
GNSS接收机射频芯片中LDO的设计
2023-03-01 00:46苟锦航黄海生李鑫叶小艳
导航定位学报 2023年1期
苟锦航,黄海生,李鑫,叶小艳
GNSS接收机射频芯片中LDO的设计
苟锦航,黄海生,李鑫,叶小艳
(西安邮电大学 电子工程学院,西安 710121)
为了降低全球卫星导航系统(GNSS)接收机中射频前端芯片电源噪声对本振信号频率干扰的影响,提出一种快速瞬态响应、高稳定性全片内低压差线性稳压器(LDO):通过动态偏置缓冲器的阻抗衰减技术以及米勒补偿技术,对LDO进行动态的主极点跟踪;在整个负载电流范围内,次极点推离单位增益带宽外,保证系统的稳定性;同时动态偏置缓冲器随负载电流变化为功率管栅极充放电,以实现LDO的快速瞬态响应。该电路用于GNSS接收机中频率综合器(FS),基于中国台湾积体电路制造公司的互补金属氧化物半导体(CMOS)工艺完成电路设计,电路输出电压为2.5 V,最大负载电流为3×10-1A。仿真结果表明:该LDO在输出电容为0到2×10-10F的范围内均能稳定,最小相位裕度为60.2°;当负载电流以3×10-1A/5×10-7s跳变时,输出电压下冲6.5×10-2V、上冲8.3×10-2V,平均响应时间5.3×10-7s;线性调整率为5×10-5V,负载调整率为9×10-6V,电源抑制比在1×103Hz下为-77.8 dB。
全球卫星导航系统(GNSS);低压差线性稳压器(LDO);米勒补偿;极点追踪;快速瞬态响应;无片外电容
0 引言
全球卫星导航系统(global navigation satellite system,GNSS)射频前端芯片包括滤波器、低噪声放大器、频率综合器、混频器、可变增益放大器和数模转换器等模块[1-2]。射频信号经前置滤波放大后,与频率综合器产生的正弦波本振信号混频而下变频为中频信号,经过增益放大器后数模转换器将中频信号转变为离散时间的数字中频信号输送给基带电路[3]。其中频率综合器中的压控振荡器(voltage controlled oscillator,VCO)对电源噪声极其敏感,电源噪声将在混频过程中被下变频,严重影响VCO的相位噪声;而低压差线性稳压器(low dropout regulator,LDO)作为单独的电源系统为频率综合器供电,可有效提升VCO的性能[4],因此一个与电源噪声无关的本振信号决定着GNSS接收机系统的准确性和稳定性。
高性能的LDO由于其具有低噪声、高精度、高稳定性、结构简单且易于集成等特点,被广泛应用于射频芯片或无线射频系统中,为内部各电路模块提供稳定而不受负载影响的电源管理系统。传统的LDO通过选择合适的片外电容等效串联电阻值(equivalent series resistance,ESR)来确保多极点系统的稳定性,为了实现片上系统的集成,无片外电容LDO成为了当前的主流研究方向,其环路稳定性和负载瞬态性能被认为是设计的首要指标[5]。文献[6]采用了经典的嵌套式米勒补偿(nested Miller compensation,NMC)技术保证了2×10-1A系统静态时的稳定性;但当负载突变时,其过冲电压与响应时间较大。文献[7]在NMC技术的基础上,通过大电容环路和摆率增强电路,保证系统稳定性并改善LDO的瞬态响应;但其功耗和电路复杂度较高,不适合低功耗系统的应用。
针对无片外电容LDO的环路稳定性以及瞬态响应差的问题,本文基于米勒补偿[8]技术提出具有阻抗衰减的缓冲级,通过零极点追踪保证单位增益带宽内只有主极点,同时动态偏置缓冲级额外的环路响应功率管栅极,从而得到一款全片内快速瞬态响应、大带宽、高稳定性的LDO。
1 LDO电路设计
本文设计的低压差线性稳压器由4部分组成,即误差放大器(error amplifier,EA)、缓冲级(buffer)、P型金属氧化物半导体(p-channel metal-oxide semiconductor, PMOS)功率晶体管以及反馈网络,米勒电容跨接在误差放大器输出端和LDO输出端形成米勒频率补偿。LDO属于电压串联负反馈电路,电路结构如图1所示。图中:IN为LDO输入电压;OUT为LDO输出电压;FB为LDO反馈电压;BG为带隙基准电压;M为功率管;1和2为反馈网络;buffer为缓冲级等效输出阻抗;par为功率管栅端的寄生电容;C为米勒电容;C为LDO等效输出电容;ESR为输出电容的寄生电阻;R为输出端负载;0、1和2为LDO的3个极点。通过反馈电压FB与基准电压BG经过误差放大器比较后调整功率管栅端电压,从而稳定输出电压OUT。
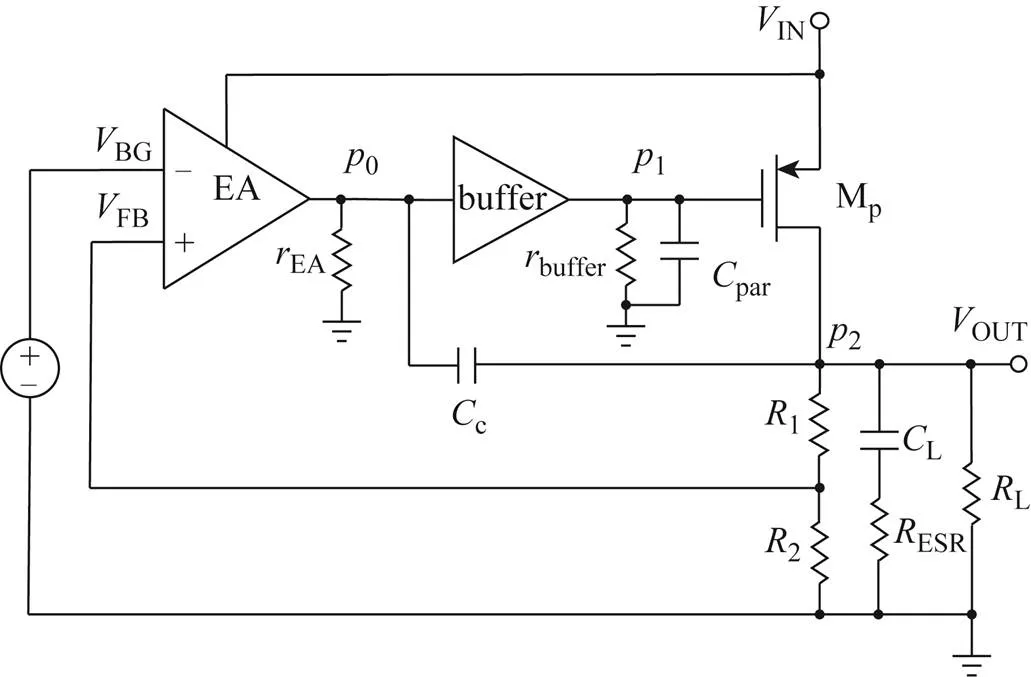
图1 本文设计的LDO结构
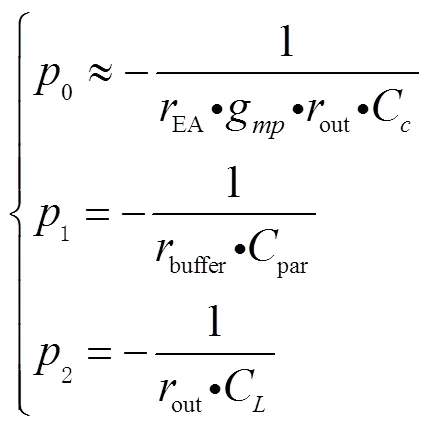
与传统二级LDO相比,在误差放大器和功率管之间插入缓冲级,使主极点分裂为2个极点0和1;由于米勒效应以及缓冲级的阻抗衰减特性使得全负载电流范围内,主极点移动至更低频处,次极点移动至更高频率处,从而实现了带宽的扩展。LDO的极点为

1.1 LDO核心电路
LDO的核心电路如图2所示。图中:0~10为图1中的误差放大器EA,采用PMOS差分输入双端转单端折叠式运算放大器,可有效减少闪烁噪声对LDO输出噪声的影响;11~19为图1中的缓冲级buffer,采用动态偏置的超级源跟随器,利用其阻抗衰减特性降低其输出阻抗buffer;图1中的反馈网络1和2采用二极管连接的晶体管M1与M2,这样可以有效节省芯片面积,实现片上集成;C跨接在折叠式运放与稳压器输出端,构成米勒频率补偿;和1~3为电路提供偏置电压。
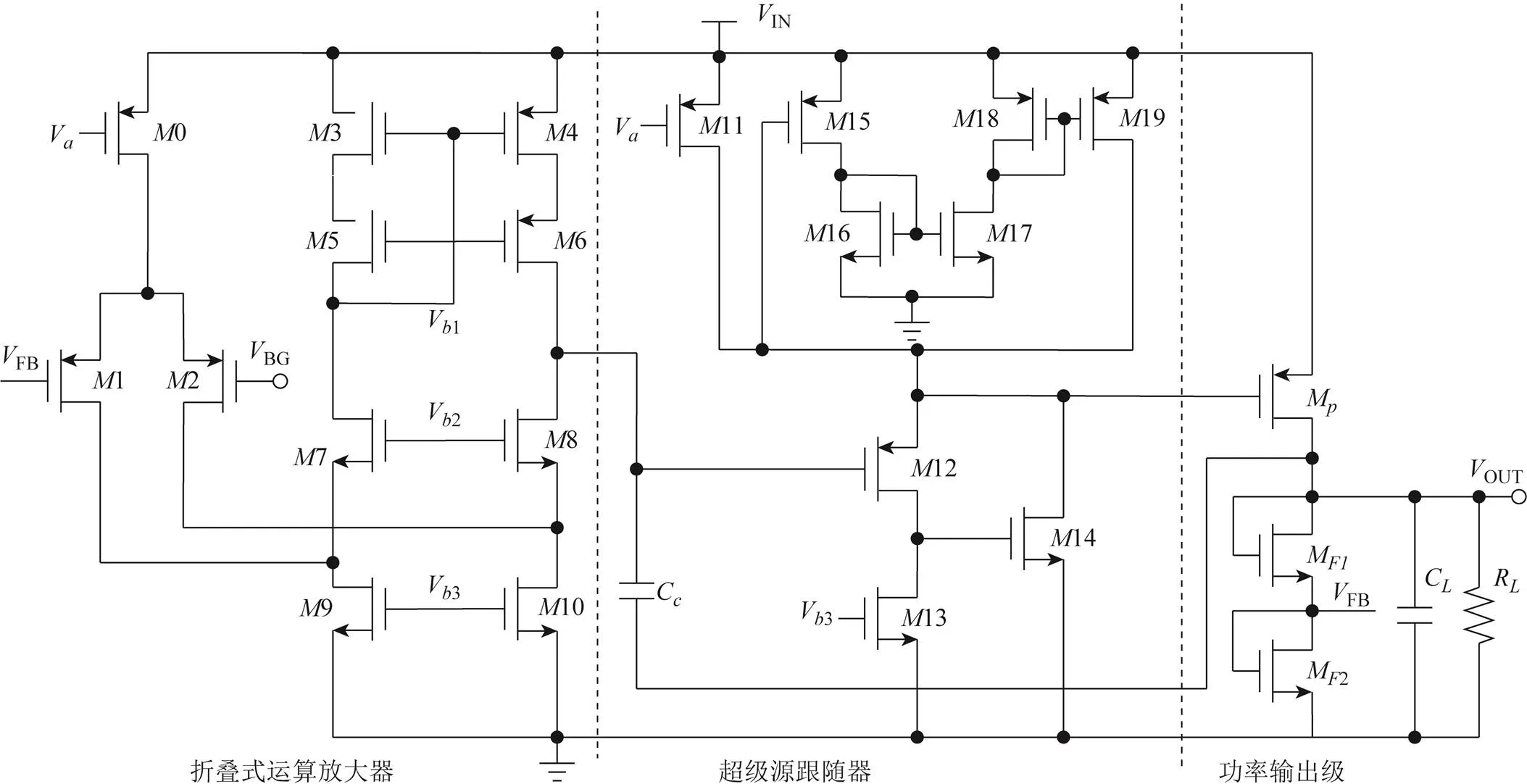
图2 LDO核心电路
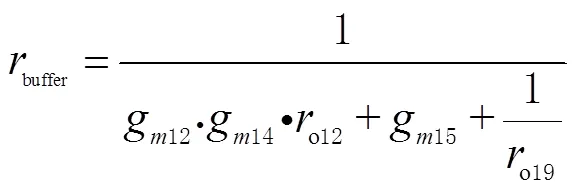
传统的源跟随器构成的缓冲器,其输出阻抗为1/,其中为单个晶体管的跨导;而采用阻抗衰减的缓冲级,14和15与跟随器12输出并联构成负反馈结构,可减少源跟随器的等效输出阻抗。缓冲器阻抗为
1.2 LDO环路稳定性分析
由误差放大器、缓冲器以及共源放大器功率输出级构成的三级结构LDO,必然要考虑其稳定性问题。本文采用经典米勒补偿,通过具有阻抗衰减的缓冲器,动态追踪主极点频率对LDO系统进行零极点补偿。图3为LDO小信号模型,图中:第一级中的1为误差放大器输入管1跨导;第二级中的12为缓冲器等效跨导;ob为缓冲器等效输出阻抗;第三级中为功率管M跨导;out为LDO等效输出阻抗。
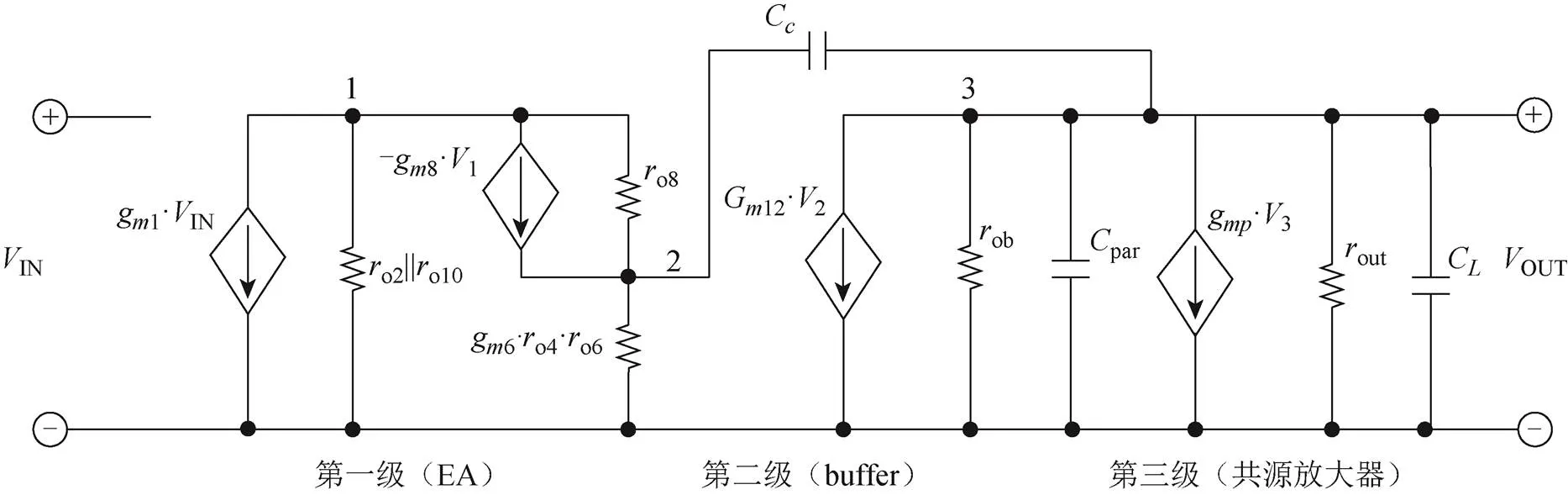
图3 LDO小信号等效电路
通过小信号等效模型可知共有3个节点,通过节点电流法可列出节点方程为
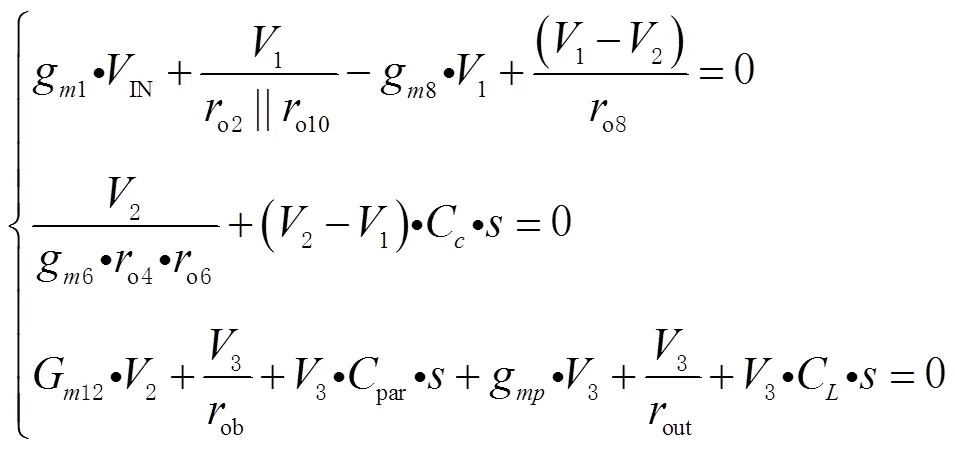
式中:1为节点1的电压,1=IN;2为节点2的电压;3为节点3的电压,3=OUT;为复频域中的频率量;6为6跨导;8为8跨导;o2为2阻抗;o4为4阻抗;o6为6阻抗;o8为8阻抗;o10为10阻抗。
解得LDO主体电路的传递函数为
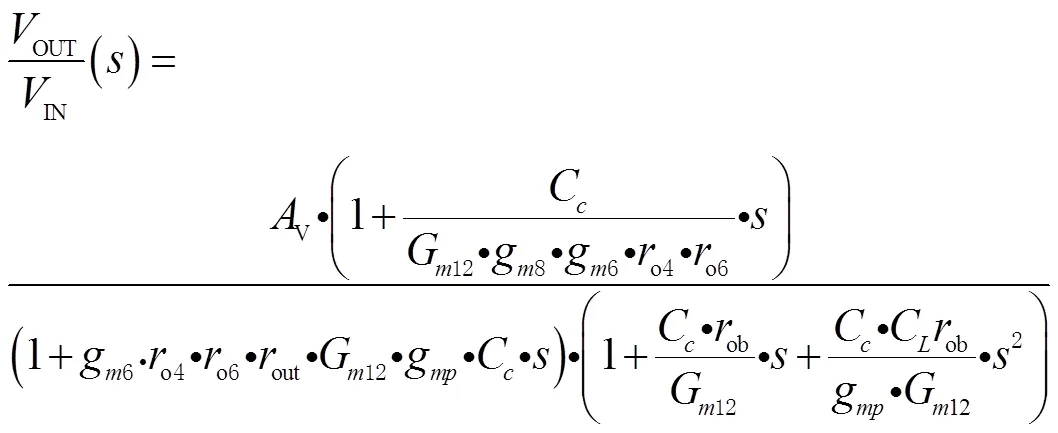
式中v为LDO的低频直流电压增益。
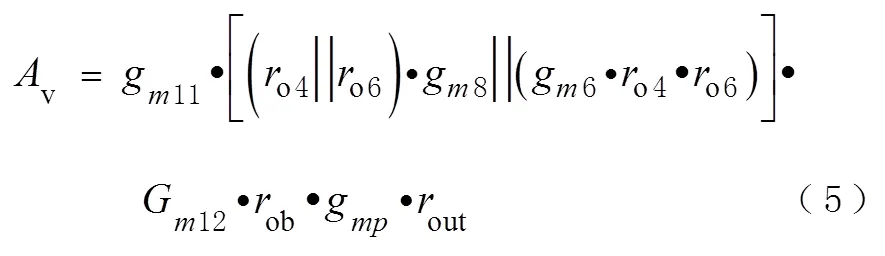
由式(3)可得LDO的低频直流电压增益为
第二级缓冲级的等效输出跨导为

LDO环路的低频主极点、高频次极点、零点和单位增益带宽分别为
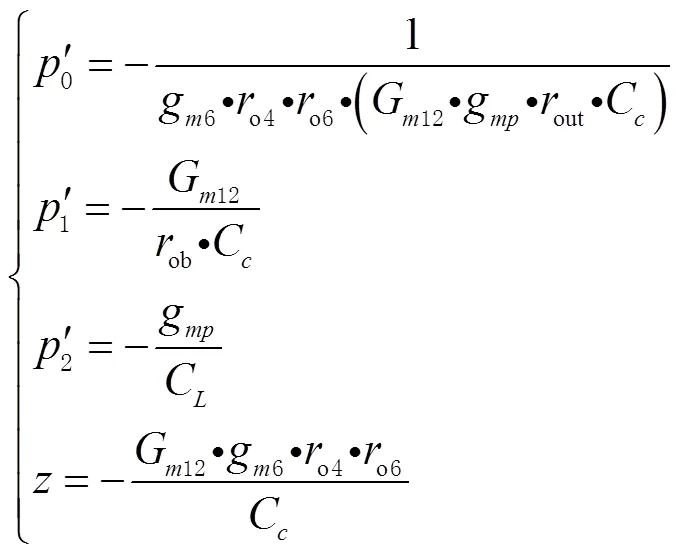
当LDO轻载时,负载电流小,功率管跨导减小。根据上面分析可知,缓冲级等效阻抗buffer增大,跨导12减小。根据式(7)可知,LDO主极点0`频率增大,次极点频率1`减少,次极点频率2`减少, 2个极点靠近导致单位增益带宽内出现多个极点,通过设置合适的米勒电容C,使零点对次极点1`进行补偿,将次极点2`频率设置在大于BW单位增益带宽外,即2`≥BW,从而保证单位增益带宽内只有1个主极点。同理,当LDO重载时,负载电流增大,增大,buffer衰减,12增大。根据式(7)可知,LDO主极点0`频率减小,次极点频率1`增大,零点频率增大,次极点与零点动态追踪主极分裂,保证单位增益带宽内只有1个主极点。由此可得LDO输出负载C的范围为
图4为LDO零极点追踪位置分布,图中RE为复平面实轴;IM为复平面虚轴;o为复平面原点。由图可看出上述零极点补偿使得单位增益带宽内LDO为单极点系统。
因此,本文提出的基于米勒效应的零极点追踪频率补偿技术在不同的输出电容C下LDO均能保持稳定。当LDO驱动容性负载时,若LDO处于轻载状态时,负载电流较小导致过小,此时2`≤BW,系统单位增益带宽内出现多个极点导致系统振荡。因此为保证LDO不产生振荡,当LDO驱动容性负载时,应取最小负载电流为1 mA。
1.3 瞬态响应分析
传统的LDO在输出端具有数量级为微法级的片外电容,以达到稳定系统的目的。摆脱大片外电容的LDO虽然节省了芯片面积,提高了集成度,但是电源抑制和负载响应能力会降低。当负载阶跃突变时,输出端电容无法提供或吸收瞬时电流,LDO将在响应时间内在输出端产生一个电压跳变[9]。当LDO由重载跳变为轻载时产生过冲电压为
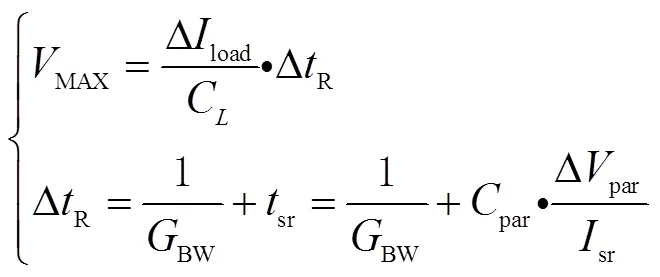
式中:MAX为过冲电压;R为LDO环路响应时间;load为负载电流;sr为误差放大器的压摆率时间;sr为误差放大器的充放电电流;par为功率管栅端充放电电压。由式(10)可知,在无片外电容的情况下只能通过减小LDO的环路响应时间来抑制输出电压的跳变[10],这就要求LDO具有大的环路带宽BW和大的充放电电流sr[11]。
本文提出带动态偏置电流的超级源跟随器,在扩展LDO带宽BW的同时可提高功率管栅端的摆率电流sr。当LDO由轻载向重载跳变时,LDO输出电压下降,由反馈电压经误差放大器后输出电压降低,缓冲器输入电压降低,以及动态偏置单元15~19镜像负载电流导致11管漏电流增大[12],M14管栅压升高后导通在M栅极形成放电电流,M栅极电压能够更快地减小,从而提高LDO的瞬态响应能力。同理,当LDO由重载向轻载跳变时,LDO输出电压上升,由反馈电压经误差放大器后输出电压升高,缓冲器输入电压升高,将14管关断,同时恒流源11向功率管栅端充电,形成充电电流,将功率管栅端电压升高,从而快速降低LDO输出电压,快速形成负反馈机制。
2 LDO电路仿真
采用中国台湾积体电路制造股份有限公司(Chinese Taiwan Semiconductor Manufacturing Company Limited,TSMC)1.8×10-5m互补金属氧化物半导体(complementary metal-oxide-semiconductor,CMOS)工艺,在楷登(Cadence)环境下的斯佩克特雷(Spectre)仿真工具进行电路仿真。图5和图6为电源输入电压为3.3 V、输出电压为2.5 V时,LDO在1×10-4A和3×10-1A负载电流下的频率响应曲线。仿真结果表明,LDO的单位增益带宽约为1.936×10-7Hz,最小相位裕度为60.2°。由此可知在全负载范围内,LDO系统具有很好的稳定性。
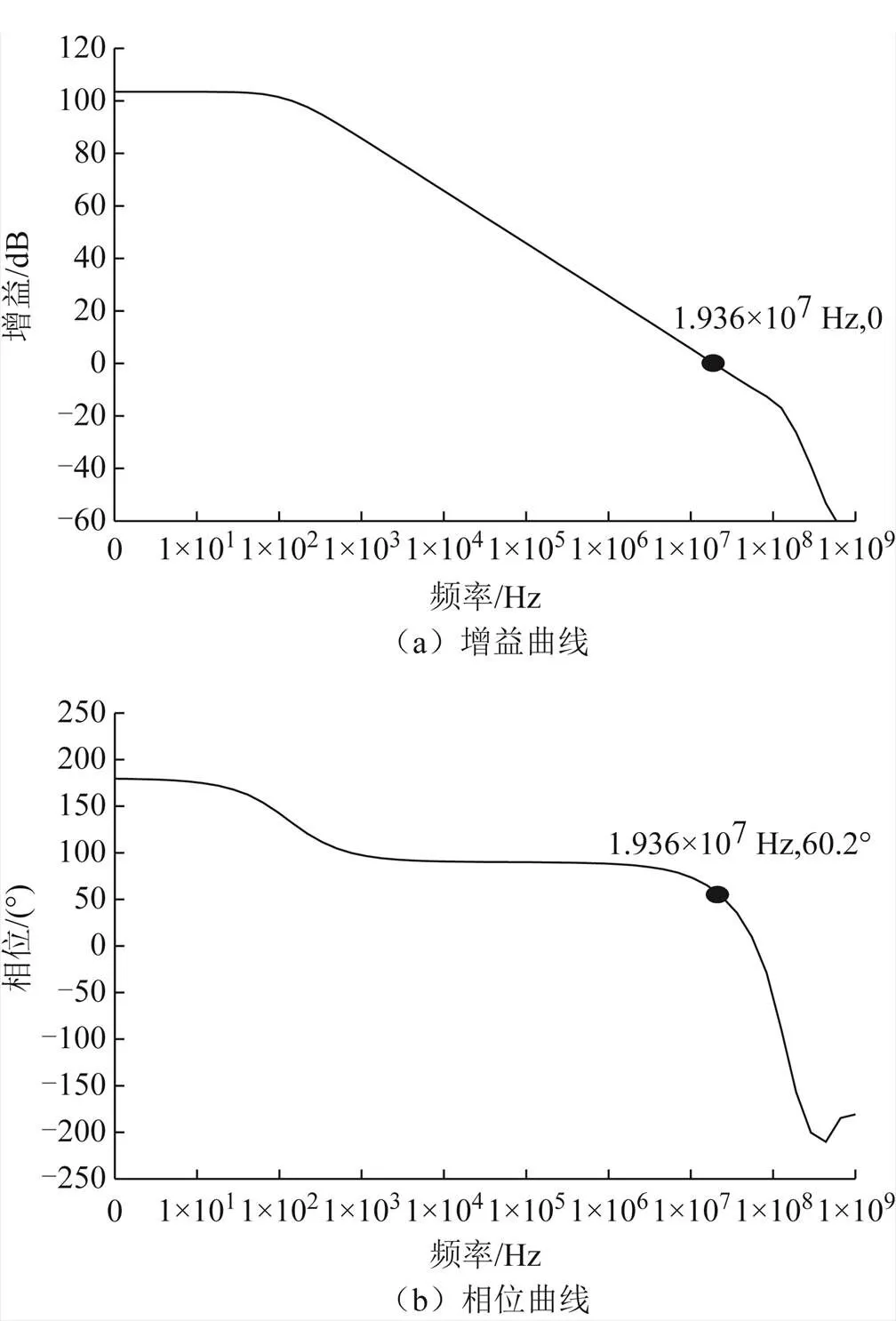
图5 1×10-4 A负载电流下LDO的幅频特性
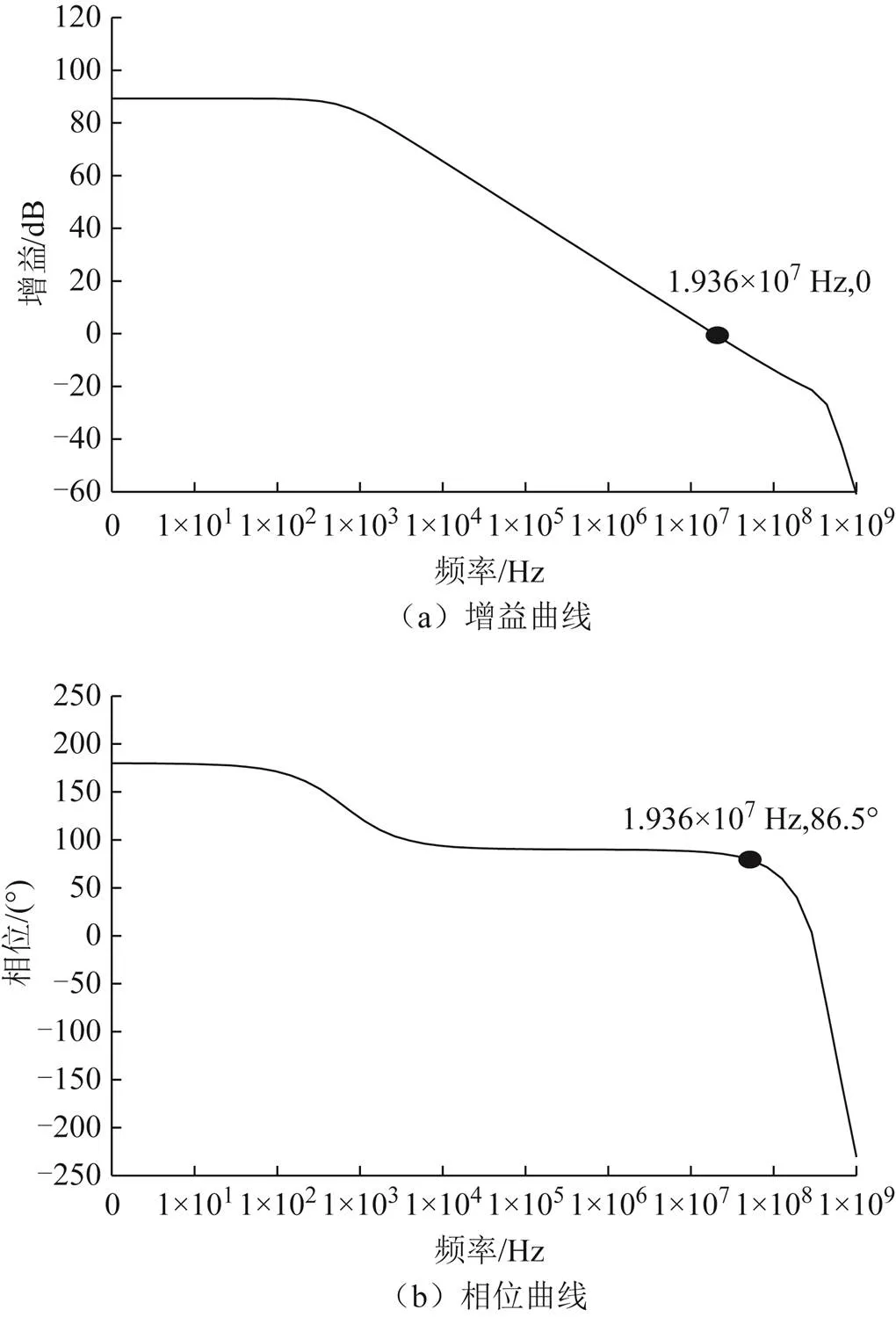
图6 3×10-1A负载电流下LDO的幅频特性
图7为1×10-4、5×10-2和3×10-1A负载电流下输出电容C从0到2×10-10F变化时,LDO的环路相位裕度变化曲线。由仿真结果可知:负载电流为为1×10-4A、输出负载电容为2×10-10F时,LDO最小相位裕度约为40°;负载电流为5×10-2A时,最小相位裕度为81°;负载电流为3×10-1A时,最小相位裕度为86°。
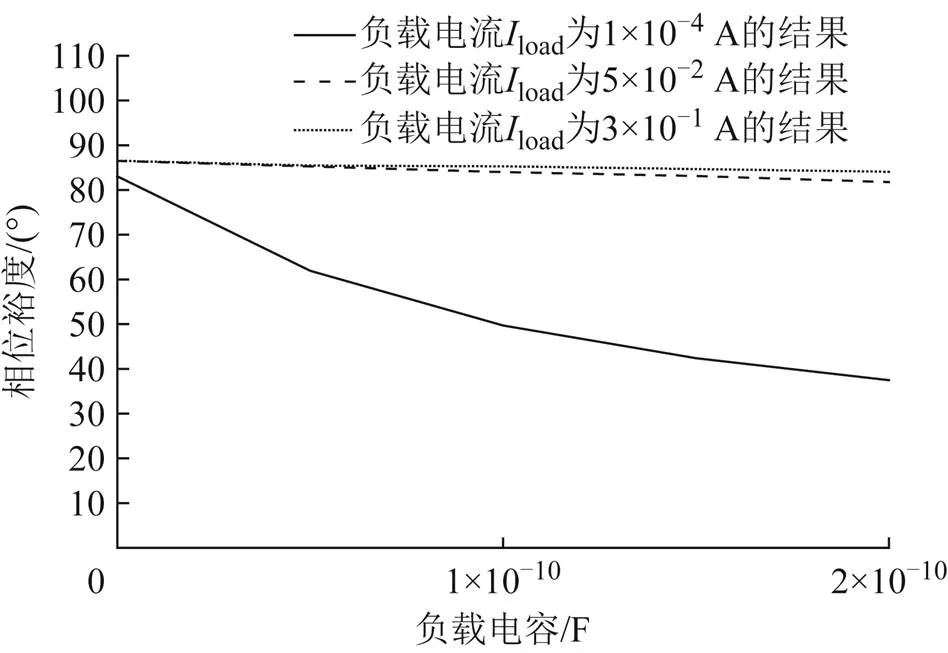
图7 不同输出负载电容时LDO的相位裕度
图8和图9分别为LDO负载电流在5×10-7s的时间内,负载电流跳变时LDO负载响应仿真曲线。仿真结果表明,LDO稳定时输出电压为2.5 V,当负载电流从1×10-4A跳变为3×10-1A,即由轻载跳变为重载时,输出电压最大下冲6.5×10-2V;当负载电流从3×10-1A跳变为1×10-4A,即由重载跳变为轻载时,输出电压最大过冲8.3×10-2V,平均响应时间约为5.3×10-7s,具有良好的瞬态响应性能。
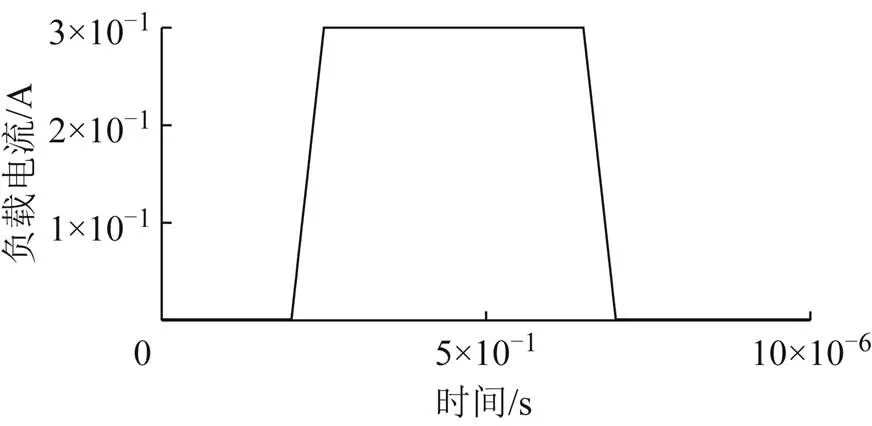
图8 LDO负载电流变化曲线
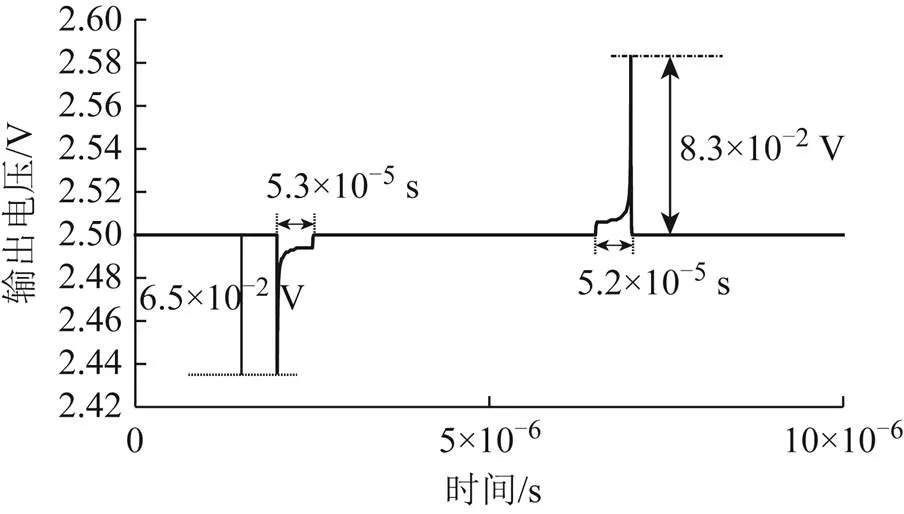
图9 LDO的瞬态响应曲线
图10为LDO的线性调整率和负载调整率的仿真曲线。仿真结果表明,LDO在2.5 V输出下,输出电压从2.8 V变化为3.8 V,线性调整率为5×10-5V;负载电流从1×10-4A变化为3×10-1A,负载调整率为9×10-6V。图11为LDO的电源电压抑制仿真曲线。仿真结果表明,LDO在1×103Hz处电源抑制比为-77.8 dB。
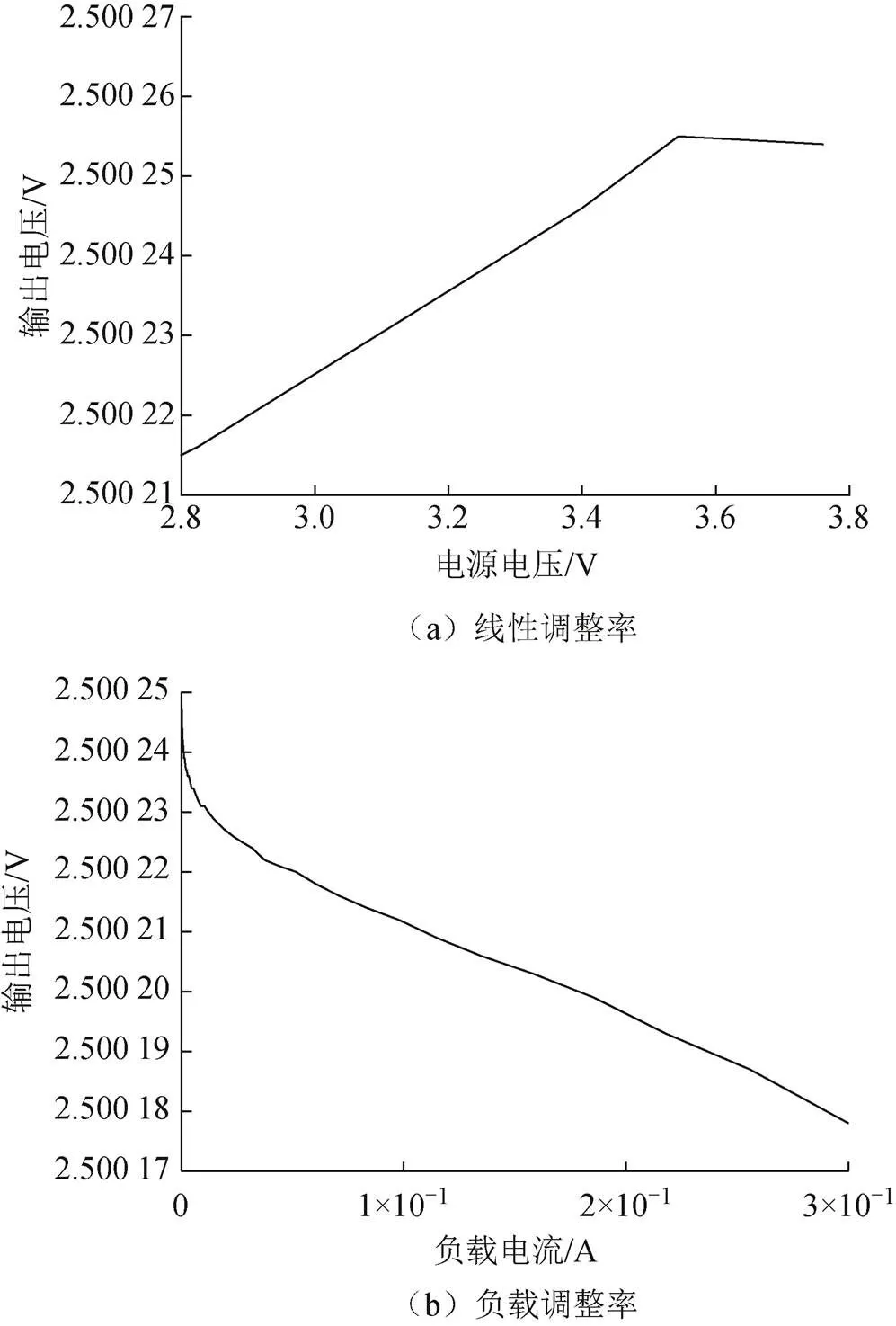
图10 线性调整率与负载调整率仿真曲线
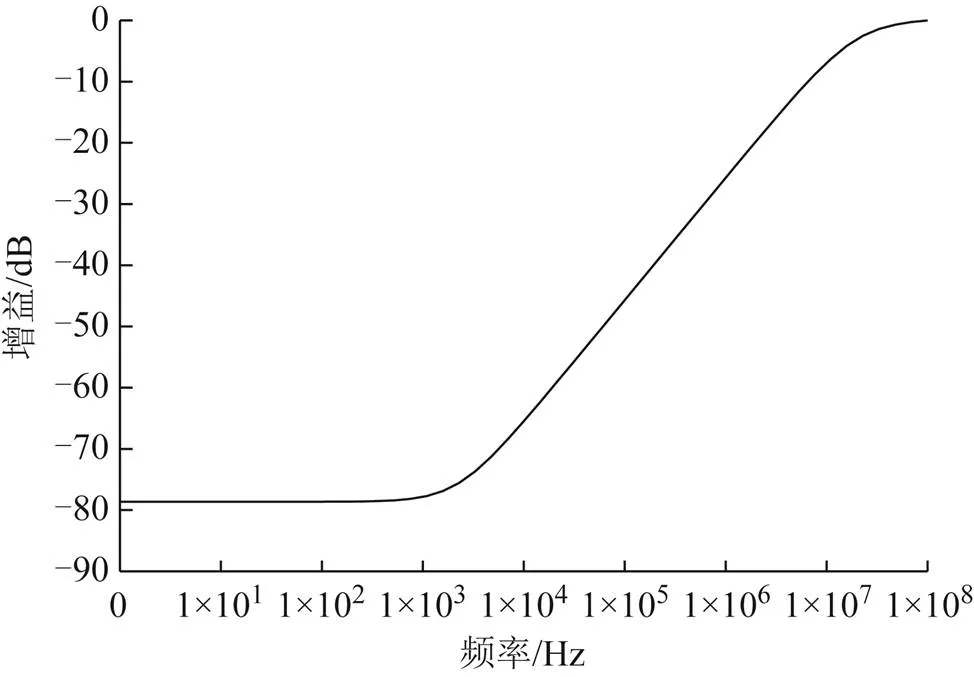
图11 电源电压抑制比
表1为本文设计的LDO与文献[9,11]2款接收机射频芯片中的LDO指标对比,从表中可以看出,本文设计的LDO具有更高的负载电流,且在瞬态响应、系统稳定性方面具有一定的优势,可满足接收机系统中电源管理单元的需求。

表1 LDO的性能比较
3 结束语
本文提出一种基于米勒补偿的全片内、快速瞬态响应低压差线性稳压器电路,通过具有阻抗衰减的缓冲级、动态零极点追踪技术实现了全负载范围内的系统稳定性。采用台积电CMOS工艺进行设计,仿真结果表明,在电压为3.3 V时,输出电压2.5 V,电路最大负载电流可达3×10-1A,全负载范围内LDO最小相位裕度为60.2°,响应时间为5.3×10-7s,可满足GNSS接收机射频芯片中的电源管理单元的设计要求,也可应用于其他片上系统。
[1] 贾栋栋, 黄海生, 李鑫, 等. GNSS接收机FLASH ADC中比较器的设计[J]. 导航定位学报, 2022, 10(1): 116-120.
[2] 何墨渊, 冯文全, 张杰斌. 一种小型化抗干扰导航接收机的系统设计[J]. 导航定位学报, 2019, 7(1): 93-97.
[3] 蔡艳辉, 胡锐, 程鹏飞, 等. 一种基于FPGA+DSP的北斗兼容型高精度接收机系统设计[J]. 导航定位学报, 2013, 1(2): 1-6.
[4] 欧阳翔, 毛毳, 陈东坡. 新型全集成CMOS射频接收器低噪声电源系统[J]. 电子测量技术, 2009, 31(1): 21-23.
[5] TANG J, LEE J, ROH J. Low-power fast-transient capacitor-less LDO regulator with high slew-rate class-AB amplifier[J]. Transactions on Circuits and Systems II, 2019, 66(3): 462-466.
[6] 康瑞, 代国定, 李沉沉, 等. 基于反嵌套共源共栅米勒补偿的LDO设计[J]. 微电子学与计算机, 2018, 35(11): 20-23.
[7] 宁志华 , 何乐年, 刘磊, 等. 一种低功耗、高稳定性的无片外电容线性稳压器[J]. 电路与系统学报, 2009, 14(2): 84-89.
[8] GWANG S K, JAE K P, GOO-HAN K. Capacitor-less low-dropout (LDO) regulator with 99. 99% current efficiency using active feedforward and reverse nested miller compensations[J]. IEEE Access, 2019, 7(10): 98630-98638.
[9] 蔡为铖. 一种集成于射频芯片的低噪声LDO设计[D]. 成都: 电子科技大学, 2017.
[10] 邝小飞, 孙丹, 李龙弟. 基于高压摆率误差放大器和摆率增强电路的无片外电容LDO[J]. 固体电子学研究与进展, 2014, 34(4): 387-391.
[11] 鲍奇兵. 集成于GPS射频芯片的LDO设计[D]. 西安: 西安电子科技大学, 2009.
[12] 茅欣彧, 汪西虎, 姚和平, 等. 基于负载跟踪技术的低漏失大电流LDO的设计[J]. 电子元件与材料, 2022, 44(1): 89-95.
Design of LDO in RF chips of GNSS receivers
GOU Jinhang, HUANG Haisheng, LI Xin, YE Xiaoyan
(School of Electronic Engineering, Xi’an University of Post and Telecommunication, Xi’an 710121, China)

global navigation satellite system (GNSS); low dropout regulator (LDO); Miller compensation; pole tracking; fast transient response; non-chip capacitance
P228
A
2095-4999(2023)01-0095-07
苟锦航,黄海生,李鑫,等. GNSS接收机射频芯片中LDO的设计[J]. 导航定位学报, 2023, 11(1): 95-101.(GOU Jinhang, HUANG Haisheng, LI Xin, et al.Design of LDO in RF chips of GNSS receivers[J]. Journal of Navigation and Positioning, 2023, 11(1): 95-101.)DOI:10.16547/j.cnki.10-1096.20230114.
2022-05-11
陕西省重点研发计划项目(2022GY-011)。
苟锦航(1997—),男,陕西宝鸡人,硕士研究生,研究方向为模拟集成电路设计。
黄海生(1964—),男,陕西榆林人,硕士,教授,研究方向为专用集成电路设计与系统研究。
猜你喜欢
现代信息科技(2022年1期)2022-06-20
现代信息科技(2022年2期)2022-06-15
防爆电机(2020年3期)2020-11-06
少年漫画(艺术创想)(2018年6期)2018-10-10
中国光学(2015年5期)2015-12-09
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
小学生·新读写(2015年2期)2015-06-10
空间控制技术与应用(2015年1期)2015-06-05
军事交通学院学报(2014年11期)2014-12-25
小学生作文选刊·低年级版(2014年11期)2014-11-21
