水收集系统排水管网检测排查问题及对策
2023-04-04 12:40万佳明
建材与装饰 2023年11期
万佳明
(长沙市规划勘测设计研究院,湖南 长沙 410000)
0 引言
城市排水系统是城市市政系统的重要组成部分。但是,随着管道寿命的增加,管道老化和外部因素干扰的加剧,一些城市的管道出现了各种问题。这时就需要采用科学的检测技术,通过对管线的各种缺陷进行判断,并对其进行正确的处理,以确保管网的正常使用。
1 管道CCTV检测技术系统现状
CCTV检测技术是一种管道闭路电视的内窥镜技术,它采用闭路电视的方式,利用摄像机进入排水管,把视频资料传送到控制计算机,然后进行数据分析。CCTV是管线闭路电视监控系统中使用时间最长、使用最广泛的一种技术。采用CCTV监控技术,可以实现对地下管线的监测和实时监测,能够有效及时发现管路发生的故障。管道故障如图1至图3所示。
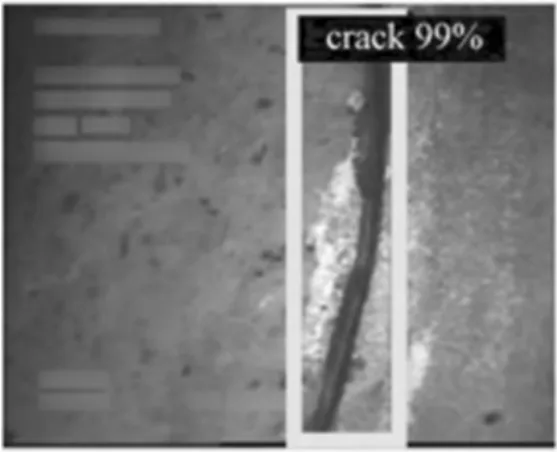
图1 管道破裂
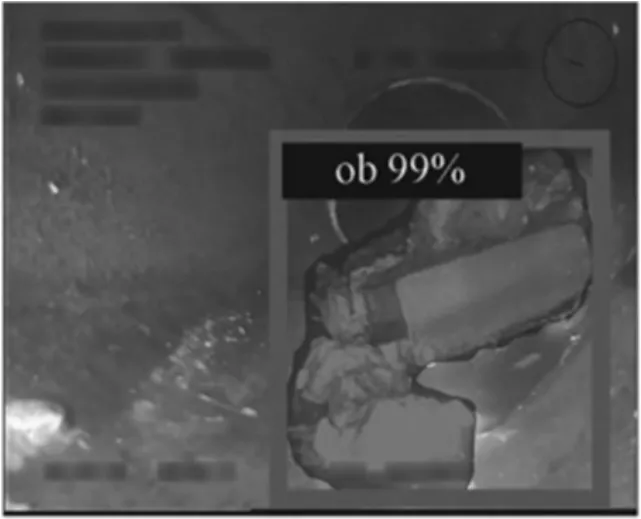
图3 管道障碍物
从管道的视频采集到最终的管线检测报告,是一项非常烦琐复杂的工作。其影响因素主要有人工判断类型、人工评估等级等。并且它的工作主要形式有视频数据导入、视频播放预览、添加检测信息、截取管道缺陷图像、添加管道缺陷说明等。它的缺点是自动化程度不高,人工效率低。尤其是管线缺陷的判断,耗费了大量的人力和财力,从而影响了工程的进度。因此,针对CCTV管线缺陷技术的研究重点是对管线缺陷进行智能化、自动化识别的功能升级。图4为CCTV视频管道缺陷检测模式[1]。
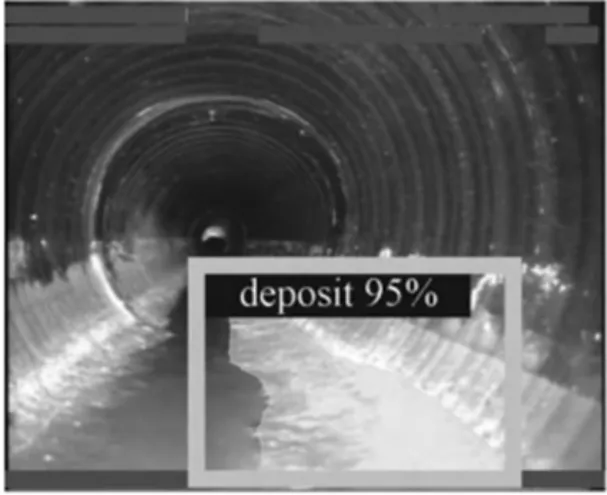
图2 管道沉积
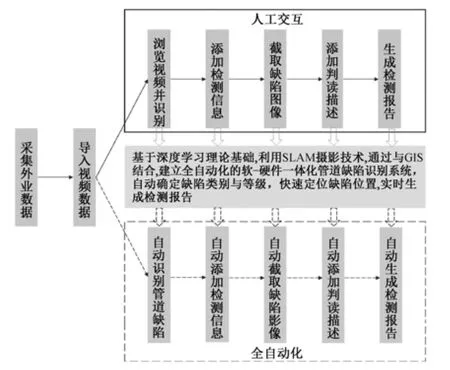
图4 CCTV视频管道缺陷检测模式
目前,管道CCTV故障的智能检测技术已由单一的检测方式逐渐发展为多重检测并存的工作形式,并将深度学习技术等先进应用引入管道故障诊断中,已有了一定的研究基础和成果,并在市政工程中得到了初步的应用,但还处在初步的探索和研究阶段,还没有完全实现管道故障的自动提取,目前还需要结合人工的主观判断才能实现故障检测,所以其技术还需要进一步的研究和发展。
2 城市管道CCTV视频检测方法
2.1 基于人工识别的检测方法
传统的基于人工视觉的CCTV技术在城市管线中的应用最为广泛。然而,随着管线的自然老化,长时间运行造成的自然磨损、人为损坏、监测设备老化等问题的出现,造成了城市CCTV的视频质量不能得到保障。并且随着测量工作的增加,对测量精度的要求也越来越高,导致城市管线的人工识别已经不能满足对管线的检测需求。裂纹和其他缺陷相比,都是微不足道的,用肉眼观察很可能会忽略,而高强度的工作也会造成工人的疲劳,从而增加漏检的可能性。此外,人工辨识主要依靠经验,且具有较强的主观性,不同技术人员的判断结果会有差异,从而影响到判断的一致性,从而导致错误的发生。因此,传统的人工筛选方法效率低下,必将逐渐被智能化的检测技术所代替[2]。
2.2 基于传统机器学习的检测方法
在现有的基于机器学习的管线缺陷识别技术中,常用的有支持向量机、BP神经网络、随机森林等。支持向量机可以通过结合纹理特征进行图像的自动分类,具有很好的准确率,可以达到90%以上。但是,基于对偶优化问题引入核函数,支撑向量机的选取与参数的调整密切相关。因而,不宜用于连续探测管线;BP神经网络可以以任何精度近似任何非线性函数,达到92%的准确率。随机森林算法通过对已标注的图像进行训练,能够较好地区分出有问题的和没有问题的图像,其准确率可达88%。但是,由于随机森林法对识别结果的影响,不能通过训练得到,必须手工进行调整,从而不能对缺陷进行自动分类。由于管道的缺陷类型很多,单一的方法很难对各种类型的缺陷进行有效的识别,而且由于管线的内部环境比较复杂,因此常规的检测方法在精度上受到了一定的限制。因此,对高精度、自动化和智能化的识别技术成为亟待解决的问题[3]。
3 管道CCTV视频智能检测面临的问题
3.1 样本数量不足
深度学习是一种典型的学习方法,它可以通过大量的样本来获得对象的特性,以达到与人相似甚至超过人的程度。然而,在实际的管线缺陷抽样中,尚无正规的管线缺陷资料。而在一般情况下,如破裂、变形、障碍物等故障问题,都可以得到较多的样品,而异物穿透故障问题,则很难采集到管线中的缺陷样品,因而不能满足动辄几万、几十万甚至上百万的深度学习模型,对模型的结构和性能都有很高的要求。由于管线的内部环境比较复杂,图像质量难以保证,严重影响了管线的识别,降低了智能识别的精度。
3.2 无法实现管道缺陷自动定级
管线的缺陷主要有两类:功能缺陷和结构缺陷,细分为16个小类。并按其不良程度进行分级。结构检查中的缺陷主要有四级变形、四级脱节、四级渗漏、四级断裂、四级断裂、三级腐蚀、支管暗接、三级异物穿入、三级错口、三级接口材料脱落。功能上的缺陷主要有四级障碍、四级结垢、四级沉积、四级残墙、四级树根、四级树根、三级浮渣。目前,智能检测技术大多采用Faster-RCNN等对象探测技术来进行管线缺陷的识别和探测,从而有效地解决了多个缺陷的发生。但是,目前的检测技术很难对所有的缺陷进行准确的识别,而且不能对其进行准确的分级,从而使其不能进行定量的检测。对缺陷进行准确的分类和分级,是进行缺陷修复工程、估算缺陷处理费用的关键。现有的智能技术不仅不能准确地辨识出所有的缺陷,而且很难对其进行分类和定级,从而使其在工程中的应用产生了很大的困难和不便。
3.3 场景坐标无法有效转换
实时实现视频空间坐标和实际空间坐标的转换是故障检测和排除的关键。利用GPS定位信息中的故障信息进行定位,同时对电子地图进行多种标识分类,可以清楚地反映城市地下管线的健康状况及缺陷的分布。为快速确定缺陷部位、及时进行规划和实施工作提供了依据,建立了实时的影像-场景坐标变换系统是必要的。目前的智能管线缺陷检测技术虽然能够对视频进行识别,但是CCTV摄像机只能在视频中统一的呈现出实时的视频信息,具体坐标不能从后台获得,因此要从视频中提取坐标、距离等信息并进行转换,这就增加了实时的视频坐标和空间坐标变换的困难,很难将图像中的内容与实际情况进行有效的融合。
4 管道CCTV视频智能检测技术改进措施
4.1 小样本深度学习模型的应用,以提升识别精度
随着管线缺陷智能化的研究,管线缺陷数据的收集会越来越丰富,而且在数量和质量上都会得到提高。同时,由于当前深度学习技术的海量样本颇丰,因此如何降低其对样本的依赖性也是今后的一个重要课题。当前,深度学习正逐步向降低样本依赖性方向发展,其方法是:模拟训练样本,增加数据集,运用先验知识,提高学习能力,以最大限度地降低样本数对模型的影响,加快模型的收敛,提高模型的推广精度,使其达到半监督学习、无监督学习、小样本学习乃至零样本学习的目标。针对管线缺陷质量不能保证、数量极度缺乏的现状,采用小样本学习技术为管线缺陷的智能识别提供了新的思路和机会[4]。
4.2 运用语义分割深度学习模型,以实现管道缺
卷积神经网络是一种用于图像分类和回归的智能方法。全卷积神经网络(FCN)采用上取样层取代卷积神经网络的全连通层,从而达到对物体的象素级分割,并在医学图像分割、道路场景语义分割、环境感知等方面进行了大量的研究。利用语义分割技术对管线进行分类,可以有效地识别出各种缺陷,标注出缺陷的区域,并对其进行划分,并利用划分面积进行精确划分,从而有效地解决了实际情况下的病害映射问题。图5为卷积神经网络。
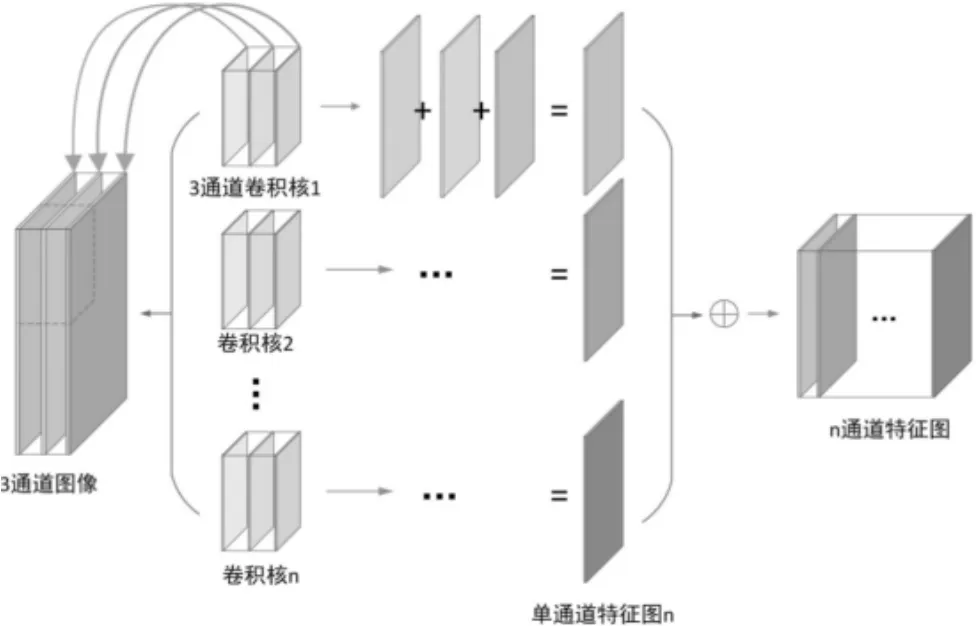
图5 卷积神经网络
4.3 坐标转换问题的解决,以实现缺陷尺寸大小的自动估算
即时定位与地图构建(simultaneouslocalizationand mapping,SLAM)首先被用于机器人,它的目的是利用传感器的信息来实现对周围环境的实时绘制,并通过对其进行预测。该系统采用了全景摄像机,并将激光雷达和SLAM技术相结合,实现了管道的三维立体成像,如图6所示。通过将影像和GIS技术相结合,可以实现实时的视频坐标和实际的空间坐标变换,便于工作人员根据缺陷的空间信息,及时确定管道缺陷所在的位置,并对管道缺陷进行精确测量,并依据缺陷类型、等级等信息,及时制订出相应的解决措施,为后续的管道修复过程设计和造价计算提供了可靠的依据。

图6 激光SLAM的地图构建
4.4 建立软-硬件一体化系统,以实现管道缺陷识别的自动化流程
随着城市管线缺陷识别的自动化和智能化进程的不断加快,今后的软硬件集成是必然的。采用软硬件集成的方法,可以根据现场采集的资料自动识别病害类型,判断病害等级,自动分析和提取管线缺陷,为管线缺陷增加详细的说明,并将其标记为电子地图,并可通过电子地图查看管线的总体健康情况与检测点的影像,并根据以上的智能提取信息,形成一套固定的规范格式的管线缺陷报表,实现一图整体统一管理[5]。
5 结语
综上所述,对管道进行质量检查和故障排查,可以为管道的维修和恢复提供准确的科学依据。文章就排水管网的检查和分析技术问题进行了较为详尽的论述,以期达到对管道故障进行智能检测,提升CCTV监测技术的应用和推广,降低人工投入,提高检测的效率和准确度。
猜你喜欢
今日农业(2020年22期)2020-12-25
电子制作(2019年19期)2019-11-23
中国特种设备安全(2019年3期)2019-04-22
石油化工建设(2017年2期)2017-06-05
电子制作(2017年10期)2017-04-18
电子制作(2017年9期)2017-04-17
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
上海金属(2015年4期)2015-11-29
海军航空大学学报(2015年4期)2015-02-27