CC-Li nk星型拓扑在环形线上的应用
2023-03-06 07:56吴志忠
机电信息 2023年3期
吴志忠
(广州市睿达科技工程有限公司,广东 广州 510623)
0 引言
在F工厂内原有的发动机搬运合装依靠大量人力和AGV搬送,使用劳动力比较多;同时AGV故障率较高,工人劳动强度较大,无法满足新车型快速迭代及生产节拍提升的需要[1-2]。为解决上述问题,需要采用新控制系统方案取代现有的控制系统,并满足发动机上料和发动机上装在同一循环圈内的硬性要求,重新设计新的控制系统。
1 CC-Link网络拓扑类型
CC-Link具有高速现场网络、较高的远程模块输入/输出响应性、自由的扩展性,现场网络通信速度最高可达10 Mb/s。远程网络模块具有较宽的扩展性,最高可达64个站点;远程模块输入/输出最多有8 192点;远程可写入寄存器数量为2 048个字;可读取寄存器数量为2 048个字。CC-Link网络能避免现场复杂的配线作业,提高配线质量,同时CC-Link具有开放性、高速性、抗干扰性、组态简单、容易施工等特点。其网络拓扑模式有两种:一种是直接串联拓扑,另外一种是星型连接拓扑。两种拓扑各有不同的特性,其中以直接串联型网络拓扑模式更为常见(图1)。
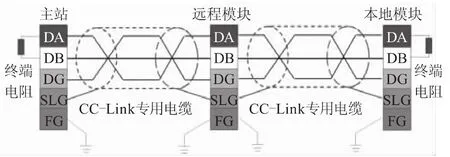
图1 CC-Link直接串联拓扑图
1.1 CC-Link直接串联网络拓扑特点
CC-Link直接串联网络拓扑结构,顾名思义就是一根专用的网络线把所有的远程模块、远程智能站等串联在网络线上,终端电阻连接在网络线的两端。现场施工方面,有着如下特点:
(1)可以从任意站点号连接CC-Link电缆。
(2)终端电阻直接连接到网络两个末端模块的DA、DB线上。
(3)使用的CC-Link电缆不同,终端电阻也不同。使用CC-Link专用电缆,终端电阻是110 Ω、1/2 W;使用CC-Link专用高性能电缆,终端电阻是130 Ω、1/2 W。
(4)主站可以在两端之外的任意点上连接。
(5)不允许星型连接。
(6)通信速度可以是10 Mb/s、5 Mb/s、2.5 Mb/s、625 kb/s、156 kb/s。
(7)两个站点之间距离需要大于20 cm。当通信速度最大为10 Mb/s时,CC-Link的通信距离为100 m;当通信速度最小为156 kb/s时,通信距离可达1 200 m。
1.2 CC-Link星型网络拓扑特点
星型网络拓扑并非采用直线串联型连接,而是用与直线串联型连接不一样的T型连接,其网络通信速度和网络通信距离是有限制的[3],在实际应用中很少见,终端电阻是连接在主干线的两端(图2)。
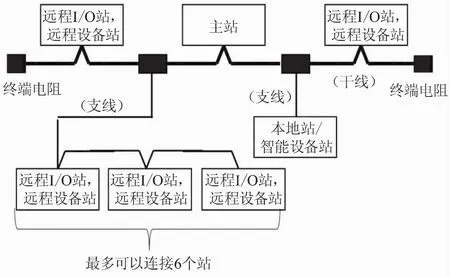
图2 CC-Link星型连接网络拓扑图
CC-Link星型连接有以下特点:
(1)通信速度只能是625 kb/s、156 kb/s。
(2)主干线通信距离有两种可用:625 kb/s为50 m,156 kb/s为200 m。
(3)每条支线最大长度为8 m,支线最大站点数为6个。
(4)可以使用CC-Link专用电缆,但不可以使用CC-Link专用高性能电缆。
(5)终端电阻只能是110 Ω,且连接方式如图3所示。
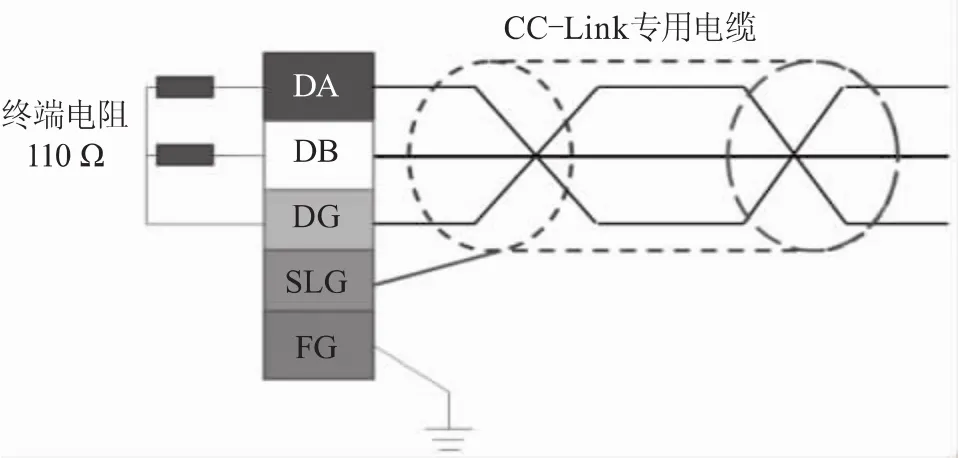
图3 CC-Link星型拓扑终端电阻连接方式
2 发动机合装CC-Link网络控制技术总体方案简介
本案例正是运用上述CC-Link星型网络拓扑特点设计的一个新环形系统。方案要求在一个固定位置上进行发动机部件上料,在另外一个随行位置上进行发动机合装(把发动机安装到车体内部)。在发动机合装点要求每个自行小车一边跟随主线速度前进,一边上升到车体内部进行安装,以实现发动机自动上装的目的(图4)。
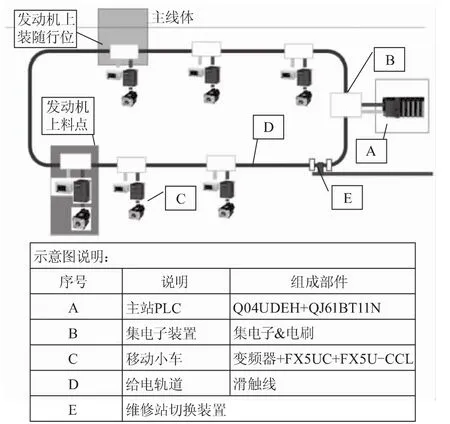
图4 本方案采用控制技术总体方案示意图
2.1 主要控制部件选择方案
(1)本次总线体长度不超过50 m,可以采用CC-Link星型连接最高速625 kb/s进行网络组态;每个支线(即自行小车的总高度)长度不超过3 m,每个支线(每台自行小车需要网络模块)远程网络模块站点数不超过5个;满足CC-Link星型网络基本设计要求。
(2)PLC模块选择:采用模块组件思路。主站采用Q04UDEH+QJ61BT11N CC-Link主站。每台自行小车因所需控制的信号比较多,采用一个FX5UC+FX5-CCLM+输入/输出模块,FX5U-CCL-MS做从站与主站QJ61BT11N连接。自行小车支线网络通过集电子与滑触线(作为CC-Link主干线)连接到CC-Link主站。
(3)自行小车动力提供方式:环形线轨道上分布着一排滑触线,上面主要是AC380 V动力电滑触线,下方主要是CC-Link网络通信及其他信号等低压滑触线[4]。自行小车直接从滑触线上取得AC380 V提供给自身作为动力电,并转化为DC24 V提供给小车控制使用。下方的CC-Link滑触线作为整个网络主干线连接到各个自行小车的FX5U-CCL-MS模块上。
2.2 总体网络结构
由于终端电阻只能接在整个网络的两端(图5),所以本方案设计其中一个终端电阻连接在地面的主站上,另外一个终端电阻连接到图4中的E处。其他变频马达等根据机械设计参数进行选型。
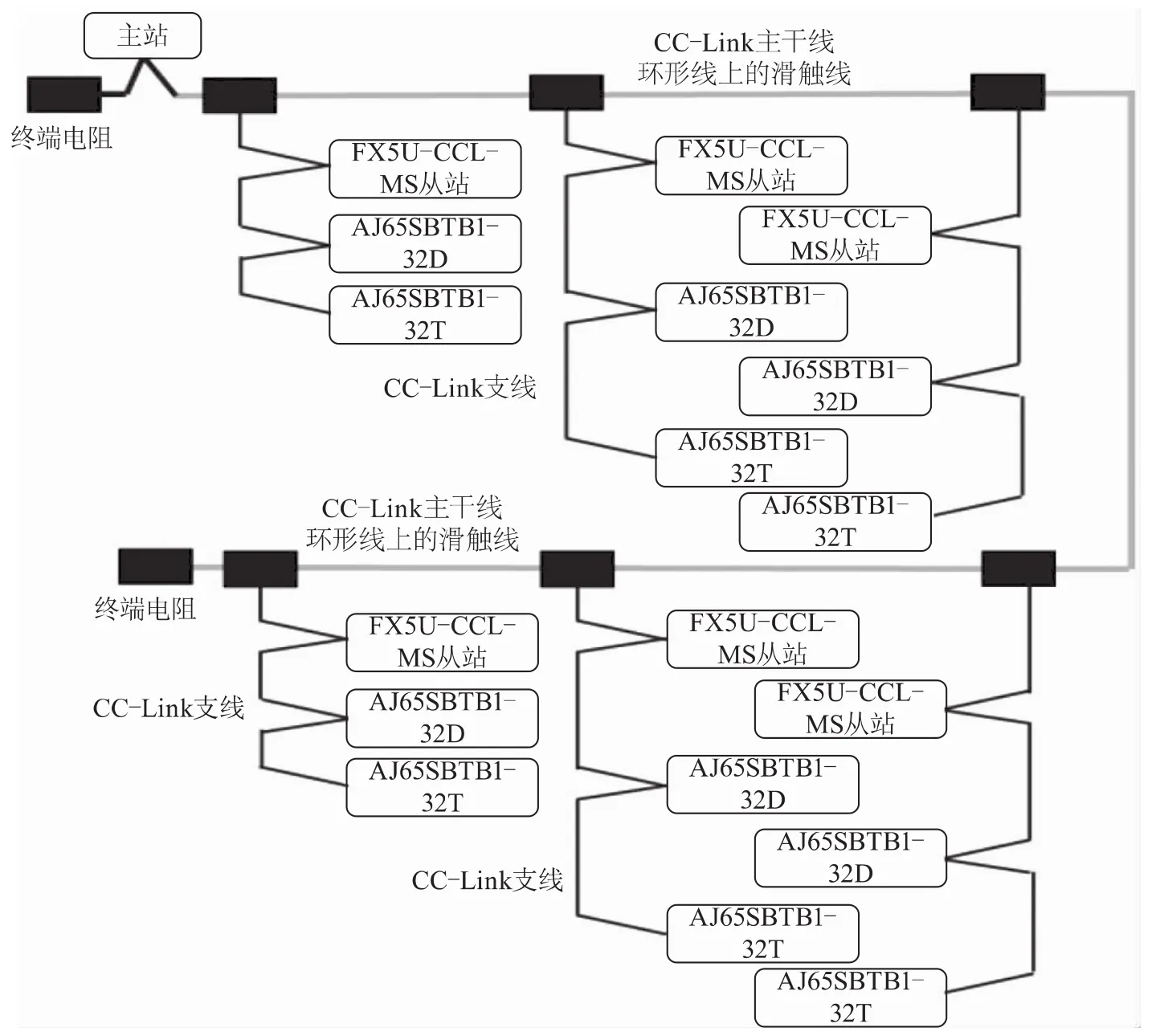
图5 本项目CC-Link网络拓扑图
3 应用效果
最后案例结果如图6所示,从使用效果来看基本满足设计需求,在F工厂基本实现了发动机从上料到合装工序之间的自动化过程。
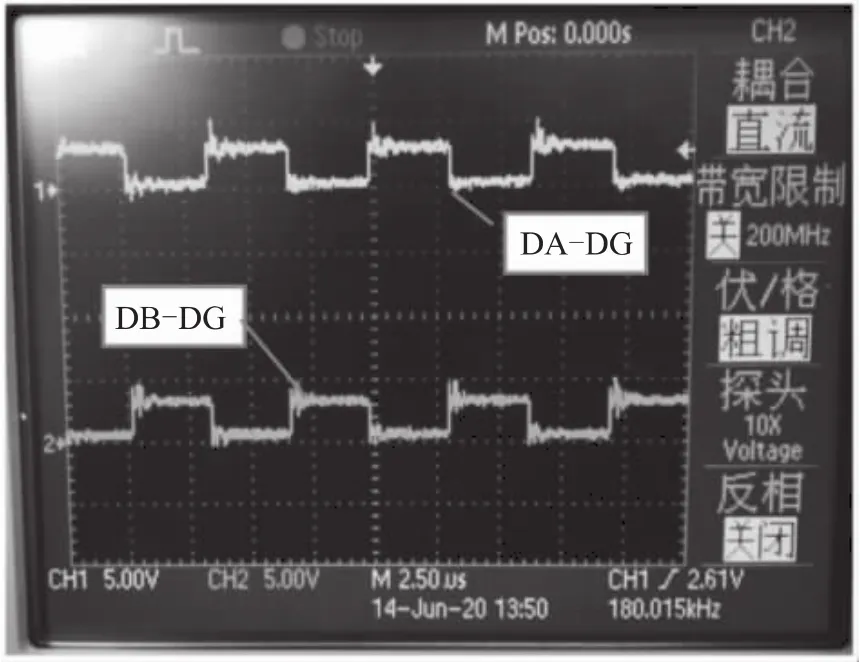
图6 附近变频马达未启动时示波器DA-DG、DB-DG波形
但实际运行中还存在一些问题,其中一个就是CC-Link网络在滑触线上没有受到屏蔽保护。考虑到网络会受到其他强电信号的干扰,后续对网络进行了测试,测试项目如下:
(1)在CC-Link星型网络的测试中,通过SB16对各个从站连接状况进行监控,发现CC-Link总线随着马达运行总会受到一些干扰,由于干扰时间很短,从而没有触发从站掉线的报警。
(2)使用示波器对CC-Link总线进行监控,发现CC-Link通信的波形会随着变频马达的运转而变化,证明波形会因此受到一些干扰。
4 结语
本案例采用CC-Link星型网络拓扑结构解决了发动机从搬运到上装的自动化问题,减少了人为参与,提高了生产效率,对后期生产产能的提高做了预备性的扩充。
实践证明了CC-Link星型网络拓扑结构在环形线上应用的可行性,但由于CC-Link在滑触线上没有很好的屏蔽保护,在强磁场的地方(如汽车焊装车间等)可能会存在应用上的受限。目前,相关文献对星型网络组态研究比较少,而关于星型网络结构在环形线体应用的相关文献则更少,因此本文在这方面具有较高的参考应用价值。
猜你喜欢
中国特种设备安全(2022年7期)2022-10-09
网络安全与数据管理(2022年2期)2022-05-23
劳动保护(2021年5期)2021-05-19
小资CHIC!ELEGANCE(2019年21期)2019-07-02
新世纪智能(英语备考)(2018年11期)2018-12-29
电子制作(2018年23期)2018-12-26
汽车维修技师(2017年7期)2017-12-05
汽车维修技师(2017年10期)2017-03-17
中国环境监察(2016年7期)2016-10-23
中国现当代社会文化访谈录(2016年0期)2016-09-26