
基于YOLOv5s算法的风机叶片故障识别与检测
2023-04-14 21:08:50杜金张欣钰杨雅君王铮马亚杰宋美
电脑知识与技术 2023年6期
关键词:目标检测
杜金 张欣钰 杨雅君 王铮 马亚杰 宋美

摘要:风机叶片的故障是影响风力发电持续健康发展的主要问题,也隐藏着巨大的安全隐患与环境问题。为了对风机叶片进行故障检测,文章提出了一种基于YOLOv5s算法的风机叶片故障识别与检测的模型。使用无人机对某风场静止的故障风机叶片进行图像采集,在经过人工标注故障区域后,将训练集带入YOLOv5s进行训练。结果显示,YOLOv5s对比YOLOv4在风机叶片的故障检测效果上有较大提升,精度为90.2%,召回率达到93.4%, mAP值提升了3%,达到65.3%,在实现快速检测的同时兼顾了较高的准确率。
关键词:风机叶片;YOLOv5s;故障识别;目标检测;交并比
中图分类号:TP277 文献标识码:A
文章编号:1009-3044(2023)06-0076-03
开放科学(资源服务)标识码(OSID)
0 引言
风力发电作为发展最为成熟、最具有开发规模的可再生、清洁的绿色能源,拥有广阔的发展前景。风机叶片作为风力发电的重要承载部件,其是否安全运行直接影响着风力发电机组对风能的获取效率,同时对设备的使用寿命以及周围的环境安全有着巨大的影响。根据我国风能资源的分布,风力设备多分布在湿度高、气温低的沿海与高海拔地区。由于风机叶片制造中的铸造气孔、铸造砂眼以及叶片与上冠、下环肩的过渡角设计的缺陷[1],当叶片长期在恶劣的环境下运行时,容易发生叶片腐蚀、损坏、蒙皮剥离、叶片结冰、折断等故障。因此,对风机叶片故障检测进行研究对于减小经济损失和安全隐患具有重要的意义。
受技术的限制,目前我国对风机叶片的故障检测多使用人工检测或望远镜观测等传统检测方法。人工检测是高空作业,检测效率低、危险系数高,且适应复杂地势的能力差,不易满足风机长期检修的要求;而望远镜观测对设备的要求较高,且观测误差与主观性较大。无人机的快速发展与广泛使用为叶片故障检测提供了一种新的方法。无人机检测操作简单、检测成本较低、维修方便。将无人机装配高像素云台设备,利用红外、紫外成像传感器模块等定期拍摄风机叶片的照片,记录叶片的变化,可用于对风机叶片的长期检测[2]。
對于风机叶片照片中缺陷故障的目标确定、特征精确识别并提取、特征分类、消除冗余确定最佳目标范围是进行目标检测的核心步骤。神经网络对于时序特征的提取能力强、泛化能力相对较好,且能对特征的提取进行无监督的自主学习,在计算机视觉领域得到了快速的发展,成为了目前图像识别的主流技术。
基于SCADA系统、回归算法和深度学习等针对风机叶片的研究,已有众多论文发表。文献[3]基于 SCADA数据的故障预测技术,建立了多元数据融合的风机叶片结冰故障预测模型。文献[4]基于逻辑回归算法构造不平衡分类器,以根据SCADA 数据实现风机叶片结冰监测。文献[5]是运用栈式自编码网络建立叶片结冰早期预测模型实现了故障特征的自适应提取和状态分类,有效简化了传统预测模型的复杂度。文献[6]对风机叶片的原理进行分析,提出了振动方法研究叶片状态的建议。文献[7]基于三轴加速度传感器模型数据融合设计了数字信号处理技术振动监控系统,实现了叶片故障发生率75%的提前预测。文献[8]直接通过无人机获取叶片表面图像,对风机叶片表面的故障进行区域划分和缺陷问题分类。文献[9]介绍了一种基于深度学习的动车扫石器丢失故障图像识别方法,提高了检测效率和准确性。文献[10]利用无人机对电网进行巡检,将巡检的图像进行自动判读,基于深度学习对小样本的多目标缺陷检测与识别问题,提供了一种新的解决方法。
在考虑了风机运行的环境特征、技术限制和经济因素,仔细分析了无人机的主要构造以及飞行控制原理之后,制定出一套高效的风机叶片故障图像采集方案。本文针对现有算法参数量大、检测效率低的问题,基于YOLOv5s算法构建了实时监测风机状态模型,可大大提升故障检测准确率及效率。
1 风机叶片常见故障及数据预处理
由于地形和气候的影响,风机叶片会遇到不同的故障问题。通过无人机对风机叶片定期进行照片、视频的采集和记录,对原始图像进行处理之后,对数据进行预处理。
1.1 风机叶片常见故障
根据风机叶片受损原因和程度不同,将故障主要分为以下五大类:叶片受损、叶片结冰、表皮油污、折断。由于风机多在极端的天气下运行,叶片遭受着风沙、雨雪、暴晒、冰雹等腐蚀,容易出现表面裂痕和边沿开裂等叶片受损,如图1所示。因为风机多建立潮湿、低温的沿海和山区,叶片在此种环境中容易表皮覆冰,如图2所示。当风机运行出现故障时,其表面可能出现黑色油污,如图3所示。如果叶片受损之后没有得到及时检修,会加速叶片的老化,最终造成叶片折断,如图4所示。
1.2 数据预处理
与合作单位制定数据采集计划,使用无人机对某风场静止的故障风机叶片进行近距离安全区域多角度图像采集,获取约3000张足够清晰的图片及10段左右视频。对于采集到的原始图像进行人工筛选,划分为有故障图像集和无故障图像集,并对有故障图像集利用标记软件标注出故障具体位置与类别。将故障图像集按照7:2:1划分为训练集、验证集和测试集。
2 YOLOv5算法原理
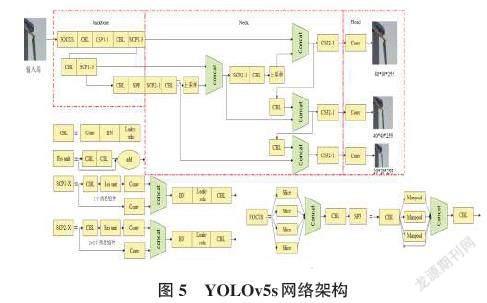
YOLO系列作为一种新的目标检测算法,它能够在实现快速检测的同时兼顾较高的准确率。YOLO将目标区域和目标类别的预测整合到单个神经网络模型中,利用整张图片作为网络的输入,直接在输出层回归目标的类别和位置信息。YOLOv5为了解决目标识别中效果较差的问题,对比于YOVOv4,主干网络依旧使用CSPDarkNet,但在基准网络中新增Focus结构,将多个slice结果Concat起来,然后将其送入CBL模块中。对比于YOLOv3,输出端采用Mosaic数据增强方式,将原始数据按照随机缩放、随机剪裁和随机排布的方式进行拼接而成,在丰富数据集的同时,大大提升了数据的训练速度,增强了鲁棒性。以YOLOv5s为例,其目标检测网络架构可分为四个部分:输入端、基准网络、Neck网络和Head输出端。其网络架构如图5所示,其中CBL、Res unit、SCP1-X、SCP2-X、FOCUS模块操作如图5所示。
YOLOv5s的输入端表示要输入的图片。该网络输入大小为608×608的图像后,对其进行归一化等操作。在网络训练阶段时,YOLOv5s使用Mosaic数据增强操作来提升模型训练速度和网络精度,并通过自适应锚框计算和自使用图片缩放进一步提升算法的训练速度。
YOLOv5s在CSPDarknet结构基础上,新增Focus结构作为基准网络,通过slice操作来对输入图片进行裁剪,进一步提取一些通用的特征表示。
YOLOv5s在Neck网络中依旧使用FPN+PAN结构,相较于YOLOv4在Neck结构里普通的卷积操作,YOLOv5s采用借鉴CSPnet设计的CSP2结构,利用CSP2结构代替部分CBL模块,从而加强了网络特征的融合能力。
YOLOv5s的Head输出端用于完成目标检测结果的输出,利用GIOU_Loss来代替Smooth L1 Loss作为Bounding box的损失函数,从而进一步提升算法的检测精度。
3 实验结果与分析
3.1 实验训练环境与训练方法
本次实验的运行环境如下:CPU为Intel i7-9750H,GPU为NVIDIA TITAN Xp,内存为32 GB,操作系统为Windows10,安装CUDA11.1、cuDNN 8.0.5与tensorrt7.2.2.3库文件,开发语言为Python3.8,Pytorch1.8.0框架。
在模型训练过程中,由于数据大小适中,为避免过大的Bach-size降低训练的随机性,导致模型陷入局部最优的情况。所以将Bach-size调整为5来增强模型的泛化性。设网络训练的初始学习率为0.01,权重衰减设置为0.0005,迭代次数为400。采用随机梯度下降优化器设定动量因子为0.937,其余参数根据YOLOv5团队开发的超参数文件hyp.scratch.yaml默认。
3.2 模型评价指标
选择的目标检测模型的参数评估指标主要有mAp值,精度(Precision)和召回率(Recall)。一般训练结果主要观察Precision、Recal波动情况,然后观察mAP@0.5:0.95 评价训练结果。
1)Precision:精确率,指正确预测的结果数占所有预测为正样本的比率, [11]其公式如下:
[precision=TPTP+FP]
其中TP指将正类预测为正类数目[11] 。FP指将负类预测为正类数目[11] 。
2)Recall:召回率,指预测正确的结果数占真实结果总数的比例[11],其公式如下:
[recall=TPTP+FN]
其中FN指将正类预测为负类数目[11] 。
3)mAP:所有数据的所有种类的平均精度的平均值[11]。其计算公式如下:
[mAP=i=1CAPiC]
其中,AP指单类别精度均值,而mAP@0.5:0.95表示在不同IoU阈值(从0.5到0.95,步长0.05)上的平均mAP。
4)IoU:交并比,指的是ground truth bbox与predict bbox的交集面积占两者总面积的一个比值,IoU越大,说明检测框的效果越好,通常认为IoU>0.75,检测效果良好。
3.3 算法性能分析
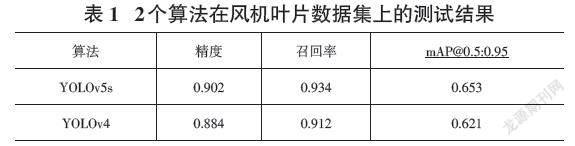
为了量化本文基于YOLOv5s算法的实时监测风机状态模型的性能表现,本文将YOLOv5s、Yolov4检测算法在实时监测风机状态任务上的性能进行比较,2个算法在同一个风机叶片数据集中的检测性能比较结果见表1。
由表1可以看出,在同一个风机叶片数据集上进行训练和测试,本文使用的YOLOv5s的精度为90.2%、召回率为93.4%、Map@0.5:0.95为65.3%,3个指标均高于YOLOv4检测算法。
3.4 结果展示
针对基于YOLOv5s算法的实时监测风机状态模型训练结果如6所示。在叶片折断、叶片表面受损两种情况下,交并比(IoU)均在0.80以上,检测效果良好,满足未来实际应用需求。
4 结束语
本文基于YOLOv5s提出了对风机叶片的实时监测模型,对目标检测网络架构中的基准网络、Neck网络进行改进,提高了目标识别的有效性,同时提高了数据的训练速度以及鲁棒性,在实现对风机叶片快速检测的同时,兼顾了较高的准确率,对于风机叶片的实时监测具有重要的现实意义。
参考文献:
[1] 刘晓波,林家国,王依.基于小波包分析的风机叶片裂纹故障识别研究[J].机床与液压,2007,35(9):241-243,245.
[2] 贺斌,贾建华,赵峰,等.无人机在风机叶片检测中的应用[J].电工技术,2019(13):64-65.
[3] 池昊,彭成,贺婧,等.基于SCADA数据的风机叶片结冰短期预测方法[J].信息与电腦(理论版),2019(4):61-65.
[4] 李宁波,闫涛,李乃鹏,等.基于SCADA数据的风机叶片结冰检测方法[J].发电技术,2018,39(1):58-62.
[5] 刘娟,黄细霞,刘晓丽.基于栈式自编码网络的风机叶片结冰预测[J].计算机应用,2019,39(5):1547-1550.
[6] 赵立明.风机叶片故障预测的振动方法研究[J].内蒙古科技与经济,2018(2):99.
[7] 张保钦,雷保珍,赵林惠,等.风机叶片故障预测的振动方法研究[J].电子测量与仪器学报,2014,28(3):285-291.
[8] 彭麟.基于无人机获取图像的风机叶片表面故障的检测与分析[D].上海:上海电机学院,2019.
[9] 于婷.一种基于深度学习的动车扫石器丢失故障图像识别方法:CN112183323A[P].2021-01-05.
[10] 顾晓东,唐丹宏,黄晓华.基于深度学习的电网巡检图像缺陷检测与识别[J].电力系统保护与控制,2021,49(5):91-97.
【通联编辑:唐一东】
猜你喜欢
科技创新与应用(2016年36期)2017-02-21 18:48:01
软件(2016年4期)2017-01-20 09:38:03
科教导刊·电子版(2016年28期)2017-01-10 22:25:23
科学与财富(2016年28期)2016-10-14 23:45:18
无线互联科技(2016年7期)2016-05-30 13:57:06
电脑知识与技术(2016年5期)2016-04-14 13:48:16
科技视界(2016年4期)2016-02-22 13:09:19
哈尔滨理工大学学报(2015年5期)2016-01-19 18:06:12
湖南大学学报·自然科学版(2015年10期)2015-11-30 18:52:07
现代电子技术(2015年20期)2015-10-26 22:48:16
