
无人潜航器导航通信桅杆雷达散射特性分析
2023-06-13 09:12:24李强兵刘桂山熊传志
舰船科学技术 2023年9期
李强兵,刘桂山,熊传志
(中国船舶集团有限公司第七一〇研究所,湖北 宜昌 443002)
0 引 言
无人潜航器从20世纪60年代的遥控潜器到无人无缆、具有自主功能的AUV(autonomous underwater vehicle),经历了长足发展[1]。无人潜航器(UUV)可搭载各种传感器和任务载荷,执行特定的使命任务,随着锂电池能源技术、智能控制技术等发展,无人潜航器在海洋环境调查与研究、海底管道与电缆维护、海洋通信中继、水下目标侦察与监视、反水雷、水声对抗、时敏打击等军事和民用领域应用越来越多[2]。相对于潜艇、水面舰艇等有人平台,无人潜航器由于其结构尺寸、材料、推进技术等综合隐身性能优,作为一种海上力量倍增器[3],可以极大地利用隐身性好的优势从而显著提高其生存力和战斗力。
无人潜航器布放入水后战场情况可能瞬息万变,若无人潜航器执行任务期间全程保持通信缄默,仅根据任务计划执行任务,无法体现无人潜航器机动灵活的特点,难以充分发挥无人潜航器的作战效能。无人潜航器执行任务时面临的导航与通信需要主要包括:1)需要定期上浮获取卫星定位信息和授时信号,用于时统和惯性导航装置校准消除导航误差;2)需要定时定点或紧急回传任务信息和自身状态信息,使后方指挥中心及时掌握战场情况和航行器自身运行情况,为其判断决策提供支撑;3)指挥中心需要指挥无人潜航器,变更任务、下达指令或传输情报/战术数据;4 )无人潜航器需要与其他无人潜航器、水面舰艇、潜艇、飞机等移动平台进行协同通信,共同执行作战任务[4]。
目前探测无人潜航器可以分为噪声特性探测、电场特性探测、磁场特性探测、水声目标强度探测、雷达散射特性探测等[5],无人潜航器隐身性能研究主要集中在噪声特性、电场特性、磁场特性、水声目标强度四4个方面,对无人潜航器雷达散射特性相关研究开展较少。随着无人潜航器越来越多用于在无制海权和制空权的防区外执行任务,无人潜航器水面或近水面航行时若被敌反潜飞机探测到的概率和被摧毁概率高于无人潜航器在水中航行,因此应对无人潜航器雷达散射特性隐身性能进行研究与分析。无人潜航器导航通信桅杆是无人潜航器在水面导航通信、漂泊待命等任务阶段唯一浮出水面的结构,其雷达散射特性关系到无人潜航器使用安全性。
1 雷达散射特性分析方法
RCS数值计算方法主要分成频域和时域方法,在工程应用中经常使用物理光学法(physical optics,PO),但物理光学法存在的主要问题是对尖角、棱边、凸起等物体表面计算效果较差,而等效电磁流法可以较好地解决不连续表面RCS的计算问题[6]。因此,本文无人潜航器导航通信桅杆雷达散射特性计算采用物理光学法+等效电磁流法的综合分析方法,通过物理光学法计算导航通信桅杆的一次散射,同时对导航通信桅杆的棱边、尖角等表面采用等效电磁流法计算其电磁散射,最后根据一次散射和电磁散射的相位叠加合成为无人潜航器导航通信桅杆雷达散射截面积RCS。
1.1 物理光学法
物理光学法的主要依据是Stratton-Chu散射场积分方程,该方法在高频场局部性原理的基础上忽略感应电流之间的相互影响,通过入射场单独近似地计算散射体表面感应电流。目前主要采用远场近似和切平面近似这2种近似方法以简化表面感应电流的积分运算,远场近似假设远场观察点与散射体的距离R远远大于该散射体的三维尺度;切平面近似假定散射体表面电流值为积分面元dS处(理想光滑表面)的电流值,因此R CS平方根的物理光学表达式为[7]:
式中:下标i和s分别为入射波和散射波;j为正旋场的复数表示;为电磁波入射方向的单位矢量;为散射方向的单位矢量;为散射体表面的外法向矢量;为电极化方向的单位矢量;为 磁场极化方向的单位矢量;k=2π/λ为自由空间波数,其中λ为波长;r为散射体表面任意面元dS的位置矢量。
复杂散射体表面RCS可以通过散射体面元相位叠加合成得到:
采用三角形小平板近似逼近模拟各种形状的散射体,一个顶点为P1,P2,P3三角形单元的RCS表达式为:
式中:r0取边中点的位置矢量,只要适当地组织实体造型点数据的存储方式,就可以通过式(2)和式(3)很方便地用物理光学法近似计算复杂目标的RCS,并达到可视化计算的目的。
1.2 等效电磁流法
等效电磁流法的基本原理是:在远离散射体的焦散区之外采用PTD计算尖角、棱边、凸起等物体表面的等效电流和等效磁流,而焦散区内的等效电流和等效磁流辐射场可以采用辐射积分计算得出。等效电磁流计算尖角、棱边、凸起等物体表面的散射特性表达式为[8]:
式中:t为强制边缘单位矢量方向;θ为入射线i与强制边缘单位矢量方向t的夹角,其他参数见文献[9]。
2 通信导航桅杆计算模型
某型无人潜航器导航通信桅杆上部结构为纤维增强塑料,下部分为不锈钢金属材料,内部电气设备材料主要为增强尼龙、树脂、增强材料以及绝缘基板,尾部为电缆。纤维增强塑料、增强尼龙、树脂、增强材料以及绝缘基板、电缆等材料具有很强的透波性不反射雷达波,因此在进行仿真计算时主要考虑导航通信桅杆下半部份不锈钢金属材料的雷达散射特性,其计算模型如图1所示。
图1 导航通信桅杆结构示意图及计算模型Fig.1 Navigation communication mast structure and calculation model view
3 RCS仿真评估
3.1 仿真模型
该型无人潜航器在近水面进行导航与通信时导航通信桅杆浮出水面约0.5 m,导航通信桅杆不锈钢金属外部分处于海面下,因此计算时将导航通信桅杆外表面设置为海水介质的电磁参数:εr=81,µr=1,σ=4S/m,采用电磁场仿真软件FEKO计算导航通信桅杆RCS,导航通信桅杆内表面设置为理想金属材料。
导航通信桅杆为对称结构,进行RCS计算时考虑雷达波入射角θ=0°−90°的情况即可,导航通信桅杆在FEKO中的模型如图2所示。

图2 导航通信桅杆仿真模型Fig.2 Sea surface parameter setting and simulation model of navigation communication mast
3.2 计算内容
表1给出了导航通信桅杆的计算内容,包含5个波段的RCS计算。

表1 计算内容Tab.1 Calculate content
1)L波段雷达入射时的RCS情况
导航通信桅杆在L波段(1.5 GHz)下的RCS仿真结果如图3所示。L波段下,导航通信桅杆RCS值在雷达波垂向沿Z轴入射时最大,最大值为0.24 m2。
图3 L波段下的RCS情况Fig.3 RCS situation of navigation communication mast in L-band
2)S波段雷达入射时的RCS情况
导航通信桅杆在S波段(3 GHz)下的RCS仿真结果如图4所示。S波段下,导航通信桅杆RCS值在雷达波垂向沿Z轴入射时最大,最大值为1.3 m2。
图4 S波段下的RCS情况Fig.4 RCS situation of navigation communication mast in S-band
3)C波段雷达入射时的RCS情况
导航通信桅杆在C波段(6 GHz)下的RCS仿真结果如图5所示。C波段下,导航通信桅杆RCS值在雷达波垂向沿Z轴入射时最大,最大值为2.2 m2。
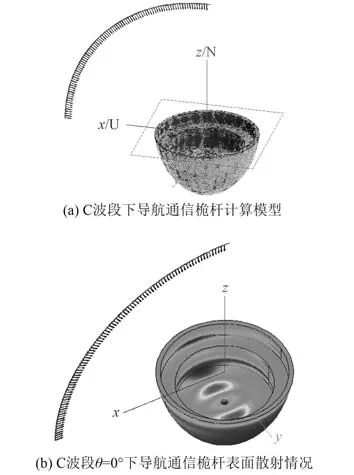
图5 C波段下的RCS情况Fig.5 RCS situation of navigation communication mast in C-band
4)X波段雷达入射时的RCS情况
导航通信桅杆在X波段(10 GHz)下的RCS仿真结果如图6所示。X波段下,导航通信桅杆RCS值在雷达波垂向沿Z轴入射时最大,最大值为9.2 m2。
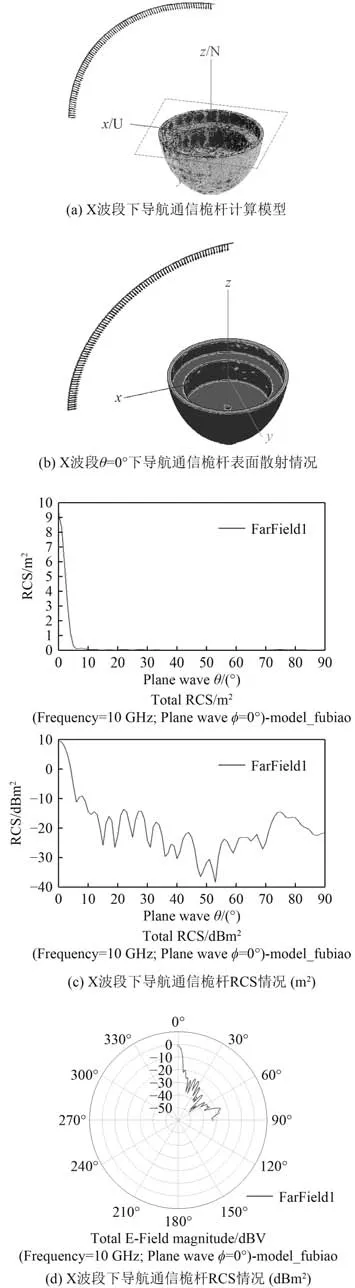
图6 X波段下的RCS情况Fig.6 RCS situation of navigation communication mast in X-band
5)Ku波段雷达入射时的RCS情况
导航通信桅杆在Ku波段(15 GHz)下的RCS仿真结果如图7所示。C波段下,导航通信桅杆RCS值在雷达波垂向沿Z轴入射时最大,最大值为4.6 m2。
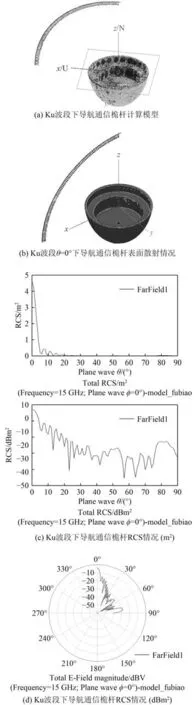
图7 Ku波段下的RCS情况Fig.7 RCS situation of navigation communication mast in Ku-band
根据仿真结果,将RCS值导出处理,结果统计如表2和图8所示。

表2 导航通信桅杆各波段雷达散射特性仿真计算值(m2)Tab.2 The RCS value of the navigation communication mast in each frequency band (m2)
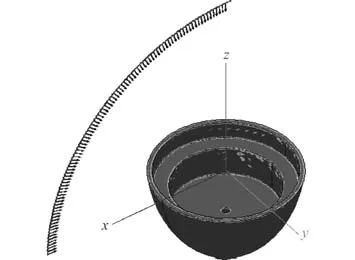
图8 导航通信桅杆表面RCS情况Fig.8 RCS situation on the surface of the navigation communication mast
3.3 强散射源分析
导航通信桅杆的强散射源与雷达波方位有关,RCS曲线在图3~图7中可以明显看出峰值方位,强散射源主要在该型无人潜航器导航通信桅杆垂向于Z轴的内表面。
4 结 语
1)本文采用物理光学法和等效电磁流法结合的方法,对无人潜航器导航通信桅杆的雷达散射特性进行分析与研究,通过建立仿真模型进行L波段、S波段、C波段、X波段、Ku波段等5个波段雷达散射特性计算,5个波段下RCS峰值分别为:0.24,1.3,2.2,9.2,4.6,均值分别为0.13,0.15,0.2,0.3,0.2,5个波段下RCS总均值为0.21。
2)根据强散射源分析,强散射源主要集中在该型无人潜航器导航通信桅杆垂向于Z轴的金属内表面,后续设计中RCS优化应考虑尽可能缩小导航通信桅杆内表面垂向表面垂向于Z轴的大平面。
猜你喜欢
数理化解题研究(2022年24期)2022-08-31 00:59:40
电讯技术(2022年1期)2022-02-12 05:16:12
阅读时代(2021年6期)2021-09-10 07:22:44
东方少年·快乐文学(2020年8期)2020-10-20 06:20:11
无损检测(2019年11期)2019-11-20 07:07:50
石油地球物理勘探(2017年2期)2017-11-23 06:01:26
教育教学论坛(2017年6期)2017-03-04 21:43:43
教育教学论坛(2017年1期)2017-02-08 21:04:40
教育教学论坛(2016年46期)2016-12-19 20:26:52
城市勘测(2016年2期)2016-08-16 05:58:24
