
基于人体红外传感器的大型车辆盲区预警系统设计
2023-05-23 12:57陈岚赵竹吴欢刘霁霆曾浩然
无线互联科技 2023年6期
陈岚 赵竹 吴欢 刘霁霆 曾浩然
作者简介:陈岚(1983— ),女,湖南长沙人,讲师,硕士;研究方向:智能交通,交通控制,交通工程。
*通信作者:赵竹(1981— ),男,湖南长沙人,副教授,硕士;研究方向:智能交通,网络通信,视频监控。
摘要:大型车辆由于车身长、轴距长等特点,导致其在行驶过程中存在严重的视觉盲区。车身越长,转弯形成的内轮差就越大,盲区也就越大,因此给行车安全带来巨大的隐患。文章设计了一套低成本盲区预警系统,采用三级混合报警系统,将人体红外传感器、语音报警器、地面投影器、声光报警器融合,实现多方位盲区检测,达到“车避人”+“人避车”的效果,很好地解决盲区问题,大幅提高驾驶的安全性。
关键词:大型车辆盲区;三级混合报警系统;行人检测
中图分类号:TP929 文献标志码:A
0 引言
随着中国货运行业的发展,货运车辆大型化趋势非常明显,因车辆盲区引发的事故数不胜数,特别是雨雾天、夜晚、右转弯等视野欠缺情况下,给行车安全造成极大隐患。因此,设计一种大型车辆的盲区监测系统对提示交通安全具有重要意义。现有盲区检测系统均采用“车避人”方式防止盲区交通事故,且存在一定技术缺陷。本文提出的大型车辆盲区预警系统采用“车避人”+“人避车”原理,可以较好地解决这个问题。
1 车辆盲区问题分析
据《2020年交通运输行业发展统计公报》统计,2020年全国大型车辆拥有量达到2 281.79万辆[1]。大型车辆所导致的交通事故也在逐年增加,在涉及车辆发生的恶性交通事故中,盲区引发的事故高达70%,致死率超过90%[2]。分析可知,事故原因主要有 :大车司机的视线存在盲区导致其未能及时发现盲区内的非机动车、行人;非机动车及行人对大型车辆右转盲区范围判断有误造成的误入;大型车司机驾车过程中的车速过快及疏忽大意问题。
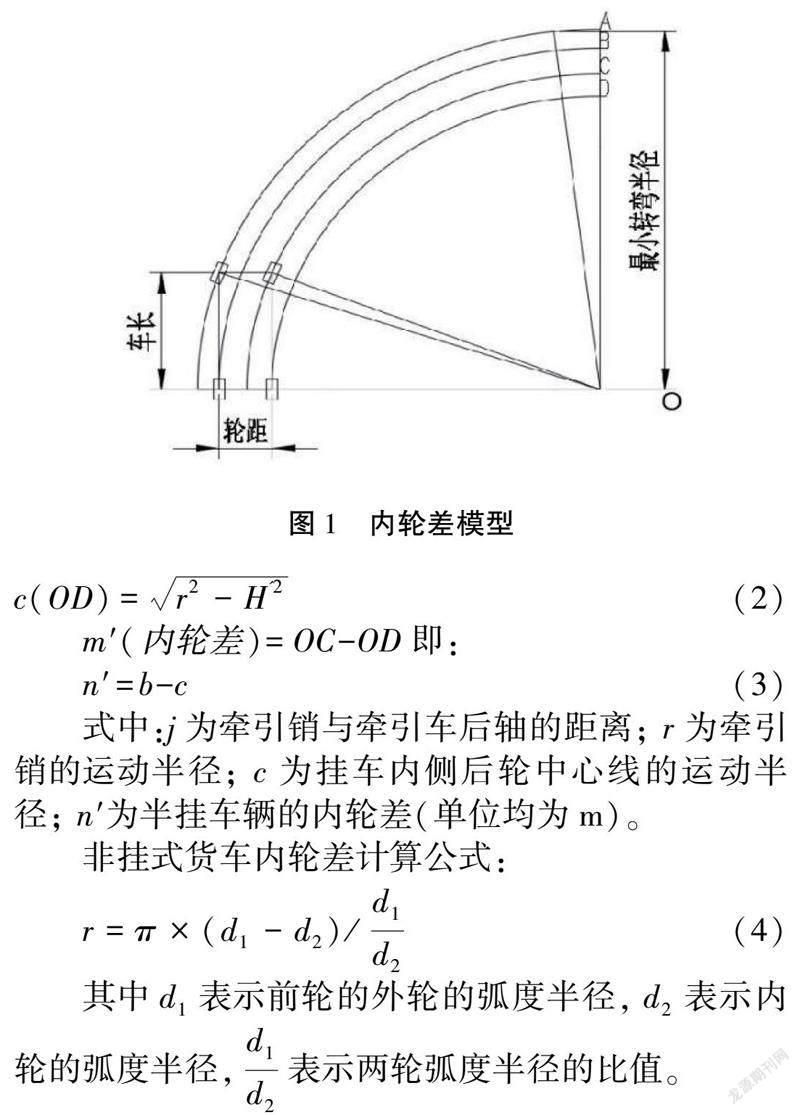
大型车辆在右转弯时产生的内轮差导致巨大的视觉盲区。内轮差是在车辆转弯过程中前后内轮转弯半径的差值,与车长、轮距、最小转弯半径3个因素有关[3]。根据内轮差模型(见图1),A、B、C、D为4个轮的行驶轨迹。
半挂式货车内轮差的计算推导:
abo为直角三角形,oa为车辆最小转弯半径,ab=cd为轴距,根据勾股定理可得:
c和d与o点形成直角三角形,勾股定理得出OD的数据。即:
式中:j为牵引销与牵引车后轴的距离; r为牵引销的运动半径; c为挂车内侧后轮中心线的运动半径; n′为半挂车辆的内轮差(单位均为m)。
非挂式货车内轮差计算公式:
其中d1表示前轮的外轮的弧度半径,d2表示内轮的弧度半径,d1d2表示两轮弧度半径的比值。
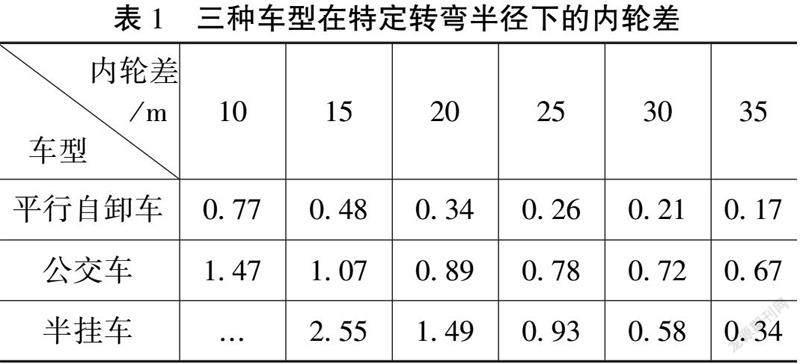
以重型货车、公交车和半挂汽车列车为例,分别计算沿特定半径道路中心线转弯时产生的内轮差。其中车型分别选取一汽平头柴油自卸汽车CA3071P9K2AE、宇通公交车ZK6891HG和一汽半挂牵引车CA4260P66K2T1A作为代表。计算后的内轮差范围大小如表1所示。
根据以上结果 ,半挂车的宽度为2.5 m,车道宽度为3.5 m,当半挂车沿着25 m半径圆弧转弯时,所产生的内轮差极易侵入内侧的车道,而行人与非机动车很难准确判断自身是否进入大型车右转盲区。
对此交警部门做出很多处理方式,如针对右转内轮差盲区提出的右转必停标志、右转危险区域提示、雷视一体机路口监测等。这些措施能够一定程度上减少事故发生,但都存在一定的缺陷。
“右转必停标志”是交警部门针对盲区问题做出的相关法规[4],要求所有大型车辆驾驶员右转必停,即车辆在路口右转或者行经右转渠化匝道时,自觉停到两米线外进行观望,在满足道路安全情况下,才能进行右转通行。这让大型车辆因右转弯导致的事故大幅下降。但其背后也有缺点,如不断启停会增加油耗、驾驶员不可能同时进行前、左、右盲区的观察、停车后不能避免还会有人进入盲区。
“右转危险区域提示”使用红色油漆将内轮差盲区漆红,变成一个醒目的区域警示非机动车和行人,达到自觉避开“右转危险区”的效果。同时也存在一定的缺陷,如无法避免行人、非机动车不守交通规则,驾驶员在危险区域前没有停车眺望直接驶过等危险。
除此之外,市面上还有针对盲区研发的技术解决方案,常见的有雷达、360°车辆全景影视、渣土车主动刹车系统等,也都存在一定缺陷。
雷达:探测声波存在太窄的现象,障碍物一旦偏离雷达探头的正对角度时,多数存在较大的探测盲区,对管状、锥状等特殊障碍物存在较多的死角。因车辆行驶过程中的环境十分复杂以及各种极端天气的影响,导致雷达对障碍物的识别存在一定的误差概率。
智能车载360度全景环视系统:通过视频监控提醒大型车辆驾驶人注意避开行人,而大型车辆驾驶人有时不会及时地注意观察监控屏,所以解决盲区的能力较弱。
渣土车盲区主动刹车系统:只有在车速15 km/h以下才會自动触发。
以上大货车盲区问题的方式都是从驾驶员的方面去考虑,以达到“车避人”效果。目前,针对进入盲区的非机动车、行人主动提醒等方面还处于技术空缺阶段。
2 系统设计
本文提出的系统是专门针对大型车辆盲区以及内轮差这一危险地带的解决方案,系统的检测单元与警示单元通过信息传播媒介(微处理器)进行信息交换和通信,以实现检测与报警功能。主要核心部件为人体红外传感器、语音报警器、声光报警器、地面投影器。STM32单片机运行三级混合报警系统做出决策,当行人进入设定的预警区域时,触发三级混合报警系统对行人以及驾驶员进行预警。报警单元内的地面投影仪、声光报警器以及语音播报器可以单独使用,也可以混合报警,既可以自动调试,也可以手动操作。达到“车避人”+“人避车”的效果。
2.1 设备选取及安装
2.1.1 人体红外传感器安装
大型车辆因A柱及车身遮挡产生多个盲区,为解决这些盲区问题,布置2颗人体红外传感器于车前保险杠后。针对转弯盲区,布置2颗人体红外传感器于驾驶舱间横梁处。人体红外传感器最远的探测距离约为12 m,探测角度为锥角120°~180°可调。通过4颗人体红外传感器覆盖车身,达到监测目的,如图2所示。安装过程采用卡接式,探头部位朝外。具体传感器数量依据盲区大小进行配置。
2.1.2 地面投影仪安装
大货车的内轮差通常可达1.5~2 m,投影仪投射距离约为6 m。经过大量测试,采用钝角三角形的投射方式,将投影器安装至内轮差的头部(前转向轮附近),离地0.8~1.2 m,安装角度与车身成15°夹角斜向下,达到警示盲区效果。
2.1.3 语音播报器安装
距离每增加1倍时,声压会减少6 dB。通过测试,语音播报器的分贝为120 dB,街道环境声音为70 dB左右,因此在内轮差盲区的起点,高度为1.8 m处安装语音播报器可以更好使警报传播到人耳。
2.1.4 声光报警器安装
为引起非机动车、行人注意,警报器通过安装至车顶处。在紧急情况下发出警报声,不断闪烁强光,提醒盲区内的非机动车、行人迅速退出盲区,避免事故发生。
2.1.5 微处理单元安装
微处理单元是本系统最重要的部件,为避免暴晒、潮湿等危害,须进行特殊的安装保护,安装在驾驶室中控台内,根据情况找到固定点,并固定牢固。
2.2 系统功能分析
2.2.1 监测系统
监测系统由人体红外传感器负责[5]。通过红外传感器的探头探测人体体温恒定所释放的红外线,人体红外传感器所连接的电路通过对电荷进行检测就能识别是否有人在此区域,从而达到探测盲区的效果。
2.2.2 报警系统
当监测单元感应到车辆盲区内有人,则将信息传输至微处理单元。微处理单元经过对监测单元信息的采集及处理,进而发送指令控制警示单元中的声光报警器、语音报警器和地面投影器进行大型车辆盲区预警提示。具体工作方式为:地面投影器投影出车辆盲区的范围,并标注字体“车辆盲区,请注意避让!”;声光报警器进行红、绿、蓝灯光的交替闪烁,声光报警器结合语音警报器,在车内外进行灯光交替闪烁的同时发出蜂鸣声警示周围非机动车与行人。
2.2.3 决策系统
决策系统由三级混合报警系统进行判断。将语音报警器、声光报警器、地面投影器,结合多传感融合技术进行处理。进行大量实验,结合报警器可调节功能设计的三级报警方案,分别对应的音量分贝、报警频率均不相同,如图3所示。
通过监测系统、报警系统、决策系统三大系统结合对大型车辆盲区进行实时保护,达到“车避人”+“人避车”双重保障效果。
3 结语
本文提出的大型車辆智能盲区预警系统利用人体红外传感器、语音报警器、声光报警器、地面投影器高灵敏度传感器组合,实现多方位盲区检测,达到“人避车”+“车避人”效果。通过产品的测试以及逐步投入市场,使用效果证明该系统具有可靠性强、成本低的优势,适用于各类大型车辆,可以很好地解决大型车辆的盲区安全问题。
参考文献
[1]交通运输部.2020年交通运输行业发展统计公报[J].交通财会,2021(6):92-97.
[2]刘启明.基于车辆碰撞事故反求的脑损伤评价研究[D].长沙:湖南大学,2018.
[3]徐令选.大型车右转盲区形成机理及防治措施研究[D].天津:河北工业大学,2017.
[4]交宣.创新管理措施防范大货车右转盲区致祸[J].道路交通管理,2021(10):14-16.
[5]周湘峻.热释电人体红外传感器及其应用[J].电子技术应用,1994(4):45-46.
(编辑 傅金睿)
Abstract: Large vehicles due to the long body, wheelbase and other characteristics, resulting in serious visual blind spots in the driving process. The longer the vehicle body is, the larger the inner wheel difference formed by turning, and the larger the blind spot is, thus posing a huge hidden danger to driving safety. This paper designs a low-cost blind zone warning system, using a three-stage hybrid alarm system, integrating human infrared sensors, voice alarms, ground projectors, and audio and visual alarms to achieve multi-directional blind zone detection, achieving the effect of “car avoiding people” + “people avoiding cars”. Effect, a good solution to the blind spot problem, significantly improve the safety of driving.
Key words: blind zone of large vehicles; three-level hybrid alarm system; pedestrian detection
