
Moving Target Landing of a Quadrotor Using Robust Optimal Guaranteed Cost Control
2023-03-27 02:41KeweiXiaSeongMinLeeWonmoChungYaoZouandHungsunSon
Kewei Xia, Seong-Min Lee,, Wonmo Chung,Yao Zou,, and Hungsun Son,
Dear Editor,
This letter proposes a robust control strategy for the autonomous landing of a quadrotor on a moving target.Specifically, a force command that consists of a cascade dynamics estimator and an optimal guaranteed cost control law is exploited for the position-loop tracking.Then, an orientation constraint torque command is employed for the attitude-loop tracking such that the quadrotor refrains from flipping during the landing operation.Stability analysis indicates that the overall closed-loop system is asymptotically stable.Finally, flight experiments validate and access the theoretical results.
Recent years have witnessed the rapid development of unmanned aerial vehicles (UAVs), especially in military and civil fields, such as forest reconnaissance, urban surveillance, and transportation [1]–[3].To improve the tracking performance of the UAV, numerous control algorithms have been reported.A multiple-observer based controller was exploited to overcome the wind disturbance and payload [4].A robust control algorithm was investigated to counteract the rotor fault and disturbance [5].In particular missions like refueling and maritime rescue, the autonomous landing of the UAV is significant and inevitable [6].However, the unavailable target’s acceleration could prevent the direct application of these algorithms [4] and [5].
To land a quadrotor on a moving platform, an adaptive control strategy was designed [7].A formation controller was proposed for the UAV tracking and landing on a ground vehicle [8].As for the shipboard landing of the UAV, a robust adaptive control approach with mission planning was provided [9].The control barrier function was introduced into an adaptive neural network control algorithm to solve the unmanned helicopter ship landing with visibility constraint[10].It is worth noting that the orientation of the UAV should be maintained within a safe range during the landing operation that refrains from flipping over.Unfortunately, all the previous mentioned control strategies are developed without this consideration [4],[5] and [7]–[10].Besides, the control strategies in [7], [9] and [10]have not been validated by flight experiments, a complicated implementation with multiple parameter tuning could be faced due to the developed control forms [7], [9] and [10].Therefore, how to design a robust control strategy with simple implementation and parameter tuning is still significant yet challenging, which is the motivation of this study.
Motivated by the above observation, this letter focuses on the control development with the experiment validation for a quadrotor landing on a moving target.The main contributions are summarized as follows: 1) In contrast to [7], [9] and [10], the bounded force command consisting of a nominal PD control and a robust dynamics estimator not only provides a simple implementation and parameter tuning but also ensures the system robustness.2) Compared with [4], [5]and [7]–[10], the torque command is designed with orientation constraint which is formulated based on the physical meaning.This could prevent the quadrotor from flipping over during the landing operation which further enhances the reliability of the control system.
Problem formulation: In terms of the Newton-Euler formulation,the dynamics of the quadrotor is described as

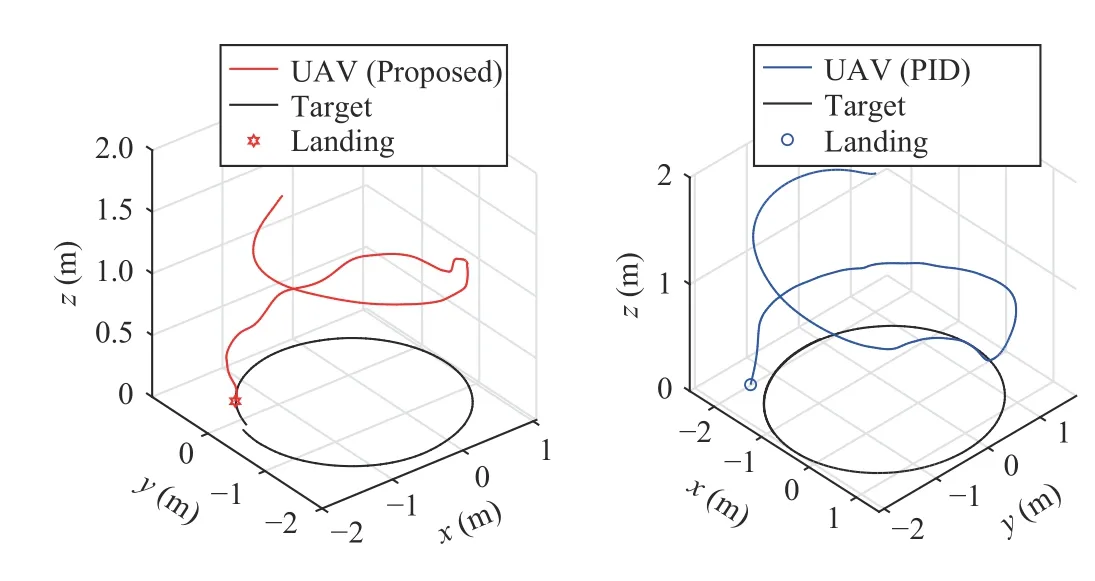
Fig.1.Trajectories of the quadrotor and the target.

Fig.2.Relative position.
Fig.1 draws the trajectories of the quadrotor and the target.Fig.2 collects the relative positions.It can be seen that the quadrotor is tracking the target while gradually descending to it during the experiment.When the landing conditionp˜z≤0.05 m is satisfied, the quadrotor is terminated and finally lands on the desired zone of the target.It can observed that the proposed strategy guarantees a smaller transient and higher control accuracy than the PID control.Therefore,the effectiveness of the proposed control strategy has been verified by real-time experiments.
Conclusion:In this letter, the control development for the autonomous landing of a quadrotor on a moving target has been investigated.Based on the integral sliding mode framework, a robust hierarchical strategy consisting of a bounded PD force command and an orientation constraint torque command is proposed, where the cascade dynamics estimator is exploited to compensate for the system uncertainty.Flight experiments with comparison results demonstrate the advantages and highlights of the proposed strategy.
Acknowledgments:This work was supported in part by the Future Innovation Research Funds of Ulsan National Institute of Science and Technology, Development of Drone System for Ship and Marine Mission (1.220025.01) of Institute of Civil-Military Technology Cooperation (2.200021.01), the National Research Foundation of Korea grant funded by the Korea Government (MSIT) (2020R1F1A 1075857), Basic Science Research Program through the National Research Foundation of Korea funded by the Ministry of Education(2020R1A6A1A03040570), Beijing Institute of Technology Research Fund Program for Young Scholars, and the National Natural Science Foundation of China (62203054).
 IEEE/CAA Journal of Automatica Sinica2023年3期
IEEE/CAA Journal of Automatica Sinica2023年3期
- IEEE/CAA Journal of Automatica Sinica的其它文章
- Meta-Energy: When Integrated Energy Internet Meets Metaverse
- Cooperative Target Tracking of Multiple Autonomous Surface Vehicles Under Switching Interaction Topologies
- Distributed Momentum-Based Frank-Wolfe Algorithm for Stochastic Optimization
- A Survey on the Control Lyapunov Function and Control Barrier Function for Nonlinear-Affine Control Systems
- Squeezing More Past Knowledge for Online Class-Incremental Continual Learning
- Group Hybrid Coordination Control of Multi-Agent Systems With Time-Delays and Additive Noises