
基于GPS电子浮标的水文应急测流系统
2023-06-21 09:28:16朱永红刘沂轩刘昱宋梦雨
现代信息科技 2023年9期
朱永红 刘沂轩 刘昱 宋梦雨
摘 要:针对灾害应急场景设计了水文应急测流系统。系统利用随水流运动的GPS电子浮标实时位置信息计算水流速度,结合GIS技术对浮标位置、轨迹、当前状态、实时流速等数据进行测流过程展示;介绍了系统架构、电子浮标外观结构和硬件设计、上位机功能模块设计,并介绍了上位机软件中针对电子浮标的精确定位问题、数据刷新的实时性问题、历史数据的存储方式问题的解决方案;实验表明浮标能够顺利采集定位信息并传输至云平台,上位机基于浮标数据能够进行流速流量的估算并显示,完成流速流量的测量。
关键词:水文;应急监测;浮标测流;GPS
中图分类号:TP311.5;TP393 文献标识码:A 文章编号:2096-4706(2023)09-0038-04
Abstract: The hydrological emergency flow measurement system is designed for disaster emergency scenarios. The system uses the real-time position information of the GPS electronic buoy that moves with the flow to calculate the flow velocity, and combines GIS technology to display the flow measurement process data of buoy position, trajectory, current state, real-time flow velocity and so on. The system architecture, electronic buoy appearance structure and hardware design, upper computer function module design are introduced. And it introduces the solutions of accuracy positioning problem for electronic buoy, real-time problem of data refresh, store method problem of historical data in the upper computer software. The experiments show that the buoy can successfully collect positioning information and transmit it to the cloud platform, and the upper computer can estimate and display the flow velocity and flow rate based on the buoy data to complete the measurement of flow velocity and flow rate.
Keywords: hydrology; emergency monitoring; flow measurement by buoy; GPS
0 引 言
水環境突发事件是世界上危害性最大的灾害之一,灾害过程中的水文数据能够为制定合理的抗灾抢险方案、指挥救援等提供有力的支撑[1]。但是灾害的恶劣环境中传统监测手段通常无法完成监测任务[2]。为了完成应急测流任务,文献[3]提出操作无人机携带测流装置到达测流地点进行远程测流,但是该方法在恶劣天气和不利地形下无法使用;文献[4]提出了利用互联网技术实现远程控制平台,但是没有给出数据感知方案;文献[5]研制了多功能智能测流航标,将测流装置和其他水文数据采集装置集成在大型航标上,该装备性能较强,但是成本较高;文献[6,7]中使用的浮标测流法是近年来灾害应急工作中有效的测流手段,随着技术的发展,电子浮标的出现更是使应急测流工作的自动化程度、数据精确度、操作安全性等大大提高。文献[8]中提出还可以将ADCP仪器装置在浮标上进行测流,并研究了浮标对测量效果的影响。但是基于电子浮标的测流系统的实现需要解决如下问题:
1)电子浮标的精确定位。电子浮标的位置信息是流速计算的基础,应急测流的电子浮标通常为抛弃型,性能较低,再加上灾害中的恶劣环境影响,如何保证定位数据精确性是一个难点。
2)数据刷新的实时性。系统测流过程需要展示测流状态,对数据刷新实时性要求较高,而电子浮标采用电池供电,能量有限,数据采集与传输的频率会影响浮标寿命,再加上系统利用GPRS将数据上报至云平台有响应时间,需要设计合理的均衡方案。
3)历史数据的存储形式。历史数据的存储不仅要考虑便于查询和处理,测流系统提供了历史回放功能,还需要同时考虑便于回放功能的实现。
1 系统架构
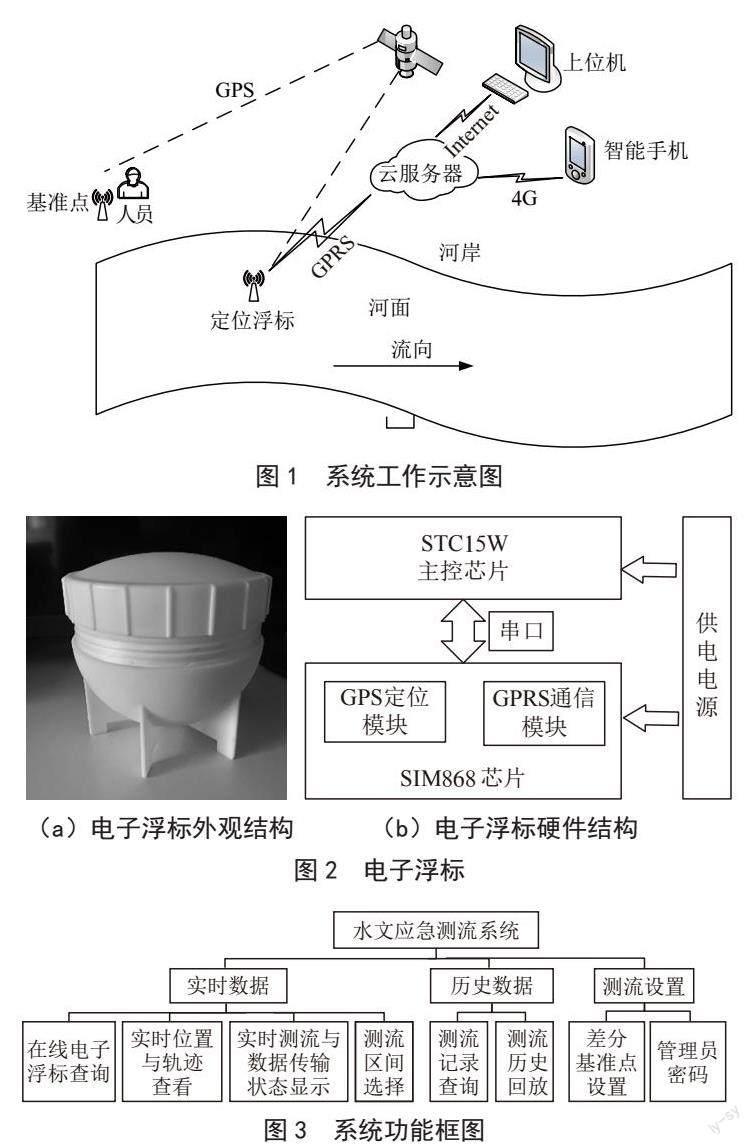
水文应急测流系统由节点、GPRS模块、运营商基站、OneNET云平台以及移动终端几个部分组成的,采用了终端-云-用户的系统架构[9]。系统工作示意图如图1所示。
为了提高灾害环境中操作该系统的安全性,电子浮标为低成本可抛弃型,将电子浮标以合适的方式投入待测水体上游附近,浮标随水流漂浮前进,利用GPS定位获取浮标实时经纬度信息和地面速度信息,并通过GPRS传输至云平台;上位机软件从云平台读取数据,进行处理,利用相关算法对水流速度进行估算,得到实时流速。系统将测流过程数据存放在云服务平台,可以提供历史回放、测流方式选择等功能,还可以接入其他水文应用系统,提供数据支持[10]。
2 GPS电子浮标
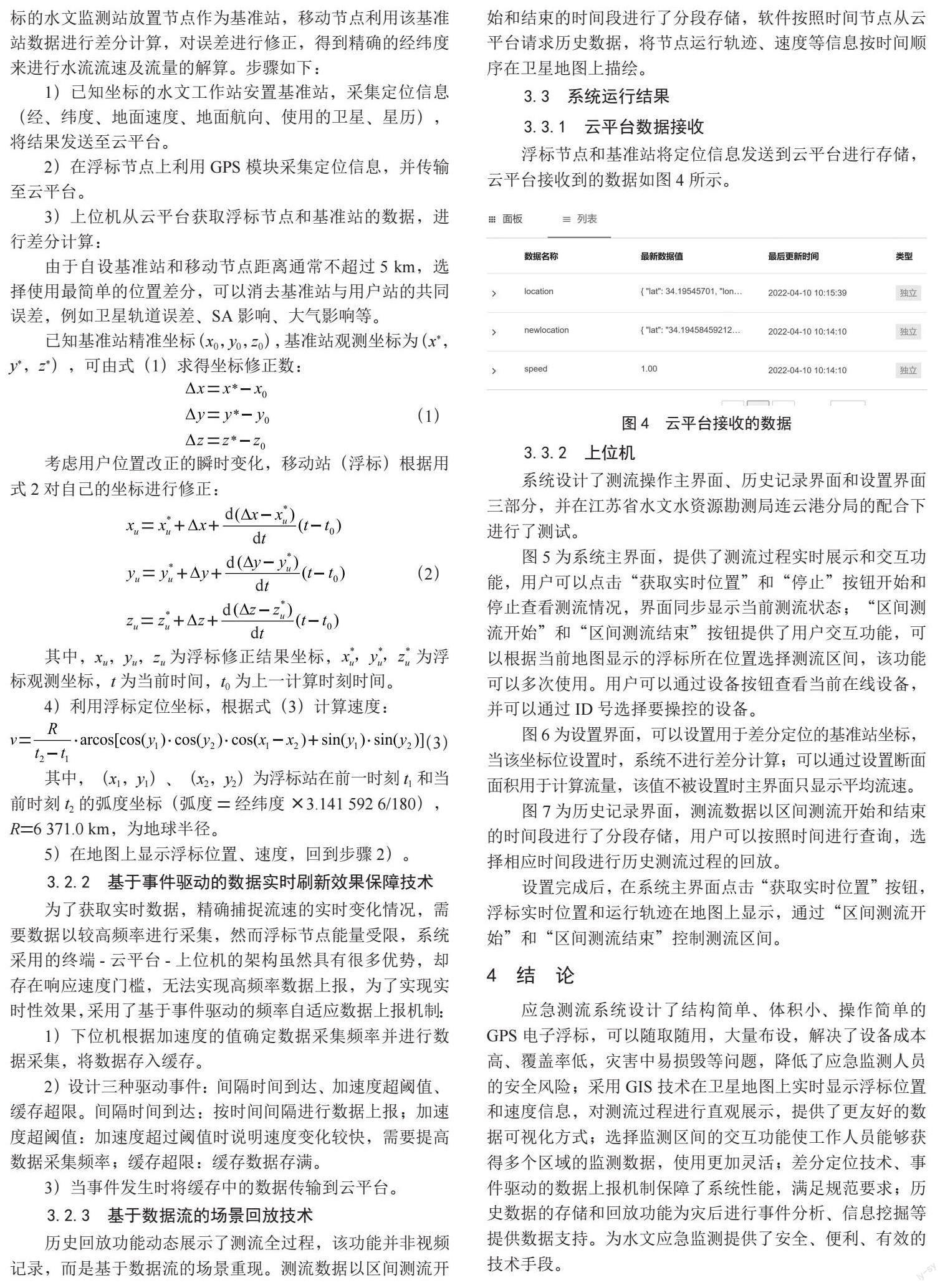
抛弃型电子浮标除了能够满足系统的功能需求,还需要考虑低成本、易操作、使用灵活等。电子浮标外观如图2(a)所示,底部设计阻力结构,减少水流与浮标的相对运动;半球结构底部灌胶,使浮标在水流中产生不倒翁效果,保持浮标姿态的同时使天线始终在水面上方,防止水体对信号的影响;螺旋上盖加密封圈提供高级别的防水效果。浮标尺寸为15(直径)×12(高),重量约600 g,灾害恶劣环境下可以较易存活,可以大量布设,以满足应急测流要求。
GPS电子浮标的硬件部分主要由主控模块(STC15W)、SIM868模块、电源模块等模块组成。其硬件结构如图2(b)所示。
2.1 主控模块
采用成本较低同时能满足系统计算需求的STC15W系列单片机作为主控模块,通过串口控制SIM868芯片进行数据的获取、处理与传输。
2.2 通信与定位模块
采用SIM868芯片实现定位与通信功能,SIM868是一款集多个功能与一体集成模块,利用GPS定位模块获取GPS经纬度信息;GPRS模块将数据传输至云平台。
2.3 供电模块
系统提供2种供电方式,2节3.7 V锂电池供电和5 V直流电源供电,可以根据需要进行选择。
3 上位机
3.1 系统功能
为了实现测流过程可视化并提供交互、历史数据查看等功能,系统上位机设计了三个功能模块,功能框图如图3所示。
单片机从SIM868定位模块读取GPS位置和地面速度数据,进行解析和处理,利用 SIM868GPRS通信模块,将数据发送至云平台。
具体功能如下:
1)在线电子浮标查询功能:可以从云端获取在线电子浮标信息,以ID作为唯一标志,并以设备命名进行显示,供使用者直观查看在线电子浮标的设备信息及数量,以便选择需要的设备进行其他功能的操作。
2)基于卫星地图的设备实时位置与轨迹查看功能:在卫星地图上实时显示设备位置和运行轨迹,用户可以直观查看浮标所在水域,确定是否进入测流区间。
3)实时测流和数据传输状态显示功能:实时流速的测量自动完成,在页面上显示结果信息和数据传输状态信息。
4)测流区间选择功能:用户可以根据浮标实时位置,通过点击区间测流开始和结束指定测流区间,进行区间流速和流量的计算。
5)测流记录查询功能:测流数据用时间段标记并存储,可以根据时间进行查询。
6)测流历史回放功能:实时测流和区间测流操作数据被存储在云端,且区间测流的时间被以事件的形式进行存储,选择相应测流时间可以以视频的形式进行测流历史回放。
7)差分定位设置功能:为了提高数据的准确性,系统采用了差分定位,由用户根據实际情况进行选择,通过设置基准站坐标选择使用差分定位。
3.2 关键技术方案
电子浮标的低成本化的给定位精确度的保证带来了挑战;终端-云-上位机的架构影响了数据递交效率,使上位机的数据实时刷新效果不好;历史测流场景回放要求合理设计数据存储和数据查询请求形式。为了解决这些问题,提出如下技术方案:
3.2.1 低成本设备精确定位技术
为了应急监测的安全性,将浮标做成了消耗型产品,选择了低成本定位模块,性能有限。为了提高定位精度,我们在上位机利用差分技术对数据进行了处理[11-13],在有明确坐标的水文监测站放置节点作为基准站,移动节点利用该基准站数据进行差分计算,对误差进行修正,得到精确的经纬度来进行水流流速及流量的解算。步骤如下:
1)已知坐标的水文工作站安置基准站,采集定位信息(经、纬度、地面速度、地面航向、使用的卫星、星历),将结果发送至云平台。
2)在浮标节点上利用GPS模块采集定位信息,并传输至云平台。
3)上位机从云平台获取浮标节点和基准站的数据,进行差分计算:
由于自设基准站和移动节点距离通常不超过5 km,选择使用最简单的位置差分,可以消去基准站与用户站的共同误差,例如卫星轨道误差、SA影响、大气影响等。
已知基准站精准坐标(x0,y0,z0),基准站观测坐标为(x*,y*,z*),可由式(1)求得坐标修正数:
其中,(x1,y1)、(x2,y2)为浮标站在前一时刻t1和当前时刻t2的弧度坐标(弧度=经纬度×3.141 592 6/180),R=6 371.0 km,为地球半径。
5)在地图上显示浮标位置、速度,回到步骤2)。
3.2.2 基于事件驱动的数据实时刷新效果保障技术
为了获取实时数据,精确捕捉流速的实时变化情况,需要数据以较高频率进行采集,然而浮标节点能量受限,系统采用的终端-云平台-上位机的架构虽然具有很多优势,却存在响应速度门槛,无法实现高频率数据上报,为了实现实时性效果,采用了基于事件驱动的频率自适应数据上报机制:
1)下位机根据加速度的值确定数据采集频率并进行数据采集,将数据存入缓存。
2)设计三种驱动事件:间隔时间到达、加速度超阈值、缓存超限。间隔时间到达:按时间间隔进行数据上报;加速度超阈值:加速度超过阈值时说明速度变化较快,需要提高数据采集频率;缓存超限:缓存数据存满。
3)当事件发生时将缓存中的数据传输到云平台。
3.2.3 基于数据流的场景回放技术
历史回放功能动态展示了测流全过程,该功能并非视频记录,而是基于数据流的场景重现。测流数据以区间测流开始和结束的时间段进行了分段存储,软件按照时间节点从云平台请求历史数据,将节点运行轨迹、速度等信息按时间顺序在卫星地图上描绘。
3.3 系统运行结果
3.3.1 云平台数据接收
浮标节点和基准站将定位信息发送到云平台进行存储,云平台接收到的数据如图4所示。
3.3.2 上位机
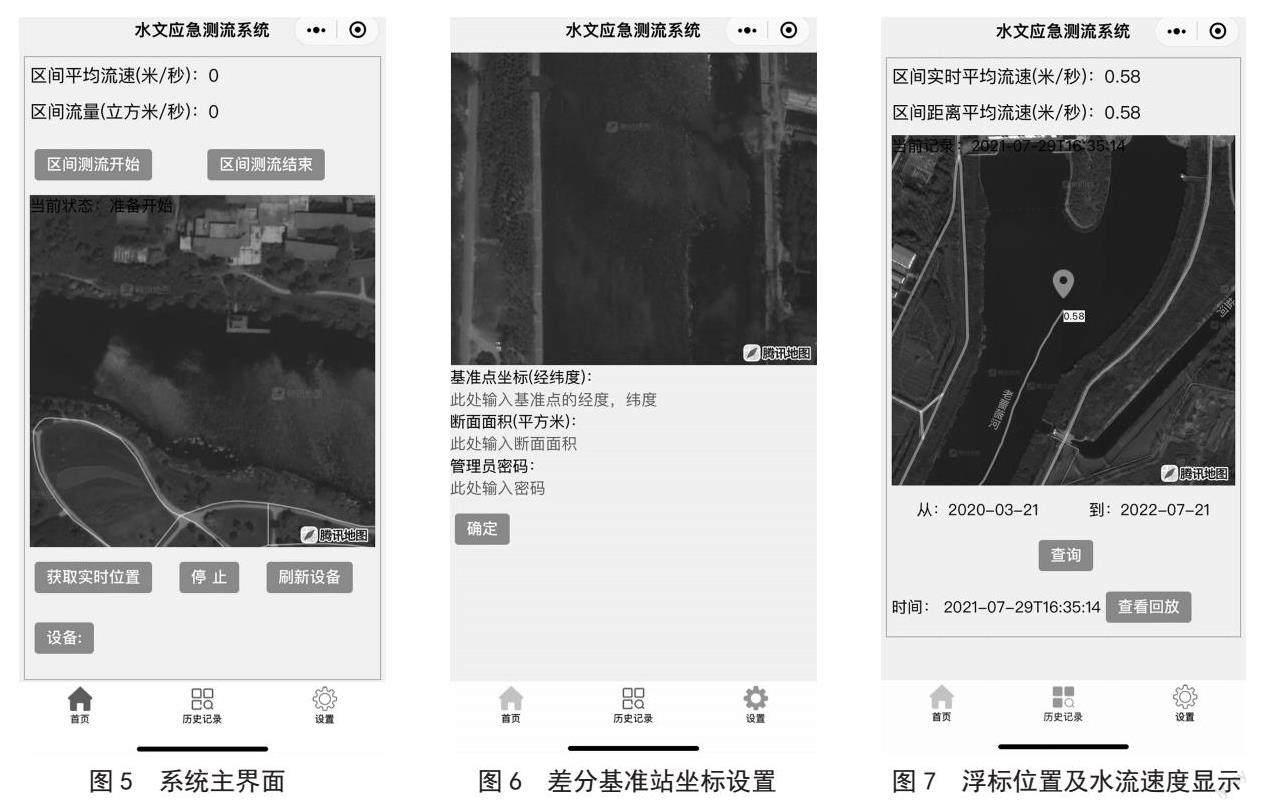
系统设计了测流操作主界面、历史记录界面和设置界面三部分,并在江苏省水文水资源勘测局连云港分局的配合下进行了测试。
图5为系统主界面,提供了测流过程实时展示和交互功能,用户可以点击“获取实时位置”和“停止”按钮开始和停止查看测流情况,界面同步显示当前测流状态;“区间测流开始”和“区间测流结束”按钮提供了用户交互功能,可以根据当前地图显示的浮标所在位置选择测流区间,该功能可以多次使用。用户可以通过设备按钮查看当前在线设备,并可以通过ID号选择要操控的设备。
图6为设置界面,可以设置用于差分定位的基准站坐标,当该坐标位设置时,系统不进行差分计算;可以通过设置断面面积用于计算流量,该值不被设置时主界面只显示平均流速。
图7为历史记录界面,测流数据以区间测流开始和结束的时间段进行了分段存储,用户可以按照时间进行查询,选择相应时间段进行历史测流过程的回放。
设置完成后,在系统主界面点击“获取实时位置”按钮,浮标实时位置和运行轨迹在地图上显示,通过“区间测流开始”和“区间测流结束”控制测流区间。
4 結 论
应急测流系统设计了结构简单、体积小、操作简单的GPS电子浮标,可以随取随用,大量布设,解决了设备成本高、覆盖率低,灾害中易损毁等问题,降低了应急监测人员的安全风险;采用GIS技术在卫星地图上实时显示浮标位置和速度信息,对测流过程进行直观展示,提供了更友好的数据可视化方式;选择监测区间的交互功能使工作人员能够获得多个区域的监测数据,使用更加灵活;差分定位技术、事件驱动的数据上报机制保障了系统性能,满足规范要求;历史数据的存储和回放功能为灾后进行事件分析、信息挖掘等提供数据支持。为水文应急监测提供了安全、便利、有效的技术手段。
参考文献:
[1] 孟宇华.加强水文应急监测建设探讨 [C]//2021(第九届)中国水利信息化技术论坛论文集.济南:[出版者不详],2021:376-381.
[2] 林薇.我国水文测流仪器发展概述 [J].水利技术监督,2004(2):60-62.
[3] 庄杰,经正彤.无人机监测系统在河流水文应急监测中的应用研究 [J].水利科学与寒区工程,2020,3(1):99-101.
[4] 刘力行.互联网技术在水文测流平台自动控制系统中的应用 [D].太原:太原理工大学,2021.
[5] 牛恩斌,陈柱.多功能智能测流航标的研制与应用 [J].中国海事,2020(3):50-54.
[6] 卢海文,武利生,王志文.GPS浮标追踪测流系统研究 [J].水文,2020,40(5):61-66.
[7] 孙振勇,金奇,戴剑.基于水文应急监测的GNSS测流系统平台设计与应用 [J].人民长江,2022,53(9):222-226.
[8] 姜凯,米智楠,王振峰,等.浮标平台对ADCP测流精度的影响分析 [J].海洋技术学报,2018,37(6):35-40.
[9] 张萍,胡应坤.基于OneNET物联网云平台构建视频应用 [J].物联网技术,2022,12(1):42-46.
[10] 李秋子.基于GPRS技术的水资源远程实时监测系统设计 [J].勘察科学技术,2021(5):7-11+20.
[11] 张小红,李星星,李盼.GNSS精密单点定位技术及应用进展 [J].测绘学报,2017,46(10):1399-1407.
[12] 周金龙,孙永荣,吴玲,等.GPS移动基准站差分定位算法 [J].导航与控制,2020,19(6):44-49+43.
[13] 杜歆,李宏东,顾伟康.一种提高差分GPS基准站定位精度的新方法 [J].浙江大学学报:理学版,2002(6):637-642+691.
作者简介:朱永红(1979—),女,汉族,江苏徐州人,副教授,博士,主要研究方向:物联网,人工智能。
猜你喜欢
水资源开发与管理(2023年8期)2023-09-08 13:27:10
河南水利年鉴(2020年0期)2020-06-09 05:43:48
河南水利年鉴(2020年0期)2020-06-09 05:43:30
河南水利年鉴(2017年0期)2017-05-19 02:29:33
中国科技博览(2016年15期)2016-08-23 00:45:09
科技与创新(2016年8期)2016-05-05 10:34:31
科技与创新(2015年3期)2015-03-31 04:08:36
中国建筑科学(2014年5期)2014-07-24 20:13:18
