
诺力物流系统平台型“未来工厂”的建设与创新
2023-04-05 04:14王玉
物流技术与应用 2023年2期
文/ 本刊记者 王玉
诺力通过物流系统平台型“未来工厂”建设,实现全流程、全周期的智能化、精细化制造,极大提升了产业供给能力和柔性化制造能力。其中智慧物流项目建设极具亮点,“智能仓储”、“精准配送”两大物流场景已经入选工信部发布的“2022年度智能制造优秀场景公示名单”,为制造企业工厂智慧物流建设带来了成功经验。”
诺力智能装备股份有限公司(原名浙江诺力机械股份有限公司,以下简称“诺力”),由成立于2000 年的长兴诺力机械有限责任公司整体变更设立,于2015 年在上交所A股主板上市。
20余年以来,诺力通过不断的技术创新和有计划的规模扩张,发展成为能够同时提供物料搬运设备、智能立体仓库、智能输送分拣系统、AGV及其系统、供应链综合系统软件以及智能制造全系统整体解决方案的公司;其装备制造能力居行业翘楚,轻小型工业车辆更是连续17年市场占有率领跑全球,电动仓储叉车销量在国内领先。
面向制造业高质量发展的新需求,诺力打造了物流系统平台型“未来工厂”(以下简称“未来工厂”),其中“智能仓储”、“精准配送”两大物流场景已经入选工信部发布的“2022年度智能制造优秀场景公示名单”,为装备制造企业的数字化、服务化、集成化发展提供了成功经验。
一、“未来工厂”规划与布局
诺力“未来工厂”项目位于浙江省湖州市长兴县中央大道1888号,建设时间为2019年1月至2021年12月,总投资2.01亿元,其中设备投资(包含软件)1.61亿元,2021年底已全面投产。
诺力物流系统平台型“未来工厂”,是以物流中心化的规划设计理念,意在打造“物流搬运设备生产智造链”,通过“未来工厂”建设,实现全流程、全周期的智能化、精细化制造,极大提升产业供给能力和柔性化制造能力。项目建设包括了智能金工车间建设、智能焊接车间建设、智能喷涂车间建设、智能总装车间建设、智能物流与仓储建设、数字化研发协同平台建设、智能化生产管控系统建设、供应链协同平台建设、绿色制造与新一代绿色技术建设等九大建设内容,通过软硬件的集成建设,形成了数字驱动的智能工厂,由3座自动化立体仓库、38台物流移动机器人组合而成自主智能物流整体解决方案,八大系统集成(ERP、PLM、MES、WMS、SCADA、CRM、SCM、远程运维系统)形成“诺力数字大脑”,引入标准流程,从而实现数字化设计、智能化生产、智慧化管理、协同化制造、绿色化制造、安全化管控,具有行业领先的集成化水平。

诺力物流系统平台型“未来工厂”

自动化立体仓库
“未来工厂”采用大厂房通体布局设计,针对柔性生产模式建立各生产单元。产线布局随物料流转呈S型布局,具体包括板材下料生产线、数控机加生产线、槽钢下料生产线、门架及车架自动化焊接线、总装自动化生产线;并建设半成品立体仓库、外购件立体仓库、涂装立体仓库和成品库。同时在各主要产线线边设置物料缓存区,如焊接二次配套区,喷涂上线缓冲区,总装线边标准件库等。从立体仓库到线边的物料转运全部采用AGV小车运送。
此生产工艺布局优化厂内物流走向,在有限空间下最大化缩短物料配送和在制品流转时间;同时缩短AGV运输距离,保证效率,避免路径冲突;原材料入厂口和成品出厂口有效分离,保证运输效率。
下面将聚焦“未来工厂”中的智慧物流规划与建设,重点介绍总装生产线的“精准配送”、工厂的智能仓储与物流,以及工厂智能物料管理系统、供应链协同平台四大核心内容,以及对项目创新性、关键技术突破、应用价值等内容进行总结。

诺力“未来工厂”整体规划图

诺力数字大脑整体实施方案

诺力“未来工厂”整体建设方案
二、总装产线的“精准配送”
总装自动化生产线主要用于物流搬运设备的装配,实现了无人化作业(由AGV车辆灵活组合而成,实现工作流自动化)、智能生产管控(与MES系统完美对接,物料精确配送)、智能监控与柔性生产(建立在线检测设备,机器人辅助装配)、产品全周期管理(螺栓拧紧数据可保存,可追溯,可传输)。
自动化生产线采用背驮式AGV;装配作业且工位之间通过AGV自动转运的柔性生产方式;物料自动配送采用AGV+托盘的形式,对装配工位的物料进行按需、按周期自动配送;装配工装(不同的工件都统一配置工装方便转运与装夹,工装与AGV固定连接);每个人工装配工位配置动态电子作业指导、扫描枪;搬运车上件与翻转工位采用ABB 6关节机器人作业;装配后需要检查的质量点都在装配工位设置激光测距检查、图像传感器(CCD);在返修区设置缓存工位,当主线有工位不能按节拍要求完成时,需转运至缓存工位,保证主线的顺畅;整车装配检测完成后通过人工转运包装线,完成整车的包装。
其中,背驮式AGV可实现向前移动、左右转向,可沿任意曲线连续运行,全方位高效灵活移动。可应对各种复杂路面,室内室外行驶平稳。定位精度可达±10mm;使用寿命长;极具安全性和可靠性;车轮结实耐用,承载能力强,不损伤地面。
AGV可按生产节拍需要设定同步运行和步进运行两种运行模式,亦可采用全自动/手控的运行控制方式。速度调节范围为0~10m/min;AGV前端配置进口的红外防撞传感器和故障声光报警装置,轻触式机械防碰装置及进口的行程开关。
三、智能仓储与物流系统

总装自动化产线

自主研发的5G+AGV作业场景

AGV在生产线的应用场景
物流搬运设备的智能制造,需要大量的原材料、外购件、生产部件、工艺装备的存储。除原材料、焊料、油品采用以上平库仓储出库调度流程外,针对外购件、外协件、组装部件等建设3座自动化立体仓库,实现了各类物料自动化仓储作业,应用自主物料搬运机器人,进行收货入库到转运上架、线端配送到自动化立体仓储等内部各个环节的物料搬运、转移等操作。
主要运作流程如下:
1.半成品库出入库
机加半成品(或空托盘)需要入库时,叉车AGV把货物直接放置在入库口的输送机上,外形检测合格后直接输送到入库方向的输送机上进行入库,外形检测不过关的货物直接退回入库口进行人工整理再次入库;当半成品(或空托盘)需要分拣或直接出库时,堆垛机把货物直接输送到出库口或分拣台。此时工业车辆根据出库口的显示屏的提示,把货物运送到相应位置。(参照图1)

图1 半成品库布局示意图
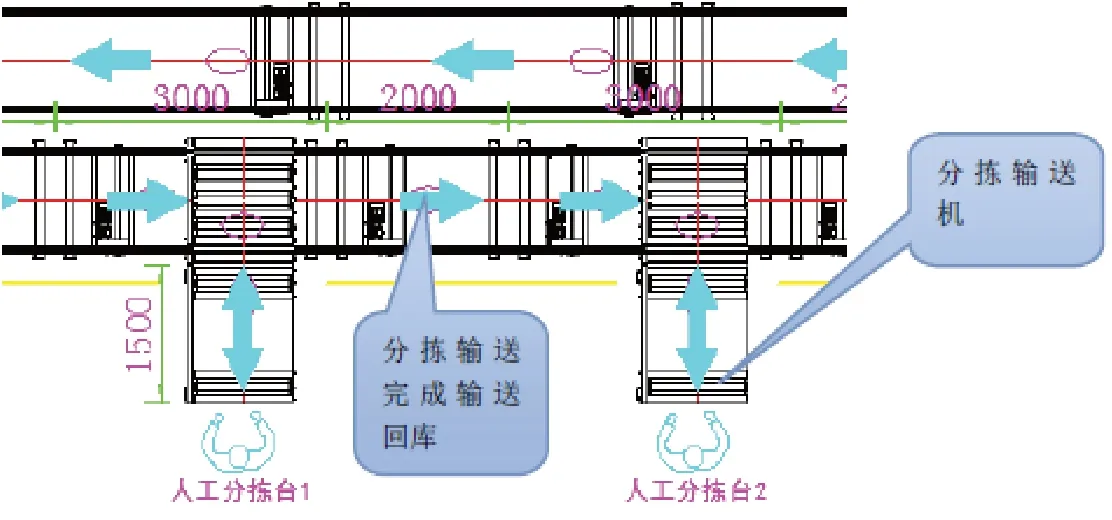
图2 货物分拣示意图
2.外购件库出入库
外购件库的出入库作业,与半成品库出入库作业流程基本相同。(参照图3)

图3 外购件库出入库示意图
3.涂装库出入库智能化
当货物(或空托盘)需要入库时,叉车把货物直接放置在入库口的输送机上,外形通过检测合格后直接输送到入库输送线上,经过输送机到达堆垛机进行入库,当外形检测不过关的货物直接退回入库口进行人工整理再次入库。
当半成品(或空托盘)需要出库或分拣时时,堆垛机把货物直接输送到出库口输送机上,然后通过穿梭车直接转运到出库口的输送机上,需要直接出库的货物,工业车辆根据出库口的显示屏的提示把货物运送到相应位置。(参照图4)

图4 涂装库出入库布局
四、工厂物料管理系统与数字化协同平台
1.智能物料管理系统
“未来工厂”的智能物料管理系统集成应用了MES、ERP、WMS、APS等各类系统软件,实现了正常物料的精准、高效管理。物料管理流程,如图5。

图5 “未来工厂”物料管理流程示意图
通过MES系统物料管理顺畅化完成生产领料、半成品完工入库环节。
下料、机加生产环节从ERP系统领取物料,生产完工后与WMS系统交互入半成品库。
焊接所需物料由MES系统负责的焊接二次配套区分拣配送,焊接完成后进行焊接打标标识并对焊后缓冲区物料进行管理,喷涂过程中根据物料上线顺序进行编码绑定,并在喷涂下线后进行重新打码,入WMS管理的喷涂半成品库。
部装生产所有物料实现打码标记,并入WMS系统管理的外购件库。
装配生产环节根据订单物料齐套状况由各库房进行物料配送,同时MES系统负责管理线边标准件叫料管理,产品装配完工后下线打码放置在成品完工区,同时通知ERP入成品库。
由“鸟翼上系上了黄金,这鸟便永不能再在天上翱翔了。”通过类比推理的三个过程,得出结论:“人的身心被贪欲所束缚,这个人便永不能在人生的道路上轻装前行了。”这个结论也可以扩展为:对财富的贪欲,使人失去了自由。
针对订单所需库存物料无法进行物资锁定,系统规划订单物料齐套原则。判读订单物料齐套时计算各物料的实际可用量。
高级计划与排程系统(APS)运行时需首先判读当前订单物料是否齐套,即将领用的物料量与实际可用量进行比对,如满足需求即可将生产计划排产下达。当订单物料真实出库后,同时对现有库存量和领用量进行变更。此外,当ERP生产计划变更时,也要同步释放被占用的库存。(参照图6)

图6 高级计划与排程系统管理
2.供应链协同平台
为了解决供应商沟通周期长、采购管理滞后、对账数据更新慢、不能协同管理、数据无法共享等痛点问题,“未来工厂”建设产供销资源集成平台,通过云上产业链,实现制造资源的动态分析和柔性配置。建立“高质量、高效率、高效益、可持续”供应链系统,支撑企业供应链业务需求。兼顾整个供应链资源整合、优化,可持续降低采购成本,高效处理采购业务,实现降本增效,提升公司管理,提高工作效率,提高工作效益,实现业务和系统的可持续发展。
五、智能物流项目创新与亮点
1.以自主技术为核心解决整体物流智能化需求
诺力根据智能物流装备制造业的特点,提出全面、完整的工厂整体物流系统解决方案,采用自主研发的智能立体库,运用自主开发的厂房一体化设计、自动化立体仓储、基于条码和RFID识别技术的智能仓储管理系统WMS,以及自主研发的基于5G通信技术的AGV搬运系统、基于电磁导引和环境导引的搬运机器人/码垛机器人的智能物流装备等核心物流装备及软件,实现与产线无缝对接下线产品自动打码扫描入库,具有灵活自定义配盘规则以提高取料效率,具备物料配送自主决策,并搭载智能运维平台数据云存储可追溯。
在整个工厂各个工序环节建设起拥有自主知识产权自动化物流基础平台,实现物料管理的集约化、精益化、标准化、现代化,实现生产物流的智能化,形成自主智能物流系统整体解决方案的示范运用。
值一提的是,“未来工厂”项目中诺力自主品牌产品(含装备、系统、软件)采购额占比达79.8%,采用的自主品牌工业机器人已通过CR认证,关键装备数控化率达到95%以上、生产数据自动采集率达到95%以上、数据采集分析系统与制造执行系统(MES)之间的数据自动传输率达到100%。
2.智能物流装备关键技术取得突破
诺力“未来工厂”建设项目通过自主创新和联合创新,实现了多项技术创新与突破:

车辆调度系统数字孪生界面
智能仓储及物流系统通过堆垛机结构优化设计、控制系统研究开发,解决了场地空间集约化利用、输送运行效率、操作更智能化高速节能、节约人工等方面关键问题;开发了现场分散控制驱动系统、伺服定位系统、调度信息系统,并将电气控制与调度软件充分结合,确保了系统的稳定高效;同时利用Siemens总线技术和工业以太网Ethernet的TCP/IP 协议搭载硬件设施,以集中管理、分散控制的方式将软硬件模块进行组合设计,完整适应立体仓库系统特点的控制要求。
围绕“物流机器人的创新与应用”,诺力突破了“机器人多目标协控制技术”、“高精度、高柔性存取技术”等行业共性技术难题:在机器人多目标协控制技术突破基础上,开发出了自主协同调度系统,解决了调度系统任务与机器人之间多对多匹配问题、最短路径优化、交通死锁与解锁等技术难题,能实现50 台及以上智能物流机器人的协同高效作业,系统能够替代进口。高精度柔性对接技术,实现AGV在工位节点上与对接目标的精准定位和衔接,对接定位精度达到±5mm,实现部分AGV技术的进口替代。开发的适用于窄通道的“超小转弯半径无人驾驶堆垛车AGL-PS10LMT”最小转弯半径1115mm,处于国际领先水平。
3.实现云化AGV、5G+AR的技术验证和应用示范
诺力通过将AGV调度系统部署在MEC边缘云平台上,实现调度系统的云化,多厂区的AGV通过云联网技术,借助CUII联通2B骨干网,实现多厂区多AGV集中调度,使得物流效率最大化。在远程运维方面,研究应用5G+AR技术,实现异地远程诊断与指导。通过将联合研发创新成果应用于本项目中,不仅实现技术创新的实地技术验证,而且通过示范应用与推广有助于突破新一代信息技术在更多场景中的有效运用,带动行业发展,助力《中国制造2025》实施建设。
4.充分运用数字孪生技术
“未来工厂”采用虚实结合手段构建产线一体化生产管理模式,建立各产线制造资源虚拟三维静态模型和运行动态模型。通过与产线MES系统集成,实时获取车间、产线设备、物料、物流状态信息及生产订单执行信息,实现信息数据的链接与交互,虚设备可以对实体设备的运行状态、生产过程进行在线实时动态的反映和控制,实现信息流、物料流和控制流的有序流转,同时还能预测可能发生的故障,及时作出决策指导,提高生产效率。
六、项目运作效果及价值
“未来工厂”智慧物流项目建设,为工厂物流的增效降本带来了极大助力,例如智能仓储与物流系统的建设与应用最大限度地降低了差错率和运营成本,提高工作效率和产能,实现不同重量和尺寸货品灵活存储,达到高效的空间利用率和库存周转率。总装车间的智能物流建设在助力生产效率提升的同时,有效地降低了人工成本,人员减少39人,减员率平均达到60.25%。
诺力通过物流系统平台型“未来工厂”建设,实现全流程、全周期的智能化、精细化制造,极大提升产业供给能力和柔性化制造能力,近几年尽管面临疫情的严峻冲击,诺力工厂仍然保持高效运转:与建设前的2018年相比,人均生产效率提高了59.68%,能源利用效率提高了104.69%,研发周期缩短了53.20%,运营成本降低了25.17%,不良率降低了43.52%。在疫情和外贸争端的双重压力下,实现逆势高速增长,2021年全年产值达到58.87亿元,相比2018年提升120%以上,取得了突出的经济效益。
与此同时,诺力通过“未来工厂”建设,实现了供应链企业间协作的便利化,提升服务能力和客户满意度,推动企业向服务型制造业转型,而且带动上游供应商进行智能化、数字化改造,推动产业链智能制造生态的建设。此外,诺力“未来工厂”在技术、管理、环保等方面具有示范价值,树立了行业标杆,社会效益明显。
猜你喜欢
房地产导刊(2021年10期)2021-11-22
中国食品(2021年2期)2021-02-24
物流技术与应用(2019年8期)2019-09-04
汽车观察(2018年12期)2018-12-26
消费导刊(2018年8期)2018-05-25
小学阅读指南·低年级版(2016年1期)2016-09-10
人间(2015年8期)2016-01-09
现代企业(2015年2期)2015-02-28
吉林地质(2014年4期)2014-03-11
自动化博览(2014年6期)2014-02-28
