路径规划方法可以分为传统算法和智能仿生算法两类。传统的人工势场算法常有局部最小值不易脱离和无法到达目标点的问题,为解决这些问题,张琪等[4]针对传统人工势场法在避障路径规划存在的缺陷,增加逃逸子因数,在Krogh算法的基础上对人工势场进行改进并提出了新的人工势场函数,修复了无法到达障碍物附件上的目标点的问题,并验证了改进人工势场算法的有效性。
随着环境的复杂性和空间性的增加,对移动机器人的需求越来越大,传统的算法结合已经没办法满足需求,它的实用性下降,计算量增大,由此,机器人领域的学者提出了一系列智能优化算法。例如,神经网络与遗传算法的结合、粒子群与遗传算法的结合、粒子群与灰狼算法结合。李真等[5]针对粒子群算法易陷入局部最优的缺点,提出了最差改进策略和最优粒子扰动策略,并将灰狼算法的优势引入粒子群算法进一步提高算法的搜索能力,由此提高了粒子群的多样性以及最优粒子进行扰动使粒子群跳出局部最优。
随着近年来人工智能技术的兴起。传统与智能路径规划算法的日益成熟推动了两者的结合,例如栅格法与遗传算法、粒子群算法等的融合、人工势场法与人工神经网络(ANN)、蚁群算法以及遗传算法等的融合。例如,段建民等[6]通过引入填平势场使势场函数跳出局部极小值,并利用人工势场算法对遗传算法规划路径进行优化,在改进的基础上寻求全局最优解的策略。李航宇等[7]采用了栅格法环境建模,对遗传算法上引入删减及增添算子,采用了动态自适应策略,对算法的运算效率有了很大的提高。
2 机器人路径规划
在机器人领域的研究,移动机器人路径规划已经取得了大量的成果,但是对于某些实际场景仍然有局限性。移动机器人在不同的应用领域有不同的要求和问题[8],因此,在关注具体需求和实际应用场景的同时,可以保证全局路径规划的有效性和及时性,优化拐角的路径、提高平滑性、确保移动机器人安全绕过障碍到达终点,能够得到对工作环境更合适的最佳路径规划路线。
2.1 栅格法绘制地图
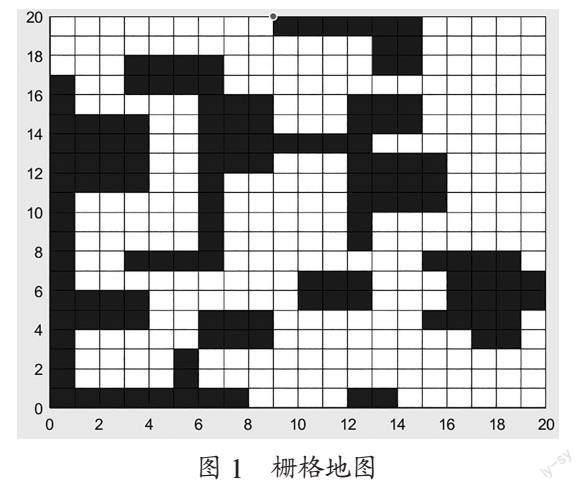
移动机器一般使用栅格法构建空间环境,实质上就是对机器人工作空间进行单元分割。空间环境通常使用四叉树或八叉树来表示,并通过规划算法进行路径搜索。栅格数据就是将分割后的各单元网格赋予相应的属性值来象征实体,使场景所有物进行二值化,矩阵中的1代表障碍物,对应黑色栅格,0代表可移动空间,对应白色栅格。如图1所示。
2.2 蚁群算法规划路径
2.2.1 蚁群算法原理
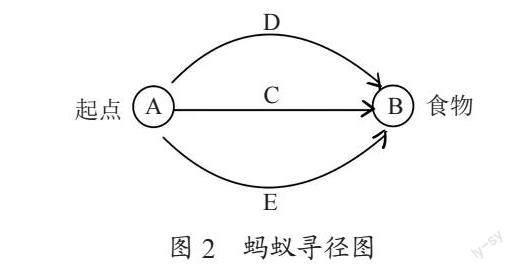
蚁群算法由Marco Dorigo等提出的一种用于寻找优化路径的概率型算法,他们在研究观察蚂蚁觅食过程中,发现蚁群的协作上表现出一些智能的行为[2]。从图2可以看出,假设蚂蚁从蚁巢即起点A向食物源B行走,第一波蚂蚁行走方向是随机的,蚁群的选择有三条路径,刚开始三条路径上的蚂蚁数量差不多。蚂蚁寻到食物立即将部分食物立即返回运输,由于路径C距离较短,蚂蚁很快能在起终点往返,重复频率快,蚂蚁在单位时间内来回移动的次数越多,它们留下的信息素就越多,更是吸引更多的蚂蚁选择C路径,因此越来越多的蚂蚁聚集到最短路径上,得到一条从起点到终点的最优路径。
2.2.2 蚁群算法的仿真
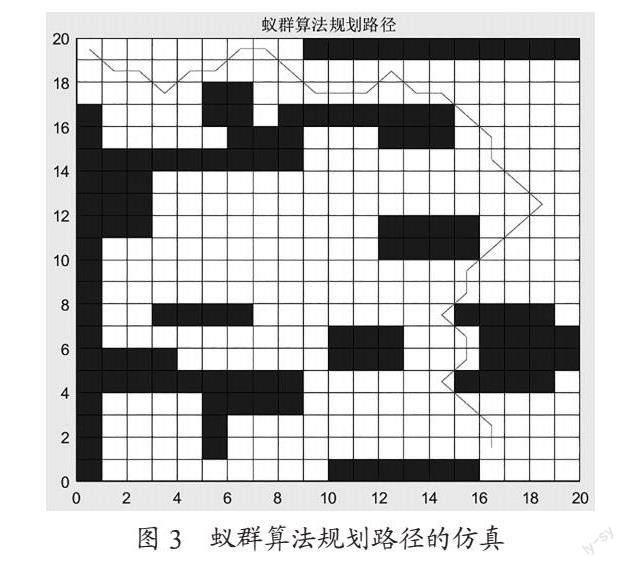
通过图3中的蚁群算法仿真可以看出,可以在栅格地图中寻到一条最优路径,并且可以避让障碍物,因此将引用蚁群算法为机器人规划全局路径。但是应用到实际生活中,仍存在一些拐角过多、路线不够平滑的缺点。
2.3 人工势场法规划路径
人工势场法由Khatib提出的一种虚拟力法,其基本内容是将移动机器人所在环境抽象化,即周围环境下的机器人运动抽象为一种人造的引力势场运动,重力电位场在环境中的目标点周围形成,斥力电位场在障碍物上形成。目标点对机器人产生引力,障碍物对机器人产生斥力,两者合力控制机器人的动作[9]。多用于局部路径规划。其优点是计算速度快,能在环境中实时避障,路径平滑且有一定的鲁棒性。从图4可以看到就相较于蚁群算法图3规划出的路径,人工势场规划的路径更平滑,使实际应用中机器人的行驶更安全。从图4人工势场算法规划的仿真可以观察到,所规划的路径平滑无碰撞到达终点,这符合最初在实际情况下机器人需要考虑的问题,为改善算法问题,这里引入人工势场算法,结合人工势场的作用机理,融合算法的特点来为机器人进行局部路径规划。
2.4 人工势场-蚁群融合算法规划路径
通过对蚁群和人工势场算法的仿真,可以观察到,蚁群算法的路径在经过拐角的时候紧贴障碍物,所规划的路径出现多处折点,在机器人的实际应用中,需考虑机器人的尺寸和运动学以及动力学的约束,否则容易与障碍物发生碰撞,且路径的不平滑性,对于机器人而言,可能存在不易转弯的困难,而多余的折点也是不必要出现的。通过人工势场算法的仿真,雖然其路径是一条平滑的路径,但是由于机器人行进的过程中只考虑最近的障碍物,面对复杂道路,可能使得规划出的路径不是最优解。传统人工势场算法并不适用作全局路径规划,一般用作局部路径规划。
因此从机器人实际应用的角度出发,结合实际考虑问题,利用单一算法其特点,将人工势场算法与蚁群算法混合,使用蚁群算法进行全局路径规划,根据全局规划路径再使用人工势场方法进行局部路径规划。为在工作空间活动的机器人设计最佳且平滑的路径,使移动机器人能平稳从起始点到终点无碰撞且平滑的到达终点。
3 融合算法路径规划仿真
3.1 地图构建
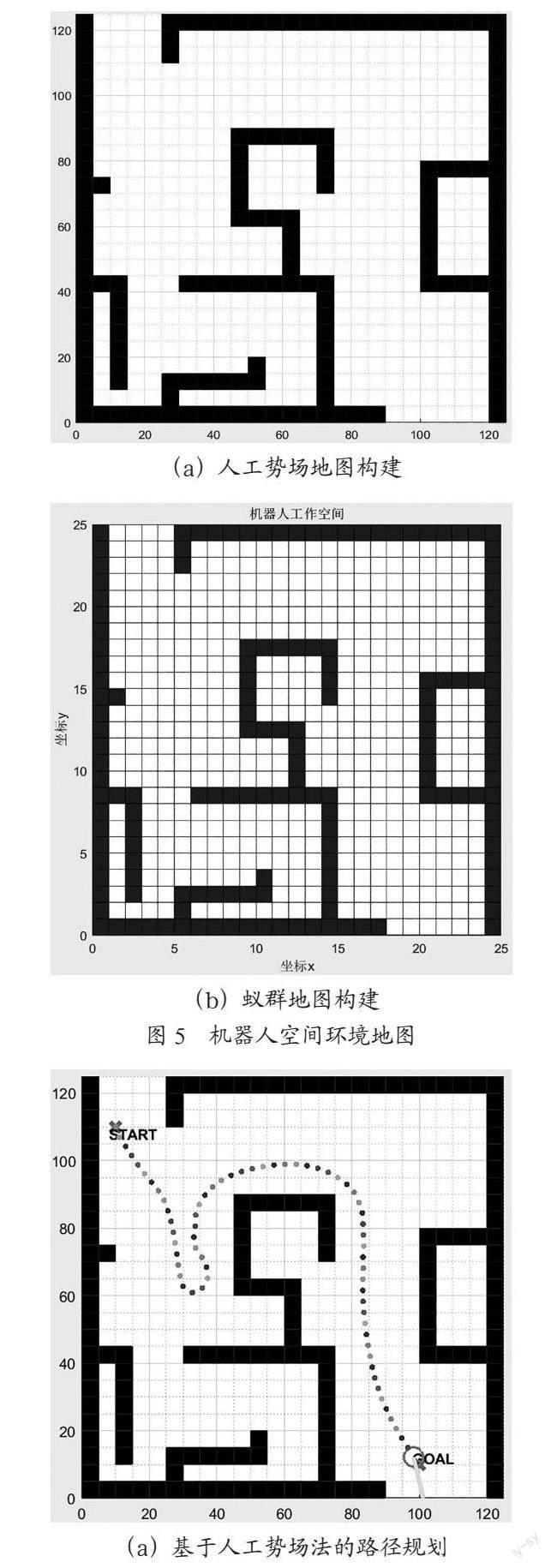
仿真实验将利用MATLAB进行路径规划算法仿真。其仿真环境为25×25的栅格地图。考虑到机器人的尺寸,为了更方便分析不同算法的不同路径和最终混合的效果,更直接地观察移动机器人无碰撞行驶的过程,将人工势场地图的方格大小设为5,蚁群栅格地图方格大小设为1,通过地图的比例缩小,减少蚁群算法的计算量和收敛速度的同时兼顾解决全局路径规划与局部路径规划的主要问题,此外,两者地图坐标是可以相互对应的,所规划的路线可以通过坐标的转换在相同的空间地图内行驶。如图5所示。
3.2 单一算法规划路径仿真
使用蚁群算法规划,得出如图6中的规划路径,但其中机器人被看作一个质点,路线紧贴障碍物,没有考虑到机器人的尺寸。如果应用到机器人上则会发生碰撞,且所规划的路径不平滑,这对机器人的移动产生阻碍。
使用人工势场算法规划仿真,规划出了一条平滑的路径,但由于算法的每次检测周期只考虑距离最近的障碍物,面对复杂的环境无法做出最佳策略,可能规划出的对于全局路径规划不是最优解的线路。
将势场蚁群结合,可以解决上述问题。使用蚁群算法进行全局路径规划,将规划的全局获得的路径传送到人工势场算法中,人工势场算法就会沿着全局运行移动,分段式的行驶,逐渐靠近目标点。
3.3 两种算法结合的仿真
图7开始对机器人移动路径进行仿真实验,观察全局路径规划的蚁群算法与对局部路径规划的人工势场算法的结合效果。
相较于算法结合之前规划出来的路径,该仿真可以观察到机器人更加安全的通过拐点并与障碍物保持安全的距离,避免移动机器人和障碍物发生碰撞,增强了其平滑性,使机器人更平滑到达终点,规划出工作空间的最优路径,使用更少的时间完成从起点到终点的移动。在实际应用中,机器人可以更安全平稳的从起点向终点移动,解决了算法出现多折角和不是最优解的问题。
4 结 论
移动机器人在实际应用中受很多复杂因素的影响,因此机器人在自主移动中需要考虑的问题有很多。为机器人更适应环境,考虑到实际的应用场景,以是否能安全通过拐角、路径平滑性和最优路径的问题展开对路径算法的研究,通过蚁群算法的全局与人工势场法的局部路径规划结合,为机器人规划出一条安全平稳的路径。通过仿真证明,经过两者的结合,所规划的路径可以更好让机器人适应工作环境并安全平稳的从起点移动到终点。
參考文献:
[1] 刘自强.无人驾驶低速电动车的路径规划和控制系统的设计与实现 [D].成都:电子科技大学,2020.
[2] 吴保胜,郭宇,王发麟,等.基于改进蚁群算法的线缆路径规划技术研究 [J].计算机工程与应用,2018,54(10):236-241.
[3] 孙凌宇,冷明,朱平,等.移动机器人路径规划算法的研究 [J].井冈山大学学报:自然科学版,2010,31(2):56-59+64.
[4] 张琪,田甜,栾天宇,等.基于改进人工势场算法的无人船路径规划 [J].舰船科学技术,2022,44(9):63-68+78.
[5] 李真,王帆,王冉珺.一种结合灰狼算法的粒子群优化算法 [J].计算机测量与控制,2021,29(10):217-222.
[6] 段建民,陈强龙.基于改进人工势场-遗传算法的路径规划算法研究 [J].国外电子测量技术,2019,38(3):19-24.
[7] 李航宇,郭晓利.考虑多因素的自适应遗传算法机器人路径规划 [J].制造业自动化,2022,44(10):76-78+95.
[8] 王梓强,胡晓光,李晓筱,等.移动机器人全局路径规划算法综述 [J].计算机科学,2021,48(10):19-29.
[9] 郭银景,刘琦,鲍建康,等.基于人工势场法的AUV避障算法研究综述 [J].计算机工程与应用,2020,56(4):16-23.
作者简介:宾海茵(2000—),女,汉族,广西贵港人,本科在读,研究方向:智能控制系统的设计;吴超龙(2000—),男,汉族,广西贵港人,本科在读,研究方向:智能控制系统的设计;赵琳(1981—),女,汉族,河北定州人,讲师,硕士研究生,研究方向:通信技术、智能控制技术。
猜你喜欢
现代情报(2023年6期)2023-05-27
北京航空航天大学学报(2022年6期)2022-07-02
大电机技术(2022年1期)2022-03-16
四川轻化工大学学报(自然科学版)(2021年3期)2021-08-30
中国海上油气(2021年2期)2021-06-09
数码世界(2017年5期)2017-12-29
制造技术与机床(2017年3期)2017-06-23
价值工程(2016年32期)2016-12-20
电脑知识与技术(2016年8期)2016-05-19
智能系统学报(2015年4期)2015-12-27
