国内仿形技术在农用机械上的应用分析
2023-06-15 07:52:13王金武杨会民陈毅飞周欣蒋永新张佳喜
中国农机化学报 2023年4期
王金武 杨会民 陈毅飞 周欣 蒋永新 张佳喜

摘要:农业的发展离不开农机,为满足农用机械自动化及优良的作业性能,各类技术层出不穷,其中就有仿形技术。仿形技术对农用机械在作业时的稳定性、准确性和作业效果等各方面起到重要作用,同时也对农机的优化起到关键作用。本文对现阶段国内仿形技术的应用进行分析,将应用到农用机械上的仿形技术分为主动仿形技术和被动仿形技术两大类,同时总结归纳两种仿形技术各自的优缺点。被动仿形技术成本较低,一般为纯机械仿形,结构简单且容易检修,但受地面环境影响较大,精确度和灵敏度都不高。主动仿形技术水平要求较高,一般需要电、液配合工作,仿形精度及稳定性都较高,但成本较高而且农用机械领域还没有大范围推广。由于田间环境复杂多变,目前仿形技术中的滞后问题依然存在、传感效果比较一般以及调控起来还相对困难等问题仍然急需解决。随着精尖技术的加入,仿形技术正在朝着更加智能化、简易化的方向稳步发展。
关键词:仿形技术;自动化;调控;智能化;农用机械
中图分类号:S22
文献标识码:A
文章编号:2095-5553 (2023) 04-0031-09
Abstract: Agricultural development is inseparable from agricultural machinery, in order to meet the automation and excellent performance of agricultural machinery, various technologies emerge in an endless stream, among which there is copying technology. Copying technology plays an important role in the stability, accuracy and operation effect of agricultural machinery in operation, and also plays a key role in the optimization of agricultural machinery. This paper analyzes the application of copying technology in China at present, divides the copying technology applied to agricultural tools into active copying and passive copying, and summarizes the advantages and disadvantages of the two copying technologies. Passive copying technology has low cost, is generally pure mechanical copying, simple structure and easy maintenance, but is greatly affected by the ground environment, the accuracy and sensitivity are not high. The level of active copying technology is relatively higher, and generally requires electrical and hydraulic cooperation, with high copying accuracy and stability, but the cost is higher and the field of agricultural machinery has not been widely promoted. Due to the complex and changeable field environment, the lag problem of copying technology still exists in the current, the sensor effect is relatively general, and relatively difficult to control and other problems are still urgently needed to solve, although copying technology has been developed in the field of agricultural machinery, but there is still a long way to go in order to realize the intelligent and simple copying technology. With the addition of precision technology, copying technology is developing steadily towards a more intelligent and easy direction.
Keywords: copying technology; automation; regulate and control; intelligent; agricultural machinery
0 引言
仿形技术对农用机械向自动化、智能化发展有着非常重要的意义。目前国内拥有的农用机械装备涉及众多领域,绝大多数农作物从播種开始一直到收获整个过程都可通过机械设备来完成,但是由于田间环境和地面质量有所不同而导致农机在不同环境下作业效果不稳定等问题,而这些弊端将会对农作物的生长和丰收产生一定的影响。
为了解决由于田间环境而导致农业机械作业不佳的问题,仿形技术被应用的越来越多,目前我国的仿形技术总的可以分为主动仿形和被动仿形两大类型。被动仿形的结构较为简单,应用于环境一般的情况下,一般是由纯机械部件构成且需要有仿形轮紧贴地面。主动仿形的主要组成部分为机械传感机构、升降机构及液压执行系统等,需要的技术要求比较高,适用于环境比较恶劣的田间。两种仿形技术的应用使农机在田间作业时的稳定性和准确性等得到保障,对农机自动化进程具有一定的推动作用。
我国的仿形技术最早是从20世纪50年代才开始萌芽的。当时只有液压的仿形,而且基本上所有的技术和设备都是靠进口。当时一些机械厂主要进口的是苏联等国的仿形机床,而且这些机床一直沿用至今。当进入到60年代,长征和长城这两个当时国内最大的专业仿形机床厂的相继成立,意味着我国的仿形技术进入全新的发展阶段,即已经不依赖国外进口且能够自主研发生产。尤其是进入到70年代的中期之后,由于我国科技水平的突飞猛进,众多高端技术被广泛应用,仿形技术也得到了前所未有的飞跃式发展[1]。经过科研人员的努力和国家的重视,进入90年代后各类仿形装置层出不穷。随着这么多年的不断完善发展和创新,新时代的仿形技术已经广泛应用到机械加工、工程机械、生物科学等众多领域,并且一度扮演着较为重要的角色,在农业机械领域,对播前准备、作物播种和作物收获等农作物整个生长周期的各方面工作均被频繁应用。
近些年来,在加速发展农业机械化的整个进程中,各种各样的问题和挑战都需要去面对和解决。农机的发展离不开土地和农作物,由于土地的凹凸不平或作物枝叶生长的不规律,一般农机的作业性能、稳定性等都会大打折扣,从而影响农机的作业效果和作物的产量,这就使许多农机在田间作业时面临较大挑战。目前随着对仿形技术的不断完善和参与,上述问题都得到了很大的改善,可以有效解决由于仿形问题带来的困扰,使农机可以更好达到預期的作业效果。
本文主要通过梳理国内应用仿形技术的各农机中的典型机型,分析各农机中仿形装置的结构特点及技术,简述仿形装置安装在农机上的具体作用,最后总结了两种不同类型仿形技术的优缺点和意义。
1 被动仿形技术在农机上的应用
被动仿形具体是指农业机械在工作时能够一直使限深装置保持受力平衡状态,使需仿形的主要部件的作业深度可以保持一致,是控制作业深度的一种较常见仿形方式,这类仿形主要适用于旱地农机作业。农用机械中使用被动仿形技术典型的有残膜回收机的主要部件仿形、旱地移栽机仿形等。被动仿形的整体结构是比较简单的,其结构一般是由机架、下压弹簧、摆动机构以及可手动调节的仿形部件等构成。其中手动调节的仿形部件有仿形地轮、镇压轮以及其他可直接接触地面的滚动部件等。
1.1 被动仿形技术在油菜捡拾装置上的应用
油菜的主要机械收获方式是分段收获,在分段收获环节中,油菜捡拾器为捡拾脱粒环节的主要工作部件,其性能的好坏对整机的作业质量来说至关重要。仿形装置在油菜捡拾装置上的应用还较少,2020年江涛等[2]设计了一套仿形装置,由于油菜捡拾装置的结构尺寸特殊,齿带的捡拾器多采用与割台蜗壳铰接,仿形轮与割台蜗壳形成捡拾机构的前后支撑,这样捡拾器可以绕着铰接点进行转动,便于调整捡拾姿态。此仿形装置采用整体仿形,目的是为了解决机器在田间工作时,捡拾器出现的振动和弹跳现象,造成漏捡状况。加入整体仿形结构后,收获的含杂率明显减低,捡拾率明显增高,作业时整机的振动和弹跳得到了有效控制,保证了捡拾器的作业质量和作业效率。
1.2 被动仿形技术在移栽机上的应用
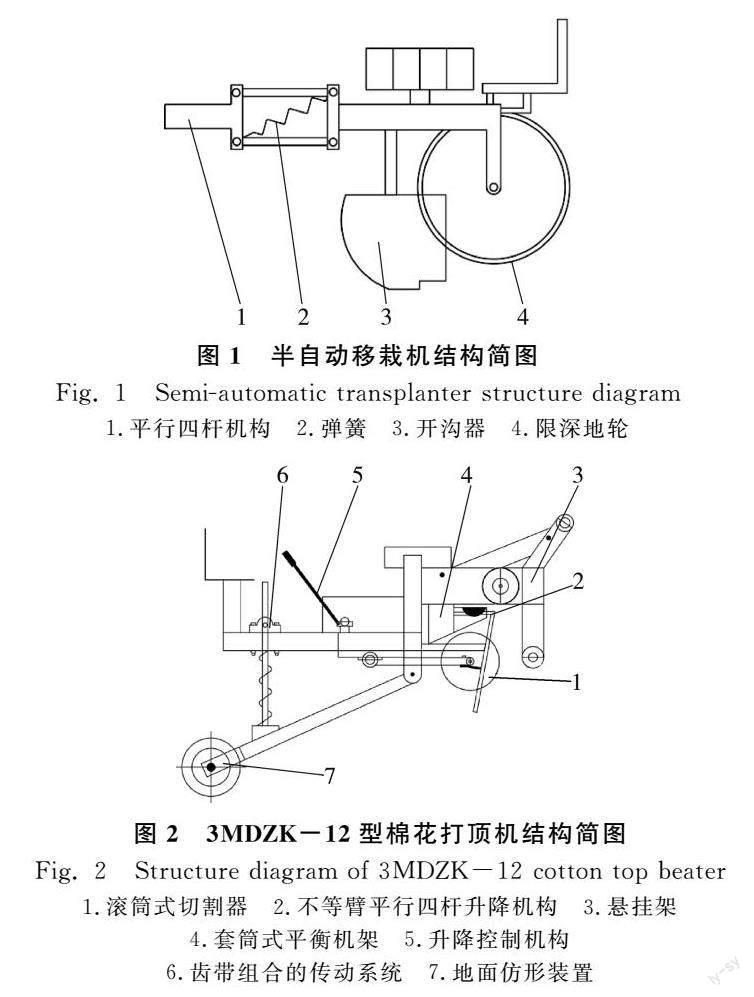
部分移栽机采用被动仿形的方式,此类移栽机的仿形装置在作业前,为了保证作业时的仿形灵敏度和初始栽培深度,需要根据作业田区的具体情况来有效调节限深地轮的高度和弹簧预紧力大小,如果机型是悬挂式的,为保证较合适的栽苗角度,还需要适当调节拖拉机3点悬挂上的拉杆长度,其结构如图1所示。作业过程中,栽植器随牵引力、自身重力和多种外力的共同作用随着地面的起伏进行仿形栽苗,这就有效地实现了植苗过程中对栽深一致性的稳定控制[3]。
国内外采用类似被动仿形原理的移栽机机型有很多,国内较出名的如2ZQ型链夹式移栽机、2YZ1型开沟导苗管式烟草移栽机等都是采用的被动仿形原理。这种被动仿形全是由机械部件构成,仿形的技术原理也较为简单,成本相对来说要低很多,并且可以在一定范围内有效控制植苗的深度,能够较好地达到作业要求[4]。
1.3 被动仿形技术在棉花打顶机上的应用
棉花打顶工作是整个棉花收获过程中必不可少的步骤之一,棉花打顶效果的优良与否可直接影响到棉花生长发育的好坏。胡斌等根据要求开发了3MDZK-12型组控式单行仿形棉花打顶机。这款棉花打顶机的研究与开发,有效地解决了无论是在行内或者行间棉花顶部作业的时候,棉花机械打顶能够独立仿形这一困难,同时也很好地解决了在持续提供动力的情况下,棉花打顶机中全部的切割器能够根据棉株的相对高度的高低自主完成升降仿形工作这一技术难点。在棉株有较高整齐度并且地面没有很明显凹凸起伏的时候,这款棉花打顶机能够持续高效作业并且可以保持稳定可靠。
以上述棉花打顶机机型为例,其应用的仿形技术也是纯机械被动仿形。此机由悬挂架、套筒式平衡仿形机架、滚筒式切割器、升降控制机构、扶禾器以及齿带组合的传动系统等多个部件和机构组成。其整体结构如图2所示。此机在进行工作启动时,联轴器会将拖拉机所传入的动力直接传送至下一级机构变速箱,经变速箱的处理后再经过一对锥齿轮的增速将动力变速输出,随即小带轮转动皮带驱使大带轮进行高速旋转动作,紧接着全部位于6组滚筒式切割器上边的带轮被6个皮带轮带动进行高速旋转,这样使全部滚筒都高速旋转工作。另外,扶禾器的作用就是把杂乱无章的棉花枝杆、枝叶聚拢到一起,将其扶至切割器的可切割范围之内,随即由装在滚筒之间的4把切割刀具通过高速旋转切割掉棉株的枝顶,完成打顶作业。
为了使结构更加紧凑且作业效果更加良好,6组滚筒切割器通过平行四杆机构各自分别套在中间轴和机架的固定轴上。而中间轴带轮以及平行四杆机构一起安装在中间轴上,这样减少传动装置的安装,使结构更加简单。机器工作时,操作员可以通过操纵杆和升降踏板来控制滚筒切割器,令其可以在动力不断的情况下向下端移动,从而实现在打顶工作时,6组切割器可以互不影响,各自独立仿形。
使用套筒将仿形机架的主梁与悬挂架的下端连接起来,利用卡板限制上端前后移动,这样可以起到限位的作用,因为需要承受得住拖拉机的牵引力,上端和下端之间可以以套筒为轴进行左右随意摆动,从而可以确保机器和内部装置高速工作的时候,机架可以保持相对稳定的同时能够相对于地面随机仿形。
1.4 被动仿形技术在残膜回收机上的应用
作业过程中,由于地面的高低起伏和整机的颠簸不定,残膜回收机夹指的入土得不到保障,时深时浅或者入土困难,这就造成了残膜的少收漏收,致使收膜量达不到最大化,导致整体残膜回收率不稳定[5-9]。为解决上述问题,在残膜回收装置上安装仿形机构是必不可少的一部分[10]。夹指链式残膜回收机的仿形方式也属于纯机械式被动仿形,而且采用的是单铰接式机械仿形机构,此仿形机构大量应用于播种机械的开沟作业,在此之前,还没有广泛应用于残膜回收机中[11-16],但近年来被应用的越来越多。
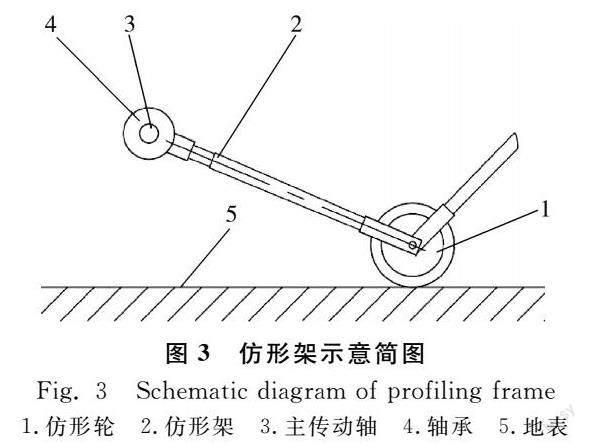
构成此仿形装置的机构有仿形架、仿形轮、切膜圆盘、压紧机构以及刮土板等,其中仿形轮的一边安装有切膜圆盘,其可以将地面上边的残膜切割成丝带状的同时也可以起到仿形作用,而压紧弹簧本身所产生的预压力可以使仿形轮等仿形机构一直紧紧地贴着地表工作。
1.4.1 仿形架
仿形架要与主传动轴相连接,连接方式为轴承连接(需2个双面球轴承)。同时仿形架的前端铰接在主动轴上边,主动轴与机架相连接,其后端则与切膜圆盘、仿形轮以及收膜架的下端同轴相接。机器在工作的过程中,由于仿形架的拖曳,仿形轮则能够跟随整机在地表上边向前自由滚动,并且会随着压紧弹簧受的压力大小上下浮动,即可实現对地面高低起伏程度的仿形。仿形架的结构如图3所示。
1.4.2 仿形轮与切膜圆盘
机具在工作的过程中,仿形轮由于压紧弹簧的预紧力能够紧贴于地表进行滚动,它的主要作用是要确保同轴一侧的下收膜链轮在途经凹凸不平的地面时,确保下收膜链轮能够同地面之间的距离在合理的间距范围中,从而可以保证回收装置的夹指在夹取残膜的时候能够轻松有效入土,且入土深度能够保持相对稳定。切膜圆盘固定联接于仿形轮的侧面,同时切膜圆盘的内圈可以作为仿形轮的轮辐,这样安装设计可以契合机具的空间大小,令结构更加紧凑、更加简单。这样切膜圆盘在进行整个切膜工作的过程中就能够实现对地面的仿形。此外,切膜圆盘的侧面安装的有碎土齿,以便更好地疏松位于地表中的残膜。
1.4.3 压紧机构
将切膜圆盘和仿形轮整合到一起,为了确保整体收膜的质量,在田间进行收膜作业时,要保证切膜圆盘可以正常地切入地面,才能够有效地将地表残膜切成带状,这样收膜时会比较方便,更需保证切膜圆盘进入地面的同时仿形轮也能够紧压在地表进行滚动。因为田间环境比较复杂,大多地表不平整,切膜圆盘的入土深度一旦达不到有效深度,仿形轮就会被迫离开地表,这样的话会导致仿形工作失效,就有可能造成夹指不能充分有效地进入土壤夹取残膜的结果。安装压紧机构的目的是要确保仿形轮可以稳定可靠地紧压在地面,导杆上边安装的有压紧弹簧,导杆的上部与机架相连接,压紧机构的下压力可以通过张紧螺母来进行调节,从而能够调节压紧机构对仿形轮所施加的压力大小。压紧机构的结构如图4所示。
1.5 被动仿形技术在不同农机上的应用对比分析
被动仿形技术在不同农机上的应用对比分析如表1所示。
1) 被动仿形结构简单,由纯机械结构组成,成本较低,能够更好地接触地面,可直接进行仿形工作。
2) 被动仿形受土壤软硬程度变化及地块的整地质量影响较大。如果作业地块的耕地质量或整地质量较差,就会造成土壤表层的软硬程度有差异,则将引起土壤表层的支撑力不够稳定,这样对农机的仿形能力会产生一定程度的影响。
3) 作业时,被动仿形动作相对滞后。从理论上而言,滞后误差应当与水平距离基本成正比关系,但是由于农机行进速度、农机结构的工艺等种种因素,这种滞后误差几乎没有办法消除,对仿形的精度会产生比较大的影响。
2 主动仿形技术在农机上的应用
目前的主动仿形大部分采用机械传感和液压执行相结合的方式来实现,在水田、丘陵以及部分旱地等地形环境较差的田间应用较多。这种仿形方式的主要组成部分为机械传感机构、升降机构及液压执行系统等,机械传感机构大致包括仿形轮、仿形拖板及推拉连杆等,而液压执行系统则包括电磁阀、仿形阀及升降油缸等。
主动仿形工作原理大致为:
1) 通过机械传感机构和地表相接触来感应地面的高低起伏变化,将地面的变化传递到液压系统,随后液压系统做出相应反应驱动油缸实施伸缩动作,从而实现仿形动作。
2) 通过角度传感器、激光传感器、陀螺仪等一系列传感装置对机器作业时相对于地面或其他参照物的变化等做出一系列反馈,通过已经编程好的设备驱使电磁阀体做出响应,从而驱动油缸的伸缩升降等,从而实现仿形动作[17-19]。
2.1 主动仿形技术在花生收获机上的应用
花生收获机中所应用的仿形技术主要是解决其挖掘铲挖掘深度的问题,在作业时需要保证挖掘深度一直一致,这样可以防止漏挖、挖破或者破坏土质等问题的发生。代表机型为4HLB-2型花生联合收获机,其地面仿形装置如图5所示。超声波传感器测量距离时具有高效率、高精度的特点,是较为常用测量距离的工具之一,由于田间地表的环境相对比较复杂多变,从超声波的传播理论出发,超声波在正常无遮挡途径情况下传播时,属于正常无障碍传播,但如果传播过程中遇到其他物体,且碰到的物体直径小于超声波半个波长的时候,声波就会把障碍物绕过去而继续往前传播,就是产生绕射现象[20]。接触地表的仿形机构直接焊接于清土装置一旁的护梁上边,这样设计主要是为了花生收获机在正常作业时能够有效实现自动限深的效果,超声波传感器发出来的声波需要直接射到地面仿形机构上面,这样声波传播过程中就可以躲过花生植株体,从而避免绕射现象的发生,因而测量精度就会更高,作业更有效。
地面仿形机构由地轮、导向管、焊接板、压簧、长螺杆以及测量基准板等组成。压簧嵌套于长螺杆上,长螺杆位于导向管a和导向管b的内部,跟随地面的起伏不定,导向管b在导向管a内上下不停滑动,两个导向管中间安装有六角头螺栓,其安装目的是限制导向管b在长螺杆轴线方向旋转的自由度,以确保实现更加有效的导向作用。
机具工作时,测量超声波发射出来的一端至地面仿形机构之间距离,就能够间接地得到地表的凹凸程度和起伏变化,已经测量得到的挖掘深度变化值会将输入到模糊PID控制器中,模糊PID控制器中有模糊控制规则表,将此表当作参考表,把测得的数据与其进行对照,如若需要发出相应动作,则可以由控制器发射相应控制信号至电磁阀,随后用电磁阀去控制油缸进行伸缩动作,这样整个循环反馈就可以完成相对应的控制任务。
2.2 主动仿形技术在自动喷雾机上的应用
风送喷雾装置是农作物喷雾作业领域中最为重要和突出的技術装备之一,多年来得到了广泛的应用,拥有非常好的应用前景[21]。可是对于一般果园使用传统的风送式喷雾机在对果树等施药的过程中,其会连续不间断喷药,这就很容易造成农药的浪费和环境污染的严重后果,最重要的是还会致使农产品因喷药过量而受到污染,影响到消费者的身体健康[22-23]。
此自动仿形喷雾机所采用的仿形技术是主动仿形中的第2种仿形方式。把喷雾机和探测传感器(红外线传感器等)结合起来,作物或杂草的冠层特征一经改变,机器则可以自动实时改变喷雾参数,比如可以自动调节喷头喷药的流量或风机的风量等[24],这样能够达到按需施药的目的,从而不仅仅提高了农药的有效利用率,而且还有效降低了因为农药的流失对环境造成的危害[25]。
2.3 主动仿形技术在玉米播种机上的应用
精密播种是提高玉米产量的关键[26]﹐要实现精密播种就需要对玉米种子的粒距一致性、播深一致性提出更高要求[27]。播深影响玉米的出苗时间、出苗率、玉米冠层结构以及光合特性,进而影响到玉米的产量[28-31]。在特定的土壤环境中,保持合适且一致的播深和压实度,就能够确保种子与土壤较良好的接触,使种子更加易于从土壤中汲取所需水分,对种子的快速出苗产生较大影响[32-34]。土壤的质地变化与作业地面的地形变化是影响播深变异性的主要因素之一[35]。目前,在玉米播种机上大多是采用单体仿形技术来达到可以精确仿形的效果,并且通过下压力控制技术能够进一步提高播种单体对田间土壤质地变化的适应性[36]。在直接测量控制方面,蔡国华[37]、Wen[38]采用超声波传感器对播深进行实时监控检测,并且还设计了控制系统,通过液压系统来调节播深。赵金辉等[39]设计出了利用位移传感器作为传感机构的播深控制系统,通过液压执行系统来灵活调节四连杆仿形机构对地形的感知,并做出相应的仿形动作,以这样的方式对播种深度进行有效调节,测量得到的播种深度的稳定性系数到达90%以上。
玉米播种机播深和压实仿形技术通过实时调节施加在四连杆仿形机构上的液压力调节下压力,实现播深的间接控制,通过实时调节镇压机构处的弹簧伸长量调节镇压力,从而间接控制压实度,提高玉米播深合格率和一致性,并保持适宜的压实度,可以确保种子和土壤的良好接触,这样有效地为玉米在苗期阶段的成长提供了保障,对其产量的提升有较大意义[40]。
整个系统主要是由测控系统、液压系统和用于播深压实的机械机构三个部分组成。测控系统主要是由下压力传感器、油压传感器、镇压力传感器、车载终端以及PLC控制器等组成,这些传感器和构件等各司其职,共同协作。播深和压实度综合控制系统的结构框图如图6所示。
在限深块上安装下压力传感器,限深块带有孔,与下压力传感器铰接,限深块的外壁与限深块安装座孔的内壁之间留有空隙,限深轮拐臂所产生的作用力向上传递到限深块上,然后限深块可对下压力传感器产生作用力,这样下压力传感器可测得限深块和限深轮拐臂之间的作用力,即为下压力。下压力传感器的安装方式如图7所示。
2.4 主动仿形技术在不同农机上的应用对比分析
主动仿形技术在不同农机上的应用对比分析如表2所示。
1) 主动仿形系统可以在一定程度上一直保持作业稳定,仿形精度比较高,反应时间可按需随意调节,结构也较为简单,整个仿形动作也更加主动,滞后问题也得到大大改善。
2) 对所有农机而言,国内主动仿形技术还不够成熟,同时因为技术要求较高、成本较高,在农用机械中并没有大范围推广。但随着智能化时代的到来,对主动仿形技术有了更深入的研究,主动仿形也将被应用得越来越多。
3 存在问题
1) 被动仿形主要是由纯机械机构构成,作业过程中的精度以及仿形效果会比较差,并且安装上去之后将不可再控,根据要求不同,需要频繁调试,对于一套装置是否可以适用多种地形还需要深入研究。
2) 主动仿形中虽然利用电—液控制大大改善了仿形的滞后问题,但由于农机行进速度、地形状态、液压系统的响应灵敏性等各种因素依然存在滞后问题,针对精准快速控制还有待改善。
3) 目前主动仿形中应用的传感方式主要是角度传感器和陀螺仪,安装在农用机械上的实用效果还不是太理想,是否可以利用其他精度更高的传感方式令仿形效果更好,此问题也还有待研究。
4) 主动仿形中的电—液配合控制对部分农机操作者来说技术难度相对较高,按照所需控制要求不能对仿形参数进行正常调控,因此针对主动仿形系统的操作简易化、轻松化还应加强研究。
4 发展趋势
1) 目前由于考虑到对于仿形精度和仿形质量要求较高,在被动仿形技术的基础上添加各种类型的控制系统,使其过渡为较为完善的主动仿形技术。在此过程中,还需继续研究探索,在原有的基础上添加合适的精尖技术,如选取更加适合的传感方式,使其与主动仿形技术较好的结合,更加缩短信号传递所需时间,实现更加精准快速地控制,这样可以将仿形技术的优点发挥到最大化。
2) 当前主动仿形将配套电控系统广泛引入其中,采用多种类型的电控传感器将地形凹凸变化等转换为电信号,经过控制器的运算后,再经信号放大电路直接传递给电—液转换机构,随后使液压执行机构来驱动部件执行相对应的伺服动作。这样的仿形结构也不是很复杂,调试起来也比较方便快捷,响应速度更加快,并且可以根据不同算法(如模糊PID)对农机主要部件进行更加精准的位置控制,对农用机械自动化进程的加速有着重要意义。
3) 随后在仿形技术方面,需在电—液配合的基础上加入更加便捷的控制调节装置,如控制面板等控制技术,使整个仿形技术在参数调节、反应时效等问题上得到较为明显的改善,对于不同地形、不同环境可以随意调节反应时间等参数,就可以进一步改善农机在作业时的稳定性以及其本身的功能,也可以使整个系统操控起来变得简单快捷。仿形技术也在朝着智能化、简易化方向稳步发展。
5 结语
被動仿形适合用于农机作业类型中的露地作业,此类仿形结构相对更加简单,调试起来也更加简单方便。如果作业的田间地块没有较大凹凸起伏且整地质量较好,机具工作能力和加工的质量、精度也比较高,那么应用到被动仿形技术的农机,可以在人工参与的情况下达到较好的作业效果。
随着液压系统的完善与发展,主动仿形也在逐步完善及应用。通过对原理和结构的深入研究和大量试验、对机构的不断改进和优化、对液压系统的响应灵敏度进行更加稳定的控制,仿形传感机构信号的传递效率有较明显的提升,同时也大大改善了在工作过程中农业机械的稳定性和可靠性,使农机操作和维护起来更加简单,间接提升了农作物的产量,从而使主动仿形技术得到逐步完善和更广泛的应用。
仿形机构的研究与发展会快速推动我国农业机械向自动化、智能化发展,大大改善了农业机械作业性能,对农机作业效率及作物的收成有重要意义,对农业机械的优化也提供了巨大帮助。随着智能化时代的到来,仿形越来越成为机械设备中必不可少的技术,并且对其研究将会愈加深入。
参 考 文 献
[1] 凌国平. 我国仿形技术发展和使用的调查分析[J]. 镇江船舶学院学报, 1990, 4(1): 86-95.
[2] 江涛, 关卓怀, 梁苏宁, 等. 齿带式油菜捡拾器仿形减振装置设计与试验[J]. 农业机械学报, 2020, 51(11): 148-157.
Jiang Tao, Guan Zhuohuai, Liang Suning, et al. Design and experiment of profiling and damping device for rapeseed tooth-belt pickup [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(11): 148-157.
[3] 白晓虎, 李芳, 张祖立, 等. 基于ADAMS的免耕播种机仿形机构弹簧参数优化[J]. 干旱地区农业研究, 2014, 32(6): 268-272, 278.
Bai Xiaohu, Li Fang, Zhang Zuli, et al. Parameter optimization for the profiling mechanism spring of no-till planter based on ADAMS [J]. Agricultural Research in the Arid Areas, 2014, 32(6): 268-272, 278.
[4] 袁文胜, 吴崇友, 于修刚, 等. 粘重土壤条件下油菜移栽机械化研究前景初探[J]. 中国农机化, 2011(1): 69-71, 77.
Yuan Wensheng, Wu Chongyou, Yu Xiugang, et al. Preliminary study on the researching prospect of rape transplanter in heavy soil conditions [J]. Chinese Agricultural Mechanization, 2011(1): 69-71, 77.
[5] 侯书林, 胡三媛, 孔建铭, 等. 国内残膜回收机研究的现状[J]. 农业工程学报, 2002, 18(3): 186-190.
Hou Shulin, Hu Sanyuan, Kong Jianming, et al. Present situation of research on plastic film residue collector in China [J]. Transactions of the Chinese Society of Agricultural Engineering, 2002, 18(3): 186-190.
[6] 赵海军, 史建新. 残膜回收工艺探讨[J]. 中国农机化, 2004(6): 68-71.
Zhao Haijun, Shi Jianxin. Discussion on technology of collecting plastic film residue [J]. Chinese Agricultural Mechanization, 2004(6): 68-71.
[7] 张东兴. 残膜回收机的设计[J]. 中国农业大学学报, 1999, 4(6): 41-43.
Zhang Dongxing. Research and design on collector of used plastic film on farm field [J]. Journal of China Agricultural University, 1999, 4(6): 41-43.
[8] 那明君, 董欣, 侯书林, 等. 残膜回收机主要工作部件的研究[J]. 农业工程学报, 1999, 15(2): 112-115.
Na Mingjun, Dong Xin, Hou Shulin, et al. Research on main components of the machine for retrieving the used plastic film after harvesting [J]. Transactions of the Chinese Society of Agricultural Engineering, 1999, 15(2): 112-115.
[9] 王学农, 史建新, 郭俊先, 等. 悬挂式棉秆粉碎还田搂膜机搂膜机构的设计与试验研究[J]. 农业工程学报, 2008, 24(1): 135-140.
Wang Xuenong, Shi Jianxin, Guo Junxian, et al. Experimental study and design on film raking mechanism of hanging film raker with cotton stalk crushing and returning to field [J]. Transactions of the Chinese Society of Agricultural Engineering, 2008, 24(1): 135-140.
[10] 王科杰, 胡斌, 罗昕, 等. 残膜回收机单组仿形搂膜机构的设计与试验[J]. 农业工程学报, 2017, 33(8): 12-20.
Wang Kejie, Hu Bin, Luo Xin, et al. Design and experiment of monomer profiling raking-film mechanism of residue plastic film collector [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(8): 12-20.
[11] 姚宗路, 王晓燕, 高焕文, 等. 小麦免耕播种机种肥分施机构的改进与应用效果[J]. 农业工程学报, 2007, 23(1): 120-124.
Yao Zonglu, Wang Xiaoyan, Gao Huanwen, et al. Improvement and experiment on the device for separate application of fertilizer and seed for no-till wheat drill [J]. Transactions of the Chinese Society of Agricultural Engineering, 2007, 23(1): 120-124.
[12] 蔣金琳, 龚丽农, 王明福. 免耕播种机单体工作性能试验研究[J]. 农业工程学报, 2000, 16(5): 64-65.
Jiang Jinlin, Gong Linong, Wang Mingfu. Study on the working performance of the no-tillage planter unit [J]. Transactions of the Chinese Society of Agricultural Engineering, 2000, 16(5): 64-66.
[13] 张晋国, 高焕文. 免耕播种机新型防堵装置的研究[J]. 农业机械学报, 2000, 31(4): 33-35.
Zhang Jinguo, Gao Huanwen. Study on the strip chopping anti-blocking mechanism [J]. Transactions of the Chinese Society for Agricultural Machinery, 2000, 31(4): 33-35.
[14] 范旭辉, 贾洪雷, 张伟汉, 等. 免耕播种机仿形爪式防堵清茬机构参数分析[J]. 农业机械学报, 2011, 42(10): 56-60.
Fan Xuhui, Jia Honglei, Zhang Weihan, et al. Parametric analysis of finger-type anti-blocking residue-cleaner for no-till planting [J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(10): 56-60.
[15] 张喜瑞, 何进, 李洪文, 等. 免耕播种机驱动圆盘防堵单元体的设计与试验[J]. 农业工程学报, 2009, 25(9): 117-121.
Zhang Xirui, He Jin, Li Hongwen, et al. Design and experiment on the driving disc of anti-blocking unit for no-tillage planter [J]. Transactions of the Chinese Society of Agricultural Engineering, 2009, 25(9): 117-121.
[16] 李阳, 王吉奎, 龚贺贺, 等. 夹指链式残膜回收机[P]. 中国专利: 2015106796692, 2015-12-30.
[17] 陈远玲, 吴龙, 叶才福, 等. 插秧机液压升降及水平摆动系统的建模与仿真[J]. 液压与气动, 2015(12): 87-90.
Chen Yuanling, Wu Long, Ye Caifu, et al. The modeling and simulation on hydraulic lifting and swing system of transplanter [J]. Chinese Hydraulics & Pneumatics, 2015(12): 87-90.
[18] 常德山. 插秧机的分类及插植原理[J]. 湖南农机, 2013(4): 23.
[19] 顾立峰, 张庆荣, 陆跃德, 等. 手扶式和高速乘座式插秧机的仿形液压系统简介[J]. 农业机械, 2007(2): 159.
[20] 游兆延, 胡志超, 吴努, 等. 基于NEC单片机田间用超声波测距的实现[J]. 电子设计工程, 2014, 22(6): 137-139.
You Zhaoyan, Hu Zhichao, Wu Nu, et al. Ultrasonic distance measure ap-plication in field based on NEC microcomputer [J]. Electronic Design Engineering, 2014, 22(6): 137-139.
[21] Lee W S, Slaughter D C, Giles D K. Robotic weed control system for tomatoes [J]. Precision Agriculture, 1999, 1(1): 95-113.
[22] 邱白晶, 闫润, 马婧, 等. 变量喷雾技术研究进展分析[J]. 农业机械学报, 2015, 46(3): 59-72.
Qiu Baijing, Yan Run, Ma Jing, et al. Research progress analysis of variable rate sprayer technology [J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 59-72.
[23] 何雄奎, 严苛荣, 储金宇, 等. 果园自动对靶静电喷雾机设计与试验研究[J]. 农业工程学报, 2003, 19(6): 78-80.
He Xiongkui, Yan Kerong, Chu Jinyu, et al. Design and testing of the automatic target detecting, electrostatic, air assisted, orchard sprayer [J]. Transactions of the Chinese Society of Agricultural Engineering, 2003, 19(6): 78-80.
[24] 王萬章, 洪添胜, 李捷, 等. 果树农药精准喷雾技术[J]. 农业工程学报, 2004, 20(6): 78-80.
Wang Wanzhang, Hong Tiansheng, Li Jie, et al. Review of the pesticide precision orchard spraying technologies [J]. Transactions of the Chinese Society of Agricultural Engineering, 2004, 20(6): 78-80.
[25] 邹建军, 曾爱军, 何雄奎, 等. 果园自动对靶喷雾机红外探测控制系统的研制[J]. 农业工程学报, 2007, 23(1): 129-132.
Zou Jianjun, Zeng Aijun, He Xiongkui, et al. Research and development of infrared detection system for automatic target sprayer used in orchard [J]. Transactions of the Chinese Society of Agricultural Engineering, 2007, 23(1): 129-132.
[26] 杨丽, 颜丙新, 张东兴, 等. 玉米精密播种技术研究进展[J]. 农业机械学报, 2016, 47(11): 38-48.
Yang Li, Yan Bingxin, Zhang Dongxing, et al. Research progress on precision planting technology of maize [J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(11): 38-48.
[27] 苑严伟, 白慧娟, 方宪法, 等. 玉米播种与测控技术研究进展[J]. 农业机械学报, 2018, 49(9): 1-18.
Yuan Yanwei, Bai Huijuan, Fang Xianfa, et al. Research progress on maize seeding and its measurement and control technology [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(9): 1-18.
[28] 吴海燕, 崔彦宏, 孙昌凤. 不同类型玉米杂交种播深与出苗相关性的研究[J]. 玉米科学, 2011, 19(2): 109-113.
Wu Haiyan, Cui Yanhong, Sun Changfeng. Study on relations of sowing depth and seedling emergence of different types of maize seeds [J]. Journal of Maize Sciences, 2011, 19(2): 109-113.
[29] 岳丽杰, 文涛, 杨勤, 等. 不同播深对玉米出苗的影响[J]. 玉米科学, 2012, 20(5): 88-93.
Yue Lijie, Wen Tao, Yang Qin, et al. Effects of different sowing depths on seeding emergence of maize [J]. Journal of Maize Sciences, 2012, 20(5): 88-93.
[30] 曹慧英, 史建国, 朱昆仑, 等. 播深对夏玉米冠层结构及光合特性的影响[J]. 玉米科学, 2016, 24(1): 102-109.
Cao Huiying, Shi Jianguo, Zhu Kunlun, et al. Effects of sowing depth on canopy structure and photosynthetic characteristics of summer maize [J]. Journal of Maize Sciences, 2016, 24(1): 102-109.
[31] Karayel D, Ozmerzi A. Effect of tillage methods on sowing uniformity of maize [J]. Canadian Biosystems Engineering, 2002, 44: 2-23.
[32] Poncet A M, Fulton J P, Mcdonald T P, et al. Effect of heterogeneous field conditions on corn seeding depth accuracy and uniformity [J]. Applied Engineering in Agriculture, 2018, 34(5): 819-830.
[33] Hakansson I, Arvidsson J, Keller T, et al. Effects of seedbed properties on crop emergence: 1. Temporal effects of temperature and sowing depth in seedbeds with favourable properties [J]. Acta Agriculturae Scandinavica, Section B-Plant Soil Science, 2011, 61(5): 458-468.
[34] Knappenbercer T, Koller K. Spatial assessment of the correlation of seeding depth with emergence and yield of corm [J]. Precision Agriculture, 2012, 13: 163-180.
[35] Badua S A, Sharda A, Flippo D, et al. Real-time gauge wheel load variability of a row-crop planter during field operation [J]. Applied Engineering in Agriculture, 2018, 61(5): 1517-1527.
[36] Poncet A M, Fulton J P, Mcdonald T P, et al. Corn emergence and yield response to row-unit depth and downforce for varying field conditions [J]. Applied Engineering in Agriculture, 2019, 35(3): 399-408.
[37] 蔡国华, 李慧, 李洪文, 等. 基于ATmega128单片机的播深自控系统试验台的设计[J]. 农业工程学报, 2011, 27(10): 11-16.
Cai Guohua, Li Hui, Li Hongwen, et al. Design of test-bed for automatic depth of furrow opening control system based on ATmega128 single chip microcomputer [J]. Transactions of the Chinese Society of Agricultural Engineering, 2011, 27(10): 11-16.
[38] Wen L, Fan X, Liu Z, et al. The design and development of the precision planter sowing depth control system [J]. Sensors & Transducers, 2014, 162(1): 53-58.
[39] 赵金辉, 刘立晶, 杨学军, 等. 播种机播深控制系统的设计与室内试验[J]. 农业工程学报, 2015, 31(6): 35-41.
Zhao Jinhui, Liu Lijing, Yang Xuejun, et al. Design and laboratory test of control system for depth of furrow opening [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(6): 35-41.
[40] 白慧娟, 方憲法, 王德成, 等. 玉米播种机播深和压实度综合控制系统设计与试验[J]. 农业机械学报, 2020, 51(9): 61-72.
Bai Huijuan, Fang Xianfa, Wang Decheng, et al. Design and test of control system for seeding depth and compaction of corn precision planter [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(9): 61-72.
猜你喜欢
军事文摘(2022年19期)2022-10-18 02:41:14
印刷工业(2020年4期)2020-10-27 02:45:52
学苑创造·A版(2020年12期)2020-01-07 14:07:23
中国外汇(2019年15期)2019-10-14 01:00:34
中国交通信息化(2017年4期)2017-06-06 07:21:52
中国科技博览(2016年18期)2016-10-19 07:01:13
中国市场(2016年36期)2016-10-19 03:40:15
科技视界(2016年20期)2016-09-29 14:13:02
科技视界(2016年20期)2016-09-29 13:45:10
作文教学研究(2016年1期)2016-07-05 12:22:47