点阵式LED智能前照灯控制功能算法研究*
2023-05-23 10:29:10高金武王向阳贾志桓付河梁宝雯
汽车技术 2023年5期
高金武 王向阳 贾志桓 付河 梁宝雯
(1.吉林大学,长春 130022;2.广州广日电气设备有限公司,广州 510000)
主题词:点阵式LED 远光灯 照明光场变换 路面投影 车外交互
1 前言
近年来,汽车保有量逐年递增,交通出行环境日益复杂。据交管部门统计,一半以上的交通事故发生在夜间[1]。目前单一工作模式的汽车前照灯系统已不能满足需求,因此智能车灯照明系统对汽车智能化和安全驾驶都具有重要意义。
目前,智能车灯控制系统主要分为随动式前照灯控制系统和矩阵式前照灯分区控制系统。随动式前照灯控制系统具有结构简单、算法实现简便等优点,但只能实现基本照明光场的整体水平或垂直方向偏移,当对向有来车或行人时,无法兼顾安全驾驶的照明需求和对向来车驾驶员及行人的防眩目需求[2-4]。部分学者在此基础上进行了硬件、软件升级及算法优化,使系统模型具有较好的精度,大幅减小了系统超调,延长了前照灯的使用寿命,提高了智能前照灯系统的精度[5-6]。矩阵式前照灯分区控制系统的优点在于多颗LED灯珠按照矩阵的方式排列成行或列,每颗LED灯珠由独立的芯片控制,多颗单独可控。但受LED灯珠尺寸的限制,且随着LED灯珠数量的增加,二次光学系统与其之间的校准难度也会增加,未来像素升级的空间有限[7-8]。此外,针对前照明光场调整控制复杂的特点,有学者提出了固定照明模式和照明灯具模式化的方法,但该控制方式较为单一,可变范围有限,不能很好地适应复杂的交通环境[9-10]。
针对以上问题,越来越多的汽车生产企业开始采用LED 智能前照灯[11-12]。然而,LED 智能前照灯的控制技术对我国仍处于未公开的阶段。
为此,本文对基于点阵式LED 远光灯照明的实现机制进行研究,对点阵式LED 远光灯的物理特征及其照明光场的变换需求进行分析,确定点阵式LED 远光灯的点亮状况与汽车前照灯照明光场的映射关系,并通过试验对其控制效果加以验证。
2 点阵式LED远光灯的照明需求及其特性分析
2.1 LED前照灯的控制策略设计
本文着眼于建立点阵式LED 远光灯与地面照明区域的映射关系,实现对汽车前照灯照明光场的变换。点阵式LED远光灯的照明过程如图1 所示。在车灯离地高度和偏转角度一定的情况下,点阵式LED 发光阵列E在地面上的映射照明范围见图1a 中的梯形ABCD区域,在此基础上,根据车辆配备的各种传感器(速度传感器、俯仰传感器等),以及结合高级驾驶辅助系统(Advanced Driving Assistance System,ADAS)提供的周围环境信息,明确前照灯的照明需求,在梯形ABCD区域的基础上,对照明区域进行分割细化,实现夜间驾驶的照明需求(高速、城市、乡村、交叉路口等照明模式),见图1b,最终输出照明效果见图1c。
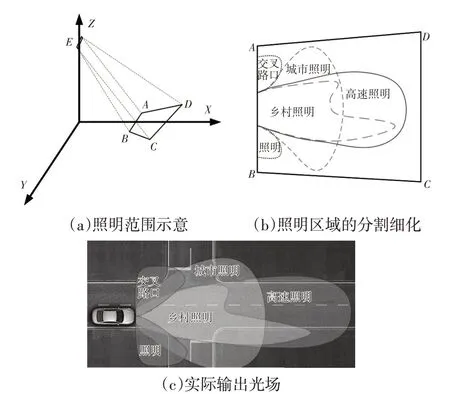
图1 点阵式LED智能前照灯光场调整示意
本文的关键在于如何将期望的照明需求转化为点阵式LED远光灯中每个LED灯珠的控制命令。即通过求取前照灯控制输入与照明光场的映射关系,再依据前照灯照明需求,确定需要点亮的LED阵列的坐标位置,实现对汽车前照灯照明光场的精确控制。
2.2 LED前照灯特性分析
汽车前照灯以非成像光学为理论基础,利用反光杯、透镜等光学器件的特性和光学原理对前照灯光源发出的光线进行二次光学设计,在目标平面上形成特定的光线分布。发光阵列P经透镜组输出的实际光路如图2a所示。
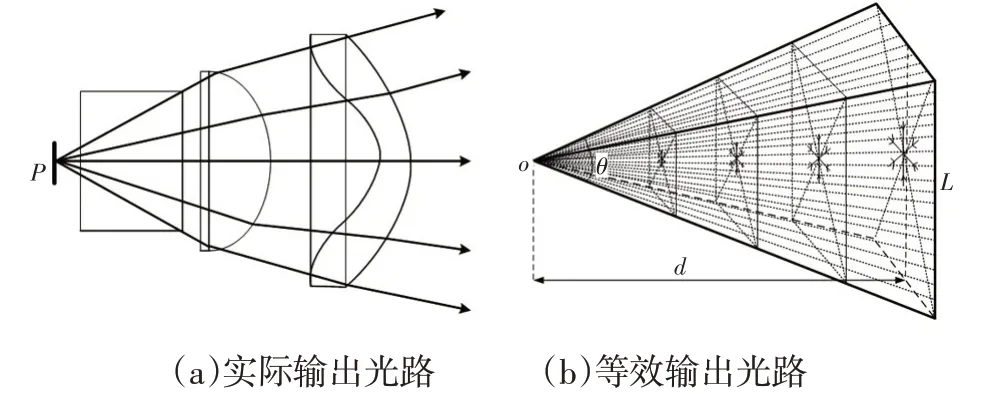
图2 车灯光场输出光路示意
无论汽车前照灯内部的光学系统如何复杂,对前照灯所需要的照明效果而言,只关心其最后输出的照明光场。将图2a等效为如图2b所示的点光源o,其输出的照明光场是线性放大的过程。
为了描述图2b的等效输出光场,需获取点光源o输出光场的出射角θ及与点光源o的距离为d时对应输出光场区域的边长L,见图2b。且d与L的关系为:
式中,K为边长L随距离d变化的放大系数。
根据式(1),再结合图2b 的等效输出光场,依据几何关系得到θ、d及对应L的关系,进而求得出射角θ:
3 点阵式LED远光灯控制功能算法
3.1 映射关系的建立
点阵式LED 远光灯控制系统需要灵活精准地调整照明光场,实时动态地满足驾驶员夜间驾驶照明需求。其关键在于,确定发光阵列中每个像素点在地面上的映射地址。
本文研究的点阵式远光灯的简要照明光场如图3所示,其中,h、β分别为前照灯光源的离地高度和向下偏转的角度。
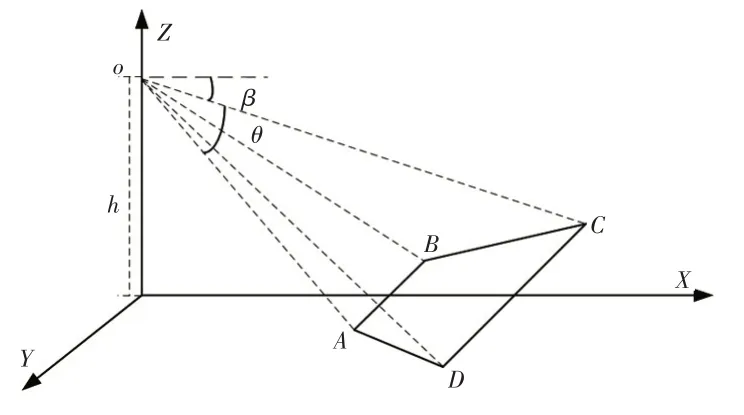
图3 点阵式LED远光灯的照明光场示意
考虑图3 中的点阵式LED 远光灯控制系统是以离地一定高度和偏转角度投射到地面上,结合式(1)可知投射到地面的光场为等腰梯形,映射过程如图4所示。
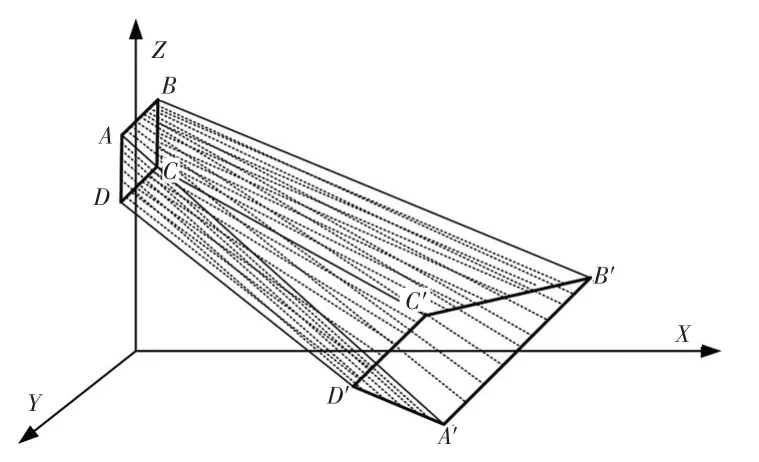
图4 LED发光阵列映射到地面的过程示意
设点阵式LED远光灯控制系统的LED发光阵列为M行、N列的矩形,即含有数量为M×N的LED 发光点。将其按先行展开,再列展开的方法和步骤确定LED 发光阵列中每个像素点与地面照明区域的映射关系。
按行展开时,考虑到LED发光阵列为M行,将出射角θ均分为(M-1)份,如图5所示。

图5 空间直角坐标系下M行对应的x坐标
则各行在地面的坐标值xi,i∈[0,M-1]表示为:
接着,再将其按列展开,如图6 所示。求取xi,i∈[0,M-1]坐标值处的照明宽度Li,i∈[0,M-1],Li随与车灯点光源距离di,i∈[0,M-1]的大小按一定的规律变化,可表示为:
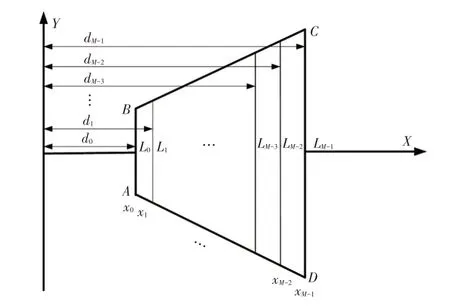
图6 xi坐标位置处的照明宽度Li随距离di的变化
式中,n2∈[0,(M-2)∕2+k]为整数。
将di代入式(1),得到对应的光段宽度Li为:
此时xi对应的Yi坐标值为:
式中,n3∈[0,N-1]为整数。
至此,点阵式LED 发光阵列中每一个像素点与地面照明区域的映射关系已确定。
3.2 照明实现
结合上述算法,可以建立LED 发光阵列中任一发光点(x,y)与地面照明区域中的位置地址(X,Y)的映射关系。首先,将其按行展开,结合式(3)确定第x行在地面映射照明区域中的位置坐标X,再结合式(4)和式(5)得到地面照明区域中第X行处对应输出光场的照明宽度L。最后,结合式(6)可以得出发光点(x,y)在地面第X行处对应的Y坐标值。同理,亦可通过上述算法反求出地面照明区域中任一位置在LED发光阵列中的映射发光点。
4 试验验证及分析
4.1 试验系统搭建
本文搭建的试验系统硬件实物如图7所示,主要包括集成高分辨率LED 光源(EVIYOS)、LRS-350W 开关电源、USBCAN II FD调试分析仪、计算机。
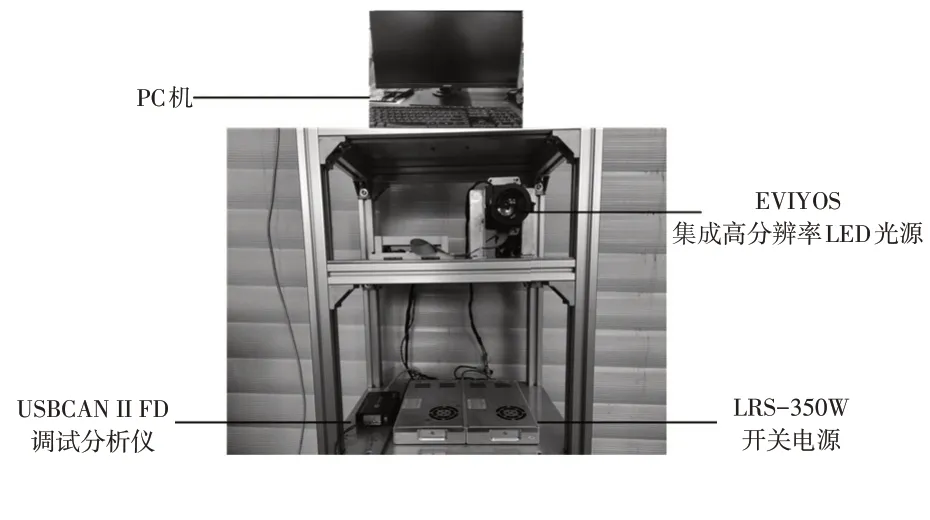
图7 试验台架系统结构示意
首先,LRS-350W 开关电源将220 V 交流电转化为24 V 和12 V 直流电分别为集成高分辨率LED 光源和USBCAN II FD 调试分析仪供电,并计算机中将车载传感器获取到的路况信息结合ADAS 对信号进行综合分析和评价,确定夜间驾驶的照明需求。然后,结合式(3)~式(6),确定LED发光阵列在地面上的映射照明区域,然后动态调整照明光场,输出满足夜间驾驶照明需求的光场;USBCAN II FD 调试分析仪将计算机产生的光场照明需求以CAN 信号的形式传送至车灯控制端;集成高分辨率LED光源输出照明光场。
本文试验中选取的LED 点阵式发光阵列为欧司朗,它包括1 个EVIYOS 芯片和3 个透镜组成的透镜组。每个EVIYOS 芯片有1 024 个独立的可寻址芯片,共有1 024(32×32)个像素点,如图8所示。它是一款可配置的多像素光源,由微结构自适应前照明光场系统智能硅衬板组成,为高分辨率有源矩阵LED 阵列。采用表面组装技术(Surface Mount Technology,SMT),无机械活动部件,输出光场的调整依靠LED 像素阵列的开关完成。
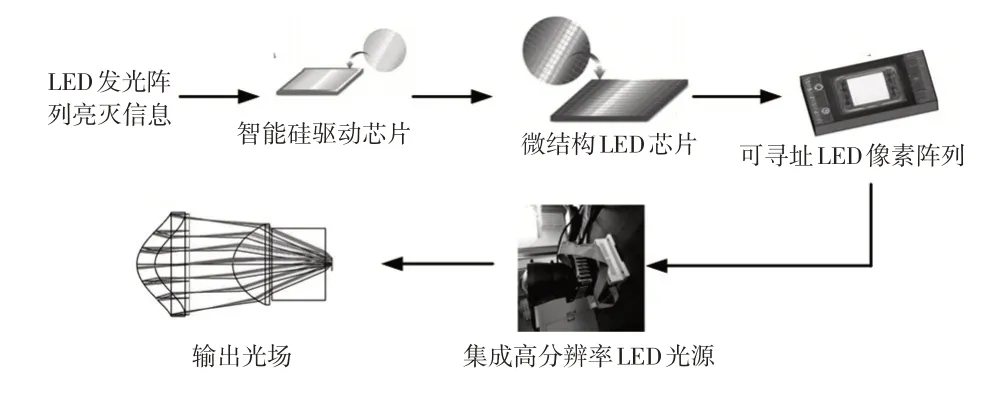
图8 车灯结构示意
4.2 系统参数辨识
本文试验台架离地高度h=76 cm,车灯向下偏转角度β=π∕12,基于此,求取LED 照明阵列在地面的映射照明区域。
首先,采集试验台架与车灯发光源的距离d,以及对应输出光场区域边长L的数据,对上述数据进行处理,并借助MATLAB数学工具进行数据拟合,求取边长L随距离d的放大系数k,如图9所示,拟合后数学关系为:
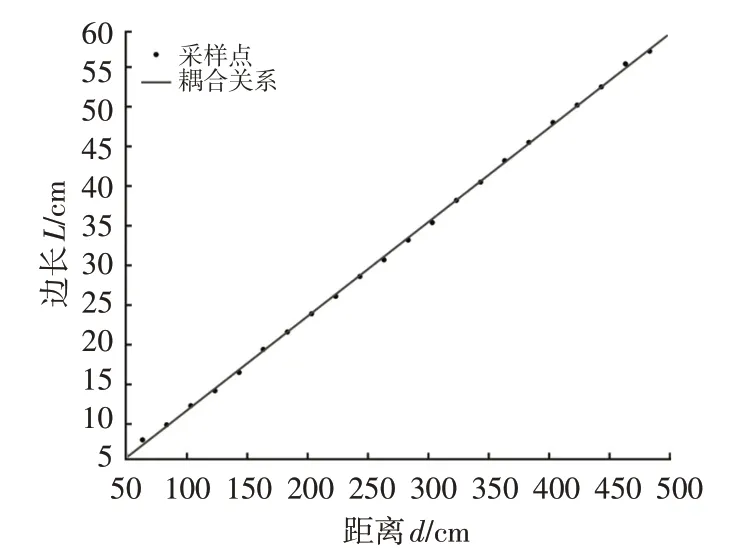
图9 数据拟合的函数图像
基于式(1),考虑到实际工程测量中的误差,分析得出式(7)中的-0.166 7 为测量过程产生的误差扰动量,将误差扰动量消除后得到对应的映射关系表达式为:
式中,L为对应输出光场区域边长;d为距车灯发光源的距离。
再结合式(2)和式(3)可以求解出LED 发光阵列的出射角θ:
4.3 点阵式LED远光灯控制策略的实现及仿真研究
4.3.1 点阵式LED远光灯控制策略
首先对试验台架进行系统参数辨识,求取车灯照明区域随距离的放大倍数。然后由车灯所在的实际高度和偏转角度,结合本文的点阵式控制算法,确定点阵式LED远光灯的点亮状况与照明光场的映射关系。最后,在试验环境下搭建相应的试验系统,在计算机中基于VC++建立上位机界面,依据映射关系对集成高分辨率LED 光源(EVIYOS)中LED 灯珠的亮灭状况进行控制,借助USBCAN II FD 调试分析仪,将计算机产生的控制命令以CAN 信号的形式传送至车灯控制端;LED 光源(EVIYOS)输出照明光场。所提出的控制策略流程如图10所示。
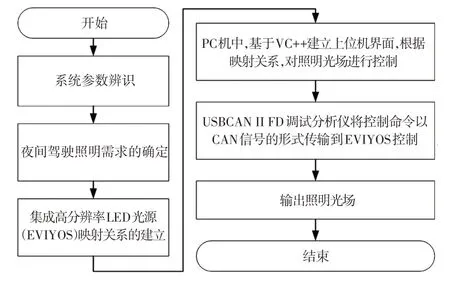
图10 点阵式LED远光灯控制策略流程
4.3.2 仿真研究
选用MATLAB 作为仿真工具,编写M文件,将本文算法转换成对应的代码进行仿真。
将点阵式LED 远光灯控制算法确定的照明区域中的发光点打印输出,并进行简单的光场变换,输出斑马线和数字-3,输出的仿真结果如图11、图12所示。
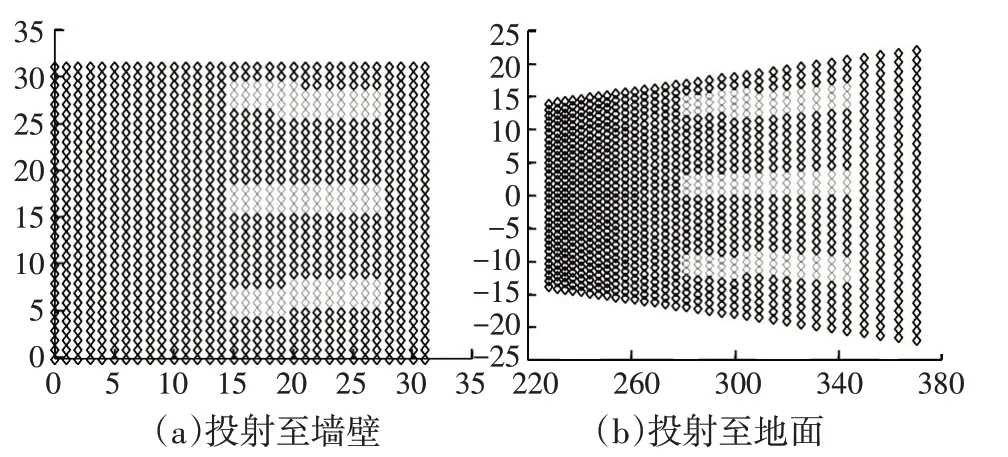
图11 斑马线的输出仿真效果
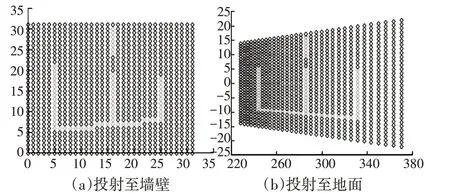
图12 数字的输出仿真效果
如图11a 和图12a 所示,投影至墙壁上的光场具有非线性畸变的特点,而通过本文的控制算法输出控制命令至控制器,投影输出至地面的光场如图11b 和图12b所示,该仿真结果验证了控制算法的有效性。
4.4 验证结果分析
在上述试验环境下,采用本文控制算法,分别针对不同情况下的点阵式LED 远光灯进行测试:包括路面投射高清警告∕交互标志(斑马线、驾驶舱内温度)、照明光场的调整和防眩目交通场景的应用验证。
4.4.1 路面投影交通警告∕交互标志
针对夜间车辆行驶经过无交通灯路口,需礼让行人的情况,在路面投射出斑马线,已知LED发光阵列离地高度h和偏转角度β的情况下,计算获得的斑马线输出效果如图13所示。
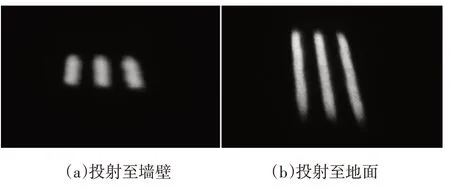
图13 投射斑马线输出仿真效果
由图13a可知,垂直投射到墙壁时图像存在一定畸变,短且倾斜;由图13b 可知,投射到地面时,图像线性度较好,无明显失真和畸变现象。
针对车前照明光场的灵活调整,投射出简单的数字,计算获得的数字输出效果如图14所示。
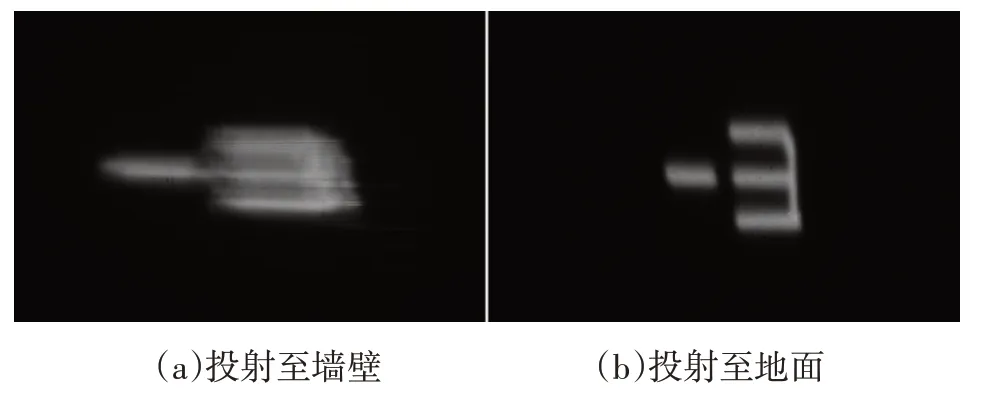
图14 投射简单数字输出仿真效果
由图14 可知,投射到地面的效果图无明显失真和畸变现象。
4.4.2 照明光场的调整和防眩目交通场景的应用验证
针对当前车辆夜间照明形式单一,行驶过程中远光灯产生炫目,易引发交通事故的情况。计算机模拟ADAS 系统,感知周围环境,获取对向行人和驾驶员的位置信息,再由计算机按照上述控制算法动态调整照明光场,输出满足夜间驾驶照明需求的光场,并通过USBCAN II FD调试分析仪将光场照明需求以CAN信号的形式传送至车灯。用镜子代表夜间驾驶时对向行人及驾驶员面部所在位置,试验结果如图15 所示。由图15可知,夜间光场调整后,处于对向行人及驾驶员面部位置的灯光被消除掉,表明采用本文的控制方法能够使对向行人和驾驶员避免直接面部照射,实现了防炫目的需求。
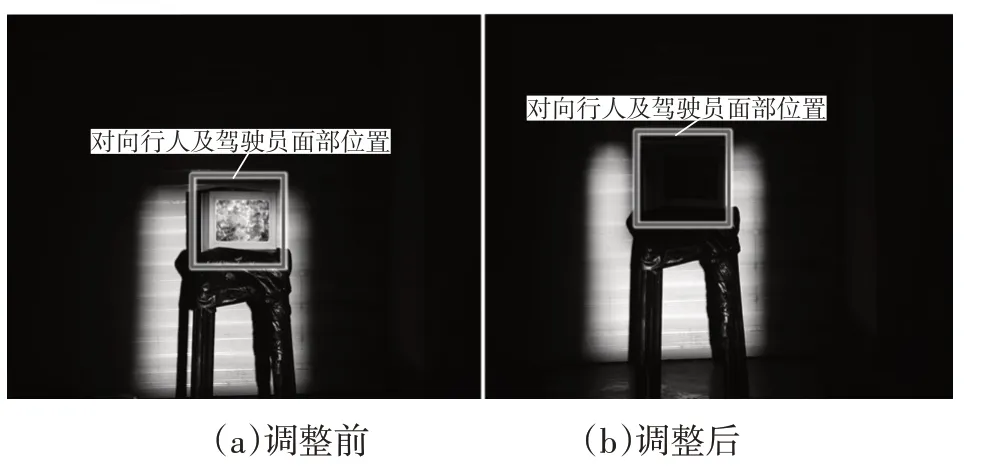
图15 防眩目光场调整示意
在上述防眩目交通场景的应用的基础上,实时动态调整照明光场,输出规则图形,如图16所示。
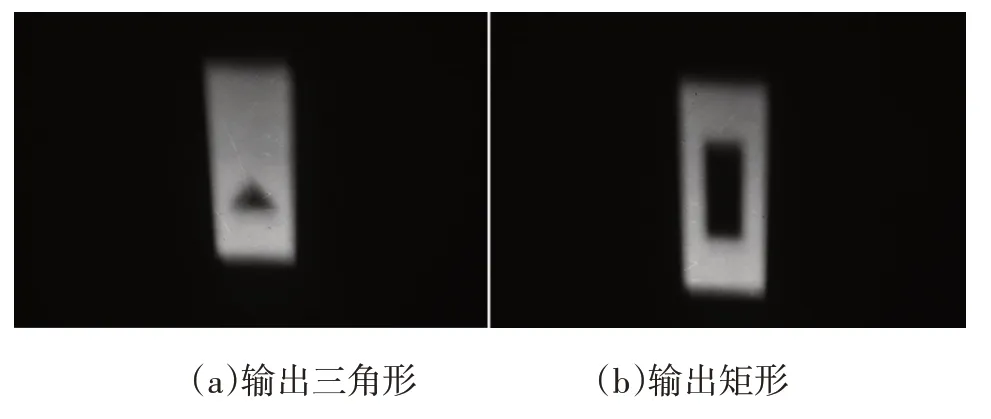
图16 车前光场调整示意
由图16 可知,本文的控制算法可以实时动态调整车前照明光场,进一步实现防炫目的需求。
5 结语
本文针对点阵式LED 远光灯,提出了基于不同路况和周围环境的点阵式LED 远光灯像素级控制策略,在保证点阵式LED 远光灯正常照明的前提下,通过对输出光场进行调整与控制,实现了在路面上投射常见的高清警告∕交互标志,并对防眩目交通场景进行应用验证。结果表明,该算法可精确调整车前照明光场,提高了夜间驾驶的安全性,改善了夜间驾驶的环境舒适度。
猜你喜欢
装备制造技术(2021年1期)2021-05-21 07:55:10
科学(2020年5期)2020-01-05 07:03:12
汽车维护与修理(2018年7期)2018-10-13 06:03:48
常州工学院学报(2017年3期)2017-09-16 03:48:25
汽车维护与修理(2016年4期)2016-11-26 06:29:50
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:10
汽车零部件(2014年7期)2014-06-23 16:26:07
摄影之友(2014年3期)2014-04-21 20:21:38
汽车电器(2014年8期)2014-02-28 12:14:29
汽车电器(2014年8期)2014-02-28 12:14:27