卫星导航多干扰源测向定位技术及应用
2023-03-23 11:36:12殷赞甄卫民靳睿敏林子扬王润梓车磊
全球定位系统 2023年1期
殷赞,甄卫民,靳睿敏,林子扬,王润梓,车磊
(1.中国电波传播研究所,山东 青岛 266107;2.西安电子科技大学,西安 717071)
0 引言
针对城市和民航等重点区域复杂电磁环境下卫星导航干扰难以检测和排查的情况,急需提高卫星导航干扰源检测和排查的能力.
首先要快速的发现和检测到干扰.卫星导航信号落地功率较弱,导航接收设备接收卫星信号的同时也容易受到导航频段干扰的影响,导致接收机定位、授时精度下降甚至接锁等,影响用户正常使用.有些弱信号对接收机已经造成影响,但是从频谱上较难发现,由此采用导航信号和频谱信号相结合的干扰检测方法对导航干扰信号进行检测[1].
其次要快速对干扰源进行定位、减缓和消除.针对已出现的干扰信号,通过历史数据比对,快速确定被干扰范围,划定干扰区域,通过机动手段迅速实施干扰检测定位,确定干扰源目标位置,及时进行处置.为此,本文提出以下方法:
1)将测向定位设备搭载于车和无人机等机动平台上,提出了实用的干扰源查找流程,提高响应速度和作业区域.无人机测向设备的使用主要解决了在城市等复杂环境中,由于建筑物遮挡导致地面测向设备无法确定干扰源方位的问题,当车载设备受到较高建筑物的遮挡时,无法检测到干扰信号,此时启动无人机进行高空测向作业,通过无人机测向,初步获得干扰源的大体方位,用于指导地面测向设备的移动方向和部署位置,然后对干扰源进行快速、准确的测向定位,以完成快速排查干扰源的任务,大大提高了排查任务的效率.
2)在城市和民航等重点区域复杂电磁环境下,不仅需具备对多个同频干扰源进行测向的能力,还需要具备高速的实时处理能力以捕获瞬发信号.相关干涉测向体制技术成熟,适应范围广,但缺乏同频干扰测向能力;空间谱测向体制技术先进,但计算复杂度高导致实时性较差.因此,采用单一的测向并不能有效地适应于不同的应用环境需要,因此本文综合运用空间谱估计、相关干涉仪多种测向方法的技术手段,对多个同频信号进行实时的超分辨测向.
将该技术应用于卫星导航干扰源空地协同测向定位系统的设计中,并进行实验验证,实验结果表明,该技术提升了系统测向和定位等性能.
1 卫星导航干扰源空地协同测向定位系统设计
1.1 系统组成
如图1 所示,卫星导航干扰源空地协同测向定位系统由空地协同测向定位系统中心、车载干扰测向定位分系统和无人机载干扰测向定位分系统组成.
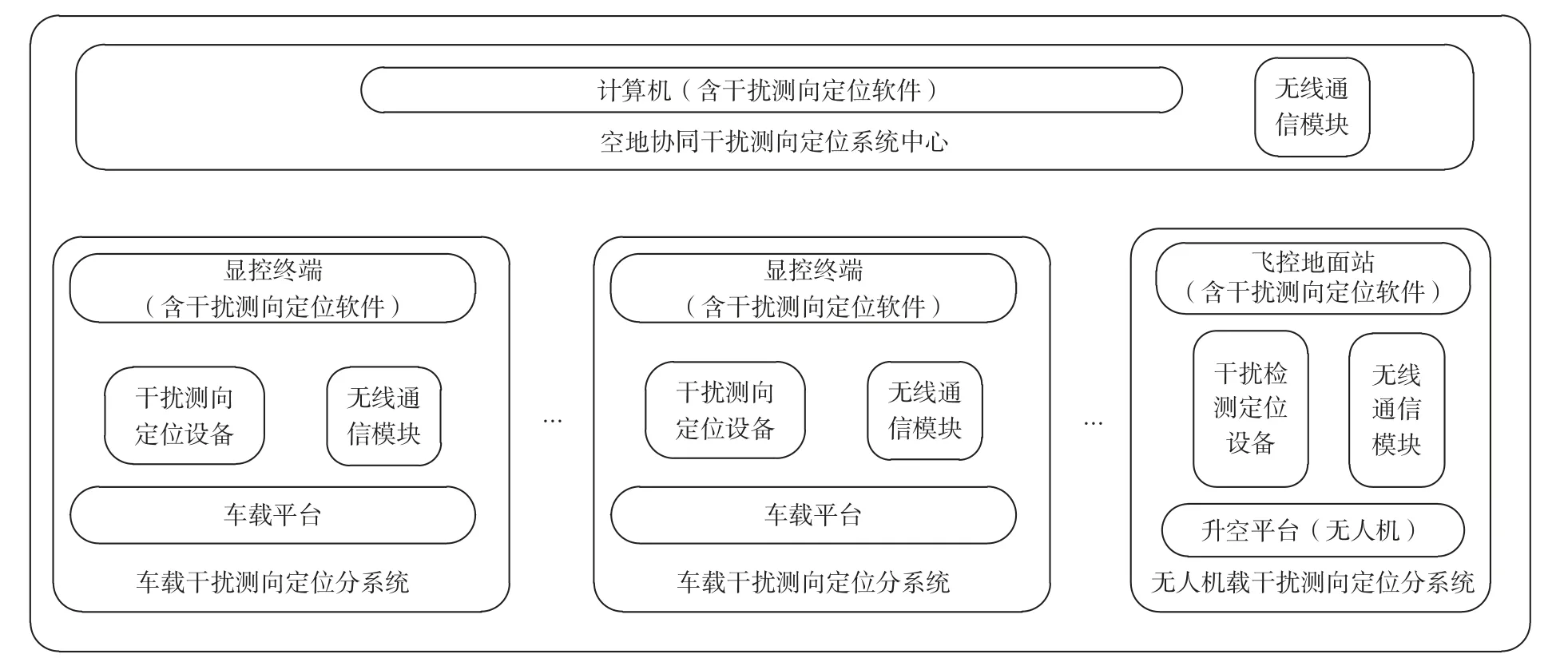
图1 卫星导航干扰源空地协同测向定位系统
1)空地协同测向定位系统
空地协同测向定位系统由计算机(含干扰测向定位软件)和无线通信模块组成.可接收车载干扰测向定位分系统和无人机载干扰测向定位分系统的检测数据,利用空地协同定位算法进行多干扰源测向定位.
2)车载干扰测向定位分系统
车载干扰测向定位分系统由干扰测向定位设备、显控终端(含干扰测向定位软件)、无线通信模块和车载机动平台组成.干扰测向定位设备采用空间谱估计/相关干涉仪体制可实现多个干扰源(含同频)进行高精度测向定位,单个车载干扰检测测向设备可分时多点对干扰源进行方向交汇定位,2 台以上车载干扰检测测向设备可实时对多个干扰源进行方向交汇定位,并可实时给出运动干扰源的运动轨迹.
3)无人机载干扰测向定位分系统
无人机载干扰测向定位分系统由飞控地面站(干扰测向定位软件)、干扰测向定位设备、无线通信模块和升空平台等组成.该分系统可升空到一定高度,扩大对干扰源的检测范围,可弥补因复杂地形环境等因素引起的其他分系统的不足.
1.2 干扰源查找流程
空地协同测向定位系统[2]由无人机载测向定位分系统[3]和车载测向定位分系统(含便携式干扰源逼近式查找设备)组成.无人机载测向定位分系统可放置在车载测向定位分系统的车辆上,必要时无人机升空作业,形成空地协同一体化服务模式,如图2 所示.
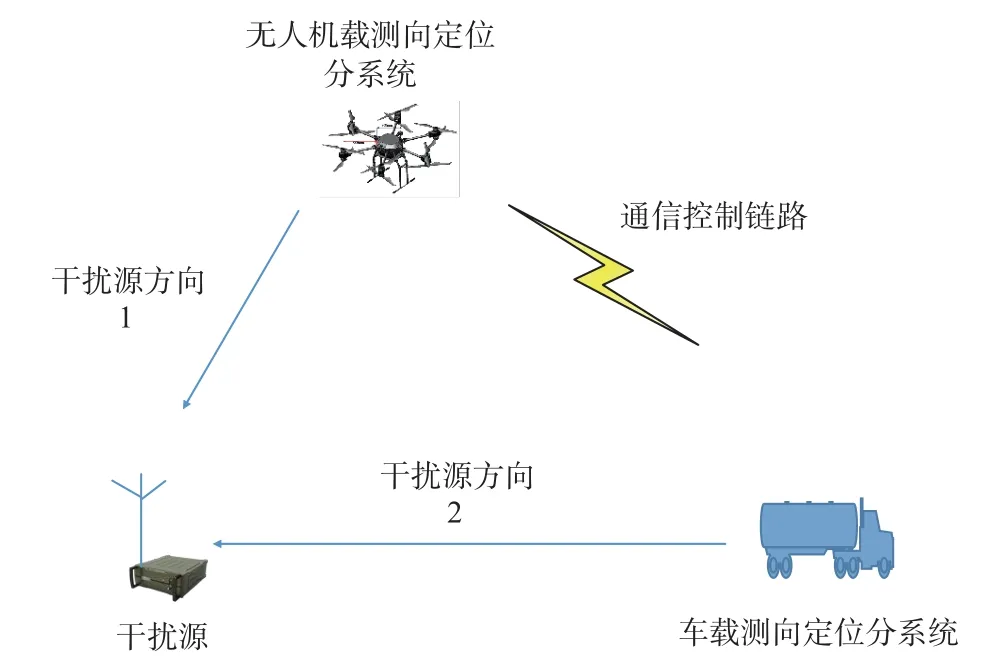
图2 空地协同测向定位模式示意图
系统工作流程如下所述:
1)在重点区域或者重点任务保障区域,当车到达指定区域后,车载式检测测向设备搭载在车辆平台上,可以对行驶区域一定范围内的导航频段干扰信号进行实时检测,并在行驶移动的过程中通过多点测向实现干扰源交叉定位.
2)如果利用车载测向定位分系统无法确认干扰源,可启动机载干扰测向定位分系统对干扰源进行升空测向定位,克服地面设备因复杂地形环境等因素引起的不足,快速对干扰源进行测向定位.
3)如果确认干扰源后,对干扰源特征进行检测识别,对干扰源的影响范围和影响程度进行评估,并录入数据库进行管理.
1.2.1 单车/单机测向定位流程
单车/单机模式可以使用户在只有一台测向设备的情况下,进行多点测向,然后利用多次测向结果进行定位最终确定干扰源的位置.
单车/单机测向定位模式工作流程如图3 所示:

图3 单车/单机测向定位模式流程图
1)进入单车/单机手动界面,软件会自动创建一个排查任务(也支持手动创建任务);
2)创建完成任务之后,用户选定一个测量点1(软件自动命名为测量点1)对干扰信号进行测向操作;
3)在测量点1 完成测向后,根据测量点1 的测向方向,前往第一次测向结果指向的方向附近,然后选定第二个测量点2 执行测向操作;
4)完成两次测向操作之后,点击软件的定位按钮可对当前任务下所有测向结果进行交汇定位获的当前干扰信号发射源的初步位置;
5)同理,可以选择测量点3 进行测向操作和交汇定位,进一步验证初步干扰源位置;
6)根据多次测向交汇获得的干扰源初步位置,可以前往该位置现场勘查并确认干扰源的具体位置和类型,一旦确定干扰源的具体情况之后,可以在界面的初步干扰源图标上单击会弹出确定干扰源具体信息的提示框,根据现场勘查结果修改干扰源的具体信息并确定,即完成一次干扰源排查任务;
7)排查的干扰源结果在界面右侧会生成一个统计列表,用户在有网络的情况下,可以将排查结果上报给指挥中心,记录入库.
1.2.2 空地协同测向定位流程
通过空地协同测向定位来快速排查干扰源,该模式的具体操作流程如图4 所示,具体如下:

图4 空地协同测向定位流程图
1)执行协同干扰源排查任务时,如果车载设备无法获得干扰信号的大体方向,可以启动无人机测向设备进行高空测向,以初步获得干扰信号的大体方向;
2)车载测向系统根据无人机测得的干扰源大体方向,以一定的夹角向干扰源方向移动,同时观察软件的信号检测界面直至能检测到稳定的待排查干扰源频率信号,停车准备组网测向;
3)当两个车载设备位置就绪之后,选定启动一个做个主站,进入软件的协同手动界面,向其他设备发出组网邀请;
4)组网成功后,从站进入被动模式,主站此时可以根据待测的干扰源频率启动测向定位,此时从站会将测向数据通过4G 网络实时发送给主站,主站结合自身和从站的测向数据实时交汇定位,获得干扰源初步位置;
5)排查人员到测量所得的位置区域,进行实地勘查干扰源;
6)一旦确定干扰源的具体情况之后,可以在界面的初步干扰源的图标单击会弹出确定干扰源具体信息的提示框,根据现场勘查结果修改干扰源的具体信息并确定,即完成一次干扰源排查任务;
7)排查的干扰源结果在界面右侧会生成一个统计列表,用户在有网络的情况下,可以将排查结果上报给指挥中心,记录入库.
2 卫星导航多干扰源检测测向和定位技术
2.1 卫星导航信号和干扰频谱结合的检测技术
针对卫星导航信号落地功率较弱,导航接收机在接收卫星信号的同时,容易受到干扰的影响.尤其对于干扰功率较低、干扰样式复杂、干扰持续时间较短等干扰信号[4,5]已经对导航接收机造成影响,但是利用频谱监测设备难以准确检测,由此采用导航信号和频谱信号相结合的干扰检测方法[1]对导航干扰信号进行检测.
利用卫星导航频段干扰信号的频谱数据结合卫星导航接收机输出的载噪比信息、卫星定位状态(对比GNSS 定位结果和抗干扰定位结果,可以有效判定定位状态),用户可分析判断各个导航频段是否存在可疑的干扰信号,并自动生成干扰信号列表,干扰信息列表包括干扰频率、所属导航频段、干扰源调制类型[6]、载噪比等信息.
2.2 改进的多干扰源测向算法设计
采用单一的测向方法并不能有效地适应于不同的应用环境需要.相关干涉仪原理简单,运算速度快但测角精度低,空间谱估计MUSIC 测向精度高,但运算复杂,实时性较差.基于此,结合两种测向算法的优势,提出一种改进算法,首先采用相关干涉仪算法进行初测角,将其结果作为空间谱估计MUSIC 测向算法的引导角,可有效减少空间谱估计MUSIC 算法的运算量,且提高测角分辨力,既满足实时性要求又提高测向精度.
从空间谱估计MUSIC 算法[6]可知,其主要运算是阵列流型矢量的计算以及最后对谱值极大值的搜索上,若进行全向搜索其搜索范围θ∈[0,360],φ∈[0,90],假设搜索步长为1°,则需要搜索360°的一维空间的计算及搜索,需要耗费较长时间.为提高MUSIC算法的运算速度,最为有效的方位即减少角度搜索范围,因而采用相关干涉仪进行初测向,根据其结果做MUSIC 算法的引导角,可有效地提高MUSIC 算法的运算时间.
为保证测角结果的实时性,对算法进行了改进,运算步骤如下:
1)采用相关干涉仪算法[2]进行初测角,测角步长为3°,建立相位差表,相关运算计算出初始方位角为φ0;
2)采用MUSIC 算法精测角,以φ0为引导角,对方位角内,以步长1°进行角度搜索,得方位角Δφ.
以下介绍仿真结果:
1)同时测向的同频干扰源数量仿真
采用的仿真参数如下:天线阵列为9 阵元阵列,半径150 mm,通道不一致度设置为10°,信号入射方向[60,100,180,250],信噪比(SNR)10 dB,频率选择2 GHz,测试对应的空间谱峰图,如图5 所示.
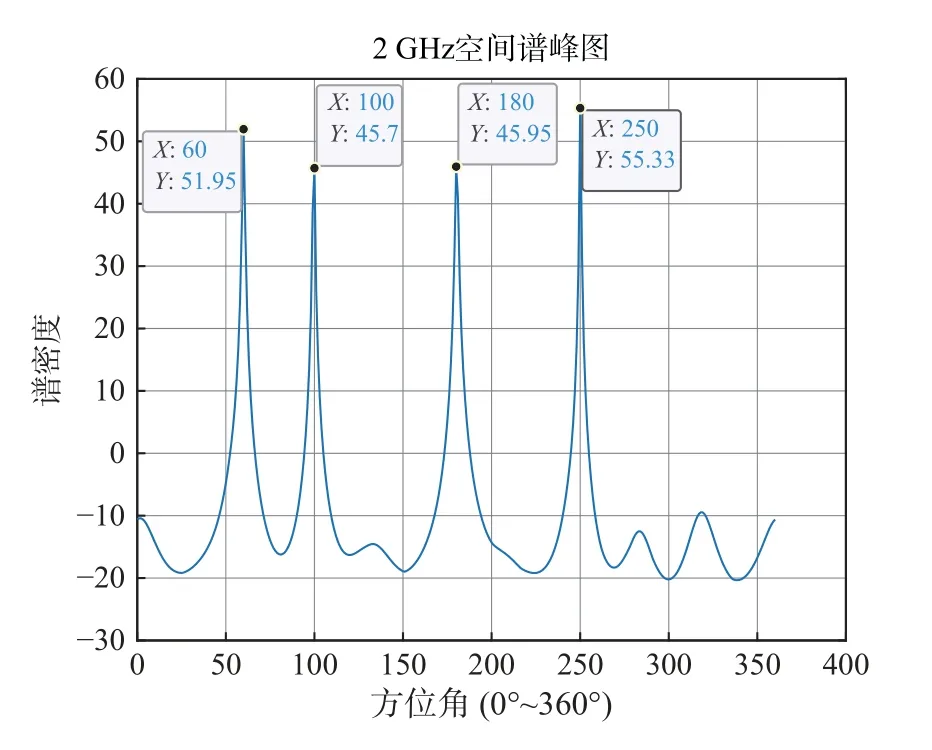
图5 4 个同频多干扰源对应的空间谱峰图
从仿真结果看,改进后的算法可以对4 个同频干扰信号进行测向.
2)测向精度仿真结果
设置MATLAB 仿真条件:均匀圆阵,阵元数为9,在不同信噪比下测试上述各算法,所得结果如图6所示.

图6 不同SNR 下测角误差分析
从仿真结果来看,采用改进的基于相关干涉仪的空间谱估计算法,在测角精度都有较大的提高,既保留了MUSIC 算法的高精度测角,也能满足工程应用要求的实时性.
2.3 交汇定位算法设计
基于角度参数交汇定位是利用两个或两个以上观测站测量的高精度方向角和俯仰角,经过三角运算来确定目标位置的计算方法.
设目标空间坐标为(xr,yr,zr),三个检测测向站的坐标分别为(xi,yi,zi),i=1,2,3,可得到如下关系:
式中:Ri为目标至第i个检测测向站之间的距离;θ和φi分别为目标至第i个检测测向站的俯仰角和方位角.由于θ和φi分别满足如下关系:
于是,可得到目标在x、o、y平面上的坐标的最小二乘解为
3 测试场景和结果
3.1 测试场景
测试场景如图7~9 所示,由卫星导航干扰源、卫星导航干扰源空地协同测向定位系统(包括车载干扰测向定位分系统和无人机载干扰测向定位分系统)组成.

图7 卫星导航干扰源实物图

图8 无人机载测向定位分系统升空作业图

图9 车载干扰源测向定位分系统作业图
3.2 测试结果
3.2.1 同频干扰测向数量和测向精度
当测向天线升起离车顶1.2 m 高度时,经实测,如图10 所示,车载干扰测向定位分系统同频干扰测向数量为4,测向均方根误差(RMSE)精度为1.4°.

图10 同频干扰测向数量
3.2.2 定位精度
1)干扰源位置及干扰类型设置
干扰源实际架设位置:118.837 351°E,37.447 983°N;
干扰类型设置:在卫星导航频段内随机选择1 561 MHz,干扰信号类型分别设置为窄带(带宽10 KHz)、宽带(带宽10 MHz)和脉冲信号(脉宽1 ms,周期0.1 s).
2)检测点位置
通过升空无人机后检测到干扰源大致方向,指引地面车载测向系统分别在A(118.808 393°E,37.461 947°N)和B点(118.803 809°E,37.443 871°N 进行测向定位),检测点A与干扰源之间距离为R=2 994 m.
3)测向交汇定位结果
测向交汇定位结果表1 所示.
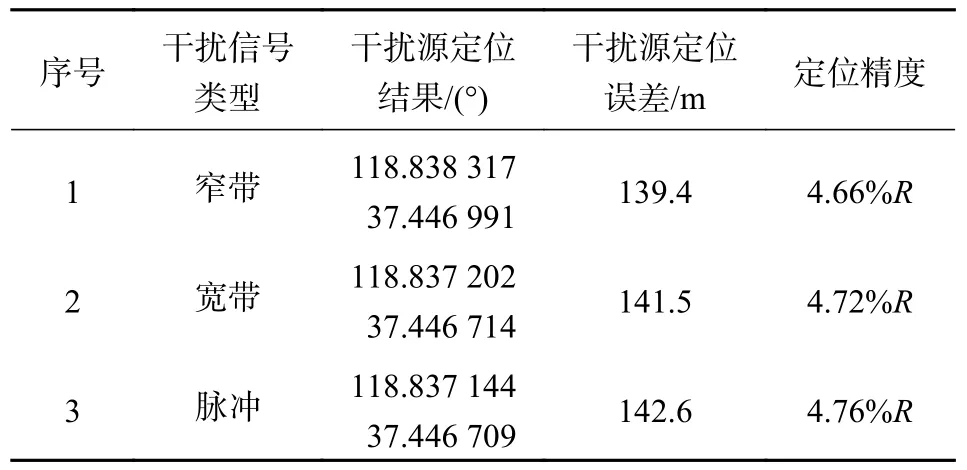
表1 卫星导航干扰源干扰定位精度
4 结束语
本文介绍了一种卫星导航干扰源空地协同测向定位系统,通过优化的干扰源排查工作流程,可以实现单车/单机多点测向定位,也可以实现在无人机的指引下,快速实现空地协同实时测向交汇定位,大大提高了干扰源排查的效率.
本文对改进的空间谱估计和相关干涉仪结合的多干扰源测向技术进行了仿真分析,并将该算法应用到卫星导航多干扰源测向定位系统中.经实测,该系统测向精度在1.5°以内,交汇定位精度达到5%R以内,可以满足实际使用需求.
猜你喜欢
小学科学(学生版)(2021年9期)2021-11-02 05:26:50
小学科学(学生版)(2021年8期)2021-08-30 09:16:28
电气技术(2021年3期)2021-03-26 02:46:08
民用飞机设计与研究(2020年4期)2021-01-21 09:15:44
通信电源技术(2020年22期)2020-03-27 06:48:02
海峡姐妹(2017年11期)2018-01-30 08:57:42
电子制作(2017年10期)2017-04-18 07:22:42
电信科学(2016年9期)2016-06-15 20:27:25
中国交通信息化(2016年5期)2016-06-06 03:51:45
现代工业经济和信息化(2016年8期)2016-05-17 05:37:35