
基于改进蚁群算法的蔬菜大田无人农机路径优化
2023-06-15 02:38:42王海琛吴华瑞朱华吉缪祎晟杨宝祝
中国农机化学报 2023年4期
关键词:蚁群算法
王海琛 吴华瑞 朱华吉 缪祎晟 杨宝祝
摘要:推進蔬菜机械化与无人化种植能够保障优良的蔬菜规模化种植技术效益,有力保证蔬菜质量与品质,有利于蔬菜规模化生产种植技术产业体系的发展。利用无人拖拉机作业GPS定位点集将实际农业作业区域转化为规则矩形,在此基础上建立以无人拖拉机总转弯距离最短为优化模型,采用蚁群算法对无人拖拉机耕地作业路径序列进行搜索。同时考虑到传统蚁群算法易陷入局部最优、全局搜索能力不足等问题,提出一种基于和声搜索策略的改进蚁群算法,通过引入sigmoid函数与和声搜索机制改善路径搜索能力,得到高质量耕地作业路径序列。将传统蚁群算法(AC)、精英蚁群算法(ELAC)作为对比算法,将传统梭形、回形作业方法作为路径对比作业方法,针对不同耕地作业规模进行无人拖拉机作业路径搜索试验。结果表明,本文算法得到的总转弯距离较梭形耕法降低35.53%~43.08%、较回形耕法降低24.98%~86.88%。精英蚁群算法在小规模作业区域中性能较优,但随着蔬菜大田规模扩大,改进和声蚁群算法优化效果更明显。
关键词:路径寻优;无人农机;排序优化;蚁群算法
中图分类号:S24
文献标识码:A
文章编号:2095-5553 (2023) 04-0187-08
Abstract: Promoting vegetable mechanization and unmanned planting can guarantee the benefits of high-quality vegetable large-scale planting technology, and effectively guarantee the quality and quality of vegetables, which is conducive to the development of the industrial system of vegetable large-scale production planting technology. This paper uses the GPS positioning point set for unmanned tractor operation to transform the actual agricultural operation area into a regular rectangle. On this basis, an optimization model with the shortest total turning distance of the unmanned tractor is established, and the ant colony algorithm is used to search the path sequence of unmanned tractor cultivated land. At the same time, considering that the traditional ant colony algorithm is easy to fall into the local optimum and the global search ability is insufficient, an improved ant colony algorithm based on the harmony search strategy is proposed. The sigmoid function and the harmony search mechanism are introduced to improve the path search ability and obtain high sequence of quality farmland working paths. In this paper, the traditional ant colony algorithm (AC), the elite ant colony algorithm (ELAC) and the shuttle and back operation methods are used as comparison algorithms, and the operation path search experiment of unmanned tractors is carried out for different farmland operation scales. The test results show that the total turning distance obtained by the algorithm in this paper is reduced by 35.53%-43.08% compared with the shuttle tillage method, and reduced by 24.98%-86.88% compared with the return tillage method. The elite ant colony algorithm has better performance in small-scale operation areas, but as the scale of vegetable fields expands, the optimization effect of the improved harmony ant colony algorithm is more obvious.
Keywords: path optimization; unmanned agricultural machinery; ranking optimization; ant colony algorithm
0 引言
当前国内针对无人拖拉机作业研究大多聚焦于粮食作物领域,罗锡文院士团队与雷沃重工在小麦种植方面实现全程无人化深耕、播种作业[1]。北大荒农垦集团针对平原地区集中大面积水稻完成全过程无人作业试验。内蒙古、山东、新疆等地开展玉米、棉花等粮食经济作物的田间播种、收割等无人农机全过程无人作业试验,探索农艺与无人农机融合经验[2]。由于蔬菜种植生产过程复杂,有着更高的农艺要求,蔬菜产业领域的无人化作业起步较晚,发展程度较低。
蔬菜种植对土壤质量要求较高,为了创造蔬菜良好的生长环境,提高蔬菜的品质与产量,土壤翻耕是蔬菜种植中的一项关键工作[3]。当前蔬菜种植生产过程中大多采用传统拖拉机翻耕作业方式,随着我国蔬菜种植规模逐年扩大,生产种植过程中用工多、成本高、重复作业率高、作业效率低等问题正制约蔬菜产业体系的进一步发展[4]。在农村老龄化和蔬菜种植效率较低的情况下,需要加快研究和推广种植全程无人机械化生产模式。合理的无人拖拉机耕地作业路径规划是影响无人拖拉机耕地作业效率的重要因素,无意义的重复作业路径与无序的路径规划,不仅降低了无人拖拉机的耕地作业效率,同时加大了无人拖拉机的机械损耗[5-6]。为了提高蔬菜种植过程的效率,降低蔬菜种植成本[7-8],建立无人拖拉机作业模型并优化无人拖拉机耕地作业路径是精准农业领域的研究热点。
Driscoll[9]提出一种求解规则矩形区域的方法,使农机作业路径达到完全覆盖的效果,该算法没有考虑最佳作业起始方向与路径,无法得到最优作业路径。Hameed等[10]提出一种边到边的田地区域模型确定方法,有效减少区域模型建立时的重叠与遗漏问题。孟志军等[11]则以转弯次数少、作业消耗最小和有效作业路径比最大为目标函数,采用划分田间区域的方式进行拖拉机作业路径规划。Plessen[12]采用AB、CIRC(circular pattern)和CIRC*三种改进套耕模式可以改善规则矩形区域的农机作业路径,但由于该模型在传统套耕作业方式进行改进,重复路径的减少效果有限。Rahman等[13]利用凸包算法构造农田实际作业区域模型,通过传统路径规划对收割机的作业路线进行简单规划。
在以上研究中,大多在建立作业区域模型的基础上通过传统作业方式进行无人拖拉机的路径规划。Bochtis等[14]提出了一种计算拖拉机遍历序列的算法,将加权图的遍历来表示拖拉机覆盖农田的作业问题。由此拖拉机的最优作业路径规划问题等价于在图中寻找最优遍历序列的TSP问题。黄小毛等[15]改进了传统农机的转弯模型,并采用贪心算法求解拖拉机最优作业路径序列,但该算法无法得到最短总转弯距离。Utamima等[16]通过融合邻域搜索和精英原理,提出一种新的分布估计算法,从大面积农田与多农机协同方面对拖拉机作业路径进行优化。姚竟发等[17]采用多普勒与贪心策略改进传统模拟退火算法,基于不同形状的农田、不同的农机等方面对农机作业路径进行优化。Seyyedhasani等[18]根据传统割草作业路线,提出一种基于禁忌搜索的优化模型对传统割草作业路线重新进行选择优化,该模型有效提升割草机作业效率,但该方法仍然存在重复作业路线。
上述研究通常将拖拉机作业地块建立为理想作业区域模型,采用传统作业路径或简单路径规划方法进行土地翻耕作业,限制了无人拖拉机在农业领域的实际应用,降低了作业效率。针对上述问题,本文基于增量凸包算法理论建立了实际蔬菜大田的最优工作区域模型,通过蚁群算法解决无人拖拉机进行耕地作业时路径的大规模路径序列组合优化问题[19-20],同时针对传统蚁群算法存在的全局搜索作业路径难度大,寻找路径时容易陷入局部最优等问题[21-23],提出一种基于和声搜索的改进蚁群算法(Harmongy Search Ant Colony Algorithm,HSAC),利用sigmoid函数特性动态调整传统蚁群算法信息素挥发因子,同时引入和声搜索算法对信息素因子与启发因子在算法迭代过程中进行最适应选择,从而提升算法迭代效率与路径寻优能力。
1 作业区域建模
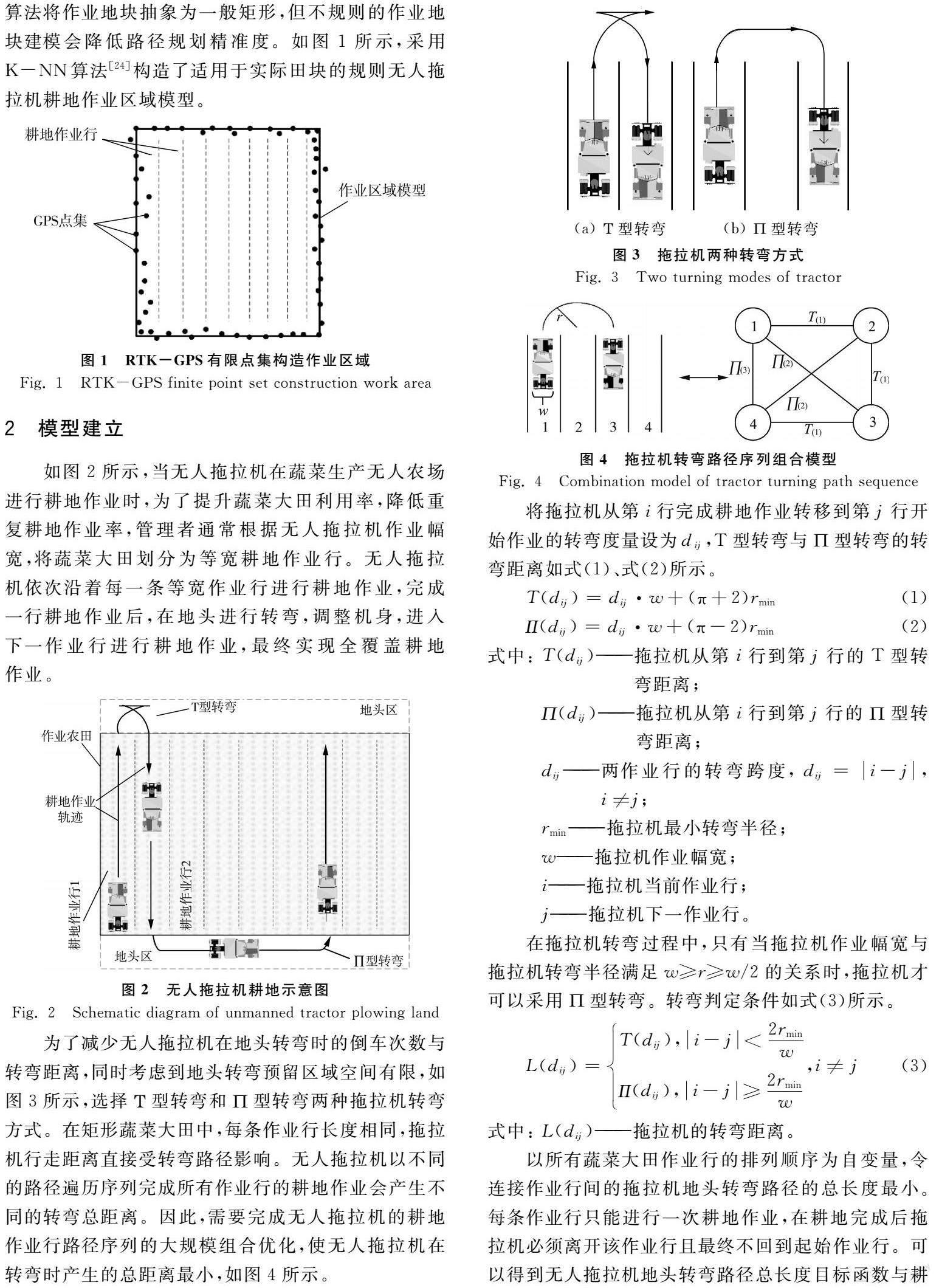
本文通过无人拖拉机RTK-GPS(实时全球定位系统)得到作业地块的有限位置点集,并利用增量凸包算法将作业地块抽象为一般矩形,但不规则的作业地块建模会降低路径规划精准度。如图1所示,采用K-NN算法[24]构造了适用于实际田块的规则无人拖拉机耕地作业区域模型。
2 模型建立
如图2所示,当无人拖拉机在蔬菜生产无人农场进行耕地作业时,为了提升蔬菜大田利用率,降低重复耕地作业率,管理者通常根据无人拖拉机作业幅宽,将蔬菜大田划分为等宽耕地作业行。无人拖拉机依次沿着每一条等宽作业行进行耕地作业,完成一行耕地作业后,在地头进行转弯,调整机身,进入下一作业行进行耕地作业,最终实现全覆盖耕地作业。
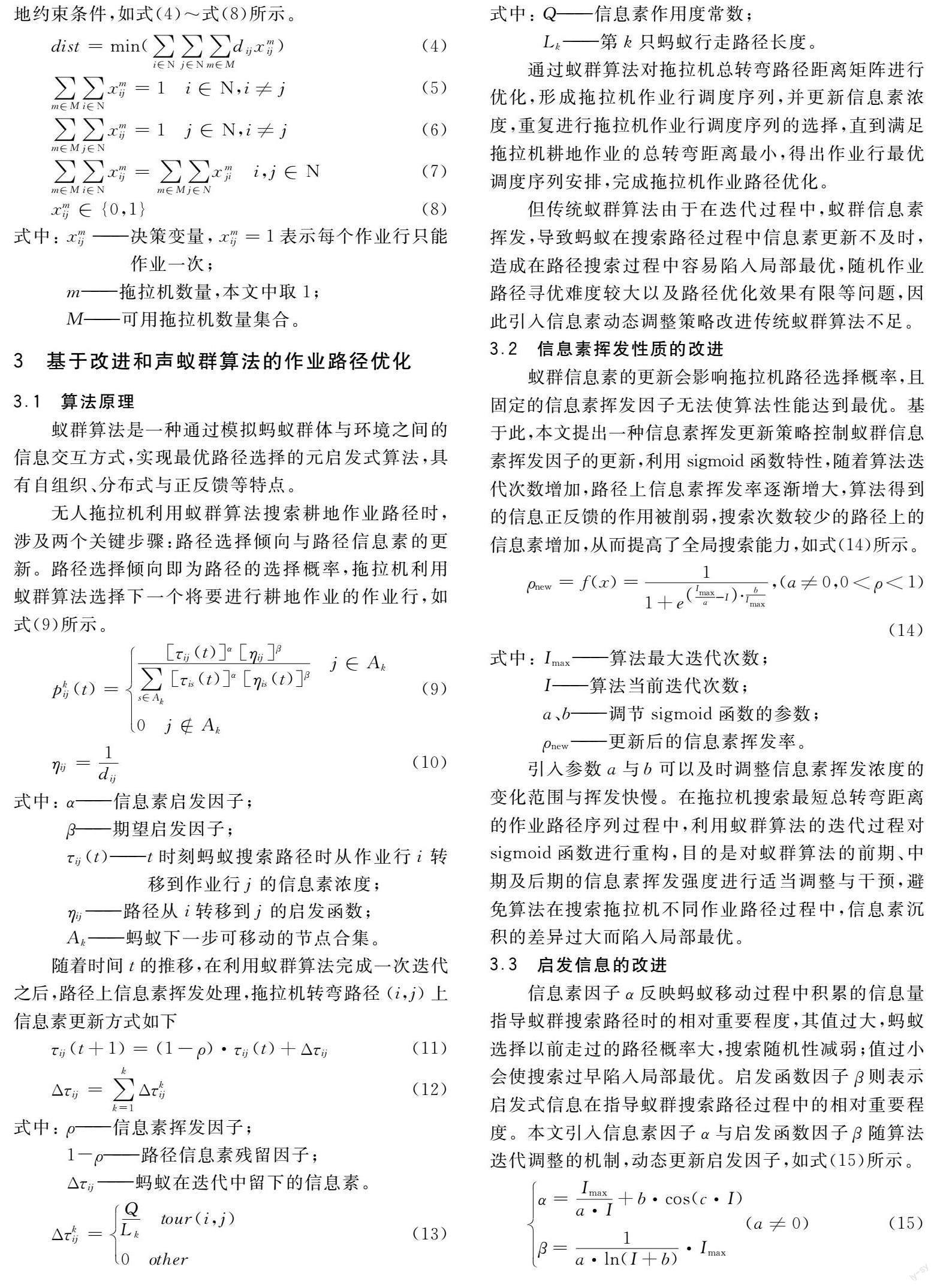
为了减少无人拖拉机在地头转弯时的倒车次数与转弯距离,同时考虑到地頭转弯预留区域空间有限,如图3所示,选择Τ型转弯和П型转弯两种拖拉机转弯方式。在矩形蔬菜大田中,每条作业行长度相同,拖拉机行走距离直接受转弯路径影响。无人拖拉机以不同的路径遍历序列完成所有作业行的耕地作业会产生不同的转弯总距离。因此,需要完成无人拖拉机的耕地作业行路径序列的大规模组合优化,使无人拖拉机在转弯时产生的总距离最小,如图4所示。
由于和声搜索算法通过模仿即兴演奏者的活动来发挥作用,经常为复杂函数找到最优的输入集[25]。和声搜索算法时间复杂度小,根据和声搜索算法的搜索机制,通过个体的扰动策略每次迭代时都可以得到一个新的解向量,从而可以增加和声组合的多样性[26]。为了提高蚁群信息素因子和启发函数因子组合的多样性,利用和声搜索算法每次产生的新解对和声记忆库中的组合不断更新与替换的特性,以无人拖拉机耕地作业路径总转弯距离达到最短作为目标函数,确定由信息素因子与启发函数因子组成的最优解向量。
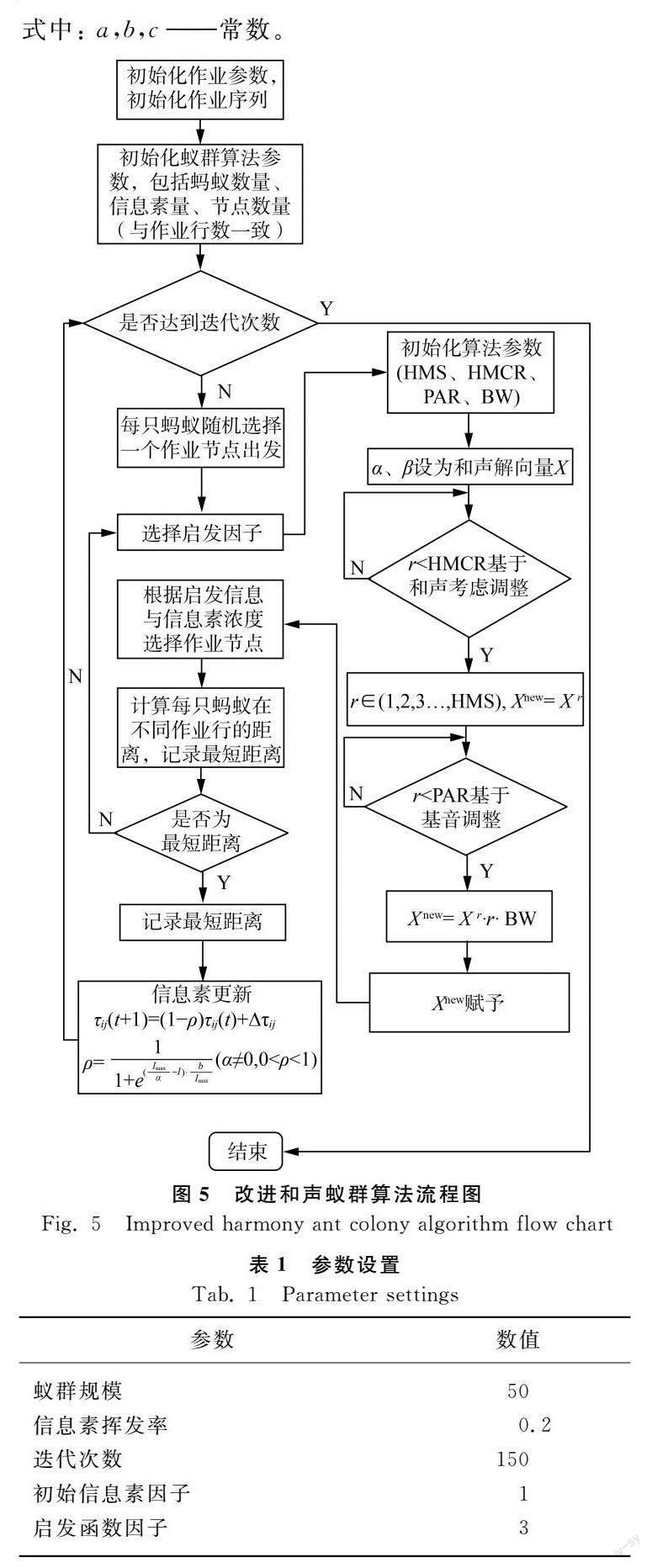
改进和声蚁群算法流程如图5所示。
改进和声蚁群算法具体步骤如下。
1) 初始化算法主要参数:和声记忆库大小(HMS)、和声记忆保留概率(HMCR)、音高调整率(PAR)、调整步长(BW)以及最大循环次数。
2) 选择无人拖拉机耕地作业时总转弯距离作为求解的目标函数F(x)。
3) 构建和声记忆库。通过迭代关系式(15)求出每次迭代时的启发式因子和信息素因子,并组合为目标函数F(x)的解向量X(x1、x2、x3…xImax)。
4) 更新和声记忆库。根据生成的新解向量,利用基于HMCR考虑、基于PAR结合步长BW调整的基音考虑两种操作方式,从HM中即兴创作出新的和声向量。并与解得的和声向量进行比较。如果产生的和声比HM中最差的和声好,更新和声向量Xi。
5) 将和声搜索每次迭代得到的解更新蚁群算法中信息素因子α、启发因子β。
4 试验与分析
4.1 试验环境
为验证算法性能与无人拖拉机作业路径优化效果,本文分别采用传统蚁群算法、精英蚁群算法与改进和声蚁群算法进行作业路径优化对比试验。试验采用版本为3.7的Python语言编写,在Windows10 64位操作系统、处理器为Intel(R)Core(TM)ig-9300H的环境下进行仿真。
4.2 矩形蔬菜大田下拖拉机路径优化结果分析
在田间无人拖拉机耕地作业优化路径试验中,蔬菜大田大小不同,规划出的耕地作业行数目也不同,无人拖拉机在搜索路径的难度随着作业行数的增多而增大。为研究在不同规模蔬菜大田的耕地作业行下,本文算法的无人拖拉机作业路径优化效果及其规律,选择了当前农业生产中常见的约翰迪尔6B1204型号无人拖拉机参数作为试验参数,无人拖拉机作业宽幅为2.5 m,最小转弯半径为5 m。作业场景为8行、12行、22行、30行、54行和90行的6种规模蔬菜大田。本试验所有算法均采用如表1所示的相同参数。
在当前农业生产环境下,无人拖拉机作业路径选择方式仍然采用传统拖拉机耕地作业方式中的梭形耕法与回形耕法,如图6所示。从图6中可以看出,当拖拉机选择梭形耕法作业时,每结束一行作业均需要在地头进行倒车操作进入下一行作业,降低了拖拉机作业效率,增加了拖拉机的机械损耗。
而拖拉机采用回形耕法作业时,虽然不存在倒车操作的问题,却增加了拖拉机转弯的距离,加大了拖拉机能源消耗,同样降低了拖拉机耕地作业效率。其试验仿真结果如表2所示,采用改进和声蚁群算法对拖拉机作业路径序列进行优化后,无人拖拉机耕地作业转弯路径显著缩短,对比传统梭形耕法与回形耕法,改进和声蚁群算法优化路径后的路径缩短效果分别达到35.53%~43.08%和24.98%~86.88%。
图7为传统蚁群算法(AC)、精英蚁群算法(ELAC)和改进和声蚁群算法在12行、54行、90行三类作业田地中的作业寻优效率。
从图7中可以发现,传统蚁群算法迭代次数多,收敛速度较慢,精英蚁群算法迭代次数有显著减少。由于本文算法通过调整信息素挥发策略,避免了拖拉机搜索作业路径时在正反馈的作用下向局部解收敛,提高了算法的收敛速度。
从图7(c)可以发现,改进和声蚁群算法改进了搜索路径时的启发机制,在蔬菜大田规模较大时仍可以保持较高算法效率,算法在迭代100次前即可完成收敛。
表3为三种算法在不同规模农田下的作业寻路时间。
从表3中可以发现,相对传统蚁群算法与本文提出的改进蚁群算法,精英蚁群算法的寻路时间最短。在较大面积农田下,使用精英蚁群算法优势更为明显,而本文所提出的改进蚁群算法,在算法迭代过程中,使用了和声搜索策略寻找蚁群算法的启发因子,导致算法在寻路过程中增加了计算时间,由于本文算法应用场景为离线式路径搜索系统,即非实时搜索作业优化路径,同时在大部分作业场景中仍然可以以较快速度寻找最优路径,因此本文提出的改进蚁群算法仍然具有实际应用效果。
传统蚁群算法、精英蚁群算法与改进和声蚁群算法对拖拉机耕地作业田地进行路径优化,对比结果如表4所示。从表4中可以发现,传统蚁群算法存在易陷入局部最优的不足,路径寻优能力较弱。精英蚁群算法与改进和声蚁群算法对比传统蚁群算法均能找到更优的拖拉机作业路径。随着蔬菜大田规模增大,作业行数增多,改进和声蚁群算法动态调整了信息素挥发策略,通过优化路径搜索启发机制提高了搜索路径能力。蔬菜大田规模增大时,改进和声蚁群算法较精英蚁群算法的路径寻优效果有进一步提升。
无人拖拉机在12行耕地作业行条件下,由传统蚁群算法、精英蚁群算法与改进和声蚁群算法所得出的路径规划示意图,如图8所示。
图8中,圆形符号表示路线的起点,而菱形符号表示路线的终点。从图8可看出,通过智能优化算法对无人拖拉机耕地作業路径进行优化后,对比传统梭形耕法,倒车操作的次数大大减少,Τ型与Π型转弯方式的结合使用可以使拖拉机作业路径达到最短。改进和声蚁群算法的路线中(图8(c))由于没有Τ型转弯倒车操作的情况,所用作业实际时间比精英蚁群算法更短,更有助于无人拖拉机的维护与保养。
5 结论
1) 本文利用蚁群算法对矩形蔬菜大田下无人拖拉机耕地作业路径的调度序列进行优化,使无人拖拉机在作业中的总转弯距离达到最短,同时针对传统蚁群算法易陷入局部最优的问题研究了基于sigmoid函数特性的蚁群算法信息素挥发动态调整的方法。同时,考虑到传统蚁群全局搜索能力较弱,本研究利用和声搜索算法确定蚁群算法信息素因子与启发因子的最优参数组合。
2) 与传统蚁群算法、精英蚁群算法相比,本文所提出的改进和声蚁群算法,在不同规模的矩形蔬菜大田场景下,迭代次数有显著减少,搜索作业路径效率较优,算法性能得到较好提升。
3) 与传统耕地作业方式相比,改进和声蚁群算法比梭形耕法的总转弯距离降低了35.53%~43.08%,比回形耕法的总转弯距离降低了24.98%~86.88%,有效降低无人拖拉机实际作业过程中的作业时长,减少了无人拖拉机作业成本与机械损耗。
参 考 文 献
[1] 农机君. 雷沃无人农场: 智慧农机守护“大国粮仓”[J]. 农业机械(上半月), 2021(1): 61-62.
[2] 马国建, 陈梦佳, 许梦凡. 基于无人农业系统试验的智能农机补贴政策研究[J]. 新疆农机化, 2021(3): 36-39.
Ma Guojian, Chen Mengjia, Xu Mengfan. Research on intelligent agricultural machinery subsidy policy based on unmanned agricultural system experiment [J]. Xinjiang Agricultural Mechanization, 2021(3): 36-39.
[3] 李娟, 秦東梅. 蔬菜种植应提前做好土壤翻耕与整理[J]. 农村百事通, 2021(5): 192.
[4] 郑平平, 汤玮, 宋伟杰, 等. 无人驾驶拖拉机路径跟踪联合控制研究[J]. 农业装备与车辆工程, 2021, 59(2): 79-82.
Zheng Pingping, Tang Wei, Song Weijie, et al. Research on path tracking joint control of driverless tractor [J]. Agricultural Equipment & Vehicle Engineering, 2021, 59(2): 79-82.
[5] 韩树丰, 何勇, 方慧. 农机自动导航及无人驾驶车辆的发展综述[J]. 浙江大学学报(农业与生命科学版), 2018, 44(4): 381-391.
Han Shufeng, He Yong, Fang Hui. Recent development in automatic guidance and autonomous vehicle for agriculture: A review [J]. Journal of Zhejiang University (Agriculture and Life Sciences Edition), 2018, 44 (4): 381-391.
[6] 刘成良, 林洪振, 李彦明, 等. 农业装备智能控制技术研究现状与发展趋势分析[J]. 农业机械学报, 2020, 51(1): 1-18.
Liu Chengliang, Lin Hongzhen, Li Yanming, et al. Analysis on status and development trend of intelligent control technology for agricultural equipment [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(1): 1-18.
[7] 李玉林. 大田作物机械化收运系统精益运作及关键问题研究[D]. 重庆: 重庆大学, 2015.
Li Yulin. Research on lean operation and key issues of mechanized crop harvesting-to-transport system [D]. Chongqing: Chongqing University, 2015.
[8] Santos L C, Santos F N, Pires E J S, et al. Path planning for ground robots in agriculture: a short review [C]. 2020 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC). IEEE, 2020: 61-66.
[9] Driscoll T M. Complete coverage path planning in an agricultural environment [J]. Digital Repository, 2011.
[10] Hameed I A, Cour-Harbo A L, Osen O L. Side-to-side 3D coverage path planning approach for agricultural robots to minimize skip/overlap areas between swaths [J]. Robotics and Autonomous Systems, 2016, 76: 36-45.
[11] 孟志军, 刘卉, 王华, 等. 农田作业机械路径优化方法[J]. 农业机械学报, 2012, 43(6): 147-152.
Meng Zhijun, Liu Hui, Wang Hua, et al. Optimal path planning for agricultural machinery [J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(6): 147-152.
[12] Plessen M M G. Partial field coverage based on two path planning patterns [J]. Biosystems Engineering, 2017, 171(121-32).
[13] Rahman M M, Ishii K, Noguchi N. Optimum harvesting area of convex and concave polygon field for path planning of robot combine harvester [J]. Intelligent Service Robotics, 2019, 12(2): 167-179.
[14]
Bochtis D D, Vougioukas S G, Griepentrog H W. A mission planner for an autonomous tractor [J]. Transactions of the ASABE, 2009, 52(5): 1429-1440.
[15] 黄小毛, 付正坤, 丁幼春, 等. 矩形边界条件下农机作业方向平行路径的排序优化[J]. 华中农业大学学报, 2014, 33(4): 130-136.
Huang Xiaomao, Fu Zhengkun, Ding Youchun, et al. Sequence optimization of direction parallel path for the agricultural vehicles in field of rectangle boundary [J]. Journal of Huazhong Agricultural University, 2014, 33(4): 130-136.
[16] Utamima A, Reiners T, Ansaripoor A H. Evolutionary estimation of distribution algorithm for agricultural routing planning in field logistics [J]. Procedia Computer Science, 2019, 161: 560-567.
[17] 姚竟發, 刘静, 张璠, 等. 基于多普勒与贪心策略的农机作业路径优化研究[J]. 中国农机化学报, 2020, 41(4): 130-137.
Yao Jingfa, Liu Jing, Zhang Fan, et al. Optimization of agricultural machinery operation path based on Doppler and greedy strategy [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(4): 130-137.
[18] Seyyedhasani H, Dvorak J S. Reducing field work time using fleet routing optimization [J]. Biosystems Engineering, 2018, 169: 1-10.
[19] 张松灿, 普杰信, 司彦娜, 等. 蚁群算法在移动机器人路径规划中的应用综述[J]. 计算机工程与应用, 2020, 56(8): 10-19.
Zhang Songcan, Pu Jiexin, Si Yanna, et al. Survey on application of ant colony algorithm in path planning of mobile robot [J]. Computer Engineering and Applications, 2020, 56(8): 10-19.
[20] 柳丹, 郭忠, 张树丽. 基于无人机航路规划问题的蚁群算法综述[J]. 汽车实用技术, 2018(1): 111-113.
Liu Dan, Guo Zhong, Zhang Shuli. The review of ant colony algorithm based on UAV route planning [J]. Automobile Applied Technology, 2018(1): 111-113.
[21] 毛嘉琪. 改进蚁群算法的机器人路径规划研究[J]. 计算机应用与软件, 2021, 38(5): 300-306.
Mao Jiaqi. Robot path planning based on improved ant colony algorithm [J]. Computer Applications and Software, 2021, 38(5): 300-306.
[22] 陈余庆, 李桐训, 于双, 等. 基于势场蚁群算法的机器人全局路径规划[J]. 大连理工大学学报, 2019, 59(3): 316-322.
Chen Yuqing, Li Tongxun, Yu Shuang, et al. Global path planning of robots based on potential field ant colony algorithm [J]. Journal of Dalian University of Technology, 2019, 59(3): 316-322.
[23] 何亚辉. 基于改进蚁群算法的物流配送路径规划算法[J]. 计算机与数字工程, 2021, 49(5): 920-924.
He Yahui. Logistics distribution route planning based on improved ant colony algorithm [J]. Computer and Digital Engineering, 2021, 49(5): 920-924.
[24] Waleed M, Um T W, Kamal T, et al. Determining the precise work area of agriculture machinery using internet of things and artificial intelligence [J]. Applied Sciences, 2020, 10(10): 3365.
[25] Zhang T, Geem Z W. Review of harmony search with respect to algorithm structure [J]. Swarm and Evolutionary Computation, 2019, 48: 31-43.
[26] 吴莹, 欧云, 姚玄石, 等. 基于改进和声算法的TSP路径求解[J]. 吉首大学学报(自然科学版), 2021, 42(1): 35-40.
Wu Ying, Ou Yun, Yao Xuanshi, et al. Solving TSP issue based on improved harmony algorithm [J]. Journal of Jishou University (Natural Sciences Edition), 2021, 42(1): 35-40.
猜你喜欢
山东工业技术(2016年24期)2017-01-12 19:44:32
价值工程(2016年36期)2017-01-11 09:20:00
软件导刊(2016年11期)2016-12-22 21:53:31
软件导刊(2016年11期)2016-12-22 21:30:28
电脑知识与技术(2016年28期)2016-12-21 12:21:32
科技创新与应用(2016年31期)2016-12-03 04:01:54
科技视界(2016年18期)2016-11-03 00:32:24
电脑知识与技术(2016年18期)2016-11-02 18:56:47
电脑知识与技术(2016年22期)2016-10-31 20:38:41
中国科技博览(2016年15期)2016-08-23 01:19:36
