基于优化EFD算法的风电行星齿轮箱故障诊断研究
2023-03-15 10:11:56王国锋张旭东户满堂
天津大学学报(自然科学与工程技术版) 2023年4期
王国锋,张旭东,汪 菲,户满堂
(天津大学机械工程学院,天津 300350)
行星齿轮箱作为一种先进的齿轮传动机构,具有结构紧凑、体积小、承载能力大和传动范围大等优点,在风力发电、航空、船舶、汽车等行业得到了广泛的应用.复杂的结构以及恶劣的工作环境导致行星齿轮箱的重要零部件易出现故障,而零部件故障损坏或失效极有可能会影响整个机械设备或整个机械设备组的正常工作,从而造成巨大的经济损失,甚至危及生命安全.因此对行星齿轮箱进行故障诊断具有重大意义.
由于行星齿轮箱中齿轮结构和齿轮运动模式复杂,导致其信号频谱成分表现十分复杂.且在齿轮故障诊断时,故障有效信息极易被无关信号或干扰成分淹没.因此,利用信号分解获取故障分量的方法在齿轮故障诊断中发挥着重要的作用.信号分解作为一种强有力的信号分析手段,广泛应用于不同领域,如生物医学[1-2]、地震[3]、机械振动[4-5]等.其中经验模式分解(empirical mode decomposition,EMD)[6]是最著名的信号分解方法之一,但其存在模态混叠和端点效应,为了克服这些缺点,Wu等[7]提出了总体经验模式分解(ensemble empirical mode decomposition,EEMD),在 EMD的基础上通过添加白噪声来解决模态混叠问题.当前,国内外学者对 EMD的研究主要集中在理论算法和筛选终止条件等[8-9],然而这些研究方法不能从根本上解决模态混叠和端点效应问题.2013年,Gilles[10]融合了 EMD 的自适应分解理念和小波变换理论的紧支撑框架,提出了经验小波变换(empirical wavelet transform,EWT),为信号处理提供了一种全新的自适应分解思路.EWT将信号的傅里叶谱划分成连续的区间,然后在每个频率区间内构造小波滤波器来提取信号分量.近些年来,诸多学者相继提出了很多频谱分割技术来提升EWT性能[11].但是当干扰成分很强或者信号分量紧邻时,EWT很难准确划分每个信号分量的频段范围.2014年,Dragomiretskiy等[12]提出了变分模式分解(variational mode decomposition,VMD),该方法是在维纳滤波器的基础上发展起来的,但由于VMD假定所有分量都是集中在各自中心频率附近的窄带信号,故当噪声方差超过一定阈值时,VMD算法可能会失效,而且由于需要求解非线性约束优化问题,对于长数据计算非常耗时.傅里叶分解法(Fourier decomposition method,FDM)[13]是一种自适应的非平稳、非线性信号分解方法,FDM 通过高频到低频和低频到高频的两种自适应搜寻方法,将非平稳和非线性信号表示为若干个傅里叶固有频带函数和一个残余分量之和,然而两种搜寻方式的结果可能不一致,即无法确定正确的分解结果.为解决上述问题,Zhou等[14]提出了经验傅里叶分解(empirical Fourier decomposition,EFD),其对非平稳信号和紧邻模态信号能够得到准确的分解结果,由于使用零相滤波器组,EFD解决了模态混叠问题.但是其边界频率使用了局部极值频率,在实际应用中边界频率易陷入局部.
基于上述问题,笔者在EFD的基础上,对其频谱分割技术进行了优化,引入边界获取阈值,以限制分割点的选择,防止陷入局部分割,并利用仿真信号验证优化算法的有效性.实验结果表明,优化后的算法在齿轮故障诊断中能更好地获取故障分量和识别故障频率成分.
1 EFD原理
EFD算法包括两个关键步骤:频谱分割技术和零相滤波器组构建.EFD利用频谱分割技术在[0 , π]的频率范围内构建零相滤波器组来实现信号分解.
1.1 频谱分割技术
在分割技术中,[0 ,π]被划分为 N个连续的频率段,与 EWT中的局部最大值(local maxima)和最低最小值技术(lowest minima technique)不同,ω0和ωN不一定等于 0和π.在频谱分割过程中,提取ω=0、ω= π 和局部极值处的频谱大小作为一个序列,序列中的幅值按降序排列,前 N个最大值对应的频率用[Ω1,Ω2,… ,ΩN]表示,并且定义Ω0=0和ΩN+1=π.各部分的边界ωn解析式为
1.2 零相滤波器组的构建
在 EFD中,通过频谱分割技术得到的边界ωn来构建零相滤波器组.在每个频段中,零相滤波器是一个以ωn-1和ωn作为截止频率的带通滤波器,它没有过渡频段,因此,零相滤波器保留了该段中的主要傅里叶频谱成分,而超出该段的其他傅里叶频谱成分都被有效去除.
待分解信号 f (t)的傅里叶变换可以写为
而零相滤波器组为
通过零相滤波器组,如图1所示,滤波后信号的表达式为
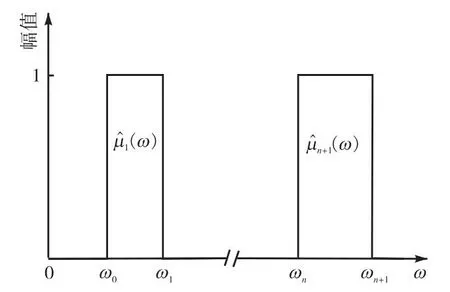
图1 零相滤波器组Fig.1 A zero-phase filter bank
利用傅里叶反变换得到分解后的成分为
1.3 优化EFD算法
原频谱分割技术通过预先设定的 N值来确定分解成分数量,利用局部极值来确定边界ωn,但是在实际齿轮箱信号分析过程中,信号存在调制现象,且调制频率产生的幅值较大时,幅值按降序排列会产生边界频率陷入局部的问题.因此笔者优化了 EFD频谱分割方法,即在原频谱分割技术上引入边界获取阈值,以限制分割点的选择.在优化频谱分割技术中,[0 ,π]被划分为 N个连续的频率段边界,提取ω=0、ω= π 和局部极值处的频谱大小作为一个序列,序列中的幅值按降序排列,然后进行边界频率的筛选,边界频率获取表达式为
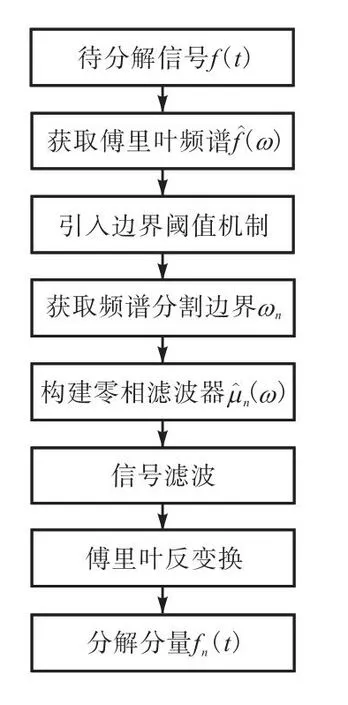
图2 优化EFD算法流程Fig.2 Flow chart of optimized EFD algorithm
2 仿真分析
为验证优化 EFD算法在频谱分割上的有效性,笔者结合实际齿轮啮合特点,构造调频调幅仿真信号来分析优化算法在频谱分割上的效果.仿真信号解析表达式为
设置取样时间为 5s,采样频率为 200Hz,仿真信号在时域、频域上的变化情况如图3所示.由于仿真信号没有添加噪声,因此相对振幅比取值要小才能够限制边界频率陷入局部,故选取N=3、λ=0.01,对比优化EFD与EFD的频谱分割效果.图4为优化的EFD算法的频谱分割,图5为EFD算法的频谱分割,图中红色虚线表示边界频率.
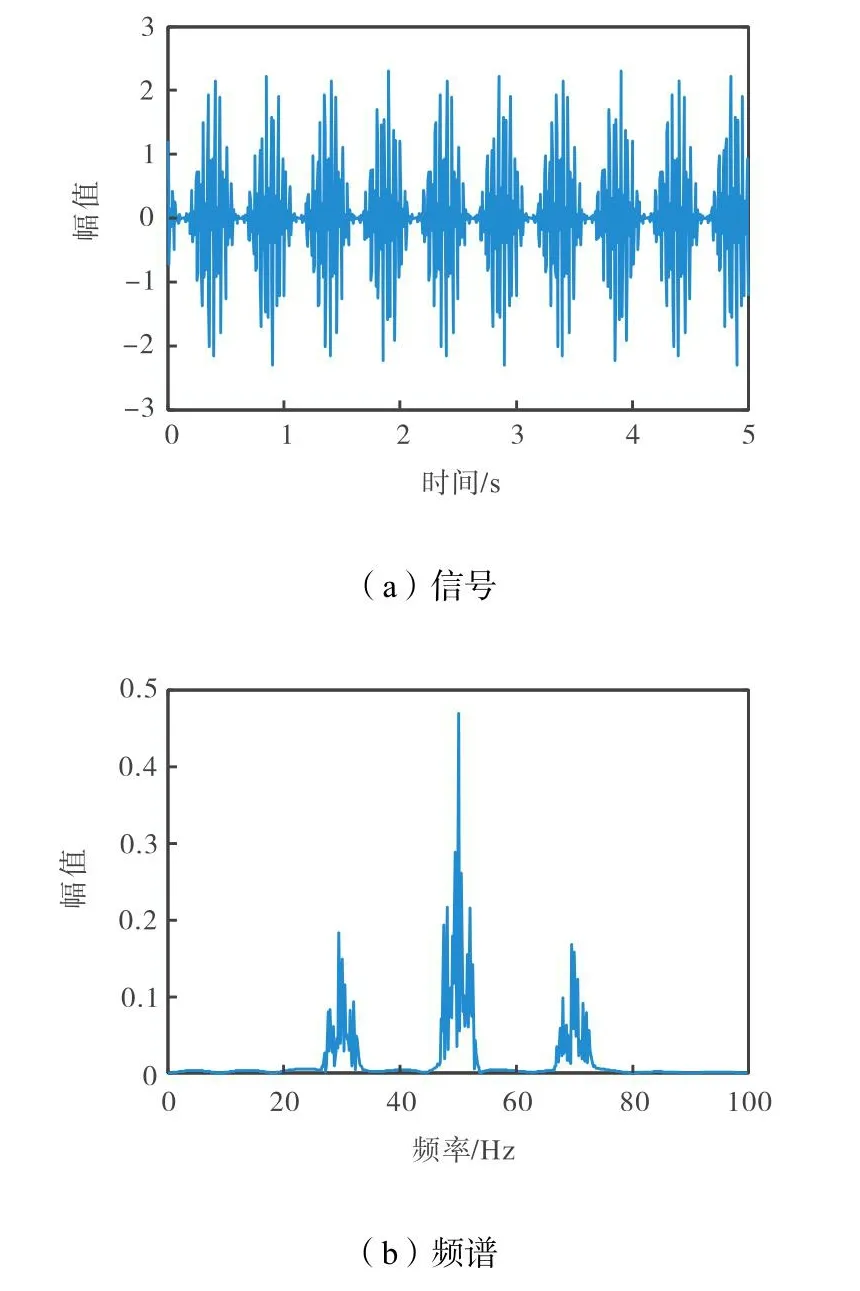
图3 仿真信号Fig.3 Simulation signal
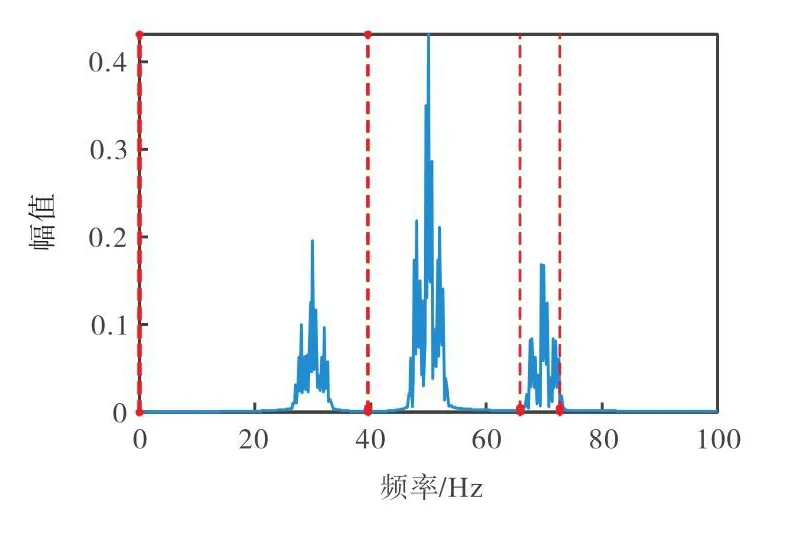
图4 优化EFD算法的频谱分割边界(N=3)Fig.4 Spectrum partitioning boundaries with optimized EFD algorithm(N=3)

图5 EFD算法的频谱分割边界(N=3)Fig.5 Spectrum partitioning boundaries with EFD algorithm(N=3)
如图6~图9所示,当成分数量N为4和5时,EFD算法的边界频率集中现象更为明显,而优化EFD算法无边界频率集中现象,能获取更为准确的边界频率,因此优化EFD算法是在EFD基础上的良好优化.
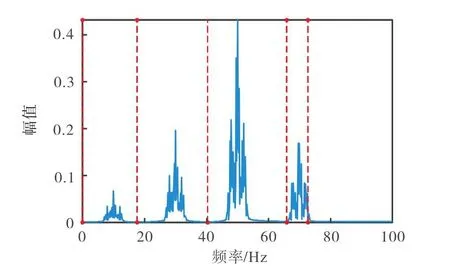
图6 优化EFD算法的频谱分割边界(N=4)Fig.6 Spectrum partitioning boundaries with optimized EFD algorithm(N=4)
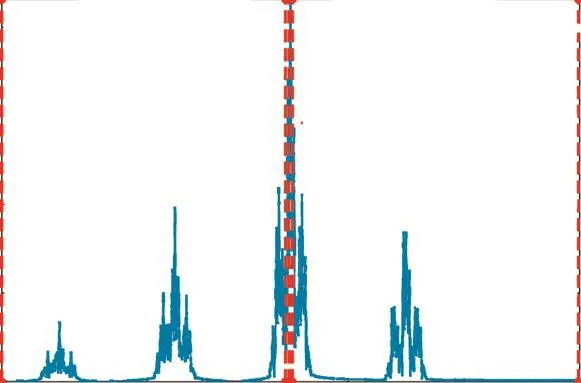
图7 EFD算法的频谱分割边界(N=4)Fig.7 Spectrum partitioning boundaries with EFD algorithm(N=4)

图8 优化EFD算法的频谱分割边界(N=5)Fig.8 Spectrum partitioning boundaries with optimized EFD algorithm(N=5)
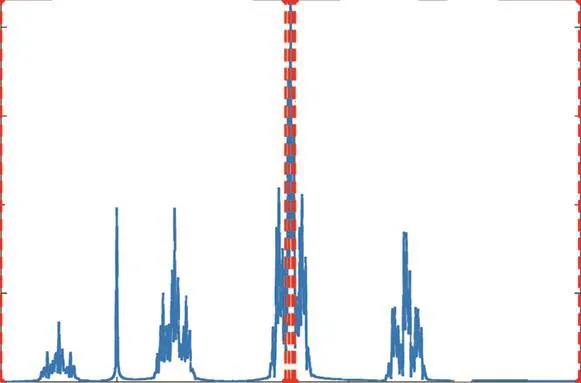
图9 EFD算法的频谱分割边界(N=5)Fig.9 Spectrum partitioning boundaries with EFD algorithm(N=5)
3 故障诊断分析
选用某风电场风机齿轮箱数据进行分析,该风电齿轮箱结构为 3级齿轮传动,2级行星齿轮传动加 1级定轴齿轮传动,结构如图10所示.具体参数为 1级行星齿轮齿数为 39、24和 102(分别表示行星轮、太阳轮及齿圈),2级行星齿轮齿数为 39、24和102(分别表示行星轮、太阳轮及齿圈),定轴齿轮齿数为102和27(分别表示大齿轮和小齿轮).
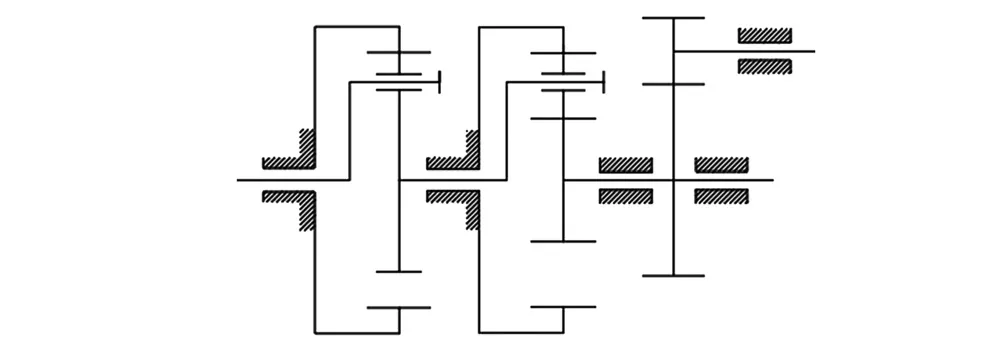
图10 风电机组齿轮箱传动系统Fig.10 Transmission system of wind turbine gearbox
设置采样频率为 20480Hz,采集齿轮箱高速轴转速为 1420r/min的振动加速度数据,图11、图12为振动加速度信号及其频谱.
图11 行星齿轮箱振动信号Fig.11 Vibration signal of planetary gearbox

图12 行星齿轮箱振动信号频谱Fig.12 Vibration signal spectrum of planetary gearbox
计算各级啮合频率为 23.15Hz、121.72Hz和639.1Hz(分别表示1级、2级行星齿轮和定轴齿轮),1级行星轮系故障频率为 1.187Hz、2.984Hz、0.681Hz(分别表示行星轮、太阳轮及齿圈),2级行星轮系故障频率为 6.242Hz、15.216Hz、3.579Hz(分别表示行星轮、太阳轮及齿圈),定轴齿轮故障频率为6.266Hz、23.670Hz(分别表示大齿轮和小齿轮).
图13、图14分别为EFD算法和优化EFD算法在啮合频率639.1Hz附近的频谱分割,从图13中可观察到EFD算法的边界频率陷入局部,而图14中优化EFD算法的频谱分割效果明显.
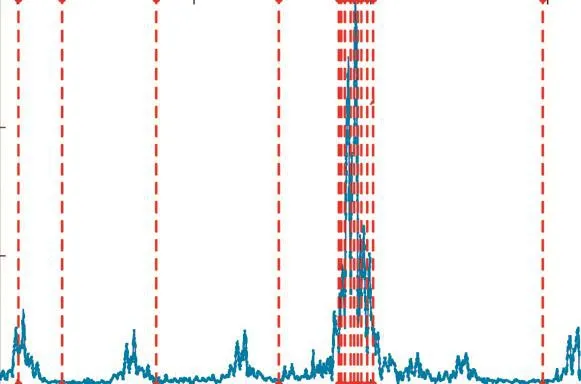
图13 EFD算法的频谱分割边界Fig.13 Spectrum partitioning boundaries with EFD algorithm
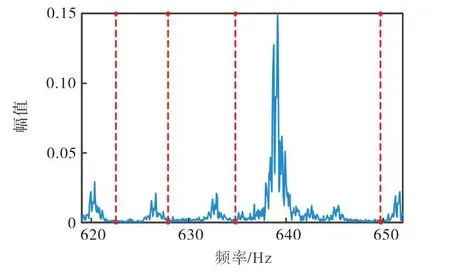
图14 优化EFD算法的频谱分割边界Fig.14 Spectrum partitioning boundaries with optimized EFD algorithm
笔者利用优化 EFD算法进行信号分解,选取合适的分量进行包络解调,如图15所示,可以看见调制成分 0.66Hz、1.17Hz、3.59Hz、6.25Hz 及其倍频.综上分析可知,该行星齿轮箱存在复合故障,即1级行星齿轮行星轮和齿圈故障、2级行星齿轮齿圈故障及定轴齿轮的大齿轮故障.在对行星齿轮箱进行内窥镜检查后,发现其1级行星齿轮行星轮存在齿面剥落和齿圈压痕、2级行星齿轮齿圈擦伤和定轴轮系大齿轮齿面剥落.实际结果与分析结果一致,验证了优化EFD算法的实用性和有效性.
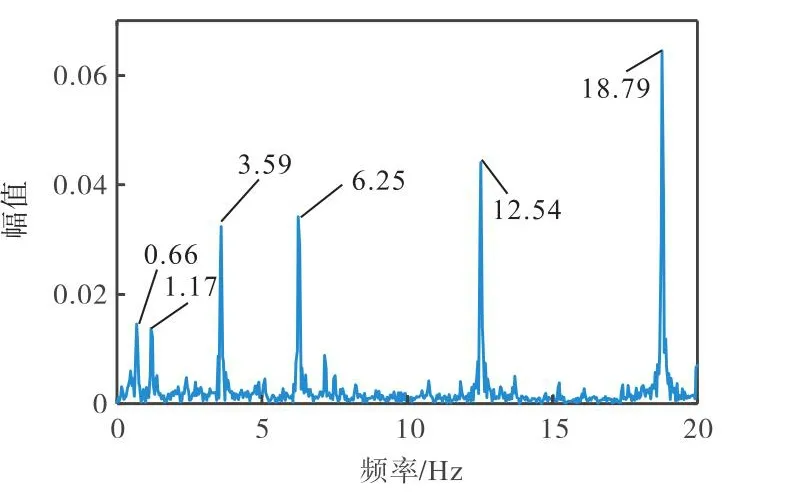
图15 齿轮箱包络解调频谱Fig.15 Envelope demodulation spectrogram of gearbox
4 结 语
EFD具有无模态混叠和紧邻信号分解等优点,但其频谱分割技术在应用中易陷入局部频谱分割的情况,故笔者对EFD的频谱分割算法进行了优化,通过引入边界阈值来对分割点进行选择,使之更加准确地划分频谱,然后利用零相滤波器组得到有效的信号分量.
通过仿真信号和实际风电行星齿轮箱故障信号的对比分析,优化的频谱分割方法解决了 EFD的弊端,克服了原始EFD算法在频谱分割上的不合理性,优化 EFD算法在实际故障诊断中,能获得更加有效的频段,提升故障诊断效果.
猜你喜欢
山东冶金(2022年3期)2022-07-19 03:24:36
空间科学学报(2021年6期)2021-03-09 06:20:14
百科探秘·航空航天(2020年6期)2020-07-09 03:31:06
中学生数理化·八年级物理人教版(2019年5期)2019-06-25 00:58:58
测控技术(2018年7期)2018-12-09 08:58:22
读者(2018年20期)2018-09-27 02:44:48
制造技术与机床(2017年4期)2017-06-22 11:17:44
少儿科学周刊·儿童版(2016年1期)2016-03-14 03:56:27
风能(2016年12期)2016-02-25 08:45:56
无线电通信技术(2015年3期)2015-12-23 11:37:00