
图迈国产机器人辅助腹腔镜在泌尿外科手术中的安全性研究
2023-03-13 02:30张忠代海涛刘远华马沛莉彭昌伟郭培超胡振兴
微创泌尿外科杂志 2023年4期
张忠 代海涛 刘远华 马沛莉 彭昌伟 郭培超 胡振兴
长江大学附属第一医院泌尿外科,荆州 434023
手术机器人相比腹腔镜,具有3 D 视野、更好的空间显露、震颤过滤、多自由度模拟以及超越人类手腕活动范围的机械臂、更精细的定位和更精准的分离、缝合功能、运动缩放等优势[1],已广泛应用于外科手术中,以泌尿外科手术中应用更显著[2]。目前国内报道的多为达芬奇手术机器人,随着国产机器人研发成功,已经相继进入临床使用。本研究报道了长江大学附属第一医院接受国产机器人辅助腹腔镜手术的20 例患者,以评价国产手术机器人辅助腹腔镜手术的安全性。
1 资料与方法
1.1 一般资料
回顾性分析2022 年8 月至9 月我院泌尿外科接受国产手术机器人(图迈)辅助腹腔镜手术20例患者,男性11 例,女性9 例。平均年龄61.1(33~80)岁,中位年龄63 岁。病种涵盖泌尿系肿瘤、上尿路狭窄、结石,其中肾癌8 例,前列腺癌4 例,膀胱癌2 例,肾上腺肿瘤2 例,腹膜后肿瘤、输尿管狭窄、肾盂结石和脓肾各1 例。纳入标准:⑴年龄18~80 岁;⑵适合行腹腔镜手术;⑶同意签署知情同意书并能遵循医嘱、定期复诊随访。排除标准:⑴合并出血倾向疾病;⑵合并未控制的严重基础疾病。本研究已得到医学伦理委员会审批(LL202285)。
1.2 手术方法
患者均术前行血常规、凝血功能、肝功能、肾功能、电解质等检查,完善彩超、CT、MRI 检查。对前列腺癌患者术前通过前列腺穿刺活检明确病理,分期为T2N0M0;膀胱癌患者术前行膀胱镜检查+活组织检查明确病理,分期为T2~3N0~1M0。对于肾癌、腹膜后肿瘤、肾上腺肿瘤、输尿管狭窄、肾盂结石均能影像学诊断明确。术前充分告知患者关于机器人辅助腹腔镜手术的优缺点,相关风险、手术并发症,以及替代治疗方法,并签署知情同意书。
手术方式以肾部分切除术、前列腺癌根治术、肾癌根治术、膀胱癌根治术为主,膀胱癌根治术均实施盆腔淋巴结清扫+尿流改道,尿流改道方式为回肠通道术、输尿管皮肤造口术。以上手术均使用国产机器人(图迈)辅助腹腔镜,步骤同达芬奇机器人手术。术中使用3~4 机械臂,1~2个辅助操作孔。
1.3 观察指标
主要从机器人操作系统运行流畅度、具体操作的效果(如切割、缝合、止血)等方面评价国产手术机器人(图迈)手术的安全性和有效性。观察指标包括一般资料、术中指标、术后指标。术后随访9 月,统计非计划再入院情况。以上指标均由专人收集和记录。
2 结果
20 例患者均顺利完成手术,中位手术时间为169(108~426)min,中位机械臂安装时间为10.5(7~20)min,中位机械臂腔内操作时间为87(56~295)min,中位术中出血量为56(17~800)ml,中位术后首次肛门排气时间为13.5(6~97)h,术后住院时间为7(5~11)d。1 例行后腹腔肾部分切除术由于术中腹膜破损,操作空间有限,中转腹腔镜手术。1 例前列腺癌根治术中出血800 ml,术中给予输注红细胞悬液4u,新鲜冰冻血浆400 ml。
术中无并发症发生。1 例脓肾切除患者,术后伤口感染,定期换药3 周后伤口愈合。机械臂操作过程中,运行流畅,无明显停顿、延迟反馈等现象,未出现机械臂触碰躯体现象,无机械臂故障,无器械相关并发症发生,术中组织切割、止血效果良好(表1)。术后均未发生Clavien≥Ⅱ级并发症。住院期间无非计划重返二次手术,术后随访9 月,无非计划再次入院和死亡病例。
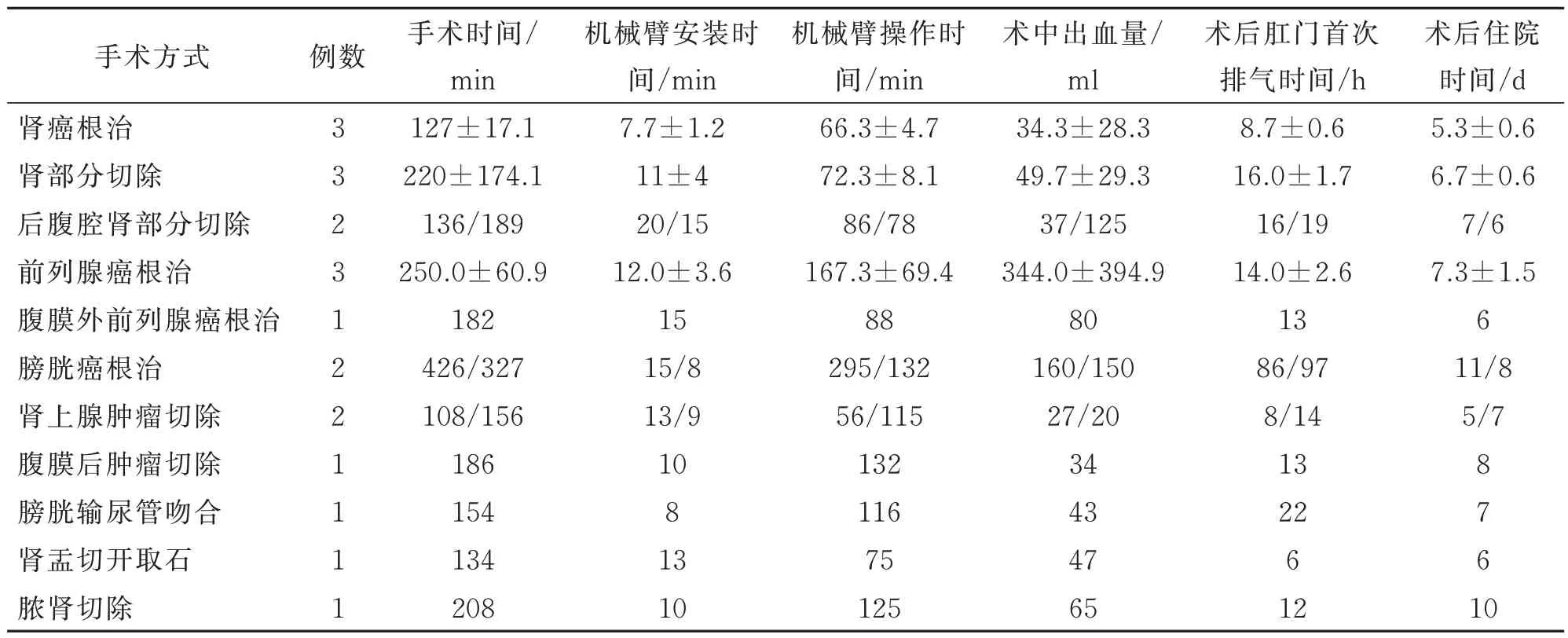
表1 20 例患者手术相关指标情况
3 讨论
以腹腔镜为代表的微创手术已广泛应用于泌尿外科手术,随着医疗水平的进步,对于复杂疑难手术要求越来越高,腹腔镜手术对术者的技术水平提出了更高的要求。近年来以达芬奇为代表的手术机器人已广泛应用于泌尿外科手术中,其保留了腹腔镜微创手术优势的同时,能够实施更加精细的操作,突破了传统腹腔镜手术的局限性,可达到开放手术效果[3,4],使得微创手术得到了跨越式的发展。但达芬奇手术机器人由于手术费用和日常维护费用高[5],在地市级医院开展受到限制,为了手术机器人设备能全面服务外科手术,目前具有自主知识产权的多款国产手术机器人已研发成功,并投入外科手术中。
本研究使用国产图迈手术机器人辅助腹腔镜完成了20 例泌尿外科手术,均未发生Clavien≥Ⅱ级并发症。手术方式涉及肾部分切除术、肾癌根治术、前列腺癌根治术、膀胱癌根治术、脓肾切除术、输尿管膀胱吻合术、肾盂切开取石术、肾上腺肿瘤切除术、腹膜后肿瘤切除术,涵盖泌尿系统常见腔镜手术,从中等难度到高度复杂,包含病灶切除与组织重建。手术均成功实施,无中转开放手术,其中经后腹腔肾部分切除术1 例因腹膜破裂,手术空间受限,中转腹腔镜手术。1 例前列腺癌根治术中出血800 ml,术中给予输注红细胞悬液4 u,新鲜冰冻血浆400 ml。术中无并发症发生。1 例脓肾切除患者,术后伤口感染,定期换药3 周后伤口愈合。
机械臂操作过程中运行流畅,无明显停顿、延迟反馈等现象,无机械臂故障,无器械相关并发症发生。为保证更清晰的视野,术中需灵活调整镜头机械臂,在操作过程中镜头机械臂易到达极限位,活动范围受限致手术视野变窄,同时机械臂被锁住可延长手术时间。相比普通或3 D 腹腔镜,腹腔镜具有灵活摆动镜头位置及方向的优势,可随时调整手术视野,保持操作部位清晰。
目前机器人辅助腹腔镜手术在泌尿外科手术中应用最多的为前列腺癌根治及肾部分切除术。对于前列腺癌根治术,机械臂灵活的操作能协助保留性神经,对于术后尿控功能及勃起功能的恢复具有较好的效果。周骏等[6]研究报道“连续6 针缝合+悬吊法”行膀胱颈尿道吻合,可明显减少术后吻合口狭窄及尿失禁的发生。目前前列腺癌根治术采用经腹膜途径以及腹膜外途径均可完成。为避免术中机械臂相互碰撞导致操作不变或出现机械臂相关不良事件,机械臂Trocar 布局要求相邻2 个Trocar 距离8 cm 以上。由于机械臂Trocar 布局范围广,前列腺癌根治术在建立腹膜外腔隙时容易导致腹膜破裂,术中可能需改行经腹腔途径,增加手术时间。琚官群等[7]报道“2+2”Trocar 分布法经腹膜外机器人前列腺癌根治术具有较好的效果。本研究经腹膜外前列腺癌根治术1 例因腹膜破裂,操作空间受限,后改为经腹腔途径,手术顺利完成。
对于肾部分切除术,由于后腹腔空间有限,术中常出现腹膜破裂,导致操作受限,增加手术难度。陈晶等[8]报道了经腰腹联合入路,保留了经腹腔途径的大空间优势,为机械臂的操作提供了宽阔空间,同时具备了经后腹腔途径更容易暴露肾动脉的优势,减少术中出血,节省手术时间。本研究2 例肾部分切除术经后腹腔途径,术中机械臂Trocar 布局位置有限,1 例术中导致腹膜破裂,手术空间受限,中转腹腔镜手术,可能与术者实施后腹腔肾脏手术经验相关。该例术中机械臂发生碰撞,缺乏力反馈,操纵台继续操作时机械臂瞬间发生位移幅度大,甚至机械臂角度受限后被锁住,术中器械相关并发症可能性变大。经后腹腔途径手术,镜头机械臂容易到达极限位,活动范围受限致手术视野变窄。高学林等[9]报道机器人后腹腔入路肾肿瘤部分切除术安全、可行,对于内生及外生型肿瘤均具有较好的手术效果。对于肾脏背侧及外侧肿瘤,以及既往存在腹部手术史的患者,后腹腔入路更具优势,可以轻松直接显露肾动脉及肿瘤,并减少术中对肠道的干扰,但腹膜破裂后会存在手术空间受限的困境[10]。
本研究中位术中出血量为56(17~800)ml,术中未出现大出血,与能量平台具有较好的切割止血效果相关。李学松等[11]报道国产机器人辅助腹腔镜T1期肾肿瘤行肾部分切除术,中位出血量为10 ml。Fan 等[12]报道机器人辅助腹腔镜前列腺癌根治术中位出血量为50 ml。黄熠龙等[13]报道机器人辅助腹腔镜膀胱癌根治术平均出血量为209 ml。中位术后首次肛门排气时间为13.5(6~97)h,膀胱癌根治术涉及肠道手术,术后肛门排气时间延长,术后住院时间为7(5~11)d,住院期间无非计划重返二次手术、再次入院和死亡病例。
本研究尚有不足:⑴样本量偏少;⑵缺乏同一手术方式对比分析;⑶缺乏长期随访结果,本研究随访时间10 月。⑷由于中心此前未使用过其他品牌机器人手术设备,机器运行流畅程度及视野宽阔程度仅和普通或3 D 腹腔镜对比。因此,需联合多中心,进行前瞻性、随机、平行对照和长期随访研究。综上所述,国产手术机器人“图迈”在泌尿外科腔镜手术应用中可行、安全有效。
猜你喜欢
时代英语·高三(2022年3期)2022-11-10
现代泌尿外科杂志(2022年7期)2022-08-01
现代泌尿外科杂志(2022年6期)2022-07-06
现代泌尿外科杂志(2022年5期)2022-06-09
大电机技术(2021年3期)2021-07-16
中外文摘(2020年13期)2020-08-01
家庭医学(下半月)(2020年3期)2020-05-30
家庭医学(下半月)(2020年3期)2020-05-30
家庭医学(下半月)(2020年3期)2020-05-30
时代英语·高三(2019年4期)2019-09-03
