基于跨域基站UUV 集群试验方法研究
2023-05-04 14:01陈彦勇王少东周永进
舰船科学技术 2023年5期
陈彦勇,杨 芳,王少东,胡 婷,周永进
(中国船舶集团有限公司第七〇五研究所昆明分部,云南 昆明 650102)
0 引 言
UUV 技术日渐成熟,所实现任务难度和复杂度也在不断扩展,但单一UUV 很难满足应用需求的发展,UUV 以集群的形式互相协同执行任务成为水下无人潜航器发展的必然趋势,特别是面向多样化作战任务时,异构无人装备的协同运用才能充分发挥体系作战效能[1]。
UUV 集群协同的特点:
1)低成本、高度分散满足功能需求;
2)具有分布式集群智慧,采用分布式投票,正确率更高;
3)可实现信息共享;
4)分布式探测方式,主被动探测效率和精度大大提高;
5)分布式立体攻击,可有效提高整体打击效果;
6)互为中继,可缓解水下通信难题;
7)可形成自愈合动态网络,抗故障与自愈;
8)UUV 间相互配合,智能化程度高,获取信息量丰富,能够使水下战场更加透明,控制区域可向前推进上百千米[2]。
UUV 集群的难点[3]:
1)解耦问题。用非线性控制理论研究多航行器系统,难度很大,现有的多UUV 协调控制研究多基于线性模型。
2)弱通信约束条件。水下通信环境非常恶劣, 存在通信延迟、数据丢包、通信带宽受限和水下信道不稳定等约束条件。
3)异构。现有的多UUV 协调控制研究大多是同构的多UUV 系统, 各UUV 有相同的动力学模型,装备有相同的载荷,智能化相同,任务基本相同,这与水下无人系统作战差别是很大的。
随着多UUV 协作系统在水下作战领域的广泛应用,构建协调、高效的水声通信网络成为当前关注的焦点[4],其中UUV 集群试验的核心就在于水下组网,通过水下网络,实现各UUV 之间的通信、互定位、信息与数据的交互、状态上报与指令的传达、有人/无人控制等。但由于无线电和光波在水中快速地衰减和发散,水声通信的传播速率低(大约1 500 m/s)、带宽窄、存在多途干扰,给UUV 的水下使用和试验带来极大困难,与地面或水面无人系统集群使用和试验相比,存在很大的差异,比陆地和水面无人系统试验困难得多,保障及费用也高很多,重复试验的难度大。多数研究局限于理论推导和仿真验证,相关理论和算法难以得到实际验证。因此,探讨简单有效易实现的试验方案,就显得极为迫切。
本文通过探讨基于跨域基站UUV 水下组网及跨域通信、中继与定位等,实现水下集群任务规划、遥控,以及协同工作和控制,为了验证集群协同探测和攻击,在U U V 上加装鱼雷自导装置,并解决了UUV 平台加装鱼雷自导装置所必须的信息控制、跟踪弹道设计、低速下检测与跟踪参数确定、跟踪与攻击策略等技术。
1 试验方案的提出
1.1 基于跨域基站水下组网
试验方案的第一步,是构建水面水下跨域通信网络。水下无人系统集群试验需要的信息联络节点有:岸基控制中心、集群控制系统(陆地或搭载平台)、各UUV、跨域基站。根据需要,也可以包括模拟目标和监视(听)节点。信息链路示意如图1 所示。
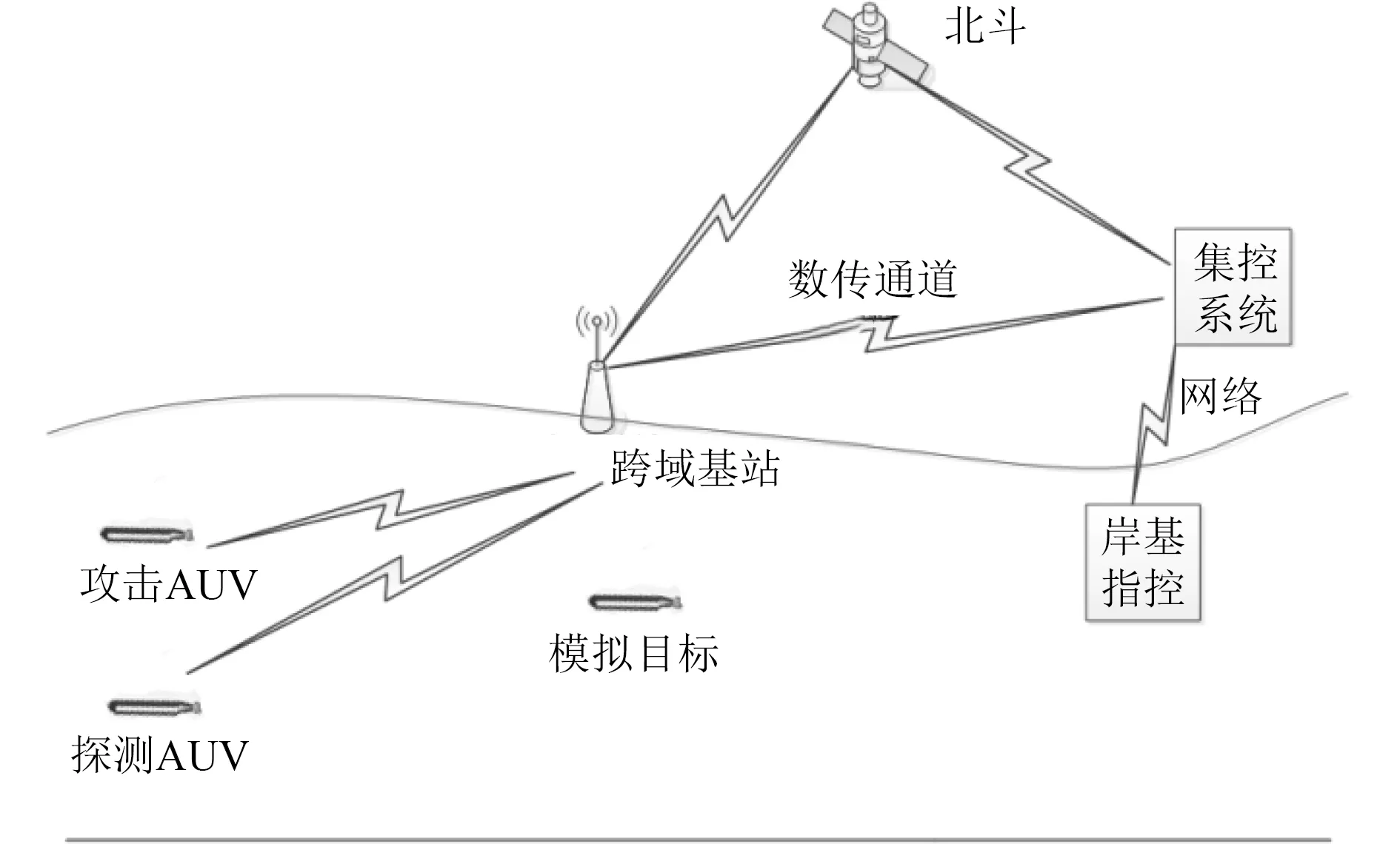
图1 集群各节点信息链路示意图Fig.1 Schematic diagram of information link of each node of the cluster
水面使用北斗及无线通信方式进行组网,由各UUV 直接与水下集群控制系统进行通信;水下使用水声通信方式进行组网,各UUV 水声信息由跨域基站转换为无线通信信息发送给水下集群控制系统。岸基控制中心与集群控制系统以及跨域基站均通过卫星和无线电进行通信。
水下组网可采用Kafka 架构,集群控制系统作为controller,跨域基站为Zookeeper,UUV 为Broker。这样的架构具备灵活伸缩、动态扩展的优点。在Kafka架构下,各UUV 节点(Broker)周期地给跨域基站(Zookeeper)发送状态报文,申明工作状态;集群控制系统(controller)进行群组工作任务管理,由跨域基站将接收的UUV 信息发送给集群控制系统,集群控制系统完成消息处理后将任务管理信息发送给跨域基站,跨域基站将消息发送给各UUV 节点;跨域基站进行群组节点管理,所有UUV 节点通过跨域基站通信,跨域基站将节点建档,新进入的节点只需遵循通信协议自动完成节点注册及通信,如图2 所示。

图2 集群Kafka 架构示意图Fig.2 Schematic diagram of cluster Kafka architecture
1.2 集群探测与协同方案设想
最简单的试验方案水下节点包括探测型UUV、攻击型UUV、跨域基站、模拟目标。各节点态势与运动如下:
1)模拟目标从西往东匀速航行;
2)探测型UUV 从西南方向往西北方向航行,初始角度设定根据目标探测要求设置。UUV 发现目标后,将目标信息发集群控制系统,集群控制系统转发攻击型UUV;
3)攻击型UUV 从南往北航行,并低速航行保持水声通信状态。收到集群控制系统或岸基指控中心攻击指令后,自行对目标搜索并攻击。
各UUV 与跨域基站态势如图3 所示。
1.3 方案仿真
根据试验初步方案,针对UUV 目标探测和攻击要求,进行仿真模拟。
仿真场景模拟运动目标以大地坐标(0,4 000)为起点,以某一速度航向为90°匀速直线运动,探测型UUV 距目标约2 000 m,以3 m/s 速度航行,发现目标后通过水声通信通知攻击型UUV 执行攻击。目标发现来袭UUV 时机动规避,先以某加速度加速并以某角速率逆时针转弯,高速逃逸,运动方向转到30°航向时匀速直线运动;攻击型UUV 低速搜索目标,发现目标后高速按尾追弹道攻击。
水下无人平台声呐作用距离按声呐方程求得。
图4 为仿真得到的UUV 集群攻击目标弹道图。
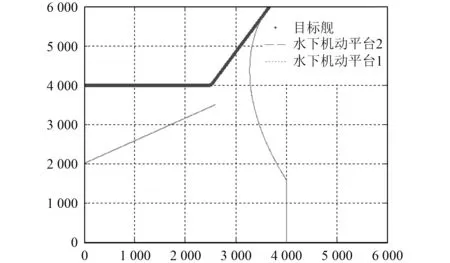
图4 机动目标跟踪态势Fig.4 Maneuvering target tracking situation
仿真结果表明,方案成立,能较好地保证协同探测和攻击概率。
2 跨域基站与集群控制
2.1 跨域基站
跨域基站正常通信,是保证试验成功的核心。跨域基站采用投放式无动力浮标,试前投放在预定位置,试验过程中通过水声通信与UUV 通信,通过无线数据传输电台经由通信控制台与水面基站通信,从而实现水面基站与水下UUV 间的指令和数据交换。
跨域基站顶端配置数据传输天线、航标灯及北斗模块,由浮标塔进行支撑,浮标体上盖与下浮体共同组成水密舱,为跨域基站提供正浮力和电子器件搭载平台。其中上盖安装有用于开关、充电接口、电缆连接器等功能的水密接插件,水密舱体内配置安装控制模块、水声遥控指令发射接收机、电池模块、电源模块、通信与示位组件、数字量网络输出模块、继电器及散热片、数传电台等功能模块,水密舱体下安装尾管及压重,下端挂载水声通信换能器。
2.2 水下集群控制系统
水下集群控制系统主要用于对水下无人集群工作网各节点的遥控、工作状态监控、集群任务仿真规划以及与岸基网信息交互,指挥水下各节点完成探测、协同、攻击等工作,实时显示各节点状态,并将水下信息实时上报给岸基网。
水下集群控制系统由笔记本电脑、交换机、串口服务器、数传设备、卫星通信设备、控制中心软件等组成。
水下集群控制系统通过交换机与数据传输设备、卫星通信设备等进行连接。控制中心对接收到的数据进行解析并实时显示。遥控命令通过数据传输设备发送给跨域基站,基站将命令转发给探测型UUV 和攻击型UUV。
3 试验实施
3.1 试验过程需要考虑的问题
1)跨域基站的布放,应根据各节点无线电和水声通信的距离要求、通信拉距试验的结果,合理布放跨域通信基站的位置,并充分考虑其在试验过程中的漂移,防止因通信中断导致试验失败;
2)各节点时钟对准和同步;
3)水声互扰问题;
4)各UUV 浮起点设计,防止产品碰撞。
3.2 集群控制系统与各节点协议构架
集群控制系统信息交互分为水面与水下模式。水面模式由控制系统通过数据传输或卫星与各UUV 和跨域基站进行信息交互。水下模式由跨域基站将各UUV 的水声信息转换为无线通信与控制中心进行信息交互。信息交互框图如图5 所示。

图5 信息交互框图Fig.5 Information interaction block diagram
3.3 信息交互方式
探测频率与水通频率是否存在干扰,试验前没有试验验证,为确保试验成功,采用统一的分时通信协议,由集群控制系统发送命令给各UUV 和跨域基站,各UUV 按周期通过跨域基站回复工作状态信息。
水下多节点网络多地址通信协议在考虑水下多节点组网通信干扰、UUV 自导发射信号对水通通信干扰情况的同时,满足UUV 自导探测需求;采用水下节点分时工作机制,将工作时间以对时为起点进行周期通信,通信周期再进行划片,保证同一时间内,只有一个节点进行通信与探测,解决节点间相互干扰的问题。采用跨域基站把水下通信信息转为无线通信数据发送给指控中心,使得指控中心可以实时监控水下各节点运行状态,也能实时控制水下UUV 完成协同任务。
3.4 试验流程
试验流程如表1 所示。试验前,应规划好试验流程,确定各岗位职责,通信方式与口令,应急处置策略等,并形成任务书发放各岗位,确保试验有序进行。

表1 试验流程Tab.1 Test process
4 讨论与结论
通过仿真试验和湖上验证试验,验证了本文提出的基于跨域基站水下多UUV 组网与协同试验方案的可行性,能够通过水下集群控制系统控制,实现水下集群任务规划、协同工作的集群信息链、水下探测与水下攻击协同控制等功能,比较好地跟踪到了目标,验证了探测与攻击协同效果。
本方案也可以用于UUV 协同探测试验,也可以通过增加UUV 节点数进行试验,但跨域基站通信方案和声学互扰可能会带来更大难度,需要做进一步改进。各UUV 均具备跟踪打击功能时,或增加攻击型UUV数量时,则可以采用“分布式杀伤”方案进行试验。
通过湖上实航试验,在水声通信距离、各水通频率干扰、水通与探测频率互扰、分时控制等方面得到一定解决,但还存在很多问题,弱通信或通信延迟等,也有待于进一步的考虑和研究。
猜你喜欢
系统仿真技术(2022年4期)2023-01-17
北京航空航天大学学报(2022年8期)2022-08-31
读报参考(2022年1期)2022-04-25
科学家(2021年24期)2021-04-25
军事运筹与系统工程(2019年4期)2019-09-11
电子制作(2018年11期)2018-08-04
中国交通信息化(2017年3期)2017-06-08
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
知识就是力量(2017年2期)2017-01-21