基于点线特征的建筑物点云配准方法
2023-03-05 05:04尹盘飞
现代测绘 2023年6期
尹盘飞,刘 霞,魏 军
(三和数码测绘地理信息技术有限公司,甘肃 天水 741000)
0 引 言
随着三维扫描技术的快速发展,三维重建技术也得到了广泛的应用,主要在历史珍贵文物数字化保护领域[1]、医学领域[2]、自动驾驶或无人机飞行领域[3]等,三维重建技术为人类的生活提供了极大的便利,推动了各个行业的快速发展。由于三维扫描仪的视角有限,每次仅能扫描到物体的部分点云,需要将获取的多个视角的点云通过旋转、平移的步骤,将各站点云配准到同一个基准坐标系下,从而获得完整的信息,因此配准的质量和效率对三维重建具有重要意义,是三维重建过程中的关键步骤。
点云配准一般包括粗配准和精配准两个过程[4],粗配准主要是将未知位置姿态的基准站点云和待配准站点云转移拼接到基准站点云所在的坐标系下,一定程度上减小基准站点云和待配准站点云在空间位置上的旋转与平移错位,为精配准提供良好的参数初值。粗配准常用的方法主要有4PCS算法、快速点特征直方图、基于统计概率学的正态分布变换(NDT)算法等。精配准是在粗配准的基础上通过多次迭代优化将基准站点云和待配准站点云进行精确的配准,获取更加精确的配准参数值,提高点云数据配准的精度,使两片点云实现完好的拼接。其中被广泛应用的是由Besl和Mkcya提出的最近点迭代算法(Iterative Closest Point, ICP),该方法对初值精度要求较高,在迭代过程中容易陷入局部最优解。点云配准在配准过程中根据选择的配准基元不同,将配准方法分为基于点特征基元、线特征基元、面特征基元,由于点特征基元在目标点云中大量存在,因此使用较为广泛,当建筑物部分点云被遮挡时,在基准站点云和待配准站点云中无法提取到精确的同名特征点,所以在点特征进行配准时,点云的配准质量会受到一定程度的影响。然而同名线特征和同名面特征受获取的点云质量影响较小,可以有效的减小点云配准误差。
针对上述问题,本文提出利用提取的点特征,通过对偶四元数构建粗配准模型,解算配准参数,为精配准提供初值;然后从建筑物中提取线特征,并将共线方程作为精配准的数学模型,通过平差迭代解算精确配准参数。本文方法在粗配准过程中可以同时解算出旋转矩阵和平移参数,有效降低了平移矩阵和旋转矩阵之间的耦合误差,提高了点云的粗配准精度;在精配准过程中使用同名线特征,避免了选取精确的同名点,而且相对于仅使用单一特征,使用点线特征相结合可以获取更好的点云配准精度。
1 点云基本理论
1.1 点云配准基本理论
不同测站点云配准的实质是将点云转换到同一个坐标系下,获取不同测站之间的转换关系,从而获取一个完整的物体。传统的点云转换模型为:
(1)
式中,X1、Y1、Z1为基准站坐标系下的点云坐标,X2、Y2、Z2为待配准站点云的坐标,R为旋转矩阵,T为平移矩阵。
使用提取的点特征利用公式(1)实现不同测站点云拼接时,需要从不同测站点云中分别提取3个特征点。在求解点云配准参数时,为了同时解算出配准参数,减小分别解算配准参数的误差,使用对偶四元数解算配准参数旋转矩阵R以及平移矩阵T。
1.2 对偶四元数
对偶四元数是由Clifford提出的一种数学运算工具,由对偶数和四元数两部分组成,可以同时表示刚体的旋转和平移运动,对偶四元数的表达形式如式(2)所示:
(2)

由于对偶四元数的实部和对偶部都属于四元数的对偶数,因此对偶数和四元数的运算法则也适用于对偶四元数。同时,对偶四元数的几何意义可以表示为2个三维集围绕着一个轴做刚体运动,先沿着n方向做平移运动,然后平移距离为d,平移到p点,然后在p点沿着n的方向旋转θ角度,如图1所示。

图1 对偶四元数描述的刚体运动

(3)
式中,S为反对称矩阵。
根据式(2)可得,三维点集刚体运动的旋转矩阵和平移矩阵可以用对偶四元数表示,如式(4)所示。
(4)
通过计算,三维点云的配准参数旋转矩阵和平移矩阵可以用对偶四元数表示,如式(5)所示。
(5)
式中,a1、a2、a3、b1、b2、b3、c1、c2、c3为旋转角φ、ω、κ构成的方向余弦;(ΔX,ΔY,ΔZ)为平移向量。
通过式(2)~(3)可以得到对偶四元数描述的基于点特征的建筑物点云配准数学模型,如式(6)所示。
(6)

将式(6)进行线性化,并从基准站点云和待配准站点云中提取3对同名特征点,得到的误差方程如式(7)所示。
V=AX+L
(7)


X=[dk0dk1dk2dk3dr0dr1dr2dr3]T,
通过平差解算出参数k0、k1、k2、k3、r0、r1、r2、r3,并将求解的参数值代入式(4),即可求出点云粗配准参数:旋转矩阵R和平移矩阵T。
1.3 基于线特征的点云配准数学模型
从基准站点云和待配准站点云分别提取同名直线,但是提取的同名直线中对应的端点不一定是同名特征点。
因此本文选用共线方程作为基础方程来描述同名直线间的三维相似变换,并将此作为约束条件,如式(8)所示。
(8)
式中,XT、YT、ZT为待配准站点云到基准站点云平移参数,R为待配准站点云到基准站点云的旋转矩阵,S、λ1、λ2为待配准站点云到基准站点云的缩放因子。
每一对同名直线都可以列出两个方程,如式(8)所示,将式(8)的两个公式相减,并获得到点云配准的数学模型,如式(9)所示,并利用四元数方法解算配准参数。
(9)
2 实验分析
为了验证本文方法的有效性,采用WHU-TLS基准数据集中一座建筑物点云数据,选取的建筑物的两站点云数据如图2所示,点云信息如表1所示。

表1 实验数据基本信息
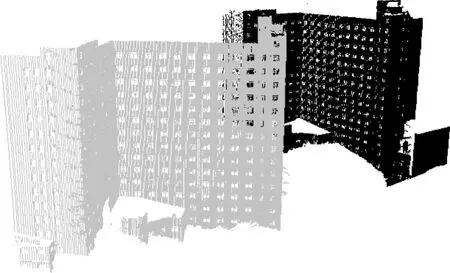
图2 配准前两测站点云的基本位置
在图2中,灰色的点云是基准站点云,黑色的点云是待配准站点云。由图2可知,在配准前两测站点云数据在空间位置上存在较大的差异。
本文首先对两站点云进行了点云噪声处理,为了证明本文方法基于点线特征的建筑物点云配准效果,先从处理后的点云中均匀选取4对同名点进行点云粗配准,然后再在粗配准的基础上从点云中选取3对同名线特征进行精配准。4对同名点的坐标信息如表2所示。
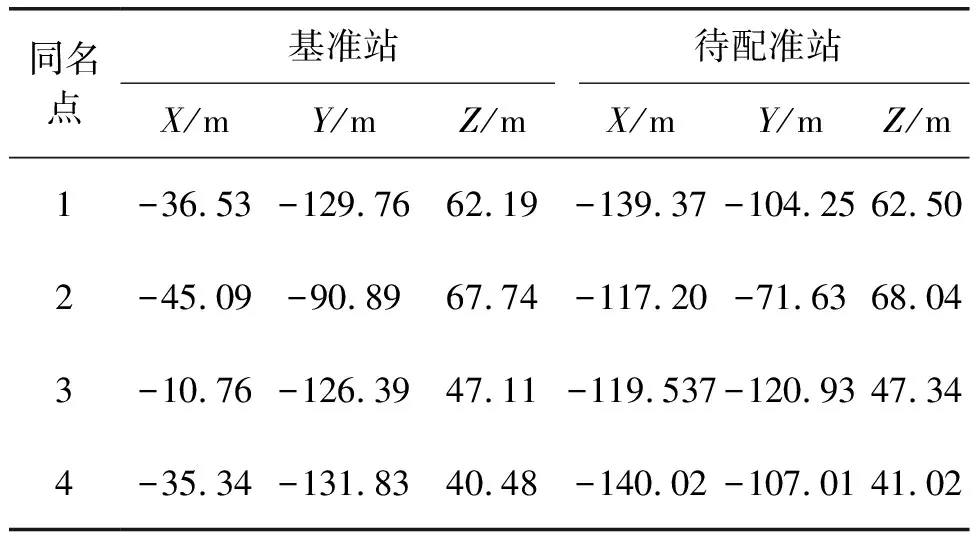
表2 两站中提取的同名特征点坐标
使用提取的4对同名特征点通过对偶四元数将待配准测站点云配准到基准站点云所在的坐标系下,获取的粗配准效果如图3所示。由图3可知,经过粗配准后,很大程度上减小了待配准站点云与基准站点云在空间位置上的误差,使两站点云拼接到了一起,但可以发现,两站点云在有些地方融合得不是很好,仍然存在误差。
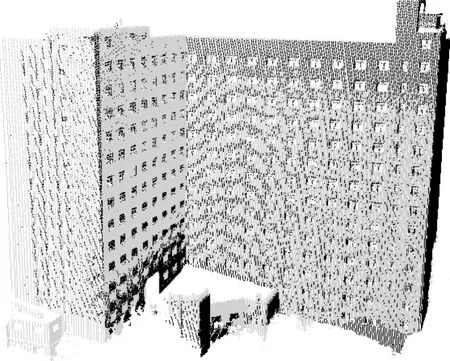
图3 粗配准效果图
在粗配准之后,将粗配准获取的配准参数值作为精配准的初始参数值。然后利用从两侧站中提取的4对同名线特征,基于共线条件方程实现了待配准测站和基准站的精配准,获取的配准参数如表3所示,精配准效果如图4所示。

表3 获取的配准参数值
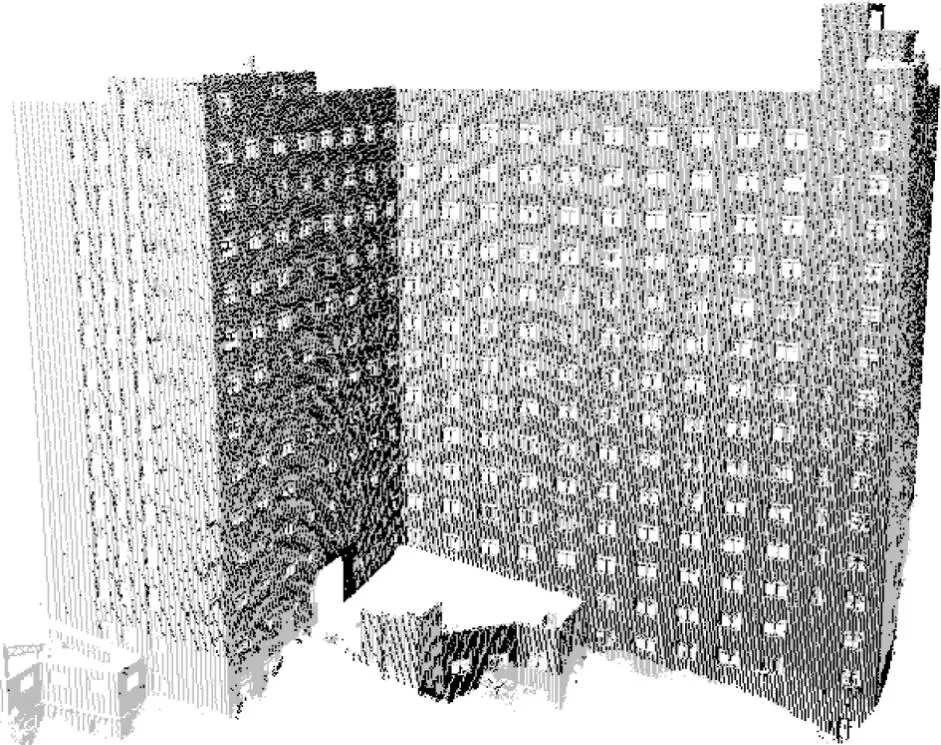
图4 精配准效果图
由图4可知,待配准点云和基准站点云很好的融合在了一起,边界处也较为贴切,证明了本文方法的有效性。
为了进一步分析基于点、基于点线的点云配准精度,本文分别选用点特征和点线特征进行建筑的点云配准,选用同名特征配准后的平均距离(距离为配准后的待配准站点云坐标与基准站点云坐标之差)中误差作为精度的评价指标。两种方法的配准精度如表4所示。

表4 两种配准方法获取的同名特征配准中误差
由表4可知,采用点线特征相结合的建筑点云配准方法获取的同名特征点云的中误差比仅使用点特征的配准方法的精度高,证明了本文方法的可行性与有效性。
3 结 语
在建筑物的点云数据中,存在大量的几何特征,本文针对建筑存在的这一特性,提出基于点线特征结合的建筑物点云配准方法,该方法将选取不同的特征进行了建筑物不同测站的粗配准和精配准。实验结果表明,该方法获取的配准后同名特征的距离中误差为2.1×10-3m,使用多种特征相结合的配准方法比仅使用一种特征进行配准获取更好的配准精度,一定程度上也可以提高点云配准的质量。本文此次仅选用了建筑物中的点线特征,在后续研究中,可以加入面特征,从而进一步提高建筑物点云配准的精度。
猜你喜欢
西江月(2021年3期)2021-12-21
连环画报(2016年10期)2016-12-16
公民与法治(2016年19期)2016-05-17
应用数学与计算数学学报(2015年1期)2015-07-20
中国光学(2015年1期)2015-06-06
读者·校园版(2015年7期)2015-05-14
发明与创新(2015年30期)2015-02-27
数学年刊A辑(中文版)(2014年4期)2014-10-30
数学年刊A辑(中文版)(2014年6期)2014-10-30
河南科技(2014年15期)2014-02-27