自动调节远近光灯的设计与研究
2023-04-21 12:12李晶胡凯巫祎博漆雪丽张罡肇
时代汽车 2023年8期
李晶 胡凯 巫祎博 漆雪丽 张罡肇

摘 要:由于夜间、雨雪天等环境下,司机驾驶时能见度往往大幅降低,从而对行车安全问题造成极大影响。驾驶员在驾驶中主要依靠车前的大灯识别路况,但是驾驶员在驾驶过程中容易忽略远近光灯的切换,不仅导致驾驶员无法了解前方路况,也会干扰对方车辆对路况的判断。针对汽车驾驶过程中由于光线不足或驾驶员对灯光操作不当等因素引起的交通事故问题,本文设计了一种可自动调节的远近光灯。该设计选用测距传感器、光线传感器、车辆速度传感器、测线速传感器和颜色识别等传感器,通过信息采集对灯光进行自动控制,可避免驾驶员因主观判断失误和操作不当等人为因素出现灯光切换问题,从而引发的安全事故。
关键词:自动控制 远近光灯 传感器 安全
Design and research of automatic adjusting high and low beam lamp
Li Jing Hu Kai Wu Yibo Qi Xueli Zhang Gangzhao
Abstract:Due to the night, rain and snow conditions, the visibility of drivers is often greatly reduced when driving, which has a great impact on driving safety. The driver mainly relies on the headlights in front of the car to identify the road conditions, but the driver tends to ignore the switching of the high and low beams during driving, which not only causes the driver to fail to understand the road conditions ahead, but also interferes with the judgment of the other vehicle's road conditions. Aiming at the problem of traffic accidents caused by factors such as insufficient light or improper operation of the light by the driver during driving, this paper designs an automatically adjustable high and low beam. The design uses sensors such as ranging sensor, light sensor, vehicle speed sensor, line speed sensor and color recognition to automatically control the light through information collection, which can avoid the driver's subjective judgment error and improper operation. problems, resulting in security incidents.
Key words:automatic control; High and low beam lamps; Sensors; security
1 引言
據数据统计表明,超过80%的交通事故发生在恶劣、黑暗的天气,大约70%车辆事故发生在夜间,死亡率超过40%,夜间发生交通事故的概率要比白天高出1.5倍。致使夜间交通事故发生的的主要原因有光线差、驾驶员未正确使用前照灯等。因此,提高驾驶员夜间行驶的安全性具有一定的研究价值,也有大量学者对汽车远近光灯的自动控制进行了研究[1-4]。
樊海红,郑志强,林景东[5]通过信号采集处理设计了前照灯自动切换远近灯,但未考虑车辆夜间行驶时远光灯照明距离对驾驶员的影响。吕光辉,张忍[6]应用超声波雷达测距仪和速度传感器为汽车大灯提供了更加完善的设计方案。邹祖军,冯进良,郭奕辰[7]等学者采用坡路检测系统对上下坡路进行处理,从而控制汽车远近光灯,实现自动切换。杨明俊[8]等以丰田普瑞维亚为研究对象,建立了AFS前照灯转角数学模型,通过计算机仿真,分析了汽车方向盘的转角变化率、前照灯转角滞后量和汽车车速之间的关系,以及前照灯转角配合方式和汽车动态配光光型之间的一些数据相关性。顾卜亮[9]首先选用光敏电阻传感器检测了光的强弱,再选用超声波传感器将接收到的信号转换为电压信号,最后通过选用MSP430F5529单片机对远近灯光切换进行自动控制。李玖详[10]总结分析了各研究者对汽车自动切换远近光灯的设计,并提出了不足。本研究考虑了驾驶员夜间实际行驶状态对汽车车灯进行了设计研究。如:考虑了光线强度条件、会车条件、超车条件、会车车速条件、会车车距条件等。
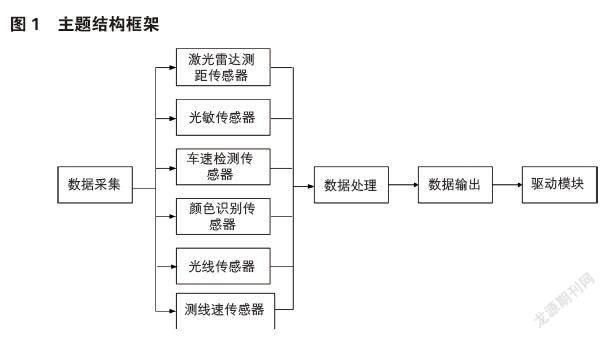
2 主体结构
自动调节远近光灯通过数据采集、数据处理、数据输出和驱动模块四部分组成。数据采集,主要通过激光雷达测距传感器、光电三极管模块、车速传感器等进行数据采集。数据处理,通过采集后的数据输入主控电路板,进行数据编译和处理。数据输出,将主控电路板编译处理后的数据进行分析并输出至驱动模块,驱动模块将接受到的信号进行实体化转换,实现自动调节远近光灯的功能。主题结构框架如图1所示。
3 工作原理
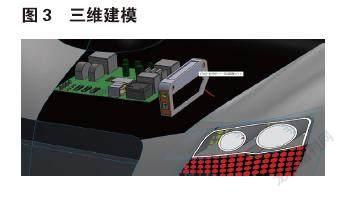
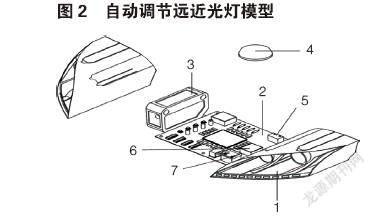
本文设计的自动调节远近光灯,采用激光雷达测距传感器3,且测距范围为0.1m-110m,通过激光雷达测距传感器对汽车前方的车辆或行人进行检测,当检测范围内有车辆或行人时,自动从远光灯切换至近光灯;当驶过车辆或行人时自动从近光灯切换至远光灯,防止干扰其他车辆或行人的视线,自动化程度高,保证车辆和行人的安全。光敏传感器6采用光电三极管模块,且光线传感器4安装在汽车外,光线传感器4采集外部环境的照明情况,判断外界照明情况是否良好;通过主控电路板2与汽车的速度传感器电连接的设置,能实时检测车辆速度,并根据车辆速度来判断汽车大灯1的开启状态,车辆环境照明不足且车速大于60km/h时,主控电路板就会控制汽车大灯1自动打开远光灯,让车主获得更好视野,车辆环境照明充足;车速小于40km/h时,系统的远光灯就会自动关闭。通过光线传感器4检测隧道状况以及夜间行驶道路路灯状况数据采集,通过颜色识别传感器5采集十字路口等不规则路口处有无红绿指示灯状况。通过测线速传感器7检测对向来车时车辆速度,实时检测对向车速,提供数据传输处理模块,对远近光切换进行判断处理,预防因无法判断对方车辆速度,从而造成长时间车身灯光使用错误,无法提前了解路况。自动调节远近光灯模型如图2所示,三维建模如图3所示。
4 元器件选用
4.1 Arduino模块
Arduino通过传感器感知环境,控制灯光等装置来反馈、影响环境。Arduino的编程是通过Arduino编程语言(基于Wiring)和Arduino开发环境(基于Processing)来实现的。
4.2 激光雷达测距传感器
激光雷达测距传感器以激光作为信号源,由激光器发射出的脉冲激光,打到对向车辆上引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理计算,得到激光雷达到目标点的距离。目前,广泛用于汽车的激光雷达传感器为新型毫米波雷达设备,具有更高的精度,该程序能跟踪行人,监测行人动向,更好地解决夜间道路行人问题,实现自动切换功能。
4.3 光线传感器
光线传感器主要是用来感应光的强度反馈的核心元件,通常由投光器和受光器组成。在投光器和受光器之间,光线受到遮蔽后会获得信号反馈,从而进行自动控制,达到自动切换远近光灯。本设计中主要应用于进入隧道、天气光线条件较差和夜间行驶中道路是否有路灯照明等情况下进行远近光自动切换。
4.4 车速传感器
车速传感器广泛应用电磁式和光电式,其主要作用是测试车辆车速,控制发动机变速器,变扭器锁止。速度传感器将速度数据传输给核心元件Arduino模块,经过核心元件编译处理后,将数据传输给驱动,从而进行远近光灯切换时长判断。
4.5 颜色识别传感器
颜色识别传感器设置在汽车前挡风玻璃工作臺处,识别通过路口时前方是否有交通信号灯,避免违反交通信号灯规则。根据交通管理规定,通过有无信号灯路口处,灯光正确使用。
4.6 测线速传感器
该传感器具有高精度的优点,可测量物体运行速度以及运行方向。基于可靠的空间滤波方法原理,通过光穿过的光栅的移动物体来实现。本设计选取此传感器是为了检测对向来车车辆速度,配合本车辆速度传感器检测后对自动切换灯光的速度以及时间长度的把控,从而达到本设计自动切换灯光目的。
5 切换分析
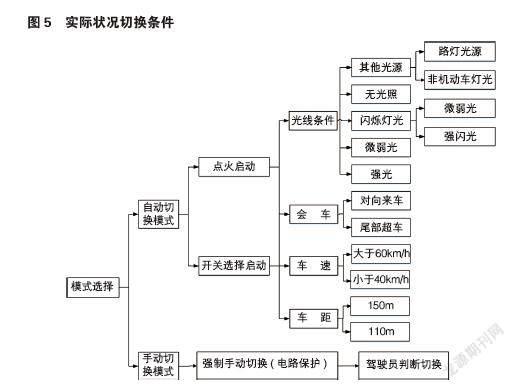
在夜间行驶时,采用自动切换模式和手动模式。自动切换模式为点火启动和选择切换,手动模式为强制手动切换,其切换过程中会采取切换电路保护灯光,该切换主要由驾驶员自主判断。在自动模式情况下,核心元件会根据光线条件、会车车速、车距、路口红绿灯状况、行人以及夜间道路是否有路灯照明及照明状况数据信号为条件进行远近光灯自动调节。实际状况切换条件如图5所示。
行人检测问题。激光雷达测距传感器具有跟踪行人、监测行人动向的作用,因此道路中有横穿道路的行人时,经检测自动切换近光,防止远光灯对行人造成目眩。
夜间行驶道路是否有路灯照明问题。光线传感器安装于车顶天窗部位,有路灯照明时车辆会根据光线传感器信号,检测路灯照明情况,使车辆自动调节为近光灯。无路灯照明时开启远光灯。其余传感器保持工作状态。
路口有无交通信号灯问题。按驾驶要求,在无交通信号灯路口,远近灯光交替使用,根据对路口相关交通指示牌进行信息收集,从而达到无交通信号灯路口进行自动远近光交替使用;在有交通信号灯控制路口,通过颜色识别器进行识别,自动调节为近光灯。
6 总结
本文设计了一种可自动调节的远近光灯。该设计选用测距传感器、光线传感器、车辆速度传感器、测线速传感器和颜色识别等传感器,通过信息采集对灯光进行自动控制,其结构设计合理,自动化程度高,提高了车辆行驶的安全性。
2021大学生创新创业项目训练计划项目(DC2111807CX888)——一种可自动调节远近光灯的研究;
2022年甘肃省高校创新创业教育教学改革研究项目(LGYCXG-22-02)——基于“专创融合”的材料力学课程教学改革研究;
2022年甘肃省高等学校创新基金项目(2022A-167)——双吸式离心泵在输送含沙水流下的流动及磨损特性。
参考文献:
[1]姚文俊,杨加东.基于STM32的汽车安全及灯光系统设计[J].南方农机,2020,51(05):154-156.
[2]杨冬英,贺江鹏.基于单片机汽车自动照明灯远近光设计与实现[J].山西电子技术,2019(06):36-38+42.
[3]王琮德.复杂环境下汽车远近灯光智能切换系统设计[J].科技资讯,2019,17(18):68-69.
[4]蒋攀,姚嘉祺,羊雨丹,郭永义.基于热成像原理的汽车远近灯光自动调节系统[J].科技与创新,2019(01):130-131.
[5]樊海红,郑志强,林景东.汽车前照灯远近光自动切换的研究[J].电子技术与软件工程,2018,(24):108-109
[6]吕光辉,张忍.基于单片机技术的汽车远近光自动切换装置的研究[J].汽车与配件,2013,(35):46-47.
[7]邹祖军,冯进良,郭奕辰,葛明达.汽车大灯远近光自动切换系统[J].仪器仪表用户,2011,18(03):20-22.
[9]杨明俊. 面向动态配光光型的汽车AFS前照灯转角控制方法研究[D].华南理工大学,2015.
[10]顾卜亮.智能汽车远近光灯自适应系统[J].电子测试,2022,36(06):14-15+20.
[10]李玖详.汽车远近光灯自动切换技术现状与发展趋势[J].农机使用与维修,2020,(07):43.
猜你喜欢
纺织科学研究(2021年1期)2021-12-03
装备制造技术(2021年4期)2021-08-05
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
电子测试(2018年6期)2018-05-09
铁道通信信号(2016年12期)2016-06-01
海峡科技与产业(2016年3期)2016-05-17