
单输入多输出式压电微夹钳的结构设计与分析
2023-06-15 08:42:07王根华朱心怡潘钟宁温瑞
无线互联科技 2023年3期
王根华 朱心怡 潘钟宁 温瑞
摘要:文章对现有压电微夹钳结构及位移输出特性进行分析,设计了一种单输入多输出式压电微夹钳。该单输入多输出式压电微夹钳具有结构简单、输出位移可选、振荡小、不易破坏操作对象等优点。文章详细介绍了该微夹钳的结构,并建立起了位移放大倍率模型;利用ANSYS仿真软件对所设计的微夹钳进行分析,仿真结果如下:z方向施加1×10-5mm位移后,钳指指尖顶端可分别产生3.2×10-5 mm和5.1×10-5 mm位移量;施加间隔为10V的驱动电压,得出其前6阶固有频率,仿真值与解析值具有较高的吻合度,验证了该压电微夹钳结构的可行性与所建数学模型的正确性。
关键词:压电微夹钳;输出位移;ANSYS仿真
中图分类号:TH39 文献标志码:A
0 引言
近年来,随着微机电系统(MEMS)等高科技的快速发展,微操作的研究取得了巨大的进展,现已广泛应用于航空航天、精密加工、光纤校对、生物医药、通信工程等众多领域[1]。微夹持器(微夹具)是一种与微物体直接接触的终端操纵器,鉴于微物体轻、小、薄、软的特点,微夹持器的结构性能对微操作的实现有着重大影响[2]。
微夹持器研究核心问题是驱动模式的选择,增加位移放大率。目前,微夹具的常见驱动模式包括压电驱动[3]、静电驱动[4]、热驱动[5]、形状记忆合金驱动[6]、电磁驱动和气动驱动[7]。与其他驱动模式相比,压电驱动具有响应速度快、灵敏度高、输出力大等优点,因而得到了广泛的应用[8]。
位移放大率主要是通过位移放大器来实现的。常用的微位移放大器是基于杠杆式放大原理和桥式放大原理实现的。基于杠杆放大原理设计的单级放大器易于实现,但其结构不够紧凑,理论放大系数受空间大小的限制。多级放大器可以进一步扩大微夹持器的夹持行程,提高放大度,近年来对多级放大器的研究逐渐增多。如王代华等[9]基于杠杆放大的原理设计了一种单级微夹持器,以实现位移的放大,但不能实现平行夹持。崔玉国等[10]设计了一种基于杠杆放大原理的两级微夹具,实现了下爪的平行夹持。然而,这个结构还不够紧凑。荣伟彬等[11]基于杠杆放大原理设计了一个微夹子,其结构紧凑,但存在放大倍数有限的问题。
綜上所述,本文设计了一种微夹持器,夹持器左右侧采用不同结构,具有结构简单,单一位移输入后,输出位移模式和放大倍数可选、振荡小、不易破坏操作对象等优点,可在同一输入下获得不同位移,实现高精度平行加持和单级微加持,用来满足不同工况下的使用要求。
1 压电执行器结构设计
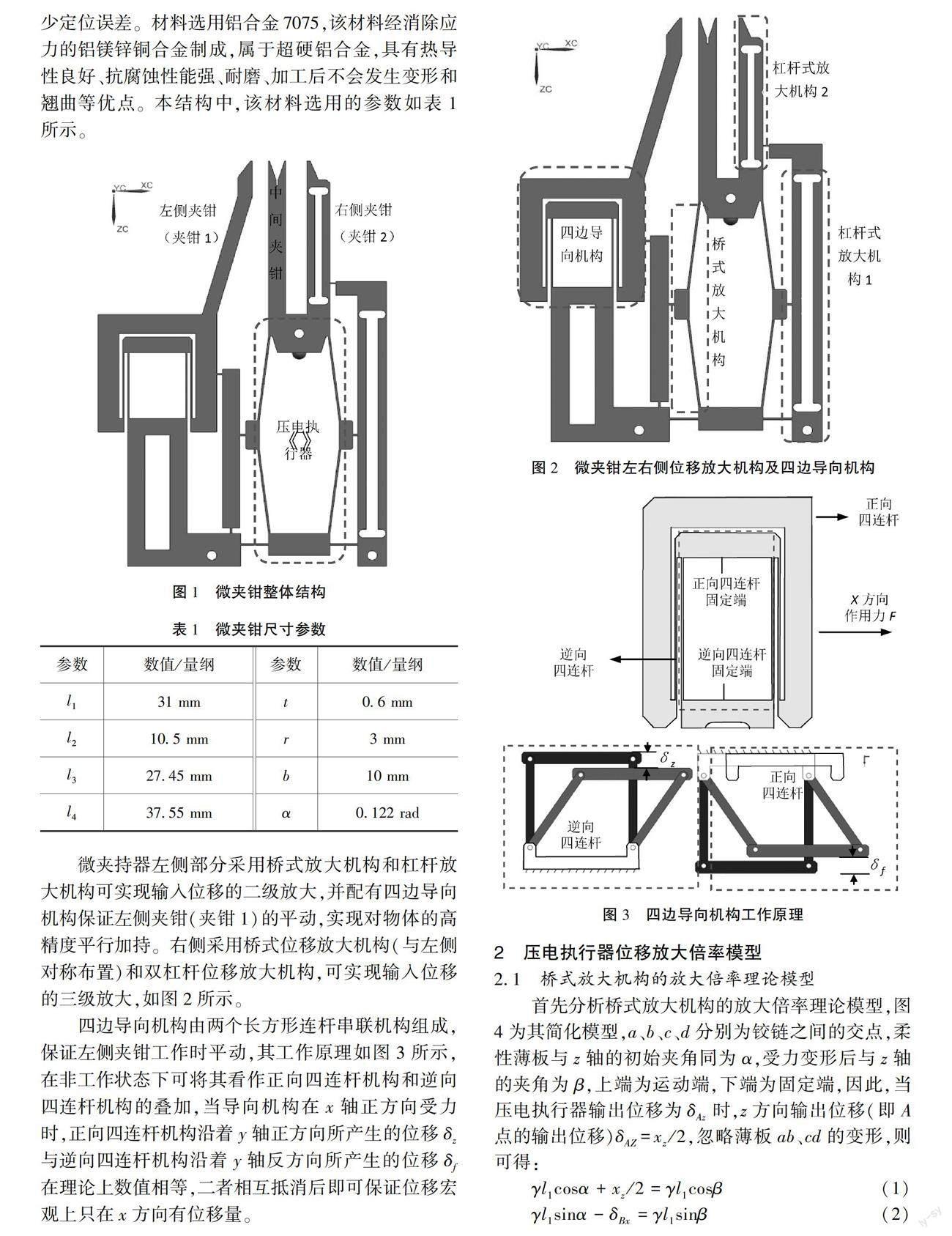
本文所设计的单输入多输出式压电微夹钳整体结构如图1所示,整体尺寸148×100×10mm,包括3个钳指、1个压电执行器。中间夹钳为固定共享构件,与左右侧夹钳配合,完成夹持动作。由于左右两部分的位移放大机构不同,其中左侧夹钳(夹钳1)可实现高精度平行加持,右侧夹钳(夹钳2)可实现与左侧夹钳输出位移精度的平行夹持。为保证微夹钳的加工精度,实际加工过程中采用单板一次性加工,减少定位误差。材料选用铝合金7075,该材料经消除应力的铝镁锌铜合金制成,属于超硬铝合金,具有热导性良好、抗腐蚀性能强、耐磨、加工后不会发生变形和翘曲等优点。本结构中,该材料选用的参数如表1所示。
微夹持器左侧部分采用桥式放大机构和杠杆放大机构可实现输入位移的二级放大,并配有四边导向机构保证左侧夹钳(夹钳1)的平动,实现对物体的高精度平行加持。右侧采用桥式位移放大机构(与左侧对称布置)和双杠杆位移放大机构,可实现输入位移的三级放大,如图2所示。
四边导向机构由两个长方形连杆串联机构组成,保证左侧夹钳工作时平动,其工作原理如图3所示,在非工作状态下可将其看作正向四连杆机构和逆向四连杆机构的叠加,当导向机构在x轴正方向受力时,正向四连杆机构沿着y轴正方向所产生的位移δz与逆向四连杆机构沿着y轴反方向所产生的位移δf在理论上数值相等,二者相互抵消后即可保证位移宏观上只在x方向有位移量。
2 压电执行器位移放大倍率模型
2.1 桥式放大机构的放大倍率理论模型
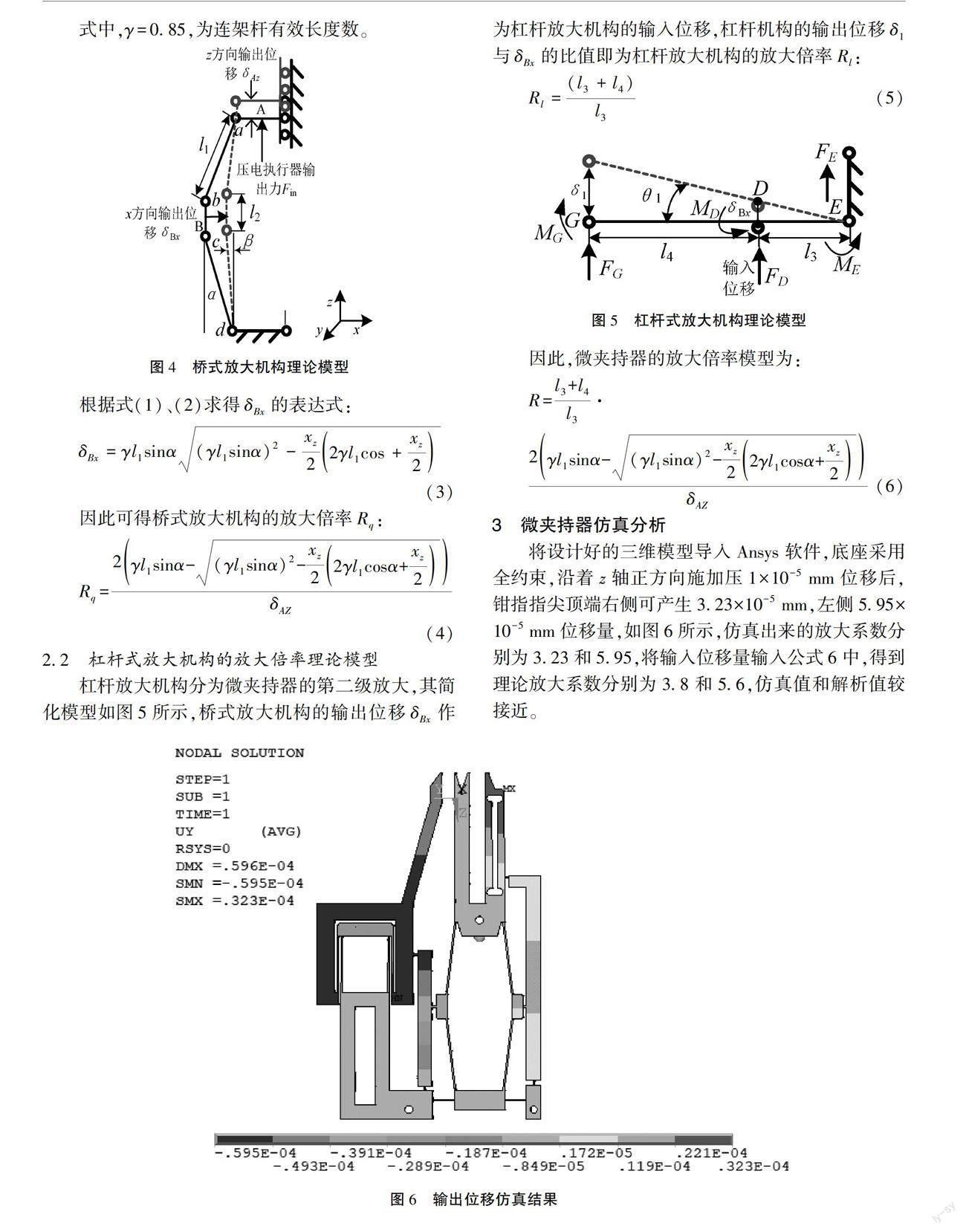
首先分析桥式放大机构的放大倍率理论模型,图4为其简化模型,a、b、c、d分别为铰链之间的交点,柔性薄板与z轴的初始夹角同为α,受力变形后与z轴的夹角为β,上端为运动端,下端为固定端,因此,当压电执行器输出位移为δAz时,z方向输出位移(即A点的输出位移)δAZ=xz/2,忽略薄板ab、cd的变形,则可得:
γl1cosα+xz/2=γl1cosβ(1)
γl1sinα-δBx=γl1sinβ(2)
式中,γ=0.85,为连架杆有效长度数。
根据式(1)、(2)求得δBx的表达式:
δBx=γl1sinα(γl1sinα)2-xz22γl1cos+xz2(3)
因此可得桥式放大机构的放大倍率Rq:
Rq=2γl1sinα-(γl1sinα)2-xz22γl1cosα+xz2δAZ(4)
2.2 杠杆式放大机构的放大倍率理论模型
杠杆放大机构分为微夹持器的第二级放大,其简化模型如图5所示,桥式放大机构的输出位移δBx作 为杠杆放大机构的输入位移,杠杆机构的输出位移δ1与δBx的比值即为杠杆放大机构的放大倍率Rl:
Rl=(l3+l4)l3(5)
因此,微夹持器的放大倍率模型为:
R=l3+l4l3·
2γl1sinα-(γl1sinα)2-xz22γl1cosα+xz2δAZ(6)
3 微夹持器仿真分析
将设计好的三维模型导入Ansys软件,底座采用全约束,沿着z轴正方向施加压1×10-5 mm位移后,钳指指尖顶端右侧可产生3.23×10-5 mm,左侧5.95×10-5 mm位移量,如图6所示,仿真出来的放大系数分别为3.23和5.95,将输入位移量输入公式6中,得到理论放大系数分别为3.8和5.6,仿真值和解析值较接近。
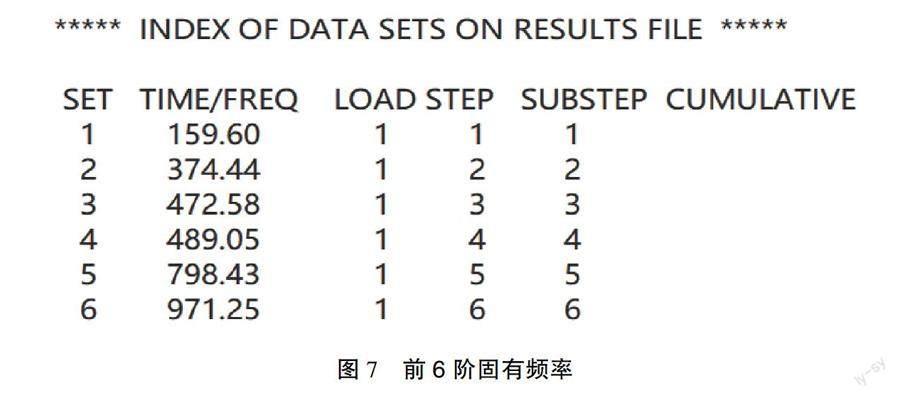
对该微夹钳进行动态特性仿真分析,图7给出了该微夹钳的前6阶固有频率,分别为159.60 Hz、374.44 Hz、472.58 Hz、489.05 Hz、798.43 Hz、971.25 Hz,如图7所示。图8给出了不同模态下的振型。
4 结语
文章设计了一种单输入多输出式的微夹钳结构,首先对压电微夹钳的各结构进行了设计及材料的选择;对微夹钳的位移放大倍数进行了理论模型构建并求解,然后利用有限元软件对微夹钳的静动态特性进行仿真分析。分析结果表明,所设计的微夹钳可实现在同样位移输入下两种不同的输出位移。通过有限元分析,对比了仿真值与理论值,位移放大倍数与理论值较接近,并对该结构的前6阶固有频率进行了仿真。后续将对设计好的结构进行加工,并装配出压电微夹钳实物,为后续实验测试做准备。
参考文献
[1]BIRKHOLZ M,MAI A,WENGER C,et al.Technology modules from micro-and nano-electronics for the life sciences[J].Wiley Interdisciplinary Reviews Nanomedicine & Nanobiotechnology,2016(8):355-377.
[2]JAVED Y,MANSOOR M,SHAH IA.A review of principles of MEMS pressure sensing with its aerospace applications[J].Sensor Review,2019(39):952-664.
[3]LIANG C,WANG F,SHI B,et al.Design and control of a novel asymmetrical piezoelectric actuated microgripper for micromanipulation[J].Sensors And Actuators A-physical,2018(269):227-237.
[4]WANG Z,SHEN X,CHEN X.Design,modeling,and characterization of a MEMS electrothermal microgripper[J].Microsyst Technol,2015(21):2307-2314.
[5]CHOUDHARY N,KAUR D.Shape memory alloy thin films and heterostructures for MEMS applications:a review[J].Sensors And Actuators A-physical,2016(242):162-181.
[6]ZHANG J,ONAIZAH O,MIDDLETON K,et al.Reliable grasping of three-dimensional untethered mobile magnetic Micro-gripper for autonomous pick-and-place[J].IEEE Robot Autom Lett,2017(2):835-840.
[7]ALOGLA A F,AMALOU F,BALMER C,et al.Micro-tweezers:design,fabrication,simulation and testing of a pneumatically actuated micro-gripper for micromanipulation and microtactile sensing[J].Sensors And Actuators A-physical,2015(236):394-404.
[8]CHEN W.Research on compliant mechanism-based piezoelectric-driven microgripper[M].Guangzhou:South China University of Technology,2017.
[9]王代華,杨群.一种压电致动微夹钳及其开环位移特性[J].纳米技术与精密工程,2010(1):47-53.
[10]崔玉国,郑军辉,马剑强,等.压电自感知微夹钳[J].光学精密工程,2015(7):1996-2004.
[11]荣伟彬,谢晖,王家畴,等.一种集成三维微力传感器的微夹持器研制[J].压电与声光,2007(2):175-178.
(编辑 傅金睿)
Structure design and analysis of piezoelectric micro-clamp with single input and multiple output
Wang Genhua, Zhu Xinyi, Pan Zhongning*, Wen Rui
(Zhejiang Business Technology Institute, Ningbo 315012, China)
Abstract: The structure and displacement output characteristics of the existing piezoelectric micro clamp were analyzed, and a single input and multiple output piezoelectric micro clamp was designed, which has the advantages of simple structure, optional output displacement, small oscillation, and not easy to damage the operating object. The structure of the micro clamp is introduced in detail, and the displacement magnification model is established. ANSYS simulation software was used to analyze the designed micro-clamp, and the simulation results were as follows: after applying 1×10-5mm displacement in the z direction, the tip of the clamp finger could generate 3.2×10-5mm and 5.1×10-5mm displacement respectively. The first 6 orders of natural frequencies are obtained by applying the driving voltage with an interval of 10V. The simulation values have a high agreement with the analytical values, which verifies the feasibility of the structure of the piezoelectric micro-clamp and the correctness of the mathematical model.
Key words: piezoelectric micro clamp; output displacement; ANSYS simulation
