
基于无人船测量系统的水下地形测量研究与应用
2023-06-20 09:47:46许成义孙栋张金营陈建忠孙如瑶沈孝永
山东国土资源 2023年2期
关键词:水库
许成义 孙栋 张金营 陈建忠 孙如瑶 沈孝永


摘要: 随着测深技术、GNSS技术、高精密传感器集成化的发展,无人船测量系统为水下地形测量提供了新的思路。结合山东省高密市王吴水库,探讨了无人船水下地形测量的作业流程,通过对比分析,选择最优测线间距获取数据,通过差值分析进行精度评价,数据处理后对成果进行展示。研究区结果表明,无人船测量系统基于单波束测深在中型水库中的应用是十分理想的,测深数据质量较好,能够很好地反映库区的水下地形情况,无人船测量系统在水下地形测量中起着重要作用。
关键词: 无人船测量系统;水下地形测量;水库;单波束测深;差值分析
中图分类号: P66 文献标识码: A doi:10.12128/j.issn.1672 6979.2023.02.007
引文格式: 许成义,孙栋,张金营,等.基于无人船测量系统的水下地形测量研究与应用[J].山东国土资源,2023,39(2):50 55.XU Chengyi, SUN Dong, ZHANG Jinying, et al. Study and Application of Underwater Topographic Survey Based on Unmanned Ship Survey System[J].Shandong Land and Resources,2023,39(2):50 55.
0 引言
传统水下地形测量是通过测深仪和GNSS接收机固定在船体上,航行到确定方位进行测深,测量中受到自然因素和人为作业的影响,导致作业量大、工作效率低、危险性高等。随着测绘科学技术水平的进步,人工智能技术、自动化技术的进步,水下测量集成化正在快速发展,其中GNSS RTK[1]和测深仪的组合是技术创新的重要窗口。无人船测量系统包含多种高精密传感器设备,如单波束测深仪[2]、多波束测深仪[3]、姿态传感器等,为水上环境纷繁复杂和高危险性等问题找到了答案,并实现自动化无人驾驶水上测绘,可以准确、快速获取水下地形数据。水下地形测量数据的获取相较于陆上测量数据有着局限性[4],大部分水域的水下数据现在仍为空白,无人船测量系统的快速发展与应用将会填补这个空白。
1 无人船测量系统
1.1 系统组成
无人船测量系统由船体、动力系统、通讯控制系统、定位系统、测深系统和岸边控制系统组成[5],可高效、准确地进行水下地形测量和数据获取,广泛应用于多种水域测量工作。无人船测量系统构成如下。
(1)船体。无人船船体采用高分子聚酯碳纤维材质,具有自重小、吃水浅、抗风浪、防水防尘防腐等特点,主要承载各种设备和传感器。
(2)通讯控制系统。能够有效链接无人船和岸边控制系统,实时传输无人船的工作状态和采集的数据。作业人员可以通过人工遥控和自动航行两种模式进行控制无人船航线。
(3)定位系统。通过GNSS接收机进行定位,可通过软件实时监控无人船的位置,查看无人船航行轨迹。
(4)测深系统。按照作业要求进行水深数据的采集,并通过软件进行水深数据的处理。
(5)岸边控制系统。由基准站、控制软件、通讯设备组成。基准站可自行架设,也可连接卫星定位连续运行综合应用服务系统(CORS);控制软件包括船体控制软件和数据采集处理软件;通讯设备为接收显示无人船的动态信息提供4G信号。
实验采用华微6号无人船,华微6号是一款大空间、多搭载、超轻便的全碳身自动无人船平台,标配单波束测深仪,标准搭载多波束测深系统,集成搭载iLiDAR三维激光扫描仪完成点云数据采集。具体无人船参数如表1所示。
1.2 测量系统基本原理
整个系统的导航定位采用GNSS RTK动态差分定位原理(图1)[6],通过架设基准站传输差分数据到无人船上的接收机,或直接连接省级卫星定位连续运行综合应用服务系统(CORS),实现实时定位和导航功能。水深测量由安置在船上的单波束测深仪完成,利用回声定位原理。假设船上的GNSS接收机的高程为 HG,测深仪测得换能器到水底面的水深为Hv ,测量时实际获得GNSS接收机至水面高度及水面至换能器底部高度分别为 Hg、Hd,那么在无人船航行时任意时刻位置的对应水底点的高程H 可通过式(1)计算得到:
H=HG-Hg-Hd-(Hv+△H1+△H2) (1)
式中: HG是接收机测得的高程,△H1是无人船的姿态改正,△H2 是声速改正。在实际航行作业过程中,受到自然因素的影响,无人船会产生横摇和纵摇[5],造成水深数据的位置与实际无人船的位置有误差,同时水深数据也存在误差,此项误差会随着水深的增加而增大,导致结果不准确。声速改正是水下测量误差的主要因素之一,水温、水质、浑浊度等都会影响声波在水中的传播速度,进而直接影响测深的精度。因此,使用姿态传感器对水深数据进行改正,确保了无人船测得的水深数据的可靠性[7],姿态改正由系统软件自动完成,每次作业前利用声速剖面仪进行声速测量,以反映测区实际的声速变化规律,测得声速值后由系统软件进行声速改正。
2 中型水库水下地形测量的应用
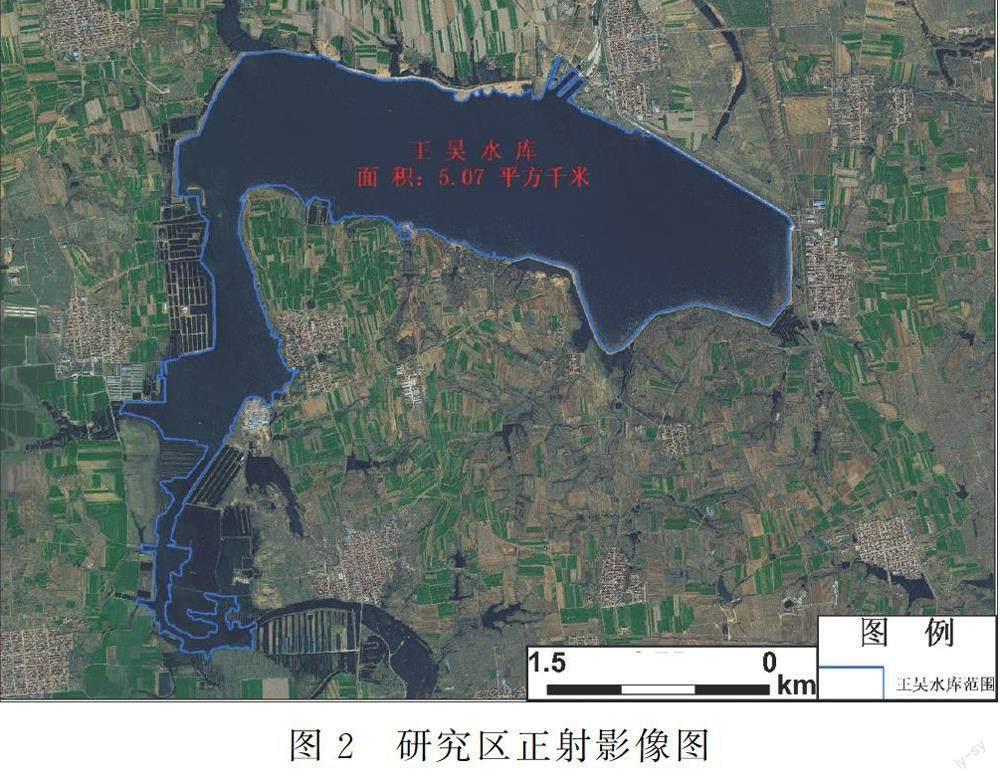
研究区为王吴水库,水库兴建于1958年,流域面积344km2,为国家2A级优质水源地,是一座以防洪为主,兼顾供水、灌溉等综合利用的中型水库。其水域面积约5.07km2,是中型水库中较大的(图2)。王吴水库的水下地形數据获取为山东省“十四五”基础测绘规划重点工程内容[8],采用华测华微6号无人测量船搭载D230测深仪,配套AutoPlanner、HydroSurvey软件[9]。
2.1 王吴水库无人船测深
王吴水库位于丘陵地区,周围无高山环绕,高差不大,导航定位选择CORS模式。无人船测量与作业流程见图3,正式测量前,利用华测E91RTK对近岸水域进行测量,将人工测深数据与无人船测量数据进行比对,通过10对位置重叠或位置相近的点比较,得出高程值差值在0.04~0.08m之间,说明无人船测深精度符合要求。
王吴水库北侧日常管理和维护较好,无垂钓、渔网等障碍,测量过程中除近岸浅水区域和个别死角需要人工控制测量,其余大部分水面用无人船自动航行。测线布设分别采用了垂直测线方向间距10m、20m和30m,平行测线方向间距1m,通过比对10m测线间距满足精度但是工作量大,30m的测线间距工作量小,但是精度不甚符合,20m的测线间距既符合精度工作量又小,所以最终采用了20m的测线间距。为采集数据丰富完整,充分利用无人船测深的优势,在记录控制设置中将采样方式设置为0.2s的采样间隔。王吴水库南侧水面深度较浅,水草、渔网较多,整体需要人工操控进行测量。整个水库确定范围内,北侧作业环境良好,每日完成测区任务约为0.7km2,南侧作业环境较差,需要多次寻找下船地点,为保障无人船安全,人工控制测量船速较慢约为1m/s,每日完成测区任务约为0.15km2。为保证水上水下数据无缝衔接,水库周边范围和无人船无法作业的区域需要人工利用RTK进行测量。通过无人船水下测量得到的数据约为63万个(图4)。
2.2 数据处理
完成外业数据采集完成后需要对水深数据进行初步处理。外业测量时,无人船航行测量过程中经过水下障碍物时,会导致测深仪测量的数据不正确,原始数据会有跳点的现象,点位明显不合理,要对失真的数据进行修正。按照规范要求测深数据要以测深模拟信号为依据,如果仅仅得到水深数据是不满足规范要求的,需要通过将测深模拟信号和水深数字数据进行叠加,判断水深数据的准确性[10 11]。通过信号和数据的叠加对部分失真数据进行修正后,软件会根据设置距离进行自动取样,生成htt文件,最后将htt文件合并导出csv格式文件进行内业编辑处理。
2.3 精度检测
精度检测是质量控制的一个重要过程。本文研究区采用“等精度观测”的方式进行精度检测[12],在测区布设一定数量的检测线,检测线与主测线相垂直,检测线的定位点保证与主测线的测深点有重合(图上1mm范围)。等精度水深测量完成后,对主测线和检测线的数据分别进行预处理,要求检查线与主测线的所有规定范围内的交点都进行比较,对无法比较的离散测点,要根据绘制的水下等高线进行图解[13],通过差异进行对比分析,是否在误差精度允许的范围内。
本次实验水下地形测量检测线共采集约3万个点,其中交汇重合点1114个,通过对主测线与检测线交汇点数据进行统计分析[10],计算标准差。从统计结果可知,交汇点最大差值0.30m,最小差值为0m(图5),主测线与检测线之间的数据偏差小于0.1m的占74.13%,小于0.2m的占95%,小于0.30m达到100%(图6),其标准差为0.09m,远小于标准限差0.4m。由于交汇点数据量较大,只列举20对交汇点数据(表2)。
2.4 无人船水下测量成果
内业处理中,应用EPS软件或者ArcGis软件生成水下等高线,通过编辑、修改、圆滑等工序完成水下地形图绘制和相关测绘成果的制作[14 18],并从细部展现无人船水下测量成果(图7)。
3 结论
本文通过无人船测量系统基于单波束测深仪对高密市王吴水库进行水下地形测量,测量数据能真实有效的呈现水库的水下地形情况。根据本次实际测量成果,无人船测量系统具有以下优势:
(1)无人船可以实现作业无人化,自主航行、自动避障等,避免了作业人员在船只上作业,规避了涉水安全隐患[16]。
(2)集成化程度高,导航定位装置和测深仪于一体,解决了设备繁多,连接复杂的问题,让作业更加轻松、高效;机动性强,可以测量一些特殊的区域,像浅水区、狭窄水域等[14]。
(3)降低了作业成本,无人船船体小,携带方便,减少了租用船只、设备维护、人员使用等方面的费用。
无人船测量作为一种新技术,目前处于推广阶段,在使用过程中也出现了一些问题[17]。无人船的操控范围需进一步提升,遥控器的控制距离大概在800 m左右,在山丘地形、水库岸边参差不平等环境因素阻断信号后,控制距离会进一步缩小;无人船动力系统马达保护措施需要改进,马达若是被缠绕住,在水中停滞,需要作业人员进入水中处理,增加风险,在水草多的区域,马达会受到阻塞,航行测量效率严重受到影响;无人船电池续航能力需要提高,在中型水库测量中,电量基本能够满足要求,若是对大型水库或者湖泊进行作业,则很难满足需求。随着技术的不断改进和更新,无人船测量系统将在水下地形测量中发挥更大作用[18]。
参考文献:
[1] 丁仕军,张书华,徐杰,等.Kalman滤波在GPS/BDS组合伪距差分定位中的应用[J].山东国土资源,2017,33(10):78 82.
[2] 牛冲.不同窗口下中值滤波与加权滤波方法效果分析[J].测绘科学,2021,46(8):21 27.
[3] 刘经南,赵建虎.多波束测深系统的现状和发展趋势[J].海洋测绘,2002(5):3 6.
[4] 牛冲.基于CORS RTK无验潮的海岸带水下地形测量精度分析[J].海洋测绘,2021,41(6):36 39.
[5] 雷添杰,张鹏鹏,胡连兴,等.無人船遥感系统及其应用[J].测绘通报,2021(2):82 86,92.
[6] 李维平,方忠旺.基于水域机器人的水下地形测量系统研究与应用[J].北京测绘,2019,33(9):1098 1101.
[7] 史富贵.水下地形测量成果质量检验若干问题探讨[J].测绘科学,2015,40(7):109 112.
[8] 凌晓春.新型基础测绘思考与实践:以山东省为例[J].山东国土资源,2020,36(3):74 78.
[9] 袁建飞.无人测量船在水下地形测量中的应用研究[J].北京测绘,2017(4):69 72.
[10] 叶昆平.水下地形测量精度评定的方法研究[J].地理空间信息,2020,18(8):73 75,93.
[11] 赵建虎,欧阳永忠,王爱学.海底地形测量技术现状及发展趋势[J].测绘学报,2017,46(10):1786 1794.
[12] 文海量,刘志军.浅谈无人船测量系统在水库地形测量中的应用[J].内蒙古水利,2021(9):71 74.
[13] 陈俊任,周晓华.无人船测量系统在水下地形测量中的应用[J].测绘技术装备,2020,22(1):65 68.
[14] 梁昭阳.无人船测量系统在水库地形测量中的应用[J].城市勘测,2018(1):132 135.
[15] 李传,章繁荣,邓红勇.HY1621多波束测深仪的性能分析[J].海洋测绘,2020,40(1):73 78.
[16] 商建伟.基于GNSS的單波束测深系统在大中型水库水下地形测量中的应用[J].山东国土资源,2022,83(1):65 69.
[17] 罗旭,石明旺.无人船测量系统在河道水下地形测量中的应用[J].城市勘测,2020(4):164 167.
[18] 高艳.无人船在水下地形测量中的应用与探讨[J].城市勘测,2019(4):173 175,179.
Study and Application of Underwater Topographic Survey Based on Unmanned Ship Survey System
XU Chengyi, SUN Dong, ZHANG Jinying, CHEN Jianzhong, SUN Ruyao, SHEN Xiaoyong
(Shandong Provincial Institute of Land Surveying and Mapping, Shandong Ji'nan 250013, China)
Abstract: Accompanying with the development of sounding technology, GNSS technology and high precision sensor integration, unmanned ship survey system provides new ideas for underwater topographic survey. Combining with Wangwu reservoir in Gaomi city in Shandong province, unmanned ship underwater topographic survey process has been studied. Through comparison and analysis, selecting the optimal survey line spacing to obtain data, evaluate the accuracy through difference analysis, and display the results after data processing. It is showed that the application of the unmanned vessel survey system based on single beam bathymetry in medium sized reservoirs is very ideal, the quality of bathymetric data is good. It can well reflect the underwater topography of the reservoir area. The unmanned vessel survey system plays an important role in underwater topographic survey.
Key words: Unmanned ship survey system; underwater topographic survey; reservoir; single beam sounding; difference analysis
猜你喜欢
中国三峡(2022年6期)2022-11-30 06:14:46
建材发展导向(2021年10期)2021-07-16 07:13:48
河南水利年鉴(2020年0期)2020-06-09 05:43:58
河南水利年鉴(2020年0期)2020-06-09 05:43:56
河南水利年鉴(2020年0期)2020-06-09 05:43:56
河南水利年鉴(2020年0期)2020-06-09 05:43:56
河南水利年鉴(2020年0期)2020-06-09 05:43:56
河南水利年鉴(2020年0期)2020-06-09 05:43:52
河南水利年鉴(2020年0期)2020-06-09 05:43:52
河南水利年鉴(2020年0期)2020-06-09 05:43:52
