
控制屏PQR6402电气线路的改进及其电气保护
2023-03-15 02:55:46张庆丰吕林锋丁高耀
起重运输机械 2023年1期
史 海 张庆丰 吕林锋 丁高耀 陆 凯
1宁波市特种设备检验研究院 宁波 315048 2浙江省特种设备科学研究院 杭州 310013
0 引言
某钢厂发生钢水包倾覆的特别重大事故,经调查发现该起重机控制屏PQR6402的电气控制系统故障及设计缺陷是导致钢水包失控下坠的直接原因[1]。2007年7月,总局发出《关于开展特种设备隐患排查和起重机械专项整治行动的通知》,对在用吊运熔融金属的非冶金起重机械在电动机、制动器、起重量限制器、上限位、超速保护和正反向接触器故障保护等电气系统和防护级别等各个方面提出了整治要求。
该事故的惨痛教训影响到随后更新的GB/T 3811—2008《起重机设计规范》、GB6067.1—2010《起重机械安全规程第1部分:总则》等标准的颁布。现行起重机械检验规则Q7016—2016《起重机械安装改造重大修理监督检验规则》和TSG Q7015—2016《起重机械定期检验规则》中对电气系统的检验要求主要引至GB6067.1—2010《起重机械安全规程第1部分:总则》。鉴于控制屏PQR6402的电气控制线路存在不足,本文通过现行检验规则的要求,对该控制屏的电气线路进行了改进,并通过列举缺相保护、定子异常失电保护与超速保护的异同点及联系点和电动机的保护、线路保护与接地保护的异同点及联系点,表明了在现行检验规则要求下的起重机械电气保护的全面性及可靠性。
1 控制屏PQR6402的电气线路的改进
1.1 电动机的保护
如图1所示,该事故起重机起升控制保护主要通过过流继电器GLJ实现,继电器的通电线圈串联在电动机的定子回路中,一旦电动机定子绕组中的电流达到过流继电器的整定电流(一般为电动机最大启动电流的1.25倍),串接在控制回路中的过流继电器GLJ的常闭触点GLJ(97,98)即断开,使总电源接触器LYJ断电,从而使电动机失电,起到瞬时过流保护的作用。
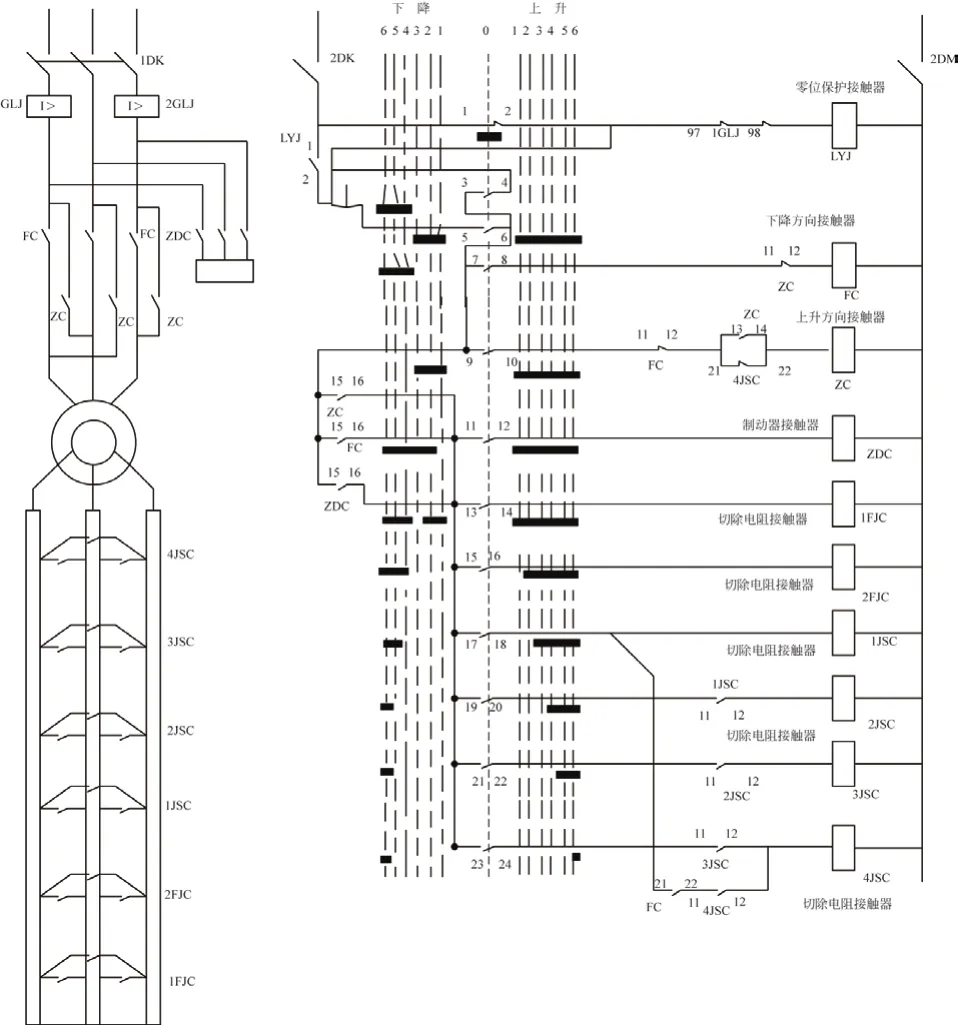
图1 起升控制屏PQR6402电气控制原理图
1.2 线路保护
动力回路的线路保护通过1DK实现,控制回路通过2DK实现。以动力回路为例,当三相动力回路发生短路或接地现象时,动力回路电流增大,空气开关1DK的瞬时电磁脱扣装置能切断动力回路。同理,控制回路线路保护由空气开关2DK实现。若控制回路的接地电流无法达到空气开关2DK的瞬时电磁脱扣电流,则需要空气开关2DK具备热脱扣功能,即热过载功能,以保证控制回路的导线不会因接地而引起绝缘烧损,并防止人员间接触电。因此,从线路保护的全面性出发,要求空气开关2DK同时具备瞬时电磁脱扣和热脱扣功能。值得注意的是,过流继电器GLJ虽然也可起到一定的线路保护功能,但过流继电器GLJ的通电线圈只串入于两相动力回路中,只对这两相回路起到线路保护作用,并未对第3相动力回路起线路保护作用。
1.3 错相与缺相保护
图1所示电气原理图并未设置错相与缺相保护装置,为了满足现行标准和检规的要求,还需增设断错相保护装置。如图2所示,可将断错相保护XJ的一次端接入三相动力电源,将二次端的常闭触点串接入总电源接触器的控制回路中。若三相电源未发生断相或错相现象,常闭触点XJ闭合,否则常闭触点XJ打开,断错相装置动作,使总电源接触器打开,电动机动力回路断开,不能正常启动。
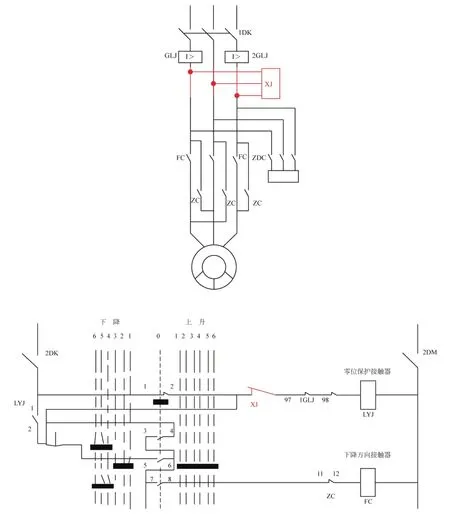
图2 断错相改进图
1.4 零位保护
PQR6402起升控制屏线路显然具备零位保护功能,通过主令控制器的零位触头(1,2)串入总电源接触器LYJ的控制回路中,当总电源失电后,只有当主令控制器回零后,总电源接触器常开触点LYJ才能闭合,总电源才能被重新接通,以此实现零位保护。
1.5 失压保护
失压保护的实现方式有启动按钮和接触器的组合和有带零电压 (失压) 脱扣器的断路器2种,但在该电路图中并未体现这2种形式的失压保护。因此,可以装设带零电压 (失压) 脱扣器的断路器,或采用启动按钮和接触器组合形式的失压保护。只需在总电源接触器LYJ回路中接入1个启动按钮SB1,且总电源接触器LYJ的常开触点LYJ对启动按钮SB1形成自保,如图3所示。
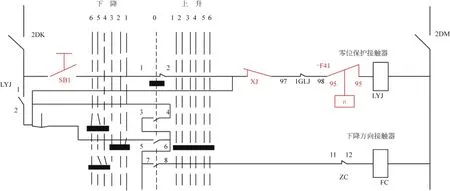
图3 失压保护改进图
1.6 定子异常失电保护
为了防止当起升电动机换向时发生瞬间抢闸现象,原PQR6402起升控制屏线路采取了制动器接触器自锁的方式。然而这种控制线路一旦正反向接触器发生故障,如某钢厂事故发生时正向接触器的常闭触点在起升下降回路接通时本应闭合,但却发生断开,导致起升电动机失电,失去电磁力矩;而制动器接触器由于自保,仍处于打开状态,故导致钢水包自由坠落。
如图4所示,改进后的电气图删除了制动器接触器自锁,增加了断电延时接触器-K91线路,并将-K91延时断开触点-K91(57,58)串入到制动器接触器回路。这样的改进既杜绝了下降3挡转换成下降4挡时的瞬间抢闸情况,又起到了正反向接触器故障保护作用。当挡位不在下降1挡或零位时,电动机失电时间达到断电延时接触器的整定时间后,制动器接触器自动失电,制动器自动抱闸。
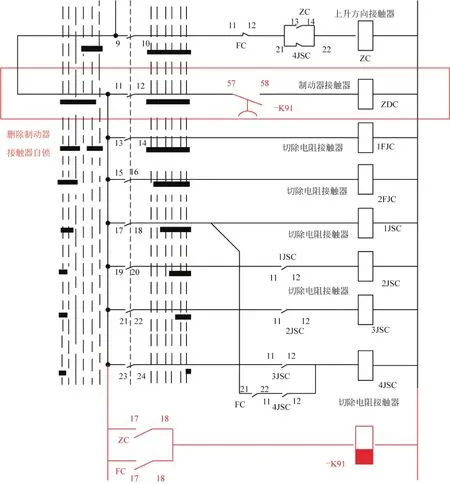
图4 正反向接触器保护改进图
1.7 超速保护
现行的检规规定吊运熔融金属和其他危险物品的起重机(除额定起重量不大于5 t的电动葫芦外)等负载超速会引起危险的起升机构必须设置超速保护,而PQR6402起升控制屏线路并不具备超速保护功能,显然不符合现行检验规则的要求。超速保护的实现方式最常见的是采用超速开关和制动器,超速开关装在电动机轴上,超速后切断电动机的控制电源,使电动机、制动器断电,制动器制动下闸,如图5所示。
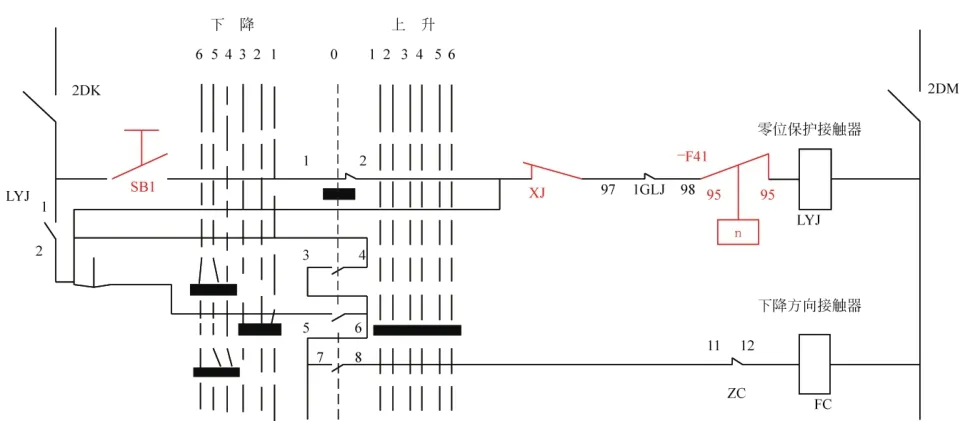
图5 超速保护改进图
2 缺相保护、定子异常失电保护与超速保护
2.1 保护对象不同
缺相保护、定子异常失电保护、超速保护的保护对象是不一样的,缺相保护的保护对象是供电电源,定子异常失电保护的保护对象是起升电动机,超速保护的保护对象是起升电动机或起升卷筒。
2.2 保护起因不同
这3种保护作用的起因亦不同,缺相是由于三相电由一相电或两相电缺失造成的,定子异常失电是由于正反相接触器或调速装置故障导致起升电动机定子失电而制动器依然开闸,从而造成重物自由坠落;超速保护是由于可控电源出现供电不足、电压失效、控制信号故障导致起升电动机电磁驱动力或电气制动力不足,从而造成起升电动机超速。
虽然这3种保护在保护对象和作用起因都不同,但其保护也存在一定联系。若控制电源缺相(如缺相保护失效),会造成起升电动机电磁转矩不足,将导致超速使超速保护动作。若正反向接触器故障导致电动机失电,致使起升重物失速坠落,此时起升电动机上的超速保护开关仍能动作,制动器自动上闸。当然,超速保护生效的前提是超速开关的电源必须单独供电,而非来源于定子电源。由此可见,超速保护在符合一定条件下可以弥补定子异常失电保护上的失效。若PQR6402起升控制屏配备有超速保护功能,即使起升电动机失电制动器也依然开闸,重物就会发生自由坠落。当坠落速度达到额定速度的1.25~1.4 倍时,超速保护起作用,切断控制电源总电源,制动器就能立即抱闸。虽然当时的起升制动闸瓦有磨损老化现象,起升制动力矩减小,但考虑到当时的作业情况,制动器在起升额定速度下还有足够的制动力矩将钢水包制停。倘若在超速保护的整定速度下和当时起升高度下进行抱闸,应能制动住钢水包,只是制动距离较大,钢水包不至于快速自由坠落。
虽然超速保护能弥补缺相和定子异常失电的不足,但三者之间的保护作用前后时间并不相同,对起重机械的保护优先级亦不同。缺相保护优先级最高,缺相保护有效,能防止起升电动机启动;而缺相保护失效,若电动机发生失速,超速保护作用时起升电动机的转速已达到额定速度的1.25~1.4 倍[2],出现了安全风险。显然,从保护优先级看,定子异常失电保护的保护优先级高于超速保护,定子异常失电保护的作用时间超前于超速保护的作用时间,可见超速保护为缺相保护失效和定子异常失电保护失效起到了兜底保护作用。
3 电动机保护、线路保护与接地保护
3.1 保护对象不同
电动机保护、线路保护、接地保护的保护对象不一样。显然,电动机保护的保护对象是电动机;线路保护的保护对象是起重机械的所有外部线路(如起重机械下的外部和内部总动力电源线路、分支电源线路、每个机构电动机的动力电源回路、制动器的动力电源回路、照明电源电路、插座电源等);接地保护的保护对象是起重机械作业人员及其他接触起重机械的人员。
3.2 动作电流整定值不同
1)电动机的保护 瞬时动作电流整定值约为电动机最大启动电流的1.25倍。绕线电动机的最大启动电流一般取2.2~2.5倍的额定工作电流;变频控制的鼠笼电动机一般取1.5~1.8倍的额定工作电流;直接启动的鼠笼电动机可参照电动机产品样本。
2)线路保护 过电流保护装置的整定电流应大于线路上电气装置额定电流的总和或导线的最大允许电流。
3)接地保护 起重机械电气系统的接地方式以TN和TT为主。TN系统接地保护的故障回路短路电流必须大于相线上过电流保护装置瞬时动作电流的1.3倍。TT系统接地保护的故障回路短路电流必须大于漏电断路器额定动作电流的I△n。
由此可见,接地保护作用时接地故障回路中的短路电流已达且超过了相线中过电流保护装置的额定动作电流,而电动机保护作用时额定动作电流与线路保护作用时额定动作电流之间的大小难以明确。虽然三者保护在保护对象和作用起因方面都不同,但三者保护均有过流保护的功能。
电动机保护有瞬反时限动作过电流保护、热传感元器件和热过载保护3种实现形式[3],热传感元件通常指设置在电动机内部的热敏电阻,而热过载保护指通过由双金属片热检测元器件构成热继电器或热脱扣器的断路器实现,这3种电动机保护由过流保护或过载保护实现。
线路保护是指所有外部线路应具有短路或接地引起的过电流保护功能。对于导线面积较小、外部线路较长的控制线路或辅助线路,当预计电流达不到瞬时脱扣电流值时,应增设热脱扣功能[4],即过载保护。
接地保护最常见的有TN和TT接地系统。TN系统是将电气设备的保护导线与供电电源的保护导线(PE线)或保护中性线(PEN线)端子连接,有接地故障时较大的接地故障电流(短路电流)通过PE线或PEN线返回电源,依靠设置的过电流防护电器(断路器或熔断器)在规定动作的时间内自动切断电源。TT系统是将电气设备的保护导线与现场的接地系统直接连接,有接地故障时接地故障电流通过PE线、保护接地极、大地、系统接地极返回电源。由于接地故障电流较小,故障部分电源通过设置的剩余电流动作保护器(RCD)切断[5]。由此可见,未发生接地故障时,PE线无接地故障电流。一旦发生接地故障,PE线中的故障电流使不同的接地电流保护器动作,从而切断电流,起到接地保护作用。因此,接地保护本质也是过电流保护,只不过TN、TT系统中的接地故障电流不一致,过电流保护装置和保护动作电流值不同。
综上所述,电动机的保护其实就是过流保护或过载保护,或是2种保护的复合。线路保护其实就是过流保护或是控制、辅助线路的过载保护,而接地保护的本质就是一种过流保护。虽然线路保护中也有接地保护的含义,但线路保护的接地保护只针对线路,而接地保护主要针对于电气设备。
这3种保护的过电流保护器通常是瞬时动作过电流继电器、热继电器、带瞬时动作过电流脱扣器的断路器、带热脱扣器的断路器、漏电断路器、自动切断故障电源的绝缘监视系统等。由于现行安全技术规范未规定3种保护的过电流保护装置必须独立设置,在同一个分支线路中的电动机保护、线路保护、接地保护可由相同的电流保护器实现,只是这3种保护的实现对过电流保护器的整定值要求不同。
如图6所示,过流继电器GLJ只监测了两相电流,未对第2相电流进行过电流监测,虽然电动机三相电流的有效值基本相同,但仍存在三相电流不平衡、三相负载不一致的情况。因此,从严格意义上讲,该起升电动机分支电路的电动机保护、线路保护和接地保护需要过流继电器GLJ和空气开关1DK的配合实现。
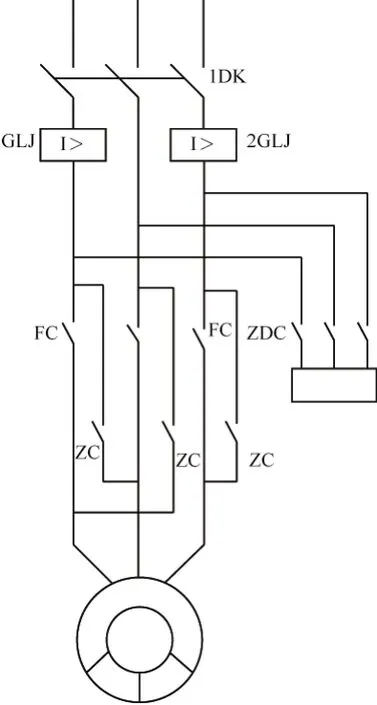
图6 起升电动机分支线路
若要求过流继电器GLJ对该支路中的3种保护起全面自动切断电源的作用,即3种保护的过电流保护装置均为过流继电器GLJ,则建议增加对第2相电源的过电流监测,如图7所示。过电流继电器的动作整定电流取决于3种保护的动作电流的最小电流。该起升电动机为绕线式电动机,电动机保护的动作电流约为该起升电动机最大额定电流的2.5倍,而线路保护的动作电流略大于制动器和起升电动机的额定电流的总和。若电动机绕组相线漏电,接地故障回路的短路电流应大于过流继电器GLJ的动作电流,接地保护最先迫使过流继电器GLJ动作,切断电源,接地保护处于3种保护中的最高级,这与接地保护设置为防止人员触电不谋而合,即人员安全第一;而电动机保护和线路保护的设置为保护设备,是防止过电流保护的误动作,保护级别相对较低。
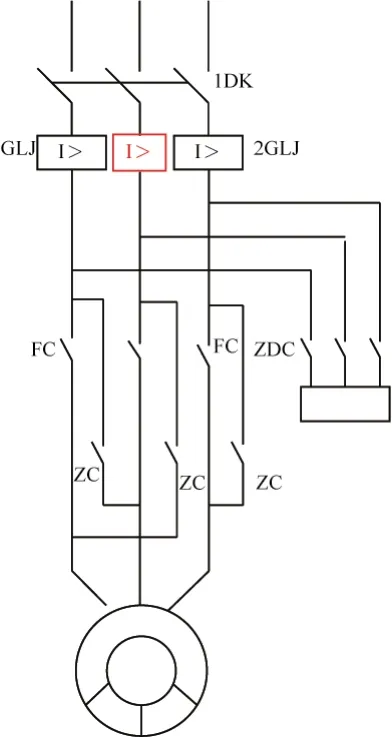
图7 起升电动机分支改进线路
本文所述电动机保护、线路保护和接地保护虽可共用1套过电流保护装置,但其所保护对象和保护机理并不相同。当电动机保护起作用时,线路保护和接地保护不一定起作用,如电动机负载过重、绕组电流增大,达到电动机保护的整定动作电流,但未达到线路保护的整定电流,而电动机负载过重不在接地保护的保护范畴。同理,当线路保护作用时,电动机保护与接地保护不一定起作用,如制动器线圈的两相绕组短路。若电动机的接地保护作用时,可理解为电动机保护和线路保护同时也起作用。由于一旦电动机绕组绝缘破坏,电动机外壳就会带电,从而形成接地故障回路,相线电流增大,达到过流继电器的整定动作电流,此时接地动作电流已达到电动机保护和线路保护作用时的动作电流,相当于电动机保护和线路保护也已作用。
由此可见,3种保护对象分别面向电动机、线路和人员,保护更全面,而各种保护间又有相互作用,相互联系,形成多层次、有冗余度的保护,保护更可靠。
4 结论
1)本文所述起升控制屏PQR6402的电气线路在线路保护、错相与缺相保护、失压保护、定子异常失电保护、超速保护有缺陷,完善后的电气线路符合现行安全技术规范的要求;
2)缺相保护、正反向接触器故障保护与超速保护在保护对象、作用成因和保护原理上不同,但3种保护又有相互联系、相互弥补的关系,若缺相保护和正反向接触器故障保护失效导致电动机失速,超速保护可起到最后的安全兜底作用;
3)电动机保护、线路保护和接地保护在保护对象、过电流保护装置的电流整定值上不同,但3种保护均有过流保护功能。现行安全技术规范未规定电动机保护、线路保护和接地保护必须独立设置,故3种保护可共用1套过电流保护装置;
4)现行起重机械安全技术规范下的各种电气保护涉及多种保护对象,保护更全面,而各种保护又存在一定的保护冗余度,起到了多层次保护,保护更可靠。
猜你喜欢
江苏安全生产(2021年8期)2021-11-05 08:14:56
江苏安全生产(2021年1期)2021-03-19 08:25:20
中国特种设备安全(2021年8期)2021-02-10 06:04:46
建材发展导向(2019年5期)2019-09-09 09:22:50
电子制作(2019年7期)2019-04-25 13:17:20
大电机技术(2018年4期)2018-09-26 03:11:28
电工技术学报(2017年15期)2017-08-31 19:02:23
西部广播电视(2015年1期)2016-01-15 02:05:37
电测与仪表(2015年13期)2015-04-09 11:57:36
电测与仪表(2014年15期)2014-04-04 12:05:18
