
Multi-functional stimuli-responsive biomimetic flower assembled from CLCE and MOF-based pedals
2023-03-14 06:52DongpengSunLinZhengXuejingXuKiyngDuZhiqingAnXunZhouLiChenJilingZhuDongChen
Chinese Chemical Letters 2023年1期
Dongpeng Sun,Lin Zheng,Xuejing Xu,Kiyng Du,Zhiqing An,Xun Zhou,Li Chen,Jiling Zhu,*,Dong Chen,*
a Department of Applied Physics,Hebei University of Technology,Tianjin 300401,China
b College of Energy Engineering and State Key Laboratory of Fluid Power and Mechatronic Systems,Zhejiang University,Hangzhou 310027,China
Keywords:3D assembly Biomimetic structure Synergistic responses Cholesteric liquid crystal elastomer Bragg reflection
ABSTRACT Simulating the structures and behaviors of living organisms are of great significance to develop novel multi-functional intelligent devices.However,the development of biomimetic devices with complex deformable structures and synergistic properties is still on the way.Herein,we propose a simple and effective approach to create the multi-functional stimuli-responsive biomimetic devices with independently pre-programmable colorful visual patterns,complex geometries and morphable modes.The metal organic framework (MOF)-based composite film acts as a rigidity actuation substrate to support and mechanically guide the spatial configuration of the soft chiral nematic liquid crystal elastomer (CLCE) sheet.We can directly program the structural color of the CLCE sheet by adjusting the thickness distribution without tedious chemical modification.By using this coordination strategy,we fabricate an artificial flower,which exhibits a synergistic effect of both shape transformation and color change like paeonia ‘Coral Sunset’at different flowering stages,and can even perform different flowering behaviors by bending,twisting and curling petals.The assembled bionic flower is innovatively demonstrated to respond to local stimuli of humidity,heat or ultraviolet irradiation.Therefore,the spatial assembly of CLCE combined with functional MOF materials has a wide range of potential application in multi-functional integrated artificial systems.
Synergistic responses in morphology,shape and color to external stimuli play vital roles in the process of self-protection,predation or reproduction for nature creatures [1,2].For example,chameleons,beetles,and cephalopods hide themselves from potential predators by adapting their epidermis colors to the surroundings [3–5].Floral morphology and color changes commonly serve as signals to attract pollinators [6,7].Inspired by the natural phenomena,various types of stimuli-responsive materials have been used to recapitulate structural and adaptive traits of living organisms in nature,and promising for a wide range of applications[8–12].For example,the bilayer composite structures incorporating photo-responsive azobenzene materialsviaa bimorph strategy can be used for micro-transportation devices and swing actuator with on-demand controllability and precise control of motion velocity and directions [13,14].Synthetic materials that integrate infrared-responsive nanomonomer or electrically conductive liquid metals are employed to develop novel multi-stimuli-responsive programmable and reconfigurable smart actuators,and promise for use as biomimetic robotics,integrated electronics or biomedical devices [15–17].Furthermore,the doping of thermochromic or fluorescent dyes enables the actuators to simultaneously change their shape and color [18–20],and these synergistic properties are fascinating due to the high similarity to biological tissues.Especially the soft actuators with elaborated photonic structure [21–23],which not only possess robust mechanical responses but also synergistically variable vivid structural colors,are of important significance for the fields such as biomimetic camouflage,communication and optical sensing [24–29].
Cholesteric liquid crystal elastomers (CLCEs) have significant advantages in mimicking living organisms because they possess both the circularly polarized structural color of the cholesteric helix self-assembled by mesogenic molecules and the entropy elasticity of rubbers [30,31].Continuous,reversible deformations and brilliant discolorations can be achieved by triggering the molecular arrangement changeviavarious external stimuli.By now,a variety of artificial systems with switchable optical and topographic patterns have been developed by locally modifying the reflection color,shape and responsive properties of CLCEs [32–34].These stimuli-responsive deformations derived from the reorientation of mesogenic molecules are simply manifested as macroscopic expansion along the helix and shrinkage perpendicular to the helix [35].Although the relatively complex macro morphology and structural colors can be programmed by mechanically induced spatial alignment of mesogenic molecules and distorted helical structure [36–38],they are always limited by the inherent relationship with the stress [39] and these shape-switching responses and colored patterns only exhibit in the direction along the biased stress applied during programming.In addition,the CLCE sheets with soft elasticity are difficult to self-supportviacompressive buckling provided by strain-induced assembly [40].Therefore,the fabrication of independent three-dimensional (3D) CLCE biomimetic device that can be reconfigured with appropriate triggers is still on the way.
Herein,we present a novel method to create complex biomimetic structures with programmable synergistic shape transformations and color changesviaassembling CLCE sheet onto swellable metal-organic framework (MOF)-based actuation substrate.The swellable MOF-based composite is engineered to act as the responsive deformable substrate due to their excellent mechanical properties,programmable morphable modes and multistimuli response properties [41].The self-folding/unfolding of the MOF-based substrate triggered by external stimuli are employed to support and mechanically guide the CLCE 2D sheet with predesigned geometry into a well-defined 3D structure.The reversible shape transformation and accompanying reflection spectrum shift of the assembled structure are studied quantitatively,and the reliability of the assembly behavior is verified.By adjusting the initial local thickness distribution of the CLCE layer,the stimuliresponsive structural color of the petals can be pre-programmed.Different morphable modes of the petals,like bending,twisting and curling can be controllable independently by regulating the mechanical anisotropy of MOF-based composite films.An assembled biomimetic structure with well-designed geometry can bloom like a flower accompanying by brilliant color changes upon exposure to moisture.The assembled biomimetic flower can be used as a spatially resolved sensor array to accurately detect the local stimulating source distribution,including heat and ultraviolet (UV)light,which is also of great significance for realizing the intelligent actuation process accompanied by optical signal feedbacks.
The pre-designed 3D structure is constructed by strain-induced bending of the two-dimensional (2D) sheets with complex geometric patterns (Fig.1a).The components mainly consist of two layers including a CLCE sheet and a MOF-based actuation substrate.Firstly,two six-petal flower-shaped 2D components were created by cutting a CLCE sheet and a MOF-based actuation substrate.Secondly,a commercial sticky double-coated tape was dispensed at the desired locations of the MOF-based actuation substrate to provide instant and strong bonding between the two layers.Subsequently,the 2D CLCE sheet was transferred and stretched to align onto the shaped substrate.Finally,by releasing the pre-strained CLCE sheet,we obtained a sophisticated biomimetic flower with synergistic responses of shape and color to external stimuli (Fig.1b).It is worth noting that the other locations of the components do not contact each other except for the bonding sites.The heterogeneous distribution of the swellable MOF crystals along the vertical direction over the entire actuation substrate creates bilayers with different swelling capabilities.The anisotropic strain over the entire substrate triggered by swelling response of the MOF crystals that derived from the vapors adsorption/desorption makes it selffolding/unfolding.The shape transformation of the flower petals from half-folded to fully expanded is employed to relax/stretch the mechanochromic CLCE thin layer,and resulting in a synergistic color change.The tactic not only bypasses certain constraints set by the underlying physics of the materials on device fabrication,but also is compatible with the most advanced planar technologies.
To achieve the assembly of well-defined bionic structures,one key is to fabricate a CLCE 2D sheet with high elastic and complex color/shape programming.Therefore,two-stage thiol-acrylate Michael addition and photopolymerization reaction were chosen to prepare the CLCE sheet owing to the high conversion efficiency,robust synthesis condition,good processability and elasticity [42,43].Herein,RM257,a well-known diacrylate mesogen,and EDDET (inset of Fig.1a),a dithiol monomer that used as a flexible spacer,were selected for the base-catalyzed thiol-acrylate polymerization,in which diacrylic monomers are bifunctional,resulting in the formation of oligomers through chain extension.In the subsequent photopolymerization,the contained radicals homopolymerize the acrylic endgroups,as the acrylates serve as crosslinkers,and the linear oligomers are cured into a network (see Experimental Section in Supporting information for more details).The prepared CLCE sheet shows a well-aligned planar texture under a polarized optical microscope (POM) and the center wavelength (λ0) of its Bragg reflection locates at 637 nm (Fig.S1 in Supporting information).
As a guide for subsequent 3D assembly,the mechanochromic property and stress-strain relationship of the prepared CLCE sheet are investigated.The relative length is defined asεl=l/l0,wherelis the dynamic length andl0is the initial length,and the stress isσ=F/S,whereSis the cross sectional area orthogonal to the applied force F.A CLCE sheet (10 mm×5 mm×10 μm) was uniaxially stretched using a dynamometer and the color changes were recorded using a video camera (Movie S1 in Supporting information).The shift ofλ0follows the equationλ0=naveP,wherenaveis the average refractive index and the pitch (P) is proportional to CLCE’s thickness,which decreases with stretching as a result of volume conservation [30,44].Therefore,compression of P under stretching causes theλ0of CLCE sheet to blue shift (Fig.2a and Fig.S2 in Supporting information),and nearly fivefold elastic deformation is achieved on subsequent stretching,at which the film tends to be colorless.As shown in Fig.2b,the strain-induced shift ofλ0and the requiredσare as a function ofεl.As the stress increases,the maximum blue-shift ofλ0is more than 200 nm,and the correspondingσis 200 N/cm2.To achieve the structure as shown in Fig.1,during flowering,theεlof the CLCE-based 2D film needs to reachπ/2 when the petals change from folded semicircle to fully expanded strip,and the correspondingσis 19 N/cm2.In addition,we also demonstrated that the structural colors under mechanical action can be directly programmed by adjusting the initial thickness of CLCE sheet (Fig.2c).We found that the thinner thicknesses lead to greaterσand more obvious color changes.The CLCE sheets with sameλ0(630 nm) and different thicknesses (δ)(10 μm,60 μm,100 μm,140 μm) are applied with fixed F (0.01 N),but their blue-shifts ofλ0(Δλ) increase from 33 nm to 119 nm.The highly stress-sensitive mechanochromic behavior of the CLCE sheet inspires us that the stress-responsive complex structural colors of CLCE sheet are easily obtained by adjusting the local thickness without tedious chemical modification.
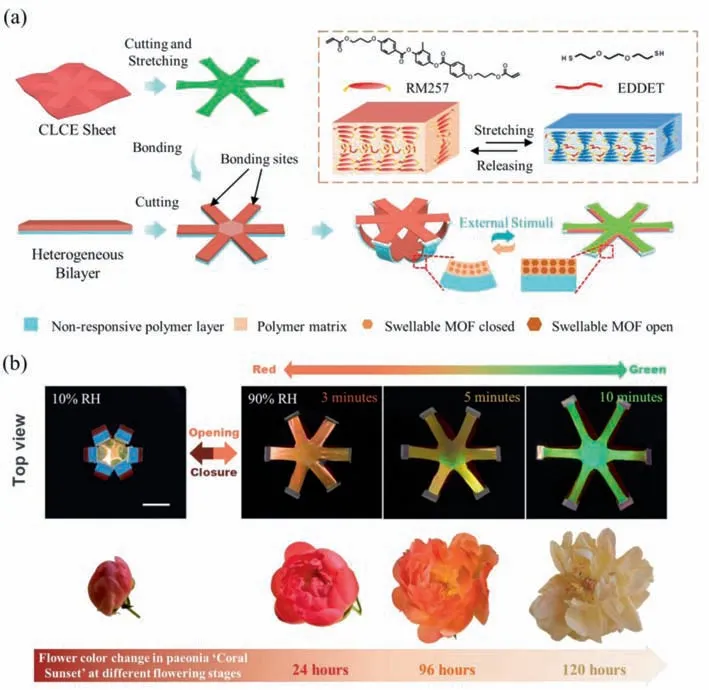
Fig.1.(a) Schematics of fabrication and assembly processes of biomimetic flower consisting of mechanochromic CLCE sheet and swellable MOF-based actuation substrate.The inset shows the chemical structures of the monomers used to prepare CLCE and the pitch of the cholesteric helical structures in the CLCE layer changes under stretching.(b) Photographs of the synergistic shape and color changes of the assembled artificial flower triggered by humidity,which are analogous to the color change in paeonia ‘Coral Sunset’at different flowering stages.The scale bar is 10 mm.
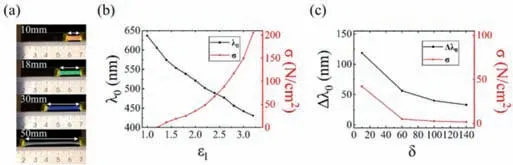
Fig.2.(a) Photographs showing the reversible mechanochromic tuning of the color of the CLCE sheet by uniaxial stretching.(b) The center wavelength of the Bragg reflection (λ0) and the tensile stress (σ) at different strains (εl) of the CLCE sheet.(c) The fixed tensile force (F=0.01 N) induced λ0 shift (Δλ) and corresponding σ of CLCE sheets with different thicknesses δ.
As another key role for the structure assembly,the heterogeneous bilayer with gradient distribution of swellable MOF crystals is innovatively prepared by directly coupling the commercialo-phenylphenol (OPP) tape to the poly(vinylidene fluoride)(PVDF) composite film embedded with swellable MOF crystals (Fig.3a),and then its mechanical properties for structure supporting are investigated carefully.In this part,the active layer with high swelling capacity was fabricated firstly by embedding the synthesized swellable MOF MIL-88A crystals into a non-responsive PVDF matrix according to the reported method (see Experimental Section for more details in Supporting information) [41].The surface topography of the as-synthesized hexagonal bipyramidal microcrystals was characterized by the scanning electron micrographic (SEM,Fig.S3 in Supporting information) and the reversible swelling/shrinkage behaviors of the prepared MIL-88A crystals in response to the change of RH were corroborated by the X-ray diffraction (Fig.S4 in Supporting information).Subsequently,as a non-swellable passive layer,the OPP tape was coupled to the active layer in a closed glove box with RH of 90%.The morphology of the cross section of the heterogeneous bilayer was observed by SEM,it was found that the two layers were well combined by an adhesive layer of about 5 μm thick (Fig.3b).So that the lattice swelling of MIL-88A crystals caused by the adsorption of vapor molecules can be transferred to the unfolding of the heterogeneous bilayer effi-ciently,which is used to imitate the blooming behavior of flowers under relatively high humidity [45].Therefore,as expected in Fig.3c,the obtained heterogeneous bilayer strip self-folds toward the active layer containing MOF crystals due to the desorption of vapor molecules upon drying.On the contrary,the folded strip recovers as the RH increases.
The folding amplitude of a strip with certain geometric relies on the heterogeneous distribution of swellable crystals along the vertical direction,which can be accurately adjusted by changing the relative thickness of the sublayers to realize the design.Therefore,we systematically measured the humidity-dependent self-folding angle (φ) of the heterogeneous bilayer strips (length of 15 mm and width of 5 mm) in a humidity-controlled glove box (Fig.3d and Fig.S5 in Supporting information).When the RH decreases from 90% to 10%,theφincreases gradually until it reaches a saturation value (φs).It is worth noting that the strips are exposed for more than 30 minutes under different humidity to ensure that different bending amplitudes can be fixed by the corresponding RH.The continuous and reversible deformation with the change of humidity proves that the prepared strips have high similarity with the biological tissues.These strips contain active layer of different relative thickness (d),which is defined as the thickness ratio of active layer to the total heterogeneous bilayer.These strips were obtained by adjusting the thickness of MOF-embedded PVDF film while keeping the thickness of the passive OPP tape constant.We also find that theφsincreases as d decreases from 70% to 50%.When d is 50%,theφscan reach up to 500° at RH of 10%.However,the bending amplitude of the strip is too large to cause the two ends to overlap,which is not conducive to stretching the CLCE sheet.In our case,theφsof 190° and the d of 70% is chosen to design the biomimetic flower.At RH of 10%,the chord length(L) between the two ends of the bent strip isL0=9 mm (inset of Fig.3d).As the RH increases,the bent strip recovers to flattened shape with a correspondingLof 15 mm,which is about 1.6 times ofL0.In this case,the tensile force (F) provided by the heterogeneous bilayer was measured by compressing the strip along the chord direction with a dynamometer (Fig.3e and Fig.S5c).The F decreases gradually with the increase of the relative chord lengthεL=L/L0.When theεLis 1.6,the F exerted by the strip is about 0.01 N,which is larger than that required (F=0.006 N) by the pre-prepared CLCE sheet (thickness=10 μm) to achieveεl=π/2.
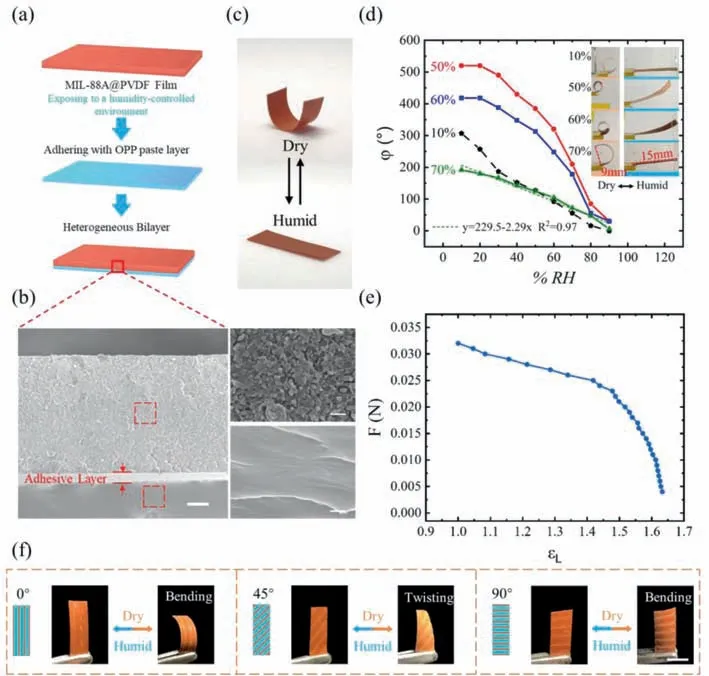
Fig.3.(a) Scheme of the fabrication of the swellable MOF-based heterogeneous bilayer.(b) Cross-sectional SEM images of a heterogeneous bilayer and magnified images of the MIL-88A containing layer (top right) and OPP layer (bottom right).Scale bars: 10 and 1 μm (magnified).(c) Self-folding/unfolding behaviors of heterogeneous bilayer strip triggered by relative humidity (RH).(d) Humidity-dependent folding angles (φ) of the MOF-based heterogeneous bilayer strips with different relative thickness (d,%) of the active layer.The insets show the change of folded strips to flattened strips upon exposure to RH of 90%.(e) Chord length-dependent tensile force (F) exerted by the strip with d of 70% upon exposure to RH of 80%.(f) Humidity-triggered response in the shape of the strips coupled with parallel tapes oriented at 0°,45° and 90° relative to the length axis.The scale bar is 5 mm.
The coupling strategy provides direct approaches to program the folding amplitude and morphable modes of the strip.The latter enables complex spatial configuration of the assembled structure,which is also investigated in our work (Fig.3f).The coupled tapes are created as a set of parallel lines (width=1.25 mm) and coupled on the single active layer.The orientation of the patterned lines on the active layer are set at 0°,45° and 90° relative to the length axis of the strip to demonstrate the control over the morphable mode.For the strips with 0° or 90° lines,drying to RH of 10% causes the strip to roll along its length axis or width axis,respectively.While for the strips with 45° lines,the strip shows a twisting transformation.The expected folding shape confirms that the strip’s folding response can be guided by the design of parallel lines coupled on the active layer,which enables the development of diverse shape transformation.
The mechanical features of the CLCE sheet and the heterogeneous bilayer strip are investigated and compared.To better demonstrate the assembly behaviors with synergistic shape and color changes,we fabricated a simplified deformable flower petal by bonding a CLCE thin layer (10 mm×5 mm×10 μm) on the two ends of the heterogeneous bilayer (15 mm×5 mm×145 μm),as shown in Fig.S6 (Supporting information).The change in humidity was used to demonstrate the stimuli-triggered actuation ability of the strip and the resulting shape transformations as well as the synergistic mechanochromic of CLCE.Upon exposure to moisture,the bent substrate gradually transits to a flat shape,while the CLCE sheet is stretched and undergoes a blue shift in reflection color.
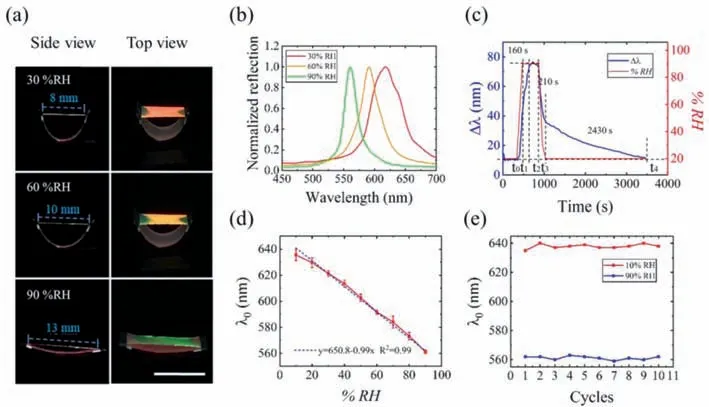
Fig.4.(a) Photographs showing different perspectives of a simplified flower pedal with humidity-triggered synergistic shape and color changes.The scale bar is 10 mm.(b)The reflection spectra at different RH.(c) The response time of the assembled structure.(d) Humidity-dependent λ0 of the simplified flower pedal,and (e) the saturation values in low-high RH cycles.
Fig.4a reveals the shape transformations and the corresponding color changes of the flower petal at different humidity.With the increase of RH from 30% to 90%,the distance between the two bonding sites increases from 8 mm to 13 mm,leading to the blue shift of the correspondingλ0from 620 nm to 560 nm (Fig.4b).The shape and color changes can be synergistically fixed by different humidity,and the MOF-based actuation substrate provides a stable support for CLCE.At room temperature (~25 °C),the time required for the assembled structure to undergo a complete RH cycle between 10% and 90% was measured by monitoring the shift ofλ0(Fig.4c).The initialλ0changes in real time with the increase of the RH until it stabilizes in 160 seconds when the RH reaches 90%.Subsequently,the RH is dropped to 10% and theλ0reduces by 60% of its maximum value in 210 seconds,which then gradually completes in the following 40 min.Fig.4d demonstrates a relative linear relationship betweenλ0and RH,and the results indicate a quite reliable assembly behavior in 10 cycles (Fig.4e).The quantitative investigation suggests that the prepared CLCE sheet can be finely driven by the MOF-based actuation substrate.With this guidance,more sophisticated biomimetic structures have been explored by applying our patterning strategy (Fig.1a),and then exposed to an environment with adjustable humidity.The biomimetic flower appears like a bud at lower RH (Fig.1b).As the RH increases,the CLCE layer is stretched and appears as a blooming “flower” accompanied by a significant blue-shift in the reflection color,resembling paeonia ‘Coral Sunset’at different flowering stages.Conversely,with the decrease of RH,the flower recovers to its closed state and causes the reflection color to red-shift (Movie S2 in Supporting information).
Taking advantages of the independence of the components for assembling,we prove that bionic flowers with mechanically responsive structural color patterns and curlable petals can be assembled by applying the programming strategies.The CLCE sheet with gradient thickness distribution was prepared by a customized mold (center thickness ≈140 μm and edge thickness ≈10 μm) and cut into the designed layout (Fig.5a).For the CLCE sheet with inhomogeneous thickness distribution,since the applied tensile force F are equal everywhere,the largerσdistributes in the thinner region,which consequently results in a more intense color change.The resultant multi-color biomimetic flower is demonstrated in Fig.5b.As the flower blooms,the discoloration of the assembled CLCE layer causes the initially red petals to show a rainbow-like appearance with red color at the center and green color at the edge.Conversely,when the flowers gradually close,the colorful rainbow colors disappear and are covered by the initial red.In order to mimic the diversified flowering actions of natural flowers by curling and opening the petals,as shown in Fig.5c,we design a six-petal flower-shaped responsive deformable structure with 45° lines.Fig.5d shows that under the external stimuli,the CLCE layer follows the twisting transformation of MOF-based actuation substrate and curls.Upon exposure to moisture,the curled petals open and the CLCE layer is guided to unfold.During the blooming process,the petals rotate about 25°,and a rotating flowering behavior accompanied by color changes is realized for the first time (Movie S3 in Supporting information).
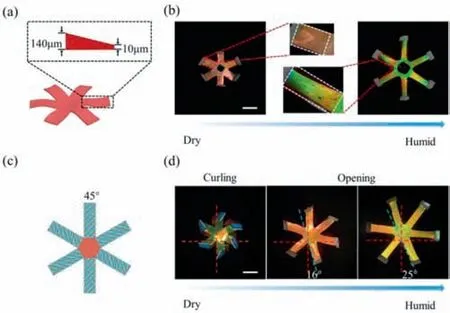
Fig.5.(a) Model of the pre-cut CLCE sheet with gradient thickness distribution.(b)Photographs of the humidity-triggered synergistic shape and color changes of the assembled multi-color biomimetic flower.The scale bar is 10 mm.(c) Schematics of a six-petal flower-shaped MOF-based actuation substrate with 45° lines (reverse side).(d) Photographs showing the humidity-triggered synergistic shape and color changes of the assembled biomimetic flower driven by the shape transformations of MOF-based heterogeneous bilayer strips with 45° lines.The scale bar is 10 mm.
The vapor adsorption/desorption of MIL-88A crystals can also be triggered by temperature and significant photothermal effect [46].By taking advantage of this property,the assembled biomimetic structures could be developed into sensors with capability of spatial resolution and locally controllable UV responsive actuators.As shown in Fig.6a,the local heat source can be demonstrated by the discoloration response of the assembled biomimetic flower petals at different position.An annular thermal stage was placed below the black baffle and the ambient RH was maintained at 70%.When the heat source is located on the right side of the biomimetic flower,petal 2 folds towards the center,causing the CLCE layer to relax in petal 2 and show a noticeable red shift in color.When the heat source is relocated to the left side of the biomimetic flower,petal 2 recovers its initial color,while petal 5 discolors.The temperature distribution of the local heat source was detected by an infrared (IR) camera,and proving the accuracy of the detection of local heat source by the biomimetic flower.The locally controllable UV responsive actuation ability of the assembled biomimetic flower with optical feedback from the integrated CLCE layer is demonstrated in Fig.6b.Upon exposure to ambient RH of 70%,the top petal (*) of the biomimetic flower is irradiated by a UV-visible light (365 nm,irradiance: 125 mW/cm2) at a distance of~5 cm (Fig.6b and Fig.S7 in Supporting information).The slight folding of the irradiated petal towards the center leads to a significant red shift in its reflection color,which could directly be observed by naked eyes.When irradiation is stopped,the biomimetic petal recovers to its original state (Movie S4 in Supporting information).
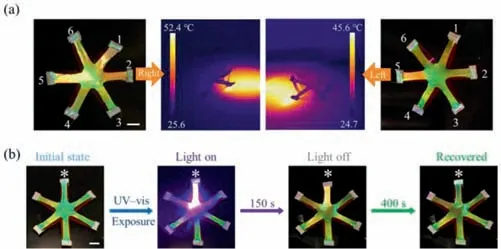
Fig.6.(a) Photographs for the biomimetic flower under local heating and their corresponding thermographic images.(b) Photographs of the intelligent driving process with optical feedback in response to local UV-vis irradiation.The scale bars are 5 mm.
In summary,we demonstrate a novel way for fabricating complex biomimetic architectures with synergistic shape transformations and color changes by employing the actuation of the MOFbased composite film to stretch or twist the mechanochromic CLCE sheet.The complex geometric and optical patterns can be designed preferably on the CLCE-based 2D sheet,which is then assembled on the MOF-based actuation substrate.The morphable modes can be programmed by coupling an anisotropic non-responsive polymer layer.The assembly inherits the advantages of optical programmability,broad geometric diversity and controllability over actuation mode.The assembled biomimetic flower exhibits reversible synergistic color changes and shape transformations triggered by various external stimuli,such as relative humidity,temperature,and UV irradiation.Benefiting from the designable 3D configuration,the resultant biomimetic structures can be developed into multi-functional sensors and UV-triggered structural color actuators.The proposed strategy will provide a simple and versatile platform for the development of biomimetic systems with multi-functionalities based on the synergistic color and shape responses.
Declaration of competing interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Acknowledgment
The financial support of this work by the Natural Science Foundation of Hebei province of China (No.F2020202015).
Supplementary materials
Supplementary material associated with this article can be found,in the online version,at doi:10.1016/j.cclet.2022.02.014.
 Chinese Chemical Letters2023年1期
Chinese Chemical Letters2023年1期
- Chinese Chemical Letters的其它文章
- Diabetic wound healing activated by supramolecular cascade reaction
- MBenes: Two-dimensional transition-metal borides with ordered metal vacancies
- Wet-adhesive materials of oral and maxillofacial region: From design to application
- Diverse catalytic systems for nitrogen-heterocycle formation from O-acyl ketoximes
- Fluorine-containing drugs approved by the FDA in 2021
- The development and application of dual-comb spectroscopy in analytical chemistry