基于BP优化DBN算法的数控锻床传动主轴故障识别
2023-03-09 03:48郑州电力职业技术学院机电工程系河南郑州市451450薄青红
石河子科技 2023年1期
(郑州电力职业技术学院,机电工程系,河南郑州市,451450)薄青红
高速数控锻床已经成为当前加密各类精密机械部件的重要设备,对于各国工业化水平起到了关键作用[1-2]。如何提高机床控制精度并达到更高生产效率也获得了越来越多研究人员的关注,其中最关键的因素确保传动主轴可以保持稳定、安全工作状态。针对传动主轴运行过程开展故障检测分析,提早识别故障类型是预防机械故障与确保整体设备安全性的一项重要研究内容[3-4]。
深度置信网络属于一类典型深度学习算法,非常适合进行设备故障识别分析,根据DBN理论诊断飞机发动机运行故障,由此判断飞机发动机的运行性能[5]。黄续芳等[6]设计了一种以DBN融合后构建的新算法,对于工业大型发电机组故障识别方面获得了更高故障识别精度,从而更准确预测设备潜在运行问题。
本文在DBN基础上经过优化后再将其用于诊断传动主轴故障,此方法是通过建立新激活函数来消除神经网络对于反向传播产生的梯度缺陷。
1 DBN方法
深度置信网络(DBN)中包含多层受限玻尔兹曼机(RBM),并在外层设置反向传播网络(BP),如图1所示[7]。
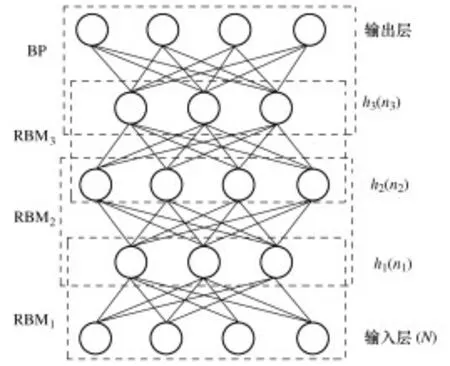
图1 DBN结构示意图
假定RBM结构包含可视层神经元数量为n,隐藏层神经元数量为m,以v=(v1,v2,…,vi)与h=(h1,h2,…,hj)表示可视层与隐藏层的神经元集合,构建得到以下的RBM能量函数:
其中,θ={w,b,d};wij表示可视层i与隐藏层j之间的连接权值;bj表示隐藏层hj偏置参数。
设定v与h联合分布如下:
由于RBM具备层间全连接与层内无连接特征,因此可通过联合分布方式计算出v与h条件概率。
正向阶段中由可视层获得隐藏层的概率如下:
进入反向重构阶段后,由隐藏层获得可视层的概率如下:
通过DBN训练来实现DBN故障识别优化并确定最优w、b,由此获得最低能量误差的RBM,从而达到稳定状态。为缩短RBM网络训练时间并减小震荡幅度,本实验根据权值动量建立RBM加速学习模型,同时运用权值动量和CD算法实现参数的优化。
进行反向微调时通过以下式子对参数进行更新:
将DBN的预训练过程理解成调整各层RBM权值的过程,但不能确保获得最优的全局DBN参数。可以选择BP算法微调网络,由此得到全局最优网络参数。在上述过程中结合具体误差对RBM层参数进行调节,由此实现DBN的整体微调功能,实现DBN故障识别性能的显著提升。
2 基于DBN的传动主轴故障识别
通过发挥DBN优势并结合滚动轴承运行参数特征,采用DBN算法诊断传动主轴的运行故障,图2给出了传动主轴故障的具体诊断流程。
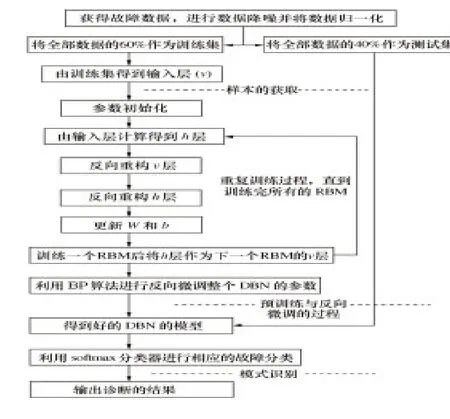
图2 传动主轴故障识别流程图
DBN故障识别流程,以DBN模型对传动主轴进行故障识别的流程如下[8]:①对各工况的传动主轴滚动轴承进行振动信号采集,再对其经验模态分解获得IMF分量,通过EMD阈值对IMF分量进行降噪,再重构上述IMF分量,由此获得降噪信号。接着通过傅里叶转换与归一化方法构建训练集与测试集;②DBN参数初始化,图2给出了设定的权值、隐藏层、偏置参数以及各层包含的神经元数与学习率;③数据预训练,先在DBN中输入训练集数据,根据吉布斯采样原理,通过输入层v确定隐藏层h,再通过反向重构隐藏层h的方式建立输入层v,再以反向重构输入层的方式确定隐藏层h,按照上述方式重复处理后直到完成所有RBM层的训练;④利用监督BP算法对全局DBN进行反向微调;⑤采用训练后的DBN诊断传动主轴故障,同时利用softmax分类器识别输入故障。
3 实验分析
3.1 数据集选取
本实验选择轴承数据集作为测试参数。此数据集中包括电火花对轴承外圈、内圈、滚珠部位产生的故障,同时记录的轴承振动信号获得同时包含故障参数和正常参数的10种故障数据集。分别通过三种负荷轴承故障参数建立数据集。本次总共选择2048个数据点进行故障划分,使各类故障都包含200个样本。从而更准确反馈实际过程的故障复杂性,统计得到表1的结果。
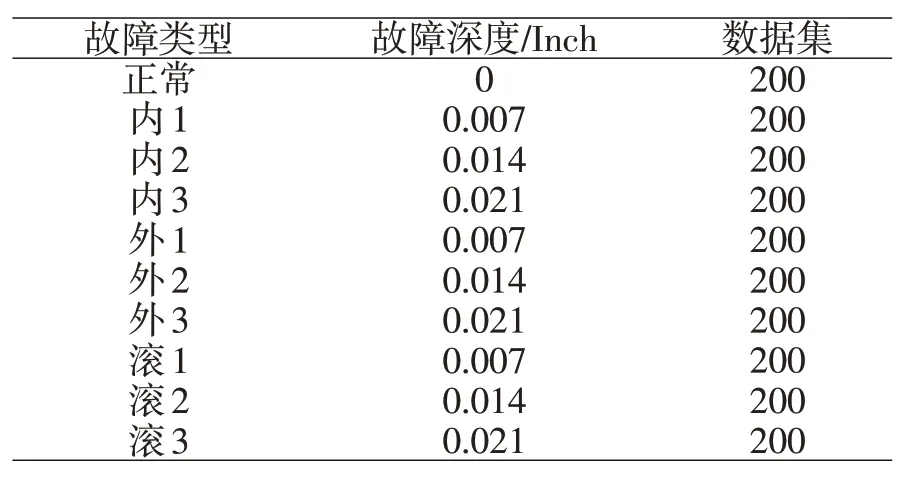
表1 故障数据集
本文设计DBN为5层网络,将节点数设定在2048-1200-600-300-10,动量参数取值0.8,学习率保持0.1。
3.2 结果分析
各类激活函数对于DBN反向传播的故障识别率与效率,结果见表2。根据表2结果可以发现,以新激活函数IM-Tahh构建的DBN网络相对其它激活函数建立的DBN网络可以在更短时间内完成数据计算,并且达到了最高的故障识别率,为99.8%。
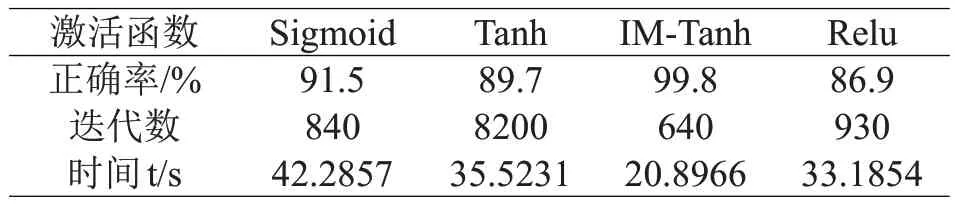
表2 不同激活函数下故障识别正确率
将新激活函数IM-Tahh的初始斜率参数设定在α0=0.01,位置参数为β∈[3,9],控制步长等于0.1,完成位置参数β更新后,获得图3中不同位置对应的障诊断准确率。
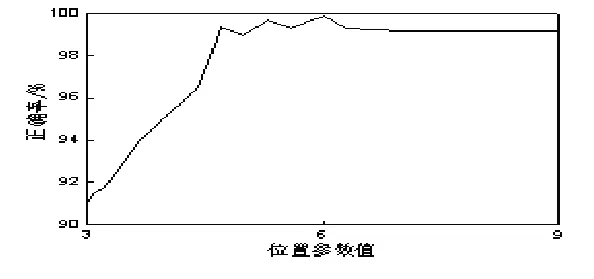
图3 故障识别正确率与位置参数关系
对图3进行分析可知,斜率0.01与位置β=6的条件下获得了最高故障识别准确率。因此设定最优位置β0=6。确定最优位置后,将斜率参数设置为α0∈[0.001,0.1],步长0.001,按照同样方法获得图4中不同斜率参数下的故障识别准确率曲线。
对迭代次数进行更新后,得到图4中的轴承故障识别准确率测试结果。
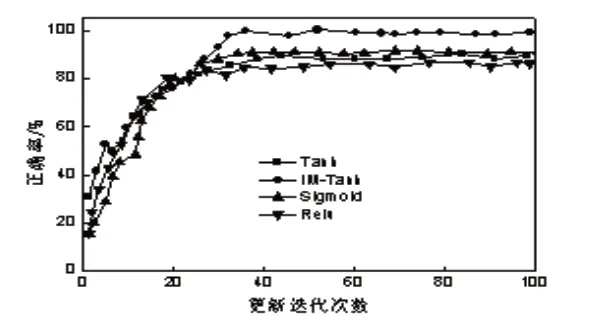
图4 不同激活函数下故障识别正确率随迭代变化
图4显示,新激活函数进行故障识别时相对其它类型激光函数达到了更优收敛性,其中,准确率最高的是IM-Tahh函数。
上述测试结果表明,采用新激活函数一方面能够克服DBN梯度消失的缺陷,并且缩短了数据处理时间,实现了故障识别准确率的明显提升,具备显著优势。
4 结论
本文在DBN基础上经过优化后再将其用于诊断传动主轴故障,以新激活函数IM-Tahh构建的DBN网络相对其它激活函数可以在更短时间内完成数据计算,达到99.8%的故障识别率。斜率0.01与位置β=6的条件下keyi获得了最高故障识别准确率。采用新激活函数一方面能够克服DBN梯度消失的缺陷,并且缩短了数据处理时间,实现了故障识别准确率的明显提升,具备显著优势。
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
成都信息工程大学学报(2022年3期)2022-07-21
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
物流技术与应用(2020年4期)2020-05-06
中国自行车(2018年8期)2018-09-26
制造技术与机床(2017年9期)2017-11-27
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年3期)2017-06-23
自动化学报(2017年7期)2017-04-18
现代电子技术(2016年15期)2016-12-01