
船舶吊运机械臂海浪环境下的运动补偿控制与模拟
2023-05-10 04:39:02李坤,任丽
舰船科学技术 2023年7期
李 坤,任 丽
(安徽文达信息工程学院智能制造学院,安徽 合肥 231201)
0 引言
船舶货物吊装的工作场景包括:
1)海上作业平台的货物转运
海洋蕴藏丰富的石油、天然气资源,为了开发这些资源,建立了多种用途的海上作业平台,如钻井平台等,这些资源开采后通过大型船舶运输至陆地,转运过程需要借助大吨位吊机进行货物转运。
2)港口装卸货物
大型集装箱船的货物装卸需要借助港口吊机,货物在船舶甲板的搬运需要借助自身吊机。
船舶吊运货物通常使用吊运机械臂完成,当船体受到海浪冲击作用和海风干扰时,一方面,船体本身的纵摇、横摇运动会引起吊运机械臂基座的运动,这种非惯性运动使得机械臂承受更大的载荷,对机械臂和基座的强度带来了挑战;另一方面,由于吊运机械臂本身具有多自由度的运动,叠加船体自身的运动,机械臂与货物会产生更大幅度的晃动,影响货物吊运的安全性。当货物吊运过程出现碰撞等事故时,会对货物和船体造成严重的冲击。
为此,本文研究一种海浪环境下的船舶吊运机械臂运动补偿控制系统,该系统的关键作用是进行波浪环境下的吊运机械臂运动补偿,提高吊运机械臂的稳定性。
1 海浪环境下的船舶吊运机械臂运动建模
船舶吊运过程中影响最大的环境因素是海浪作用力,为了提高吊运机械臂的建模精度,对海浪特性进行详细研究。
海浪运动是一种不规则波运动,在进行海浪运动建模时可以只考虑单一方向上的海浪传播特性,将复杂的海浪运动分解为不同规则波的叠加。
建立海浪特性方程:
式中:ξ0(t)为 幅值;w0为 波浪角速度; φ为初始的相位[1]。
建立能谱密度方程[2]:
式其中:k1为能谱密度系数,h0为波高。
将波浪的速度场在2 个方向上分解,可以得到:
式中,θkt为波浪的速度势。
建立船舶吊运机械臂在海浪环境下的运动坐标系如图1所示。

图1 船舶吊运机械臂在海浪环境下的运动坐标系Fig.1 Themoving coordinate system of ship lifting manipulator in sea wave environment
根据图1 坐标系,建立吊运机械臂的力矩方程[3]为:
式中:Iz为机械臂沿z轴的转动惯量;wz为绕z轴的转动角速度;Mz为干扰力矩;Msp为附加力矩。
建立机械臂的运动学方程如下式:
式中:P为机械臂电机驱动力; θ为机械臂转运角度;h为机械臂距离甲板的垂直高度;v为货物吊运的速度。
建立船舶瞬时运动速度模型为:
式中: ωi为船舶角速度,为船舶3个方向的相位;为船舶3个方向的幅值。
舰船3个坐标轴的角度模型为:
式中:(γ/θ/ψ)分 别为横摇角,纵倾角和航向角;(φr/φθ/φφ)为3个角度方向的相位;为幅值;(ωr/ωθ/ωψ为角速度。
2 船舶吊运机械臂海浪环境下的运动补偿控制系统开发
2.1 PID控制器原理
针对船舶吊运机械臂的运动补偿控制器,利用PID 控制器建立一种自适应控制系统。
PID控制器是一种应用广泛、可靠性高的反馈控制器,包括积分控制、微分控制和比例控制3部分,对于改善系统的稳态误差、非线性误差等效果明显,图2为PID控制器的原理。
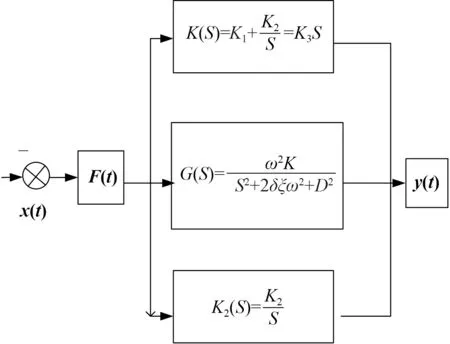
图2 PID控制器原理图Fig. 2 Schematic diagram of PID controller
PID 控制器的工作流程包括:
1)确定被控系统的信号采集周期;
2)利用比例控制和阶跃响应信号,确定PID控制器的比例放大系数K1;
3)利用积分和微分控制环节,调节被控系统的信号超调量。
PID 控制器的数学模型为:
式中:K1为 放大系数;K2为 超调量系数;K3为微分系数。
PID 控制器的传递函数为:
式中: ξ为系统阻尼比;K为增益系数。
2.2 PID控制器的吊运机械臂电动机控制研究
针对船舶机械臂的运动补偿,设计一种六自由度补偿机构,通过电机控制补偿机构上下平台的偏移量实现波浪运动的补偿。
图3为吊运机械臂运动补偿机构的原理图。
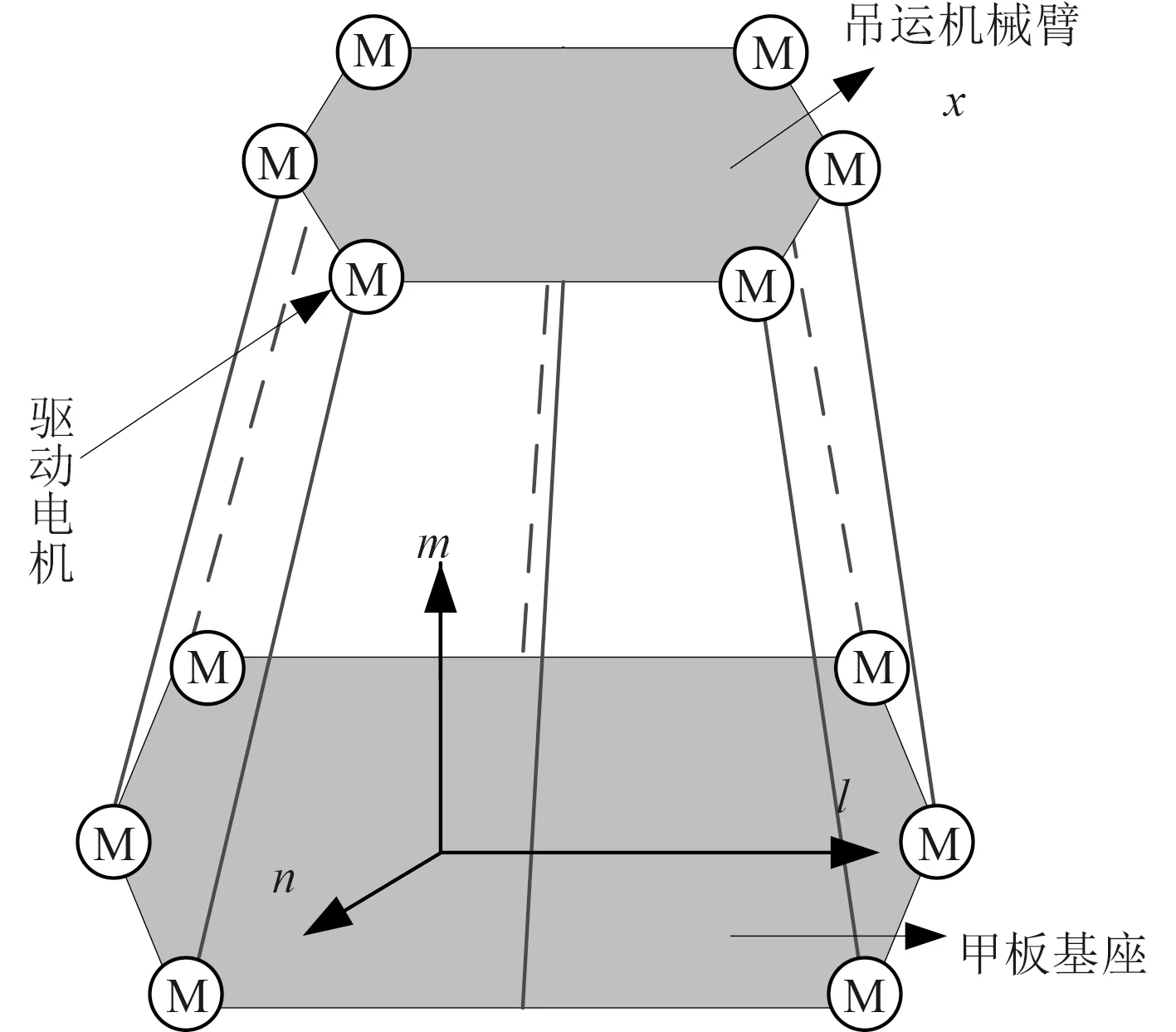
图3 吊运机械臂运动补偿机构的原理图Fig.3 Theprinciple diagram of the motion compensation mechanism of the lifting manipulator
六自由度补偿机械的关键控制环节是机械的电机伺服控制,本文使用三相永磁同步电机作为波浪补偿结构的动力来源。
建立三相永磁同步电机的电压方程如下:
式中:ua,ub,uc为三相电机定子的三相电压;Rs为电机定子的等效电阻;ia,ib,ic为定子的三相电流;φa,φb,φc为电机的三相磁链;p为电机磁链系数。
磁链方程为:
式中:Laa,Lbb,Lcc为 绕组的自感;Mi j,i=a,b,c;j=a,b,c为三相绕组之间的互感。
本文使用的电机参数如表1所示。

表1 电机参数表Tab.1 Motor parameter table
图4为波浪补偿机构电机输出电压矢量图。

图4 波浪补偿机构电机输出电压矢量图Fig. 4 Wave compensation mechanism motor output voltagevector diagram
2.3 船舶吊运机械臂波浪补偿控制系统的搭建
结合PID 控制器,针对船舶吊运机械臂的波浪补偿控制进行开发,吊运机械臂的波浪补偿控制系统原理图如图5所示。
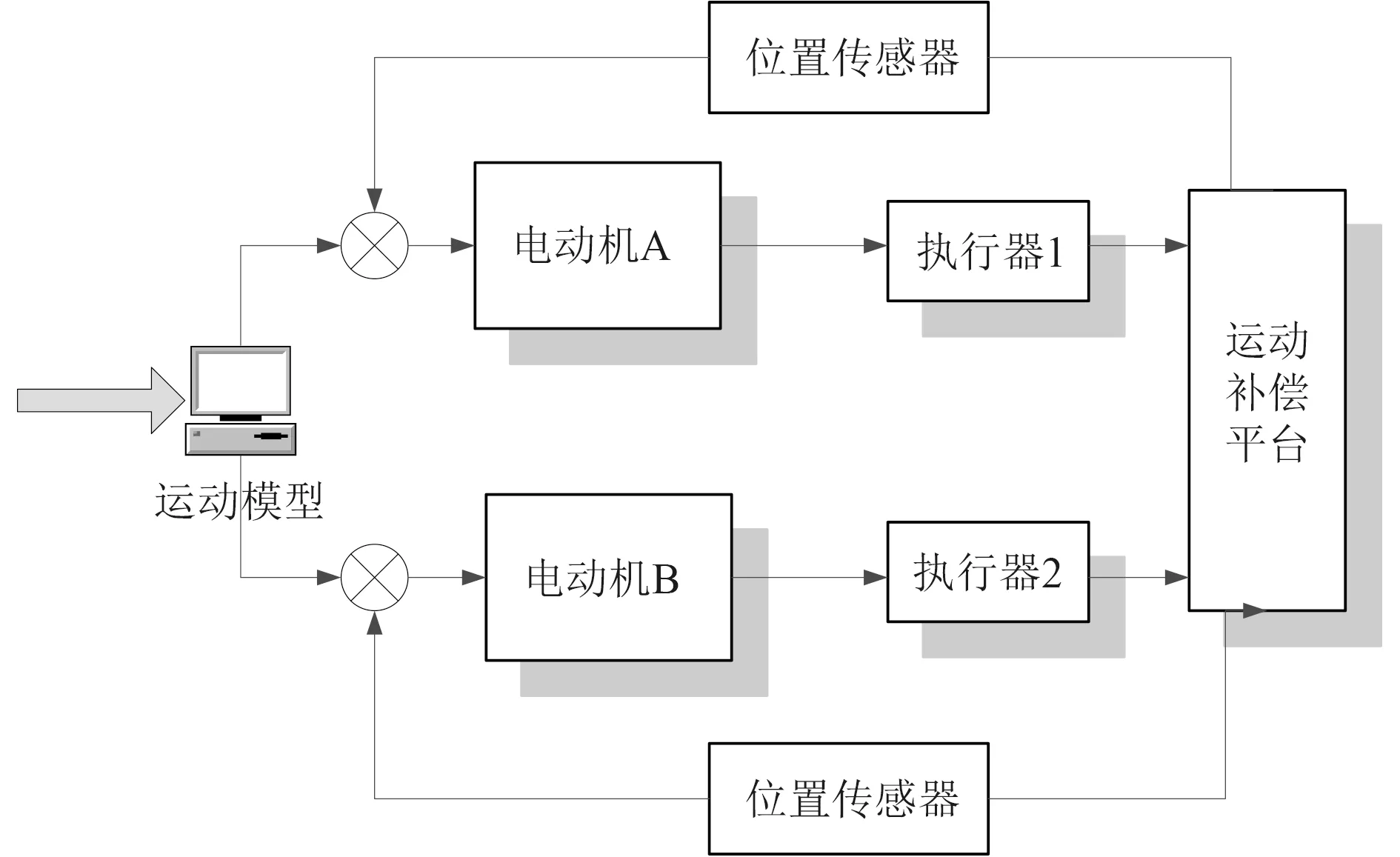
图5 吊运机械臂的波浪补偿控制系统原理图Fig.5 Schematic diagram of wave compensation control system for lifting manipulator
如图5所示,波浪补偿控制器基于PID控制原理,接收运动模型的参数,控制电动机的转矩信号,然后通过执行器进行补偿平台的控制。同时,系统位置传感器采集吊运机械臂和船体的横摇等运动参数,作为负反馈信号输入PID控制器中[4]。
首先,建立三相永磁同步电机的控制信号为:
然后,根据PID控制器原理,确定永磁同步电动机的控制精度为
接着,确定PID控制器的放大系数K1,超调量系数K2和微分系数K3。
最后,结合位置传感器的信息实现吊运机械臂的运动补偿控制。
本文在Simulink 中进行波浪补偿前后的吊运机械臂位移量仿真,得到曲线如图6所示(曲线1为补偿前,曲线2为补偿后)。
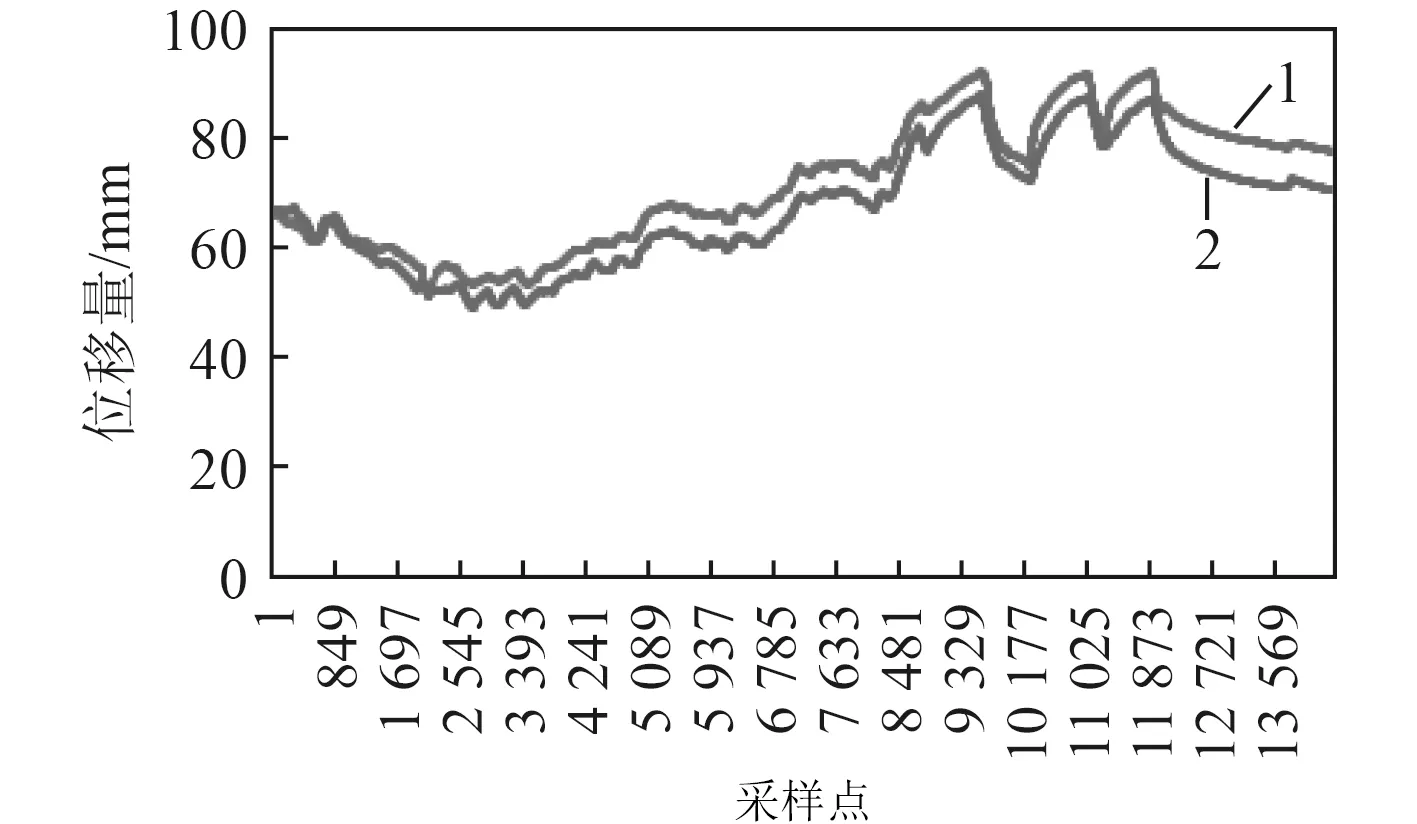
图6 波浪补偿前后的吊运机械臂位移量仿真Fig.6 Simulation of displacement of lifting manipulator before and after wave compensation
3 结语
船舶吊运机械臂的稳定性对于货物与船体的安全十分重要,因此,在进行船舶吊运机械臂设计时,有必要考虑船体的波浪补偿控制。本文介绍吊运机械臂的力学特性,建立一种六自由度运动补偿机制,针对系统的电机控制引入PID 控制技术,取得了良好的效果。
猜你喜欢
军事文摘(2022年19期)2022-10-18 09:54:54
学苑创造·A版(2022年4期)2022-06-18 11:22:44
幼儿园(2021年13期)2021-12-02 05:13:54
小读者(2021年2期)2021-11-23 07:17:34
书香两岸(2020年3期)2020-06-29 12:33:45
当代陕西(2020年24期)2020-02-01 07:06:46
山东冶金(2019年2期)2019-05-11 09:12:26
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
橡塑技术与装备(2018年21期)2018-11-13 01:36:00
中国航海(2014年1期)2014-05-09 07:54:24
