IoT 网络中基于多天线技术的无人机通信传输性能优化
2023-05-15 07:36冒海微吴彬彬
现代电子技术 2023年9期
冒海微,吴彬彬
(1.镇江市生态环境保护调度中心,江苏 镇江 212000;2.陆军工程大学 通信工程学院,江苏 南京 210001)
0 引 言
当前无人机的应用飞速发展,无人机自身固有的机动性、灵活性和高度适当等特性使其在无线系统中有非常大的应用潜力。一方面,无人机可用作空中基站,增强无线网络覆盖、容量、可靠性和能效;另一方面,无人机可用作蜂窝网络内的飞行移动终端。这种蜂窝连接的无人机可实现从实时视频流到物品派送的多种应用[1]。随着无人机越来越流行,针对无人机链路资源调度和规划是一个充满挑战且不可忽视的关键问题之一[2]。
文献[3]指出,在带宽资源有限且存在主用户的场景下,通过在认知网络中设定无人机和地面传感器设备为次级用户这种方法,利用无人机的移动轨迹可以很好地提高无人机的通信性能;然而,文中只给出了无人机位置可以减少主用户和次级用户之间的干扰这一结论,并未对无人机与地面用户本身之间的通信链路进行优化研究。文献[4]研究了在D2D 场景下,根据无人机的飞行高度、发送功率和带宽最大化地面的D2D 通信速率。文献[5]虽然考虑了用户和无人机、无人机和无人机、无人机和基站之间的回程链路频率资源分配,研究了频带内到地面、频带外到地面、频带内有线连接三种回程模式,但同样未分析无人机与地面用户之间的上下行链路资源,并且研究中无人机采用的天线无论是定向天线或全线天线其波束宽度都是固定的,研究结果并不能直接应用到实际工程中。
随着多天线技术在无人机通信领域的应用和发展[6-7],天线特性(辐射模式、极化和定向)会对整个链路的传输性能起到关键作用,因此,研究在物联网中结合多天线技术对无人机通信很有意义。文献[8]在多用户通信系统中提出一种联合无人机飞行高度和波束宽度的优化方法,采用波束宽度可调节的定向天线,分析了无人机的高度、天线波束宽度等因素对MC/BC/MAC三种场景下的系统和速率的影响,但未对上下行链路功率进行进一步的优化和调度。
除了多天线技术在无人机通信中的应用研究之外,通信信道模型的选择也很重要,文献[9-10]中详细介绍了NLOS 和LOS 信道模型,文献[11]借鉴地面DVB-T2 研究了UAV 信道中的瑞利和莱斯模型,文献[12-13]中考虑地面障碍物反射和路边障碍物反射,采用几何模型对无人机信道进行三维建模,都是目前无人机通信研究的重点领域。
本文主要研究了在物联网中结合多天线技术对无人机通信的上下行链路功率控制,采用可配置波束宽度和功率的阵列天线对无人机通信的上行链路和下行链路的传输性能进行分析和优化。对下行链路考虑LOS信道模型,无人机对波束覆盖范围内的地面传感器设备根据位置信息配置不同发射功率。首先,提出一种基于位置信息的自适应功率分配算法分析了下行链路的最优容量;其次,进一步针对实际应用中覆盖范围内的传感器设备需获得最小可行通信速率,提出一种基于位置的功率预均衡算法,使得覆盖范围内的用户能够获取稳定的通信质量。对上行链路考虑频谱共享环境下的传输方式,提出一种基于位置信息的非合作博弈功率控制方式。针对地面传感器设备用户的QoS 水平设计收益函数,根据发射功率、位置信息以及历史功率变化设计开销函数。采用收益函数和开销函数的加权作为博弈用户的效用函数,该博弈模型能够保证上行链路稳定的通信质量。
1 系统模型
本文考虑一种基于无人机的物联网多用户通信系统,设任务区域面积为A,如图1 所示。存在K个用户和1 架无人机,且用户在A区域内按一定的概率密度分布(如均匀分布或泊松分布等),则用户密度为ρ=K A。
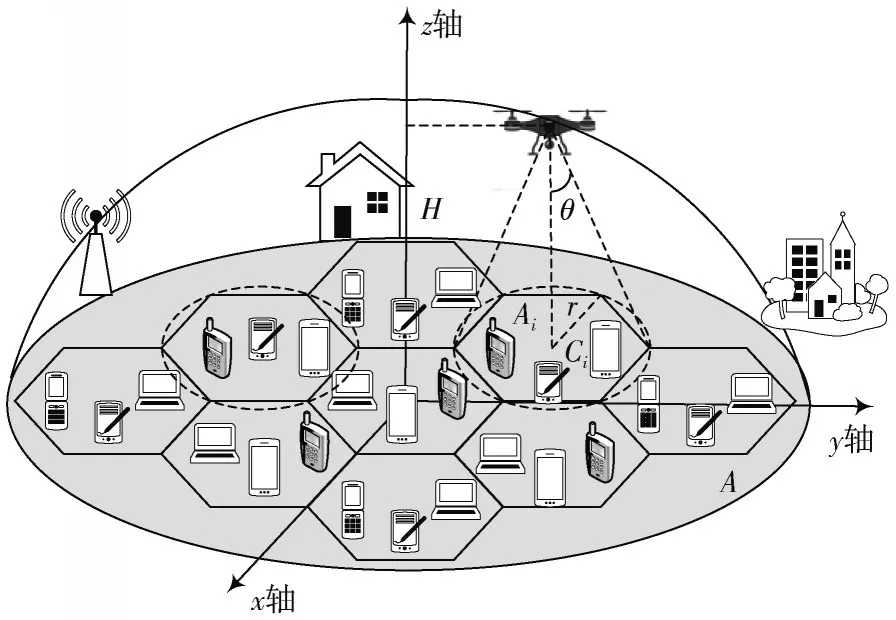
图1 基于无人机的物联网多用户通信系统
假设无人机装备有波束宽度和功率可配置的阵列天线,为简单起见,介绍方位角和仰角的无人机天线半功率波束宽度相等,且都表示为2Φ,Φ∈( 0,π/2 )。此外,假设每个地面传感器设备装备的为全向天线。因此,当无人机的位置给定之后,只有位于无人机主波束覆盖半径=HtanΦ内的用户才能够进行通信服务。假设地面传感器设备为户外农村,且无人机和用户之间的主要链路为LOS,因此在覆盖半径范围内信道功率增益为:
式中:β0为每米信道功率增益;0 ≤r≤为地面传感器设备与无人机投影位置的水平距离。
假设区域A足够大,使得无人机波束不能完全覆盖,因此可以根据无人机的覆盖范围将区域分成N份,为第i个子区域面积,则Ai中的用户数量为:
值得注意的是,在每个区域Ai内无人机盘旋在中心位置Ci,根据预先定义好的区域划分策略,无人机按照最优的轨迹飞行,并在每个区域Ai的中心Ci驻留一段时间Ti进行通信服务[14]。本文不考虑区域划分、飞行估计以及驻留时间策略的优化设计,着重研究在无人机驻留进行通信服务时的上下行链路功率控制及传输性能分析。
2 下行链路功率控制
考虑下行链路中无人机需要满足在驻留时间Ti内发送不同的信息到区域Ai中的传感器设备,目的是最大化区域Ai内所有传感器设备获取的和速率。则优化问题可定制如下:
式中:H为飞行高度,Φ为无人机方位角,H和Φ决定了无人机的覆盖范围;p(r)为基于地面传感器设备和无人机投影水平距离r的功率谱密度,该功率谱密度可采用阵列天线完成设置;P为无人机下行总功率;Rdown(r)为距离无人机r处的速率,可表示为:
式中SNRdown(r)为距离无人机投影位置r处的地面传感器设备的接收信噪比,可写为:
2.1 平均分配
若对区域Ai内的用户采用平均功率分配方式,则:
代入式(3a)可得:
2.2 自适应分配
若在约束条件(3b)(3c)(3d)下采用注水算法可得:
式中:μ为功率归一化的常数因子,可根据约束条件(3d)求得;N0为噪声功率谱密度;[]+表示正数定义,即:
因此可以根据注水算法求得下行链路的最大和速率如下:
注水算法虽然能够满足系统的和速率实现最大化,但其根据地面传感器设备的信道质量进行功率分配,就会造成距离无人机越远的用户获取的通信速率越小,甚至为零,而距离无人机较近的用户也不需要特别大的通信速率,一般实际系统中地面用户设备只需要且必须要满足最小可行通信速率。因此本文进一步考虑实际系统应用,提出一种基于位置信息的预均衡算法实现下行链路的功率优化。
2.3 预均衡分配
在预均衡算法中,发送功率谱需要满足如下条件:
式中C为常数。
根据约束条件(3d)可得:
因此可得到下行链路的和速率如下:
无论是均匀分配的、基于注水算法、预均衡的功率谱密度分配方式,下行链路的最终和速率均与无人机的飞行高度和方位角相关,本文不研究最优的飞行高度和方位角,只分析不同高度和方位角下三种功率分配方式下的传输性能对比。
3 上行链路功率控制
上行链路考虑区域Ai内的Ki个地面传感器设备向无人机发送信息,由于地面传感器设备的业务量以及与无人机之间的距离不一样,因此若要在驻留时间Ti内完成通信传输,则需要不一样的传输功率。设地面传感器设备的传输功率为pj,j=1,2,…,Ki,0 ≤pj≤pmax,假设该物联网中地面传感器设备采用CDMA 传输方式共享一个频率资源,无人机接收到地面传感器设备j的信噪比为:
式中:hj为地面传感器设备j和无人机之间的信道功率增益;cjk为扩频码相关系数;其他无人机对传感器设备j的干扰功率为;σ2表示无人机所处环境的背景噪声。
3.1 构建博弈模型
1)参与者Ki={1,2,…,Ki}表示地面传感器设备集合。
2)策略空间p=[p1,p2,…,pKi]T表示所有无人机的回程发射功率向量,其中对任意j∈Ki,pj表示第j个地面传感设备的发射功率策略,且。
3)uj(pj,p-j)表示地面传感设备j的效用函数,其中,p-j表示除pj外其余所有设备的发送功率。在这个功率控制博弈中,每个无人机都设法使自己的效用函数最大化,即。
3.2 效用函数设计
效用函数的设计一方面关注无人机处的接收信噪比,另一方面则需要考虑地面传感器的能源消耗。在本文研究的系统中进一步提出针对地面传感设备和无人机之间的位置信息设计效用函数如下:
式中:ajln(SINRup(j)-SINRth)为收益函数,aj为收益函数调整因子;为综合代价函数,hj为地面传感设备j和无人机之间的信道功率增益,为当前的发送功率,为过去n个时刻功率和,pth为地面传感设备j的阈值功率,bj为代价因子。当SINRth≤SINRup(j)≤SINRtar时,bj保 持 不 变;当SINRup(j)>SINRtar时,bj=bjSINRup(j)/SINRth,增大对该传感器设备的惩罚,降低其对其他传感设备的干扰。综合代价函数cj不止是考虑当前发射功率,还参考历史发射功率的经验信息,使发射功率在博弈过程中的波动减少,提高传感设备功率控制的稳定性,降低了功率控制的开销。同时既考虑传感设备与无人机的距离,还增加了自适应调整因子,这样可以使信干噪比较好的传感设备受到的惩罚多一些,信干噪比较差的传感设备受到的惩罚少一些。而采用不同的信道增益则进一步体现了公平性,使与传感设备较远的无人机付出更少的代价,从而有效地控制了各无人机之间相互干扰,大大减少网络功率消耗,使系统可以获得更好的收益。
纳什均衡解的存在性和唯一性如下:
3.2.1 存在性证明
1)它的策略空间Pj是欧几里德空间上的非闭合有界的凸集;
2)效用函数uj(pj,p-j)在Pj上是连续的拟凹函数。
证明:因为每个无人机i的策略空间是
所以策略空间Pj是欧几里德空间上的非闭合有界的凸集。
对效用函数uj(pj,p-j)求pj的二阶偏导数,可得:
由此可知uj(pj,p-j)为连续的拟凹函数,因此该算法存在纳什均衡解。
3.2.2 唯一性证明
定理:一个功率控制pt+1=R(pt),如果满足下面三个条件,则认为该算法收敛于唯一点。
1)非负性:R(p)>0;
2)单调性:若p′>p,则R(p′)>R(p);
3)可伸缩性:对任意α>1,αR(p)>R(αp)。
证明:
1)R(p)=都是正值,所以R(p)>0
2)
3)对于任意α>1,
由于α>1,所以:
因此,可以得到αR(p)>R(αp)。所以可知该算法存在唯一的纳什均衡解。
3.3 算法迭代求解
纳什均衡是一种由所有参与者的策略组合状态,每个参与者的策略都是根据所有其他参与者的策略构成来选的最优策略。在这种状态下(纳什均衡),没有任何参与者愿意打破这种平衡,即任何参与者不能单方面地改变自身的策略以增加自身的增益,即:
为求出使得效用函数最大的p*j,对效用函数求梯度并令其等于0,因此可以得到发射功率的迭代公式:
式中t为迭代次数。经过有限次迭代之后地面传感设备的发射功率将稳定在一个合适的值,使得系统的QoS 达到满意水平。
4 数值仿真研究
设置无人机能够用于发射的最大功率为10 dBm,区域内传感器设备密度为ρ=0.005,信道环境参数为β0=0.014 2。从图2 可以看出,无人机的波束仰角为π/8 和π/12 时,采用功率平均分配方法,无人机所获取的覆盖范围内的和速率随高度的增加呈指数趋势减小,而采用注水算法和预均衡算法时,在高度小于600 m 时随高度的增加和速率反而增加,当高度大于600 m 时则呈现出与平均分配算法相近的趋势。因此,可以判断当无人机以低于600 m 高度飞行时,采用注水算法和预均衡算法获取的和速率更优。
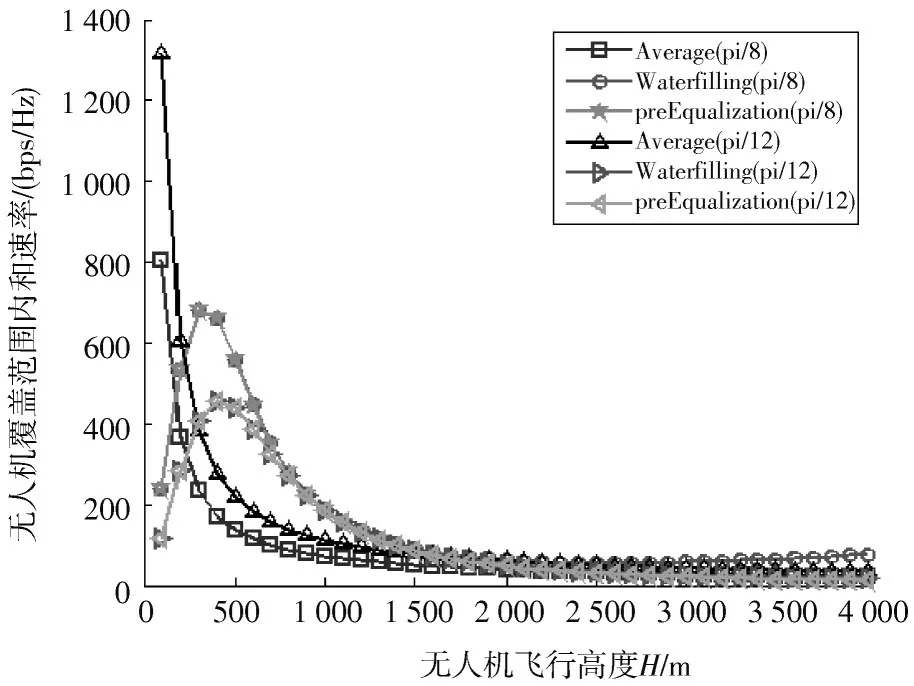
图2 无人机在波束仰角为π/8 和π/12 下,不同高度下的和速率
图3 给出了无人机飞行高度为600 m,发射总功率为13 dBm 时,不同波束仰角下的和速率,可以看出,平均分配功率算法随波束仰角的增加而递减,注水算法则是随波束仰角的增加而增加,预均衡算法的和速率则是基本保持不变。
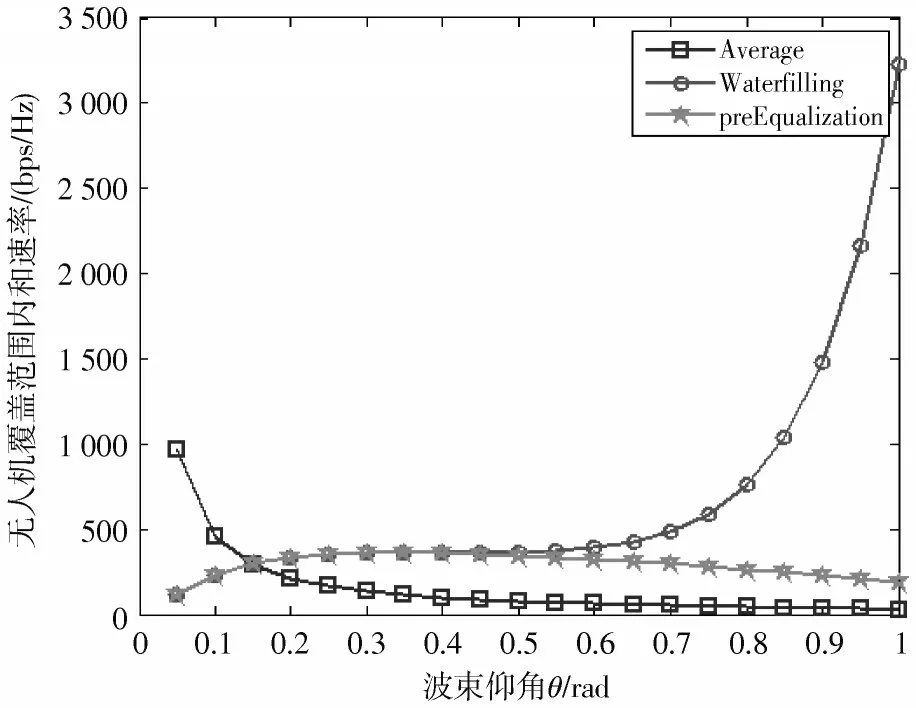
图3 无人机在不同波束仰角下的和速率
图4 给出了无人机飞行高度为600 m,波束仰角为π/8 和π/16 下不同位置的传感器能够获取的有效通信速率。可以看出,平均分配算法和注水算法用户获取的和速率都是随距离的增加而减少,但注水算法的性能要优于平均算法,而预均衡算法则是无论传感器处于覆盖范围内的哪个位置都能够获取相同的速率,而且当距离大于200 m 时,预均衡算法能够获取的速率大于注水算法和平均分配算法。因此,在实际应用中可以选择本文提出的预均衡算法,不仅能够保证地面传感器的公平性,还能够保证传输性能。

图4 无人机在波束仰角为π/8 和π/16 下不同位置传感器获取的速率
图5 给出下行链路中一架无人机和10 个地面传感器的分布情况,设置用户最大的发射功率为2 W,用户之间的干扰系数c=0.005,用户最小通信速率为Rmin=1Mb/s。
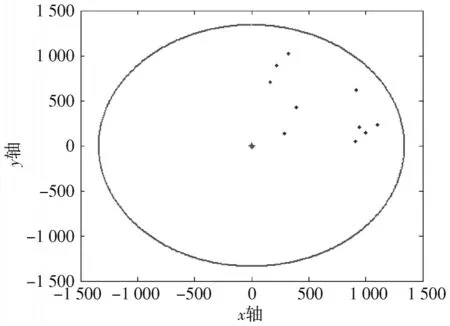
图5 无人机与地面传感器位置关系
图6 中展示了10 个地面传感器经过大约25 次博弈后的发送功率图,可以看出每个地面传感器最终的发送功率都是小于2 W 且最终收敛到一个固定值,该固定值不仅仅与距离相关,还和邻居传感器之间的互干扰相关。
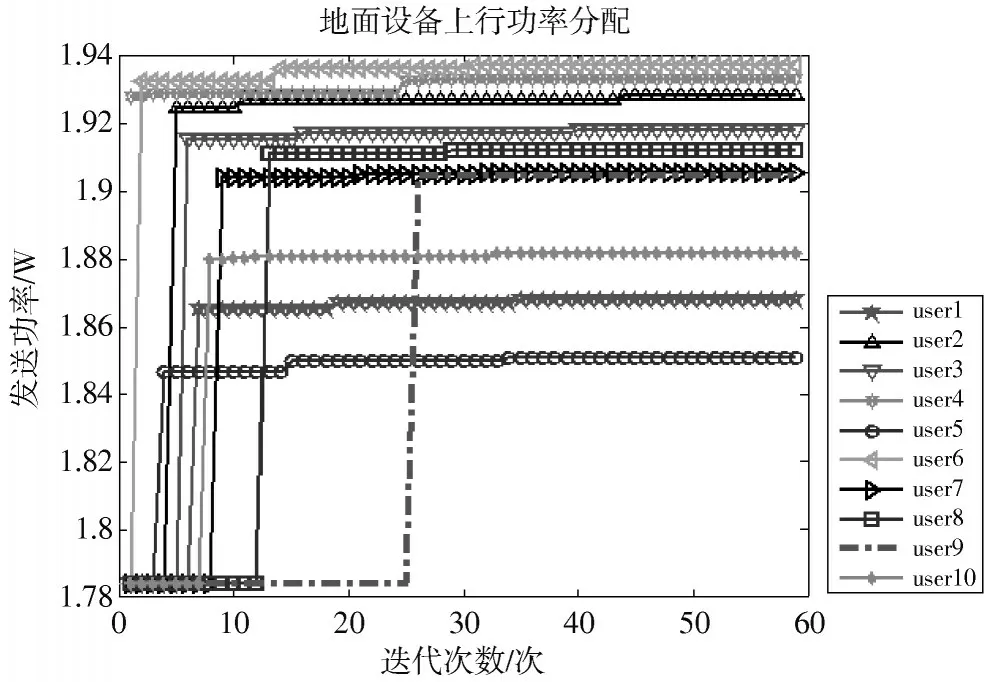
图6 地面传感器发射功率
图7 则是给出了这10 个地面传感器的发送速率,其发送速率最终也是收敛于一个固定值。无论是传感器的功率还是传输速率在本文设计的基于博弈的分布式功率分配算法中都达到了纳什均衡。
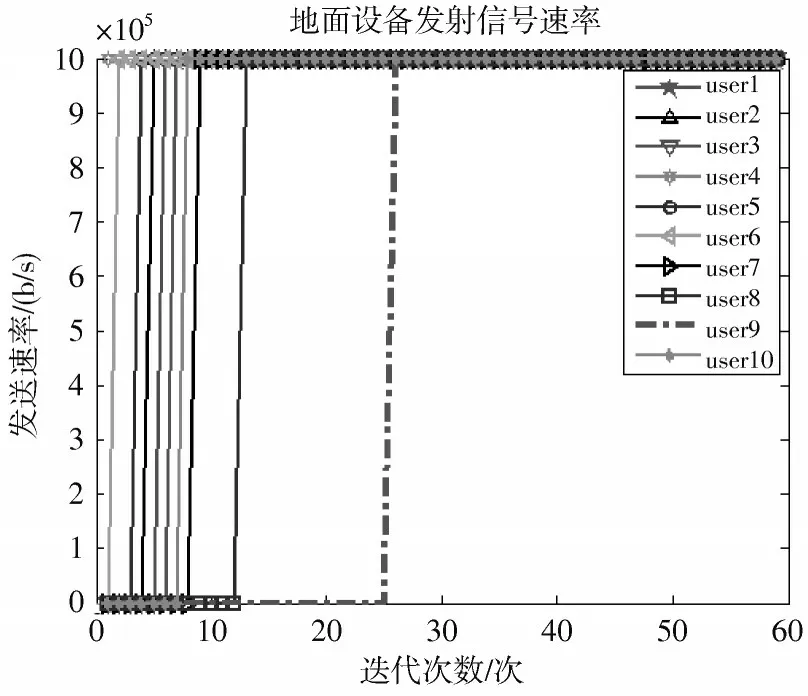
图7 地面传感器发送信号速率
5 结 语
本文分别针对在IoT 网络中无人机辅助通信系统中的上下行链路通信性能进行了分析。首先针对下行链路提出了三种功率分配方案,即平均功率分配、自适应功率分配(注水算法)和预均衡功率分配;其次,在上行链路中,基于分布式思想提出了地面传感器的博弈模型,设计了无人机-地面传感器发送功率控制方案。通过数值仿真,验证了在不同参数下,无人机通信上下行链路功率方案算法的有效性及正确性,同时,提出的模型也能够保证上行链路通信质量的稳定效果。
猜你喜欢
纺织科学研究(2023年9期)2023-10-23
移动通信(2021年5期)2021-10-25
无线互联科技(2017年24期)2018-01-22
中国管理信息化(2017年18期)2018-01-04
物联网技术(2017年2期)2017-03-15
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
华东理工大学学报(自然科学版)(2015年4期)2015-12-01
电子设计工程(2015年8期)2015-02-27
中国交通信息化(2014年3期)2014-06-05
现代防御技术(2014年6期)2014-02-28