基于多源数据融合的油气联合站风险预警研究
2023-05-18 13:14陈文青董绍华刘洪艳
武汉理工大学学报(信息与管理工程版) 2023年2期
陈文青,董绍华,刘洪艳,张 行
(1.中国石油大学(北京)安全与海洋工程学院,北京 102249;2.中国石油大学(北京)应急管理部油气生产安全与应急技术重点实验室,北京 102249;3.中国石油吉林油田分公司新木采油厂,吉林 松原 138000)
随着联合站处理规模的不断增长,联合站开始将物联网技术应用于联合站的生产运行监管系统之中[1]。监控系统需要布置大量的传感器以实现生产工艺参数和设备状态的监控,传感器的故障或错误可能会导致监控预警系统中假报警的泛滥[2]。近年来,联合站风险预警方面的研究主要侧重于特定设备设施异常工况诊断[3]和特定设备失效概率分析[4]。常用的风险评价方法有风险评价矩阵法、结构重要度、模糊综合评价法等[5-7]。但大部分方法依赖于历史数据,导致得到的结果可靠性较低。虽然一些研究使用了传感器实时监测值作为油气泄漏火灾定量风险评价的内核[8],但是使用单一传感器数据超限预警可靠性较差且不能代表某一类风险,而不同传感器数据之间存在证据冲突,因此有必要建立一种基于多源数据融合的联合站风险预警方法。
在风险预警的研究领域,粗糙集理论[9]、可拓理论[10]等方法的应用已经较为成熟,有许多学者提出了多种基于数据融合的风险评估方法[11],其中DS证据理论(DST)在多源异构数据融合方面的应用较广泛。但传统的DST无法对存在高度冲突的证据进行有效融合,且不能解决如何获取合理的初始基本概率分布(basic probability distribution,BPA)的问题。为此,学者提出了许多改进的DST[12-13],但大多没有考虑使用大量的实时监测数据,BPA构建的不确定性仍然存在。
因此,笔者提出了一种基于云模型及DST改进的多源数据融合方法。首先,基于云模型的逆向云发生器提出BPA函数的构建方法,解决了BPA获取的随机性和不确定性问题。其次,通过计算证据的可信度权重和信息量权重对各证据的初始BPA进行修正。最后,使用DST的组合规则对修正的BPA进行融合。结果表明,笔者提出的方法不仅可以获得更高的置信度,在证据间存在高度冲突时,还可以更好地融合处理冲突证据,避免出现违反直觉的结果,验证了方法的有效性和合理性。
1 理论基础
1.1 云模型理论
云模型使用期望(Ex)、熵(En)、超熵(He)3个特征参数来表征一个云团,其为一个定性概念。Ex是对一个定性概念的定量表征;En反映了一个定性概念的模糊性和相关性;He反映了熵的不确定性。云模型中逆向云发生器可实现由数值向定性语言表达之间的转化。对于区间指标变量[Cmin(k),Cmax(k)]而言,可采用双边约束法确定3个特征参数,具体算法如下:
(1)
(2)
He=α
(3)
式中:Cmin(k)、Cmax(k)分别为第k个云团区间阈值的下限和上限;α为一个常数,既可以通过与En制定某种线性关系获取,如α=0.1En,又可以通过专家评估确定一个合适的常数。
确定云模型的3个特征参数后,对于获得的传感器数据集X=(x1,x2,…,xm),每个数据xi对于云模型的隶属度可通过式(4)进行计算:
(4)
式中:μij为第i个数据对第j个云模型的隶属程度,i=1,2,…,m,j=1,2,…,n;En′ij~N(En,He2);Exij、Enij、Heij分别为传感器数据xi的第j个云模型的特征参数。
1.2 DS证据理论
DST可以将多个单一因素对某个命题的概率分布转化为多因素对某个命题的概率分布,从而利用多因素综合分析研究对象的状态。在DST中,信念函数(Bel)和似然函数(Pl)分别代表BPA中某事件可信度的下限和上限,其定义如式(5)和式(6)所示,其中A,B∈θ。显然,对于∀A∈θ,有Pl(A)≥Bel(A)。
(5)
(6)
DST可将单因素的BPA组合为多因素集合的BPA,其组合规则如下:

(7)

1.3 散度距离
WANG等[14]提出一种改进的散度测度,可反映不同子集的影响。其定义如下:设U为一个给定的论域,对于U中的每个元素x,其辨识框架为θ,对于给定任意的定义于θ的两个基本概率分布μ1={μ11,μ12,…,μ1n}、μ2={μ21,μ22,…,μ2n},μ1、μ2间的散度测度D(μ1,μ2)为:
(8)
(9)
(10)
式中:S(μ1,μ2)为Kullback-Leilber散度。事实上,PBl(μij)将证据的质量函数转换为概率分布,考虑了证据的置信度和似然度,可以体现出不同类型子集之间的相关性。
1.4 信息熵
DENG[15]提出一种新的信念熵,称为邓熵,是测量不确定性信息的有效方法。假设Aij为概率分配μi的一个假设,|Aij|为集合Aij的基数,则集合Aij的熵Ed(μi)为:
(11)
由式(11)可知,Aij的基数越大,邓熵越大,该证据包含的信息量越大,可信度就越高。
2 基于多源数据融合的风险预警
2.1 油气联合站蒸汽云爆炸事故风险因素及相关性分析
(1)根据事故类型相关风险因素,分析与事故风险水平相关的风险评价因子。为简化油气联合站风险预警模型,将油气联合站事故预警的主要方向定为蒸汽云爆炸(vapor cloud explosion,VCE)事故预警。结合相关国家标准、石油运输企业的适用文献、专家意见和分析经验,选择温度、可燃气体浓度和可燃气体浓度梯度3个因子来评估VCE事故的可能性。
(2)划分风险分区。以油气联合站主要设备设施或工艺流程为依据划分风险分区,主要分为三相分离器区、油罐区、水罐区、换热区和泵区等。
2.2 BPA函数构建
(1)根据各评价因子历史数据特征的变化与系统可靠性之间的关系,划分风险等级,构建识别框架,为各评价因子各风险等级设定合理的区间阈值。
(2)根据逆向云发生器,确定与每个评价因子的每个风险等级相对应的云模型及其3个特征参数,根据式(4)构建BPA函数。
2.3 确定证据可信度权重
(1)根据式(5)、式(6)计算得到证据的置信度与似然度。

(12)
(3)根据式(13)计算证据μi的支持度Supi,并根据式(14)将证据体支持度进行归一化处理,得到其可信度权重WC(μi)。
(13)
(14)
2.4 确定证据信息量权重
(1)通过式(11)计算证据体的信息熵。
(2)为避免对信息熵为0的证据赋0权重,将证据的信息熵转化为信息量IVi。
1≤i≤m,1≤j≤n
(15)
(3)将证据信息量的归一化,确定证据的信息量权重WIVμi。
(16)
2.5 生成并融合修改后的证据
(1)计算证据体的综合权重W(μi)。
(17)
(18)
(19)
(4)根据Dempster组合规则(式(7))处理各证据更新后的BPA,获得融合结果。
(5)当存在多级数据时,先分别对同类数据进行融合,将得到的每一类数据的融合结果作为不同类数据融合的初始BPA,再进行不同类数据的融合,并根据最大隶属度法则确定最终的风险等级。
3 验证分析
基于多源数据融合的油气联合站风险预警模型的流程图如图1所示,某油气联合站二级沉降罐区周围的传感器分布图(光纤温度传感器和可燃气体浓度传感器)如图2所示。
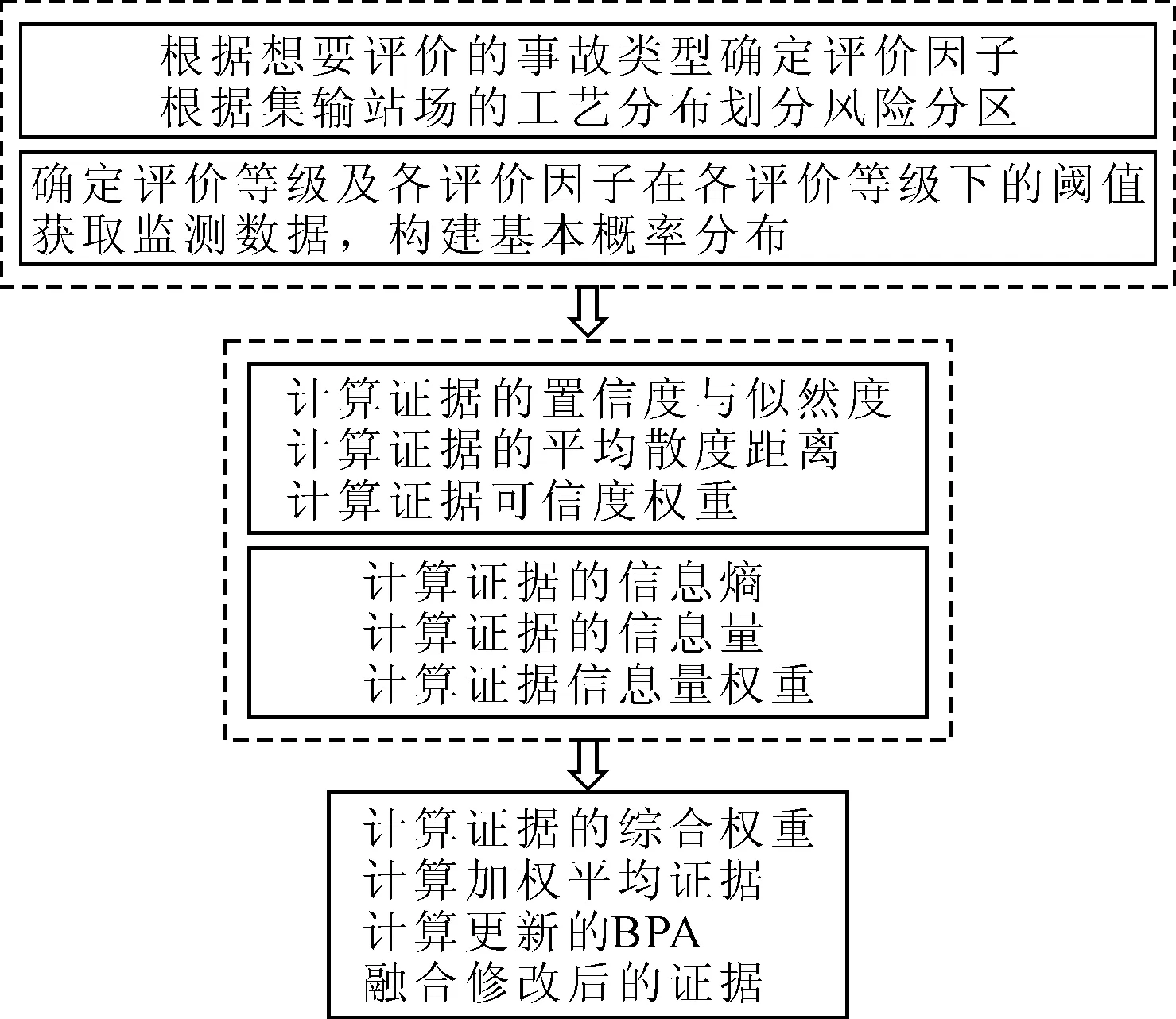
图1 方案流程图
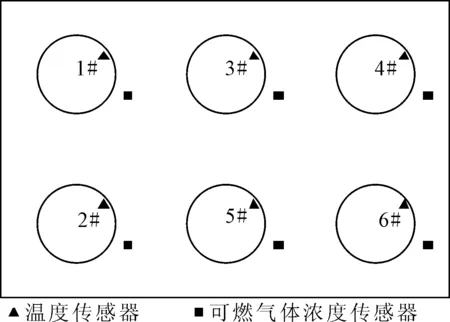
图2 油罐区传感器分布图
3.1 BPA函数构建
油气联合站油气泄漏后发生VCE事故的风险等级分为一般、中等、高等和极高4类,各评价因子对于各风险等级的阈值区间如表1所示。
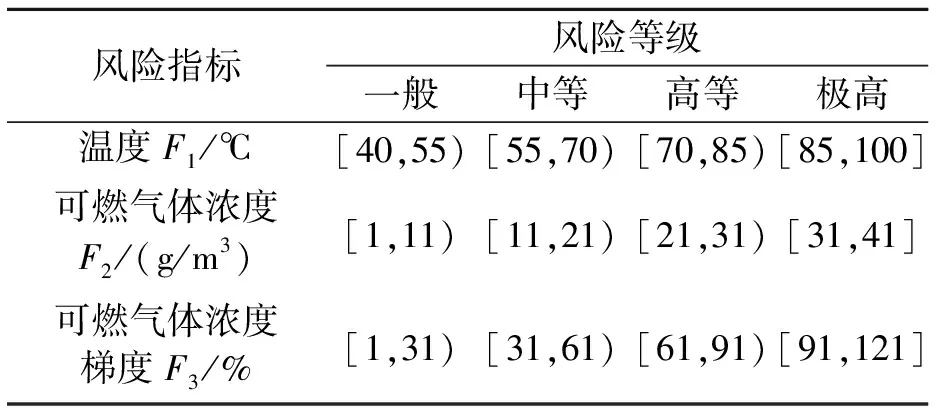
表1 各评价因子对于各风险等级的阈值区间
利用式(1)~式(3)计算出不同评价因子不同风险等级对应云模型的特征参数。其中定义He为常数0.05[16],确保不确定度可控且保持在较低水平。各云模型的特征参数如表2所示,其显示了3个评价因子对应的不同风险水平云的3个特征参数。在这个过程中,如果监测值超出边界风险预警等级的期望,则隶属于相近风险等级的隶属度为1。

表2 各云模型的特征参数
可燃气体浓度梯度需要二次计算,其间隔2 min的浓度梯度可由式(20)、式(21)计算得出。最终所得t时刻3项评价因子的实时数据如表3所示。
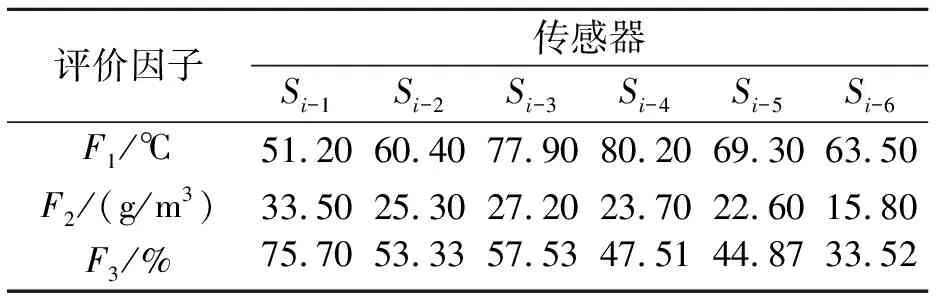
表3 t时刻3项评价因子实时数据
(20)
(21)
式中:A为L个可燃气体浓度数据样本的均值;Dl为可燃气体浓度取样数据;D为监测点当前可燃气体浓度数据;AI为百分比梯度。
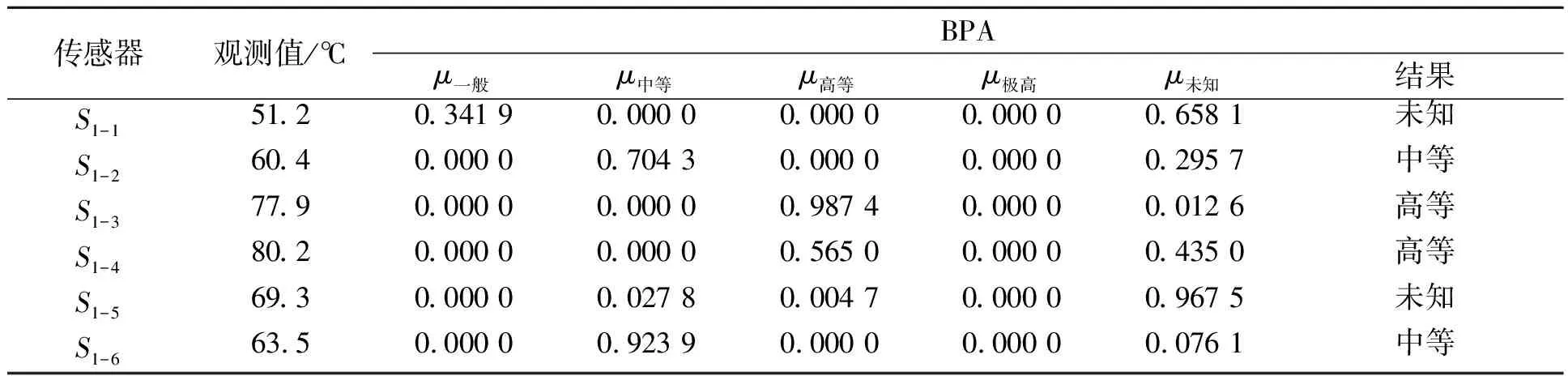
表4 温度因素各监测数据的BPAs和风险等级评价结果
3.2 BPA修正并融合

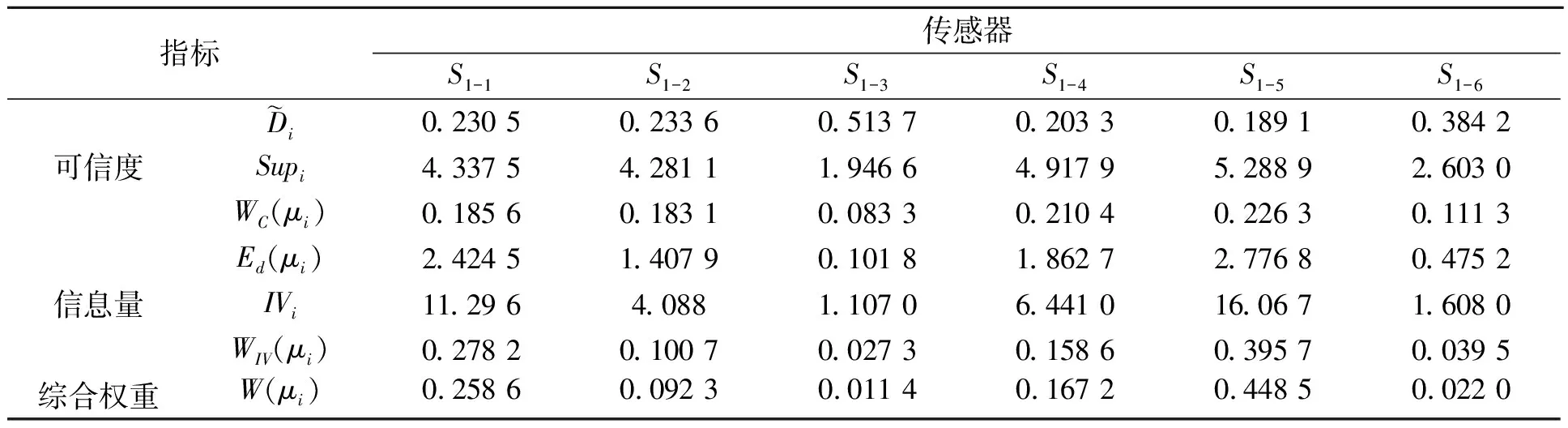
表5 F1风险评估的各计算结果

表6 加权平均证据
从表7可以看出,更新后的BPA相较于初始BPA处于未知状态的概率更大,这是由于在数据处理过程中将两种状态临界点附近的数据归纳到了未知状态。未知状态表示油罐区风险水平可能处于4种风险等级的任意一种。因此,在后续处理数据的过程中将处于状态临界点的数据造成的误差分布到各风险等级下,有效处理了BPA构建过程中的不确定性问题。
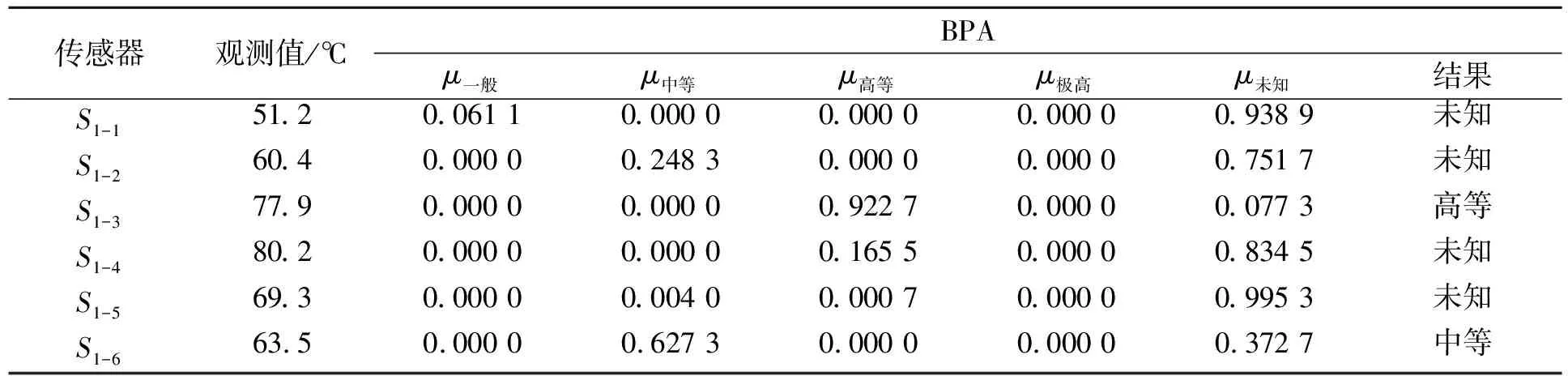
表7 F1更新后的BPAs
根据式(7)处理更新后的BPA可获得评价因子F1的风险评价融合结果,同理可得评价因子F2、F3的风险评价融合结果。将各评价因子的融合结果作为联合站油罐区VCE事故风险水平的初始BPA,对联合站的油罐区风险水平进行多传感器数据融合评估。采用传统DS方法,即根据Dempster组合规则(式(7))对获取的各评价因子的初始BPA进行融合,与笔者所提方法进行对比分析,具体结果如图3~图6所示。
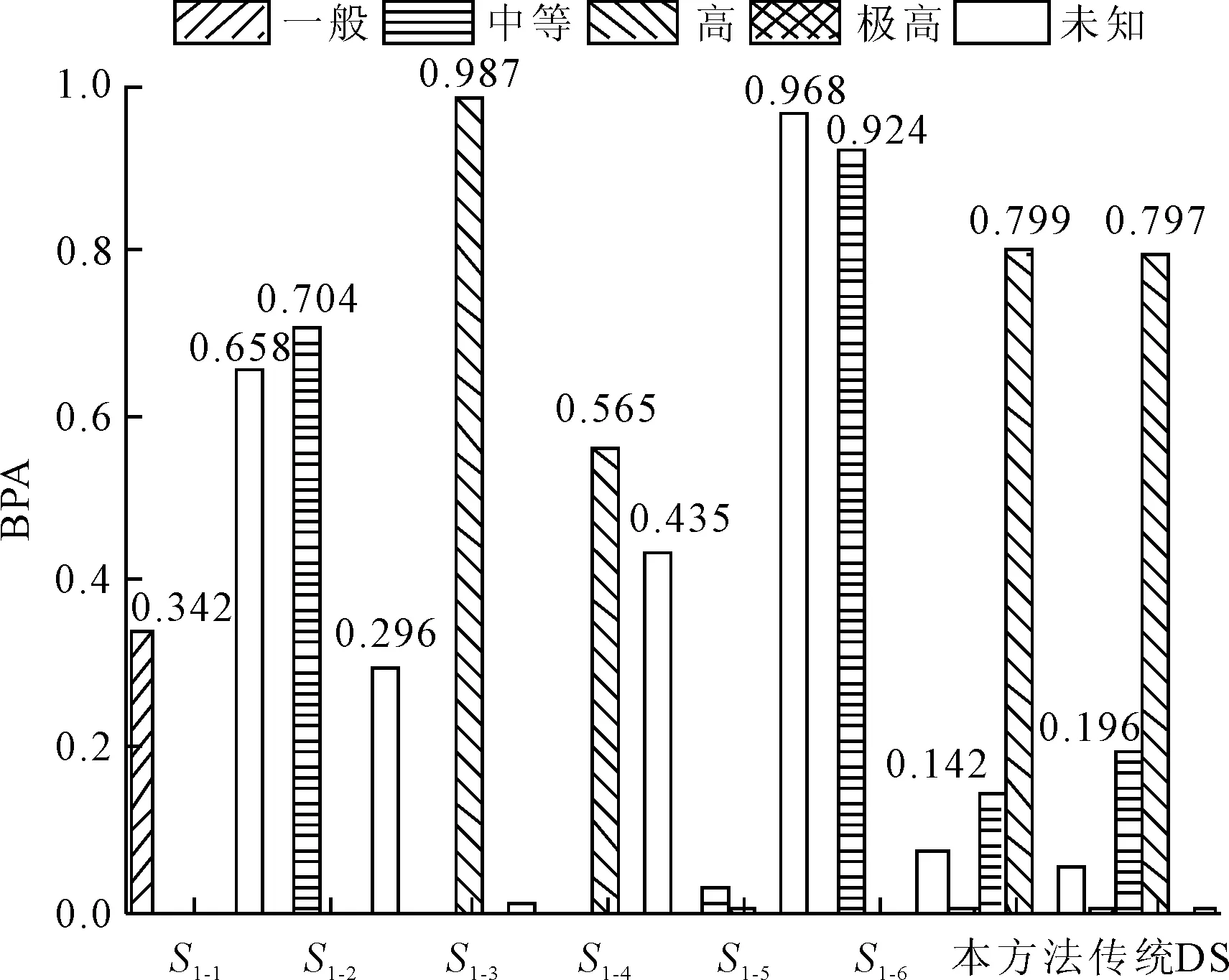
图3 F1各方法风险评价结果对比
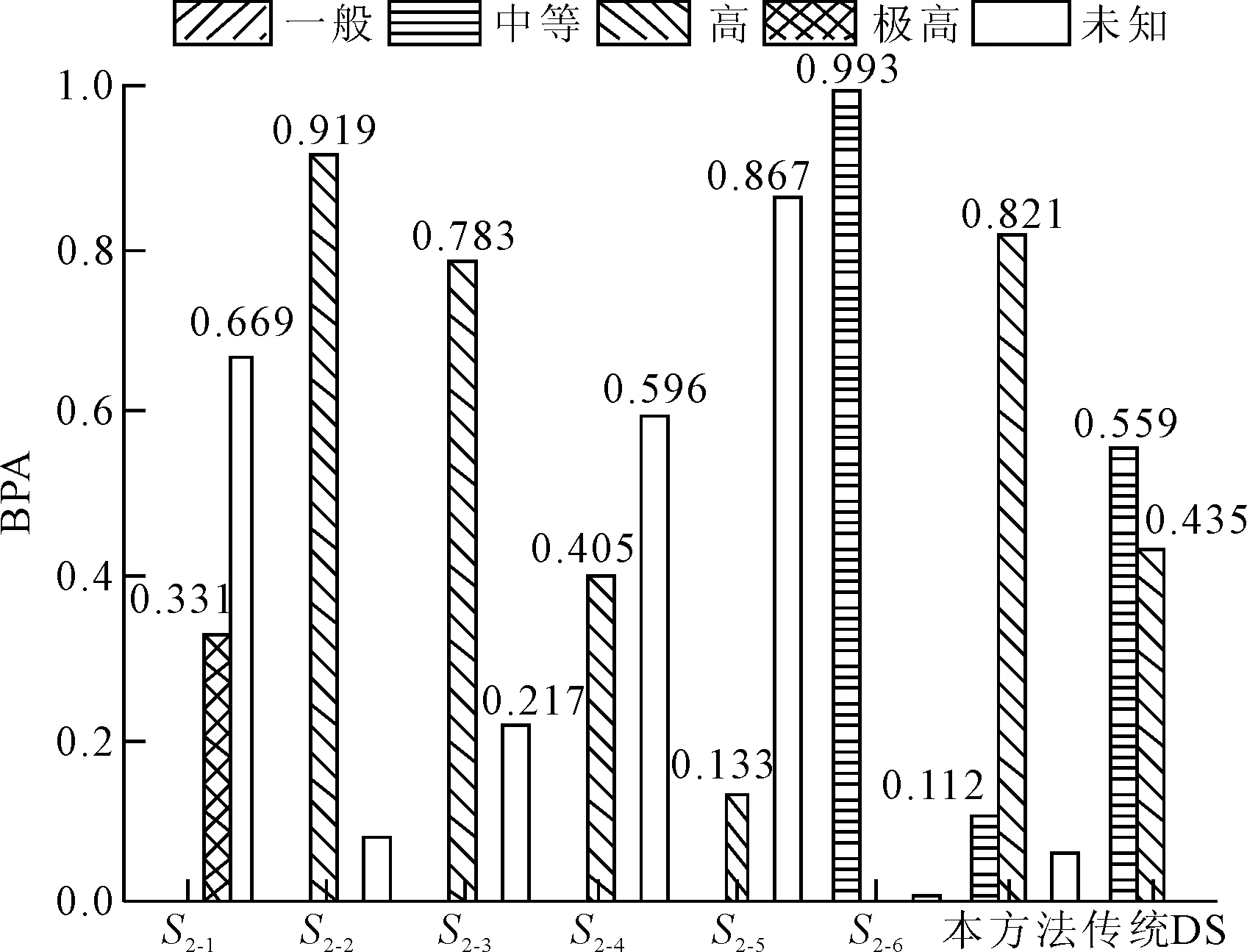
图4 F2各方法风险评价结果对比
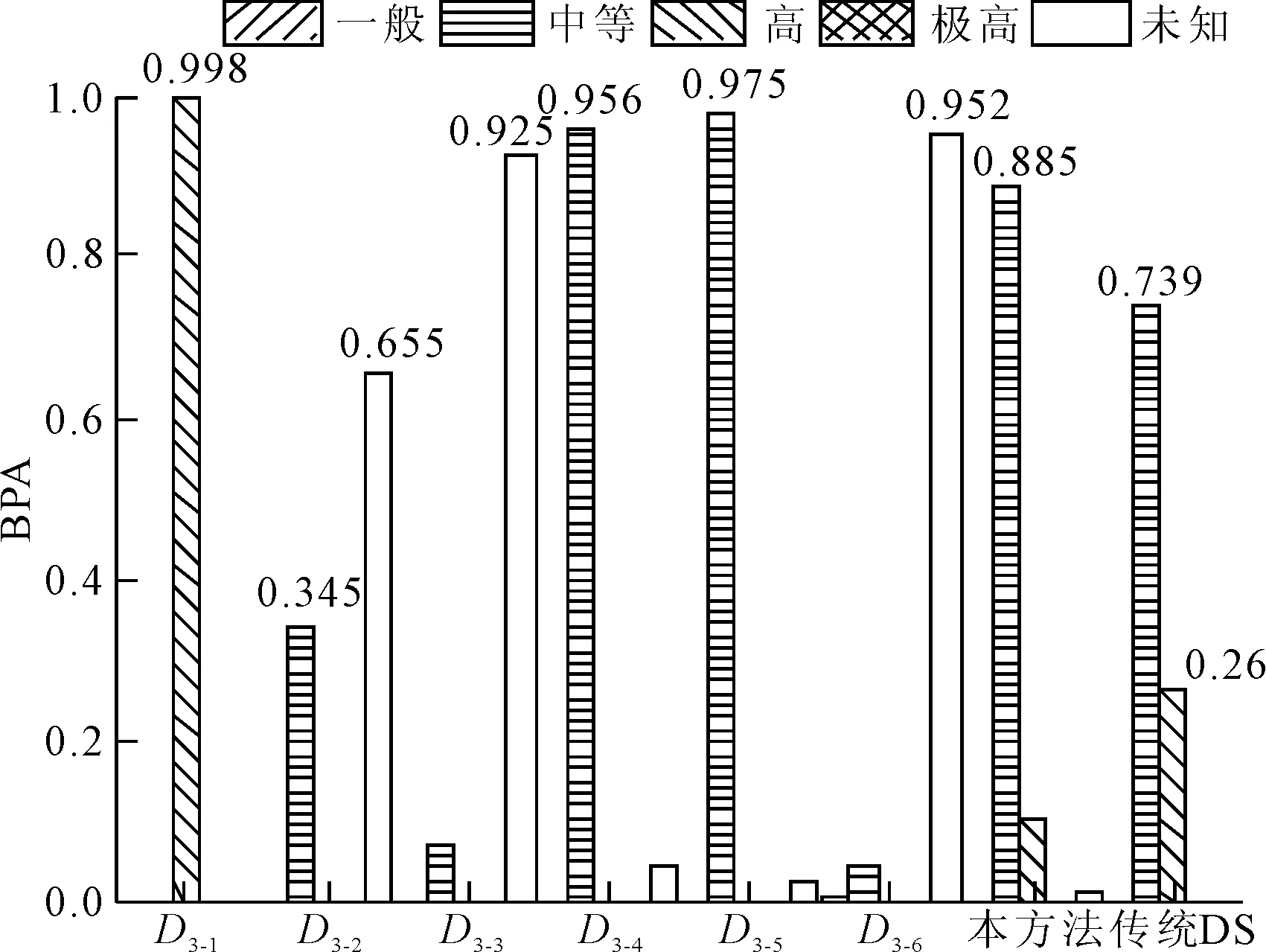
图5 F3各方法风险评价结果对比
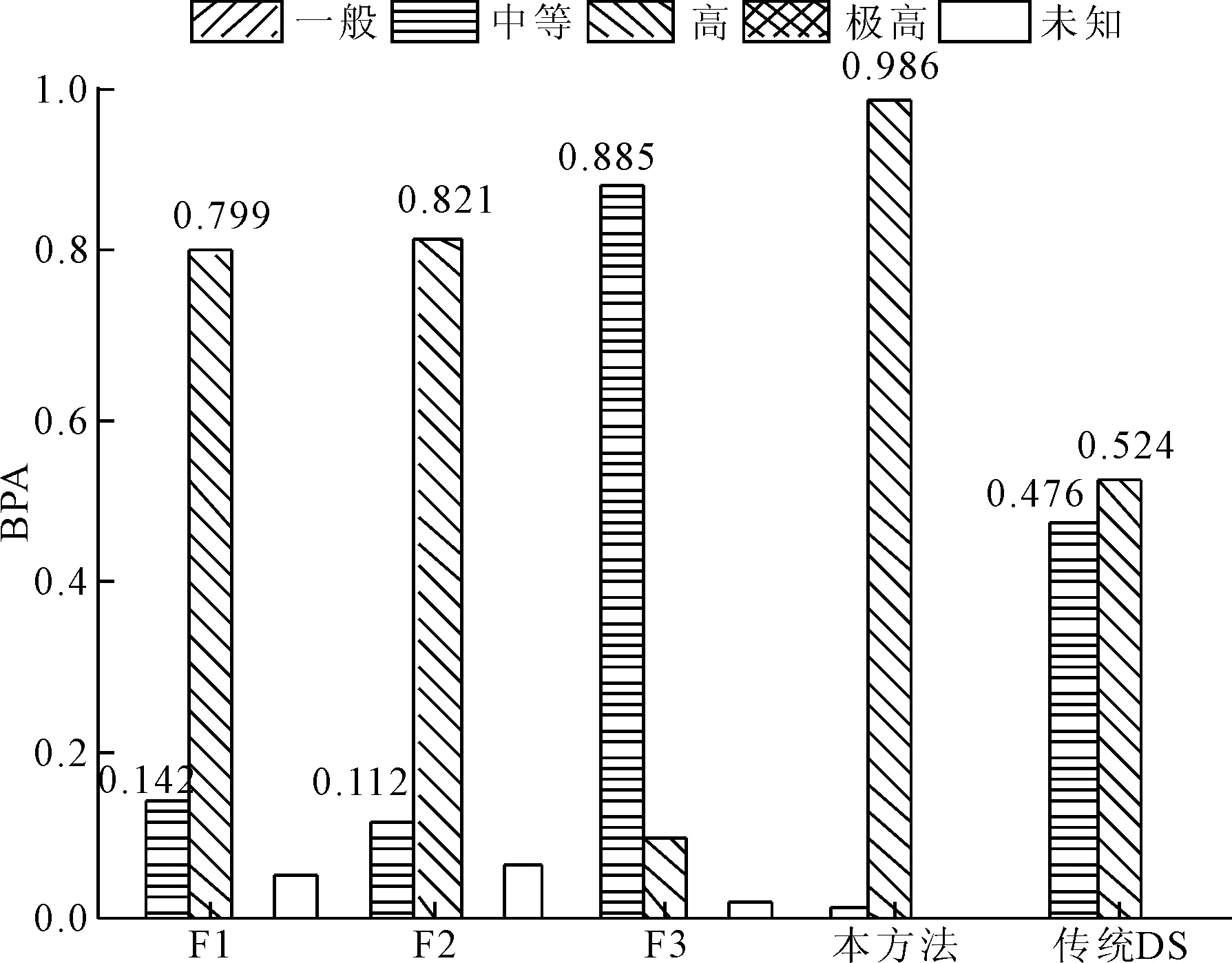
图6 油罐区各方法风险评价结果对比
使用最大隶属度法确定评价因子F1、F2、F3及油罐区的风险评价结果,由图3~图5可知,某些单传感器预警结果的置信度较低,某些单传感器预警结果为未知,不能提供准确的预警结果,而笔者所提方法有效处理了监测信息并得到了准确的风险预警结果。由图3、图5、图6可知,传统DS方法与笔者所提方法得到的风险评价结果一致,分别为高等、中等、高等,但是置信度却不相同,笔者所提方法获得的置信度高于传统DS方法。由图4可知,传统DS方法得到的风险等级为中等,而笔者所提方法得到的风险等级为高等。由数据S2-1、S2-2、S2-3、S2-4、S2-5、S2-6所得风险等级分别为未知、高等、高等、未知、未知、中等,且数据S2-1、S2-4、S2-5的风险评价结果中除未知外,隶属度第二大的分别为极高、高等、高等,通过人的直觉综合判断该系统所处风险等级应为高等或以上,说明传统DS方法出现了违反直觉的结果。这是由多个证据间存在高度冲突造成的,而笔者所提方法有效解决了这个问题,保证了结果的准确性。
4 结论
构建了油气联合站VCE事故风险的证据识别框架,提出将云模型的逆向云发生器方法应用于BPA构建。量化了证据的可信度及信息量,建立了改进的多源数据融合模型。以某联合站油罐区为例完成了模型的验证分析。结果表明:①所提出的BPA构建方法有效降低了DST中BPA获取时主观因素的影响;②相较于单传感器数据预警,所提方法获得的风险预警结果更准确。③在证据一致时,所提方法可以保证结果的正确性;在证据间存在高度冲突时,所提方法可以很好地处理冲突数据得到正确的结果。
猜你喜欢
数学物理学报(2021年4期)2021-08-30
中等数学(2020年1期)2020-08-24
文化创新比较研究(2020年8期)2020-01-02
今日农业(2019年12期)2019-08-13
特别健康(2018年3期)2018-07-04
现代园艺(2017年22期)2018-01-19
红土地(2016年3期)2017-01-15
幼儿智力世界(2016年6期)2016-05-14
发明与创新(2016年33期)2016-04-16
火控雷达技术(2016年3期)2016-02-06