提高VSC无功功率支撑能力的直流电压补偿控制策略
2023-03-24 11:20王常安刘俊勇
电力系统及其自动化学报 2023年2期
王常安,刘俊勇
(四川大学电气工程学院,成都 610044)
在当今能源问题突出、环境污染严重的背景下,开发可再生能源参与并网发电是电力系统发展的必然趋势[1-2]。电压源换流器VSC(voltage source converter)作为可再生电源的并网接口,具有四象限运行,故障时能保持运行稳定等优势,在电力系统中的占比日益提升[3-4]。基于锁相环PLL(phase locked loop)同步的内外环矢量控制结构简单,运行方式灵活多样,现广泛应用于实际工程中的VSC并网控制。矢量控制模式下,VSC可实现有功、无功功率解耦控制,具备为交流系统提供无功功率支撑的潜力[5-6]。
采用VSC作为无功电源参与交流系统电压调节与无功支撑,能够减少无功补偿设备的接入,提高系统的经济性。然而VSC输出的无功功率升高时,并网点PCC(point of common coupling)电压将随之升高,传统矢量控制模式下,VSC的脉冲宽度调制PWM(pulse width modulation)环节将出现过调制,进而导致VSC输出的交流电压波形谐波含量显著升高[7]。交流系统谐波含量通常用总谐波失真THD(total harmonic distortion)表示,当VSC交流系统THD高于电网安全稳定要求的水平时,将导致交流系统电能质量急剧下降,进而威胁电力系统安全稳定运行。
针对上述问题,现有工作从提升VSC参与交流系统无功支撑和电压调节的能力,以及降低交流电压谐波含量两方面开展研究。在提升VSC无功支撑能力方面,文献[8]综合考虑风机并网VSC无功功率的限制条件,进而提出了适用于不同风机转速下的无功控制方式,以提高VSC的无功输出能力;文献[9]提出了一种由VSC-HVDC系统及风电系统内部背靠背换流器共同参与的协同控制策略,以满足风电系统无功功率的需求。然而上述两方法均未计及VSC输出无功升高时因PCC电压幅值过高而导致的PWM过调制问题,因此其可行性将受到限制。计及提升VSC输出无功而导致的PCC电压过高问题,文献[10]提出了一种改进电压支持无功功率控制策略,使得VSC在满足交流电压约束条件下,通过比例积分PI(proportional integral)控制器使VSC输出的无功功率自适应交流系统电压波动以参与无功支撑,提高VSC并网电网的稳定性;文献[11]针对VSC并网系统出现电压波动时,无功支撑设备频繁投切的问题,提出了一种无功协调控制策略,在不同电网条件下提高VSC无功功率响应能力的方法,实现电压波动抑制,提高电力系统稳定性。然而上述方法旨在平抑交流电压及无功波动,对于VSC无功能力提升效果有限。文献[12]提出了一种基于改进型混合桥IH-B(improved hybrid-bridge)的逆变器拓扑结构,进而通过改进的正弦脉宽调制技术来实现交流电压升高时抑制交流电压谐波,进而提高VSC的无功功率支撑能力。然而该方法仅适用于特定拓扑结构的逆变器,对于实际系统中应用的基本换流器难以适用。
针对PWM过调制所导致的交流系统谐波含量升高现象,文献[13]提出了部分电容电流前馈的改进控制方案,即在谐波抑制控制器的作用下,针对性地抑制指定次的并网电流谐波,进而提高了交流系统电能质量;文献[14]建立了脉冲边沿延时与VSC桥臂电流的函数关系,提出了一种通用的脉冲延时补偿策略,采用通用的高频纹波电流预测算法组合基波电流并重构桥臂电流,进而有效抑制交流波形畸变。然而上述方法主要针对PWM调制比处于正常范围内时的VSC交流波形谐波抑制,当调制比超过阈值时,上述控制方式对于谐波的抑制效果有限,难以使THD限制在系统允许的范围内。针对轻载运行等交流系统电压升高的工况下出现的VSC并网交流系统谐波总畸变率升高现象,文献[15]提出了一种抑制网侧电流谐波的自适应余弦内模控制方法,有效抑制了交流系统奇次特征谐波,进而提高交流系统电能质量;为解决分布式电源波动引起的电压越限所造成的谐波含量升高问题,文献[16]提出了一种分布式电源接入电网的协同控制策略,在电压波动时该策略可合理调度分布式电源与传统补偿设备协调运行,实现区域内电压波动和谐波抑制;文献[17]提出了一种谐波抑制和无功控制方案相结合的双重控制策略,以解决VSC端口电压超限导致的交流系统谐波含量升高的问题;文献[18]提出了一种新型的并网逆变器控制方式,该逆变器除了传送有功电能以外,还能够根据电网中的谐波含量情况向电网注入相应的无功和谐波,以进行补偿和抑制。然而上述方案仅适用于解决交流电压升高导致的谐波含量过高的问题,所提出的控制策略无法提升VSC的无功支撑能力。
为解决上述问题,本文提出了一种直流电压补偿控制策略,该策略在VSC输出的无功功率升高时能够自适应地改变直流电压幅值,以保证PWM不出现过调制现象,实现提升VSC无功支撑能力的同时,将交流系统电压谐波含量限制在交流系统要求的范围内。通过状态空间模型,给出了直流电压补偿控制的参数设计可行域。基于Matlab/Simulink的仿真结果验证了所提出的优化控制策略的有效性。与其他提升VSC无功支撑能力的方案进行对比,体现了该控制策略的良好经济性。
1 VSC并网系统及无功能力制约条件
本节首先介绍VSC并网系统拓扑结构及传统矢量控制策略,进而分析了传统矢量控制策略下VSC输出无功功率的制约条件,并指出当VSC的无功输出超过阈值时将使PWM环节出现过调制,进而导致交流系统谐波含量显著升高。
1.1 VSC并网系统及传统矢量控制策略
两电平VSC的并网拓扑结构及基于PLL并网的传统内外环矢量控制系统如图1所示,图中:E∠δ表示VSC端口电压,Vt∠θ、Vs∠θ分别表示PCC及交流系统的电压;VSC经交流滤波装置实现并网;Lf、Cf分别表示VSC端口LC滤波器的电感与电容;Ls表示PCC与交流系统之间的等效电感;C表示直流系统等效电容;PDC表示直流传输功率。
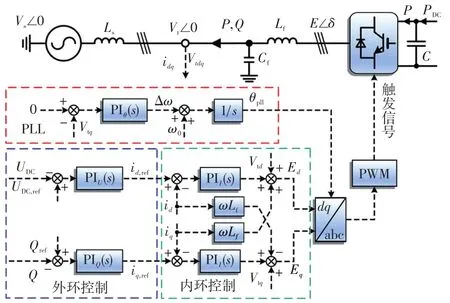
图1 VSC并网拓扑结构及矢量控制系统Fig.1 Topology of VSC grid-connection and vector control system
VSC采用内外环经典矢量控制并网运行,其中有功侧、无功侧外环分别选取直流电压控制和无功功率控制,具体控制动态为
式中:UDC、UDC,ref分别为直流电压及其对应的参考值;Q、Qref分别为无功功率及其对应的参考值;PIU(s)=kpU+kiU/s,为直流电压外环的PI控制环节;kpU、kiU为其对应的比例、积分系数;PIQ(s)=kpQ+kiQ/s,为无功功率外环的PI控制环节,kpQ、kiQ为其对应的比例、积分系数;idref、iqref分别为生成内环d、q轴参考电流;s为微分算子。
基于VSC外环输出的电流参考,电流内环实现输出电流对参考值的追踪,其具体表达式为
其中:PII(s)=kpI+kiI/s为电流内环的PI控制环节,kpI、kiI为其对应的比例、积分系数;Ed、Eq分别为VSC端口电压在同步旋转坐标系下的d、q轴分量;id、iq分别为VSC输出电流在同步旋转坐标系下的d、q轴分量;Vtd、Vtq分别为PCC电压的d、q轴分量;ω为同步频率。
PLL用于捕获PCC电压相位,实现VSC并网,其具体表达式为
式中:PIθ(s)=kpθ+kiθ/s,为PLL的PI控制环节,kpθ、kiθ为其对应的比例、积分系数;ω0为系统额定频率;θpll为PLL的输出相角。
1.2 VSC无功输出能力制约条件
矢量控制模式下,VSC能够独立控制有功、无功输出,因此可以根据上层调度控制指令作为无功电源,向交流系统提供无功支撑,参与电压调节;亦或是在系统出现扰动时通过相应的控制策略自适应参与无功支撑,维持交流电压稳定。VSC的器件功率约束是最基本的物理约束,在实际系统中基于运行条件选择合适的功率等级,因此不深入讨论。本节着重分析控制系统和PWM调制对VSC无功输出的约束。
考虑到LC滤波器的电容Cf很小,故而可忽略滤波电容对交流系统无功功率的影响,由此可得VSC输出的无功功率Q与交流系统电气量的关系表示为
式中:E、Vs分别为VSC端口相电压以及交流电网电压幅值;δ为VSC端口电压与交流系统电压相角之差;XΣ为滤波电抗及交流线路电抗之和,XΣ=ω0(Lf+Ls)。
通常换流站PCC电压幅值Vt等于或略高于交流系统电压幅值Vs。此外,由于滤波电感较小,VSC端口电压幅值E约等于PCC电压幅值Vt,故E>Vscosθ。再结合式(4)可得,当VSC输出的Q升高时将导致E升高。
VSC控制系统的PWM环节调制系数kA与直流电压及VSC端口电压的关系表示为
由式(5)可见,当Q升高而使得E上升时,若直流电压UDC保持不变,则kA必将上升。现有研究工作指出,VSC交流输出波形的谐波含量与调制系数kA有关,当kA超出其阈值kA,lim(通常为1)时,VSC交流输出波形将因PWM过调制而发生严重畸变,进而使得VSC输出的交流波形THD显著上升,严重影响系统安全稳定运行[13-14]。图2给出了PWM环节正常调制及过调制时的VSC触发信号及PCC电压波形,可见,当kA由1.0升高至1.2时,PCC电压THD由1.7%急剧提升至16.6%,波形畸变严重,将严重影响交流系统安全运行。

图2 PWM过调制对交流波形的影响Fig.2 Influence of PWM over-modulation on AC waveforms
一些研究指出,提升VSC器件的开关频率或使用具有新型拓扑结构的VSC对过调制时的交流波形畸变有一定的改善效果,因此可使得VSC能够在更高的调制系数下运行[13-15]。然而上述方法对电力电子器件或换流器设计与制造均提出了更高的要求。因此采用针对器件层面的优化方法,必将显著提升换流站建设成本,且亦难以适用于已投入运行的设备。为此,本文提出一种直流电压补偿控制策略,能够在提升VSC无功输出能力的同时,限制VSC输出交流电压的谐波含量。
2 直流电压补偿控制策略
本节提出一种改进的直流电压补偿控制策略,该策略能够在VSC输出无功功率超过阈值时,自适应地调节直流电压,以避免因输出无功功率升高,造成VSC端口电压升高而引发PWM过调制现象,使交流系统谐波含量控制在系统允许范围内。
2.1 VSC无功功率极限
采用定直流电压控制模式时,若VSC输出无功功率上升,势必导致端口交流电压幅值上升,进而易导致kA超过其阈值而出现过调制现象。因此本节分析定直流电压控制模式下的VSC输出无功功率上限。
由式(4)可得,VSC端口电压的表达式为
考虑到控制直流电压的VSC背后的直流传输功率PDC通常由发电侧的新能源及其接口整流器以定有功功率形式送出,因此在分析过程中,认为VSC在稳态时始终输出额定有功功率,故VSC有功功率P与交流系统电气量的关系可表示为
基于式(7)表示出VSC端口电压相角并代入到式(5)中,可得VSC端口电压E与有功功率P及无功功率Q的关系为
PWM调制系数的阈值为kA,lim,则由式(5)可得定直流电压控制模式下,VSC端口电压的阈值为
将式(9)代入式(8)中,即可求出定直流电压控制下kA=kA,lim时VSC的无功功率上限Qlim为
2.2 直流电压补偿控制策略原理
当VSC输出的无功功率Q未超过Qlim时,PWM环节不会出现过调制,因此采用定直流电压控制即可保证交流系统电能质量。由式(5)可见,当Q超过Qlim时,若能够提升直流电压UDC,即可使kA不超出kA,lim。
此时可根据VSC期望无功输出的Qref,按式(8)计算出端口电压E的稳态值,再将其代入式(5),即可求得期望无功条件下,满足kA≤kA,lim的最低直流电压幅值为
此时将式(10)的计算结果UDC,set作为直流电压参考UDC,ref,即可保证PWM不出现过调制现象。
值得指出的是,基于式(11)计算直流电压参考时,需要获得交流电压Vs及VSC到交流电网间的等效阻抗XΣ的准确值,然而实际系统中Vs是波动的,通常用其额定值计算。此外,XΣ为估计值,与实际值相比亦存在一定偏差。因此若直接利用式(11)计算直流电压参考值将存在误差。此时可引入式(12)所示的直流电压补偿环节,为直流电压提供一个补偿量UDC,c,并与式(10)计算出的直流电压设定值UDC,set相叠加,进而得到直流电压参考值UDC,ref,其完整的控制策略为
式中:PIc(s)=kpc+kic/s,为直流电压补偿控制的PI环节;kpc、kic为其对应的比例、积分系数;UDC,0为直流电压初始设定值;UDC,c为直流电压补偿控制生成的直流电压补偿量。
记VSC输出期望的无功功率,且实际的PWM调制系数kA=kA,lim时,对应的直流电压幅值为,图3给出了补偿控制器的运行原理。当因Vs波动或XΣ估计产生偏差导致按式(10)计算出的直流电压参考值时,此时 kA<kA,lim,基于式(12)的PI控制器可实现调制系数kA对kA,lim的追踪,进而得到UDC,c<0并作为直流电压参考值的补偿量,使得,避免直流电压过度升高。同理,当时,基于式(12)得到UDC,c>0作为补偿,进而使得,避免因直流电压低于其期望值而导致PWM过调制。
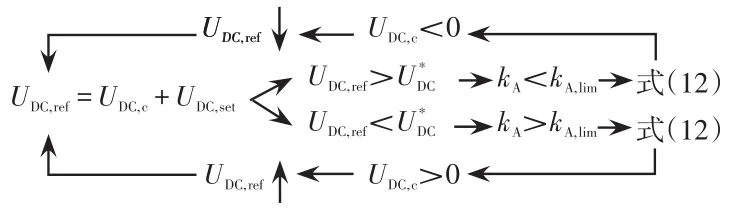
图3 直流电压补偿控制原理Fig.3 Principle of DC voltage compensation control
此外,考虑到直流系统的电压水平受直流设备耐压程度及继电保护要求的限制,过高地提升直流电压将导致系统可靠性降低,因此在投入直流电压补偿控制时,考虑限幅环节,即
式中:UDC,upper为直流电压允许提升的上限;k为系数,根据直流系统耐压程度的不同,k值可适当进行选取,直流系统的耐压程度越高,则k的取值可越大。
综上,可得直流电压补偿控制策略的结构如图4所示。其具体实现过程可归纳如下。
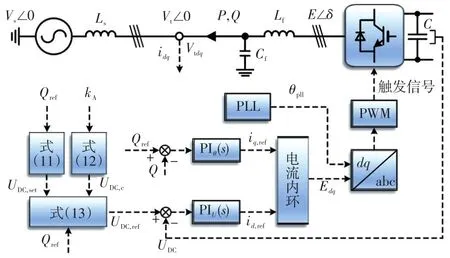
图4 直流电压补偿控制策略拓扑Fig.4 Topology of DC voltage compensation control strategy
步骤1根据VSC初始直流电压幅值UDC、交流系统阻抗估计值,以及交流电压额定值,计算出PWM调制极限kA,lim对应的无功功率极限Qlim。
步骤2根据系统协调调度指令,生成VSC计划无功功率Qref;并判断VSC计划无功功率Qref与定直流电压条件下Qlim的大小关系。
步骤3若Qref>Qlim,则按式(11)及式(12)分别计算直流电压设定值UDC,set及补偿值UDC,c,并相加得到UDC,ref,若Qref<Qlim,则直流电压参考值不变。
步骤4当VSC期望输出的无功功率低于Qlim时,切换回定直流电压控制,使直流系统电压恢复至正常状态。
基于直流电压补偿控制,可实现提升VSC无功输出能力的同时兼顾交流波形的电能质量。
3 直流电压补偿控制策略参数设计
本节首先建立了图4所示的VSC采用直流电压补偿控制策略下系统的小信号模型,并基于该模型建立状态空间模型,给出了满足系统稳定的直流电压补偿控制PI系数的可行域。
3.1 直流电压补偿控制VSC并网系统状态空间模型
直流电压补偿控制下VSC并网系统小信号模型详细的推导过程如下。
由式(1)~(3)可得,VSC直流电压外环、无功功率外环、电流内环及PLL动态的小信号形式分别为
式中,Δ表示变量的小信号增量。交流系统电路模型的小信号形式为
交流电网电压Vs的d、q轴分量的小信号形式为
基于交流电路模型,可得VSC控制系统所需的反馈量ΔP、ΔQ为
直流系统电容电压动态为
基于式(12)和式(13)可得直流电压补偿控制环节的小信号形式为
综合式(15)~(22),可得直流电压补偿控制策略下,VSC并网系统的小信号模型的具体结构如图5所示。
基于图5所示的小信号模型,推导出系统的状态空间模型。取状态变量为
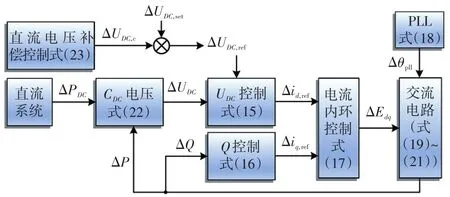
图5 直流电压补偿控制策略下VSC并网系统小信号模型Fig.5 Small signal model of grid-tied VSC system under DC voltage compensation control strategy
取输入变量u=Qref,并考虑到实际系统中θpll0很小,因此式(20)中cosθpll0≈ 1,sinθpll0≈ 0。再结合式(15)~(24)可得直流电压补偿控制策略下VSC并网系统状态空间模型为
相关参数为
在Matlab/Simulink环境下搭建了图4所示的采用直流电压补偿控制策略时,VSC并网系统的详细开关模型,系统各电气参数及控制参数如表1所示。
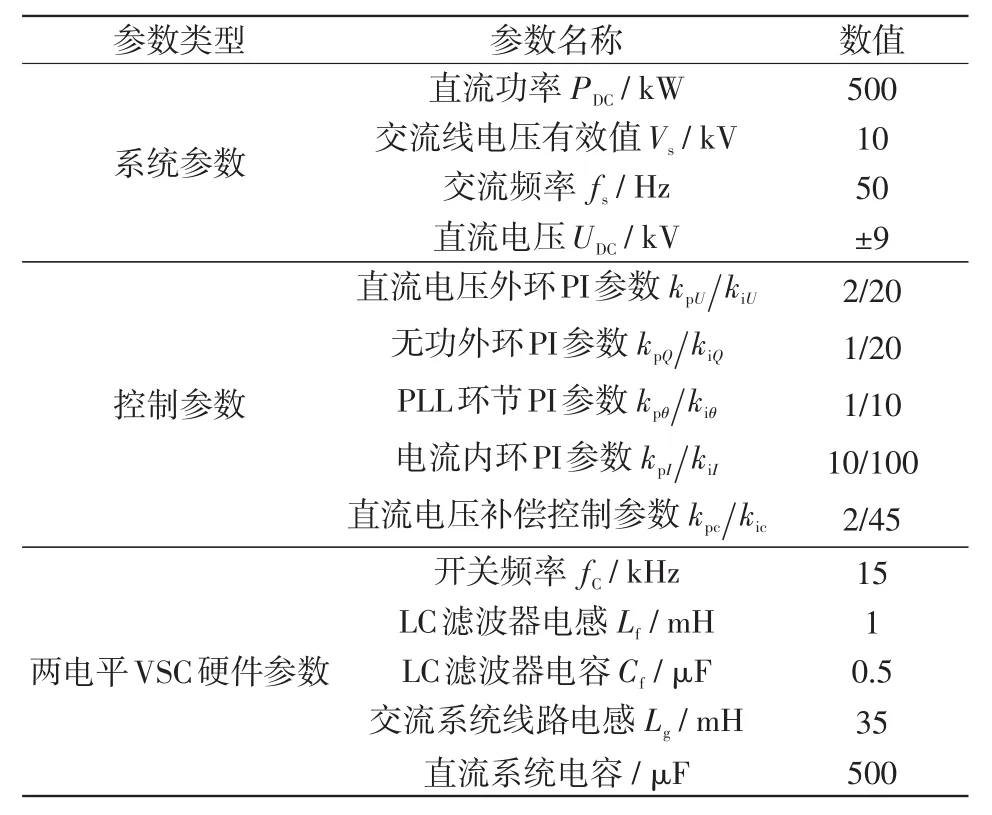
表1 系统参数Tab.1 System parameters
基于表1所示参数,图6给出了t=1 s时,VSC无功功率参考值Qref由0阶跃至0.3 p.u.工况下,系统直流电压及VSC输出无功功率的动态响应的对比结果,可见两者具有相同的动态响应特性,由此验证了所推导的状态空间模型的正确性。

图6 状态空间模型验证Fig.6 Verification of state space model
3.2 直流电压补偿控制PI系数的可行域
基于第2节分析可知,当VSC接收调度指令升高无功外环参考Qref时,若期望无功输出条件下对应的kA>kA,lim,则投入直流电压补偿控制环节使kA追踪kA,lim。这意味着此环节的PI系数kpc和kic越大,则kA将越快地追踪kA,lim。然而若kpc和kic设置得过大,将导致产生的补偿量UDC,c过大,UDC,ref的值也将过度升高,进而因直流电压外环的作用,造成输出的d轴电流参考id,ref增大,导致输出有功功率P升高。由式(22)所示的直流电容电压动态可见,P的升高将造成直流电压进一步下降,进而在直流电压外环的控制作用下导致id,ref进一步增大,严重时将导致系统失稳。因此kpc和kic的设计应有一个合适的范围。详细分析如下。
基于VSC并网系统状态空间模型,图7给出了直流电压补偿控制PI环节参数变化条件下,系统特征值的变化情况。图7(a)给出了直流电压补偿控制比例系数kpc由2升高至20时的系统根轨迹变化,可见升高至19.6时,一对共轭复根将穿越至正半平面,导致系统失稳。图7(b)对应该环节积分系数kic由20升高至100时的系统根轨迹变化,可见kic升高至78时失稳。
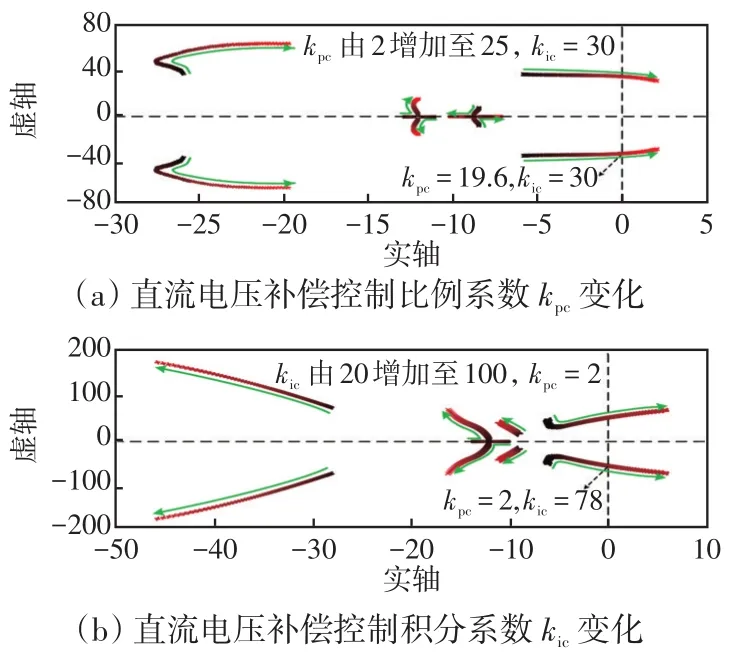
图7 直流电压补偿控制参数变化时的系统特征值轨迹Fig.7 System eigenvalue trajectory under changes in DC voltage compensation control parameters
由此可见,需要给出合适直流带宽补偿控制环节PI系数范围,在提升VSC无功支撑能力的同时,保持系统稳定性。基于VSC并网系统的状态空间模型,首先给定直流电压补偿控制环节的比例系数,并逐渐升高该环节的积分系数,直至特征值穿越至正半平面,此时的kic即为当前kpc条件下的临界kic。再逐渐升高比例系数,重复上述过程,即可得到满足系统稳定的kpc-kic参数范围。基于上述方式,图8给出了表1所示参数条件下kpc-kic的可行域,如图中阴影部分所示。此外,图中虚线还给出了系统主特征值阻尼比ζ=0.707时所对应的直流电压补偿控制系数取值,此时可兼顾系统的稳定性和快速性。在其他参数条件下,也只需按照上述过程计算,即可求得对应的参数设计的可行域。
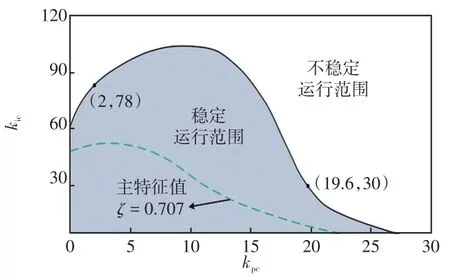
图8 kpc-kic的可行域Fig.8 Feasible region ofkpc-kic
4 仿真验证
为验证本文所提出直流电平补偿控制策略对于提升VSC无功功率输出能力的同时,亦可将VSC的交流电压THD限制在系统允许的范围内,本节基于Matlab/Simulink环境下的VSC并网详细开关模型进行仿真验证,系统电气参数及控制参数如表1所示。
4.1 VSC无功输出能力提升的验证
当VSC分别运行在定直流电压控制和直流电压补偿控制策略下,升高VSC无功外环参考Qref参与交流系统无功支撑时的仿真结果对比如图9所示。
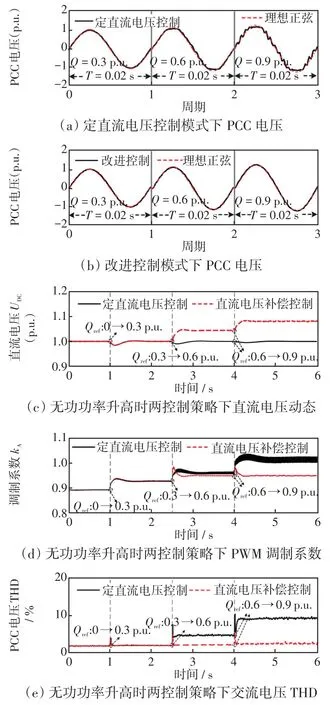
图9 两控制策略下VSC无功升高时系统特性对比Fig.9 Comparison of system characteristics as VSC reactive power increases under two control strategies
初始条件下VSC直流电压为110 kV,交流电压为60 kV,此时的PWM调制系数kA=0.9。在运行过程中,VSC输出的有功功率保持为1 p.u.不变,取调制系数上限kA,lim=1,则由式(10)可计算出定直流电压控制模式下,VSC输出的无功功率上限Qlim为0.46 p.u.。VSC无功功率输出量初始为0,在t=1.0 s、t=2.5 s、t=4.0 s时,交流侧分别投切Q=0.3 p.u.的感性负载,VSC作为提供无功支撑的设备,根据上层控制指令在相对应时间时,无功功率参考值Qref均分别上升0.3 p.u.。在t=1.0 s后,VSC输出无功为0.3p.u.,未超过VSC无功功率上限,系统仍保持原定的直流电压运行,在t=2.5 s后,VSC的输出无功Q=0.6 p.u.,将超过 Qlim=0.46 p.u.。
对比图9(a)、(b)可见,当Q>Qlim时,传统的定直流电压控制策略下,PCC电压波形畸变严重,且随着Q的升高,畸变程度将进一步加剧,严重影响交流系统稳定运行。而采用改进控制策略后,PCC电压波形极其接近理想正弦波形。结合图9(c)~(e)可见,当VSC输出无功功率超过Qlim时,优化控制策略下系统将根据Qref自适应提升直流电压UDC,使得调制系数kA维持在1.0,进而保证VSC输出电压波形的THD始终控制在2%以下,而传统定直流电压控制下,当Q>Qlim时THD将急剧上升。综上可见,仿真对比验证了所提出的优化控制方法在兼顾VSC无功支撑能力的情况下,保持交流系统电能质量的有效性。
4.2 直流电压补偿控制对于系统特性的优化效果
选取根据式(11)所求得的设定值UDC,set作为直流电压参考值(后文简称“模式I”),以及引入式(12)所示的直流电压补偿控制环节后,采用式(13)所得的UDC,ref作为参考值(后文简称“模式II”)两种模式进行仿真验证,用于展现所提环节对于系统特性的优化效果。
基于表1所示系统参数,图10给出了交流系统等效阻抗估计值高于以及低于实际值,VSC采用模式I和模式II时,参与无功支撑时的系统特性对比结果。
由图10可见,VSC运行在模式I下,当交流系统等效阻抗的XΣ估计值小于其实际值时,基于式(11)计算出的直流电压设定值UDC,set将低于VSC期望无功功率条件下kA=kA,lim时对应的直流电压,在VSC输出的无功功率Q>Qlim时,将使得实际的PWM调制系数kA>kA,lim,进而造成VSC输出的交流电压谐波THD显著升高,远超出系统允许的范围。相似地,当XΣ估计值大于实际值时,直流电压设定值UDC,set将偏高,进而使得kA<kA,lim,导致直流电压UDC过度升高,这对直流系统的绝缘和保护设备的安全运行存在不利的影响。
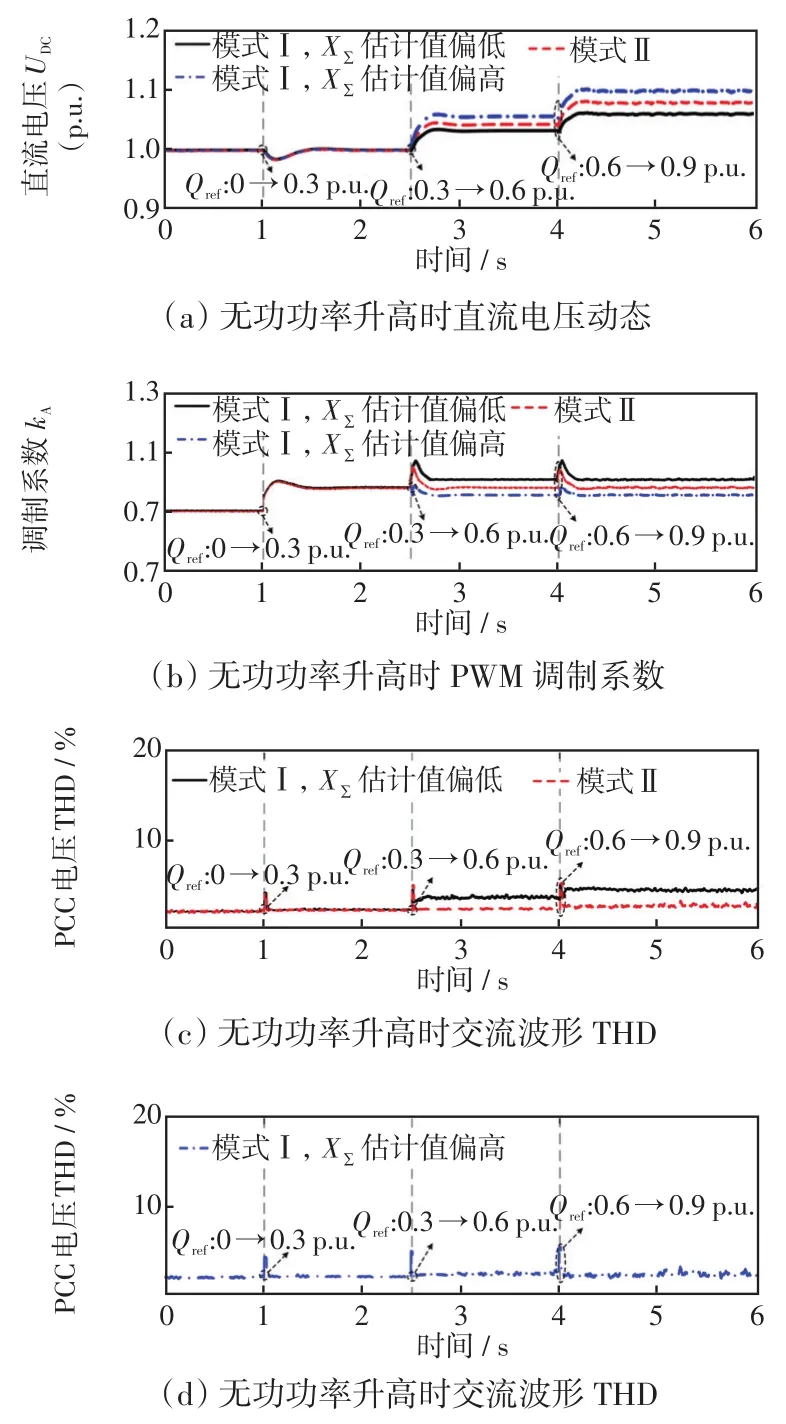
图10 直流电压补偿控制效果Fig.10 Effect of DC voltage compensation control
而当VSC运行在模式II下,由于引入了直流电压补偿控制策略,在VSC输出的无功功率Q>Qlim时,能够令kA实时追踪kA,lim,能保证PWM环节不出现过调制,进而将VSC输出的交流电压波形THD限制在系统允许范围内,此外还可避免UDC的过度升高。由此可见直流电压补偿控制对于系统特性的优化效果。
4.3 直流电压补偿控制PI系数可行域验证
基于表1所示系统参数,图11给出了图8所示的直流电压补偿控制PI系数kpc-kic可行域求解准确性的验证。仍设定初始工况下VSC输出无功功率为0,在t=1.0 s、t=2.5 s以及t=4.0 s时分别使VSC的输出无功功率Q阶跃0.3 p.u.。表1所示系统参数对应的Qlim=0.46 p.u.,因此当t=2.5 s后,Q>Qlim,此时VSC切换为直流电压补偿控制策略。
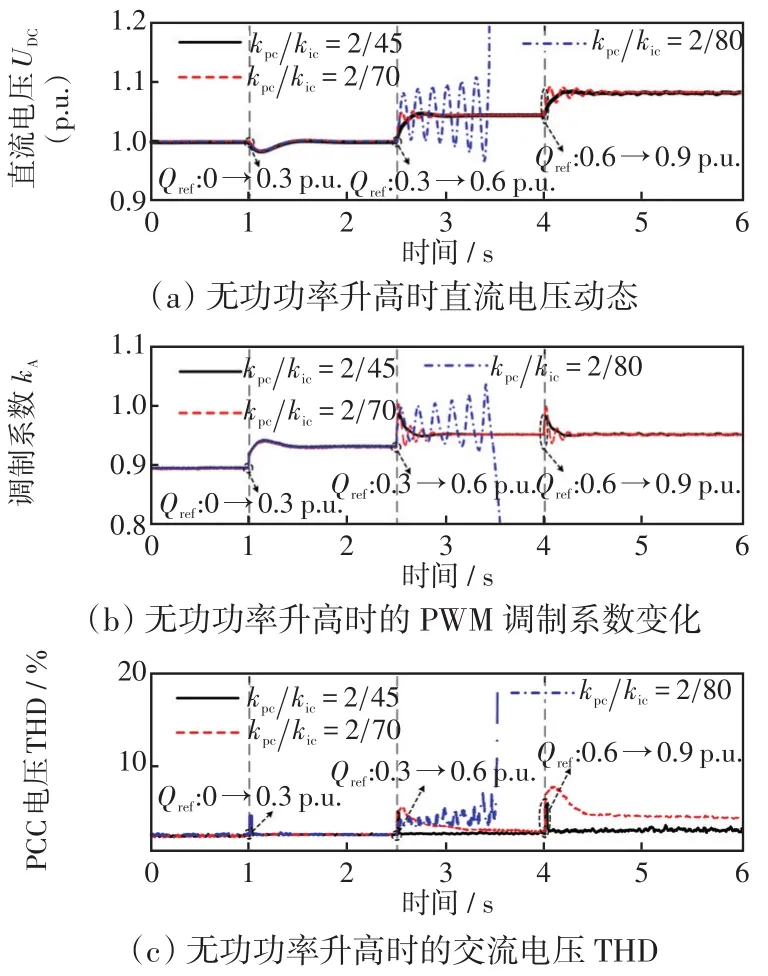
图11 直流电压补偿控制PI系数可行域验证Fig.11 Verification of PI coefficient feasible region under DC voltage compensation control
基于表1所示的系统参数,并分别选取kpc/kic=2/45(在参数可行域内且主特征值对应阻尼ζ接近0.707)、kpc/kic=2/70(在参数可行域内但接近边界)及kpc/kic=2/80(在参数可行域外)3种工况进行验证。以图11(a)为例可见,当控制参数取kpc/kic=2/45时,VSC输出无功功率发生阶跃后,直流电压UDC仅经极小幅度的超调即稳定至新的平衡点。而当kpc/kic=2/70时,UDC需经较长时间的振荡才运行到新的稳定状态。当kpc/kic=2/80时,在Q由0.3 p.u.阶跃至0.6 p.u.时,系统甚至出现振荡失稳的现象。由此验证了文中kpc/kic可行域刻画的正确性。
4.4 直流电压补偿控制对交流电压波动的响应能力
在实际系统运行时,因交流负荷投切等原因,会造成交流系统电压幅值Vs过电压。此时即使不升高VSC的无功功率,在内外环矢量控制的作用下,VSC端口电压幅值E仍会因Vs的上升而升高,若系统仍采用定直流电压控制时,将会导致PWM的过调制,进而使得PCC电压波形THD显著升高。而采用本文所提出的直流电压补偿控制策略,可在Vs升高时通过直流电压补偿控制环节使调制系数kA自动追踪kA,lim,避免PWM出现过调制,进而限制VSC输出波形的THD。
当Vs升高时VSC控制系统的运行策略如下:
(1)实时检测PCC电压幅值,计算并判断定直流电压控制策略下的kA是否超过kA,lim;
(2)若kA超过 kA,lim,则投入式(12)所示的直流电压补偿环节,自适应地提升UDC,同时将kA限制在kA,lim;
(3)当PCC电压幅值恢复至正常水平(即可使得定直流电压控制模式下kA<kA,lim)时,退出直流电压补偿环节,恢复定直流电压控制。
基于上述流程及表1所示的系统参数,图12给出了VSC分别采用定直流电压控制和直流电压补偿控制时,交流电压幅值升高时VSC的响应特性。
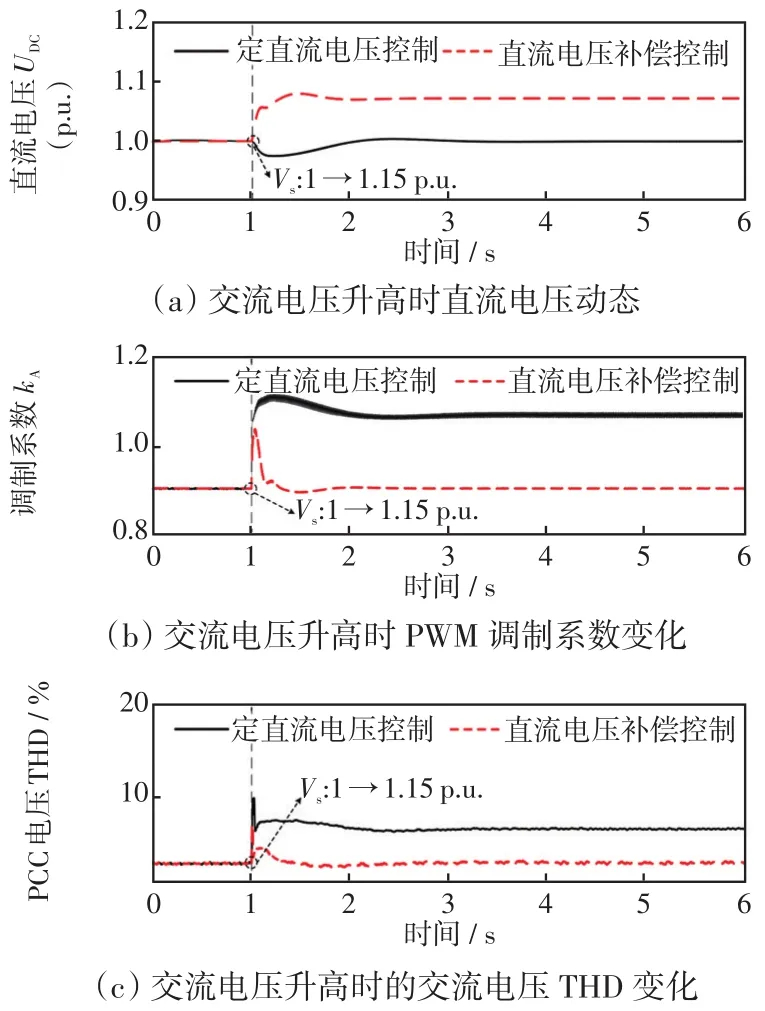
图12 直流电压补偿控制对交流电压升高的响应效果Fig.12 Response of DC voltage compensation control to AC voltage rise
5 直流电压补偿控制策略的经济性分析
本节首先分析与定直流电压控制策略相比,直流电压补偿控制策略对于VSC无功能力的提升效果,进而对比分析与其他改进控制策略相比,VSC采用直流电压补偿控制策略时的经济性。
由式(10)可见,VSC输出无功上限与直流电压UDC、交流电压Vs以及交流系统等效阻抗XΣ有关。设定P=1 p.u.,kA,lim=1,图13给出了VSC采用直流电压补偿控制策略及传统定直流电压控制模式下,输出无功功率上限的比值mQ随Vs及XΣ的变化情况。
以表1所示参数为例,即Vs=1 p.u.、XΣ=0.16 p.u.为例,采用定直流电压控制时,按式(10)计算可得此时对应的VSC无功功率极限为Qlim=0.46 p.u.。而采用直流电压补偿控制策略时,考虑到VSC直流电容、线路绝缘以及保护装置的耐压性,设定直流电压UDC的允许上限为1.1 p.u.时,则交流电压最大允许幅值亦增大至原来的1.1倍。则按式(10)可计算得出此时VSC无功功率极限为Qlim=0.91 p.u.,此时mQ=1.97,VSC输出的无功上限提升接近1倍。由此可见,仅需较小幅度地提高直流电压,即可使VSC的无功输出能力得到较大的提升。结合图13可见,随着交流系统电压Vs上升或阻抗XΣ下降,直流电压补偿控制策略下,VSC的无功能力提升效果会进一步提升。
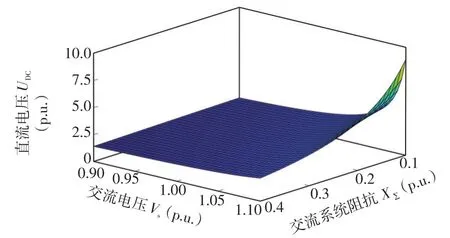
图13 优化控制策略的无功功率提升效果Fig.13 Reactive power improvement effect under optimized control strategy
基于上述VSC无功能力提升效果的分析,表2对比了本文所提出的优化控制策略与其他方案在系统经济性上的对比,可见,所提出的优化控制策略在无需系统投入额外运行成本的前提下,能为交流系统提供大量的无功支撑,具有良好的经济性。
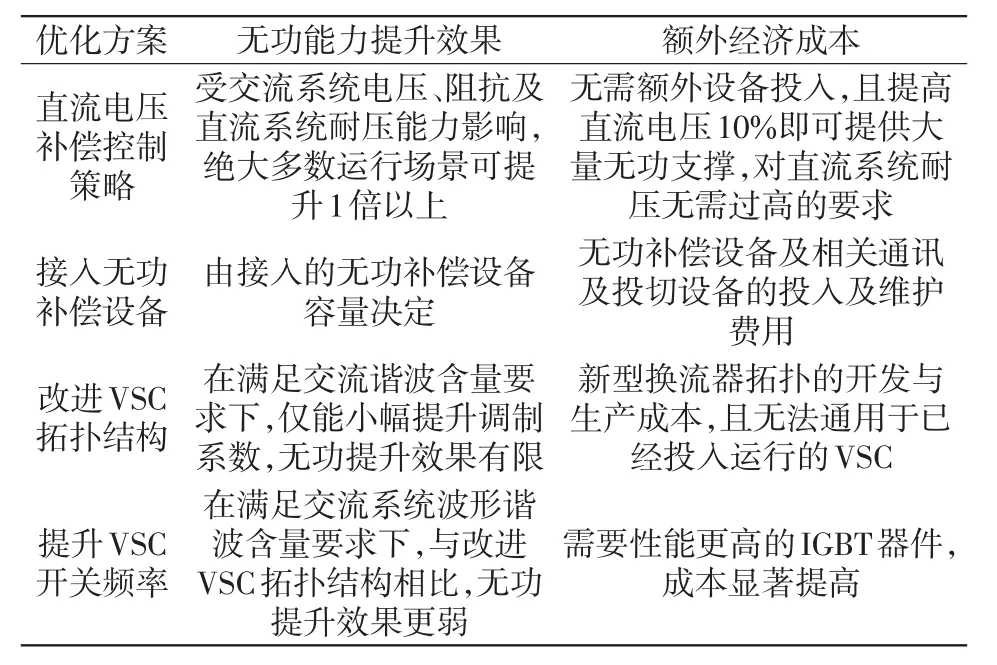
表2 无功提升效果及经济性对比Tab.2 Comparison of Q improvement effect and economy
此外,值得指出的是,本文提出的直流电压补偿控制策略更适合应用于光伏-储能设备接口的VSC。此类VSC的直流侧系统简单,直流设备单一(仅包含光伏组串和储能装置),对于直流系统的电能质量要求相对不高。通过本文提出的改进控制,能够有效提升此类VSC及背后储能装置参与无功支撑的能力,同时在交流系统发生过电压时提高系统电能质量。
6 结论
本文提出了一种直流电压补偿控制策略,能够在VSC为交流系统提供无功功率支撑时,保证PWM环节不出现过调制,实现提升VSC无功功率输出能力的同时,保证VSC输出波形的谐波含量处于系统允许的范围内,本文所提出的优化控制方法具有以下优势:
(1)VSC能够根据调度指令,在系统需要无功支撑时,改变输出的无功功率,参与无功支撑;
(2)基于直流电压补偿控制环节,可避免因交流系统阻抗估计误差和交流系统电压波动而造成的直流电压参考值计算误差所导致的PWM过调制或直流电压过高的问题;
(3)直流电压补偿控制环节还可以在交流系统电压升高时,将VSC输出电压波形的谐波含量限制在交流系统允许的范围内。
(4)无需额外的设备投资,具有良好的经济性。
基于Matlab/Simulink环境下的仿真结果验证了所提出优化控制方法在提高VSC无功功率和保证交流系统电能质量两方面的有效性。随着VSC渗透率的升高,本文所提出的优化控制方法将会在实际系统中有着更广泛的应用场景。
猜你喜欢
山东冶金(2019年5期)2019-11-16
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
人生十六七(2016年14期)2016-12-01
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
黑龙江工程学院学报(2015年5期)2015-12-04
电源技术(2015年11期)2015-08-22
电测与仪表(2015年8期)2015-04-09
现代农业(2015年1期)2015-02-28