新能源汽车主动四轮转向稳定性控制技术
2023-03-01 10:35:44吴昊
机械与电子 2023年2期
吴 昊
(西安航空职业技术学院汽车工程学院,陕西 西安 710089)
0 引言
车辆运动时可通过主动四轮转向系统控制前后轮转角提高车辆的稳定性[1]。主动四轮转向系统控制后轮时通常将质心侧偏角设置为0,在此情况下,驾驶员的驾驶舒适感极差,因此,需要在不改变驾驶员驾驶习惯的前提下优化汽车主动四轮转向系统。在不同驾驶环境下车辆的轮胎侧偏刚度、质心位置和质量具有不确定性,因此在设计四轮转向系统时,应该将提高系统的鲁棒性作为目标。
付翔等[2]设计主动后轮转向控制器,将车辆质心侧偏角作为控制器的控制目标,并设计四轮转矩分配控制器,该控制器的目标是期望纵向车速和横摆角速度,该方法获得的横摆角速度、质心侧偏角与理想模型的差距较大,存在控制性能差的问题。毛丁丁等[3]在三自由度动力学模型的基础上分析轮胎侧偏角受路面附着产生的影响,以及车辆的动力学特性,根据分析结果设计控制器,实现四轮转向系统的稳定性控制,该方法控制车轮转角与期望转角不符,降低了车辆稳定性。
为了解决上述方法中存在的问题,提出新能源汽车主动四轮转向系统稳定性控制技术。
1 汽车模型
1.1 横向动力学模型
在车辆转向过程中,主动四轮转向系统稳定性控制方法采用线性2自由度动力学微分方程描述[4-5],即
(1)
q为新能源汽车的整体质量;χ为汽车的质心侧偏角;lf为汽车前轮在运动过程中产生的等效侧偏刚度;εr为后轮在运动过程中的转角;n为质心与后轮的距离;bx为质心对应的速度分量;t为横摆角速度;s为质心与前轮之间存在的距离;lr为后轮在运动过程中产生的等效侧偏刚度;εf为汽车前轮转角。
1.2 垂直运动模型
构建新能源汽车的垂直运动模型为
(2)
bω为车身在运动过程中的垂直振动速度;ωq为俯仰角速度;Af为弹簧在前轮处的力总和;Ar为弹簧在后轮处的力总和;Guf、Gur分别为前、后主动悬架对应的控制力;Lf、Lr为前、后悬架的刚度;x为车身垂直位移;ϑ为车身俯仰角;vf、vr为汽车前、后悬架的阻尼系数;bωf、bωr为前、后轮胎对应的跳动速度。
汽车簧上质量俯仰运动方程为
Oyωq=-sAf+nAr
(3)
Oy为车身俯仰转动惯量。
非簧上质量的垂直运动方程为
(4)
qf、qr分别为汽车前轮和后轮的质量;bgr、bgf为后轮和前轮垂直地面的输入速度;Ltr、Ltf为后悬架和前悬架对应的刚度。
xf为前悬架的车身位移,xr为后悬架的车身位移,其计算公式分别为
(5)
1.3 运动状态方程
汽车运动的集成控制状态方程为
(6)
S为系统矩阵;R为干扰矩阵;N为控制矩阵;i为控制输入;x为状态变量;e为高斯白噪声输入。
1.4 路面输入模型
在运动状态方程的基础上构建路面输入模型[6-7],即
(7)
H0为路面不平度系数;g0为下截止频率;e(t)为Gauss白噪声,其均值为0。
在上述模型的基础上获得后轮对应的输入为
(8)
υ为前轮和后轮的激励时间差。
2 四轮转向系统稳定性控制
新能源汽车主动四轮转向系统稳定性控制方法通过设计集成控制器完成系统稳定性的控制。
利用PD控制器控制新能源汽车电动助力转向系统[8-9],即
(9)
Ym为转向系统中电机作用产生的助力距;H1为转向轴与电动机之间存在的转动比;La为电动机对应的转矩系数;B为电动机电压;Lb为反电动势常数;ε1为小齿轮转角;LP为比例系数;Yc为转向盘操纵转矩;LD为微分时间常数。
转向集成与主动悬架控制器由2部分构成,即
(10)
gLi为线性控制力;gNi为非线性控制力;nLi为线性控制增益。
通过自适应模糊控制器得到非线性控制力[10-11],在传统控制器中,控制规则是不可调的,新能源汽车主动四轮转向系统稳定性控制方法将可调因子s引入模糊控制器中,即
(11)
I为控制器的输出量;RiV为偏差变化率;Ri为偏差;Hu(e)为目标函数,符合钟形分布。
调整因子当偏差变化不明显时,在大范围内发生变化的概率极低,在此背景下保证了控制规律的稳定性;调整因子当偏差变化较为明显时,可在短时间内变化,提高了控制系统的稳定性。


图1 汽车主动四轮转向系统控制原理
3 实验与分析
为了验证新能源汽车主动四轮转向系统稳定性控制方法的整体有效性,构建新能源汽车主动四轮转向系统的理想模型。
构建理想状态下的二自由度车辆状态方程为
(12)
m为新能源汽车的质量;zfd为前轴与质心之间存在的固定距离;Oz为在z轴中存在的转动惯量;ix为质心处产生的纵向速度。
本次测试的新能源汽车参数如表1所示。

表1 车辆基本参数
采用新能源汽车主动四轮转向系统稳定性控制方法、文献[2]方法和文献[3]方法控制汽车主动四轮转向系统,并将控制结果与理想控制模型对比,根据对比结果,测试不同方法的控制精度。
3.1 横摆角速度
不同方法的横摆角速度如图2所示。

图2 不同方法的横摆角速度
由图2可知,本文方法控制汽车主动四轮转向系统时获得的横摆角速度与理想模型一致,文献[2]方法和文献[3]方法获得的横摆角速度与理想模型存在较大差距,表明本文方法可更加有效地控制汽车的主动四轮转向系统。
3.2 质心侧偏角
不同方法的质心侧偏角如图3所示。

图3 不同方法的质心侧偏角
由图3可知,本文方法的质心侧偏角曲线与理想模型的变化曲线基本相符。
3.3 车轮转角
不同方法的车轮转角如图4所示。
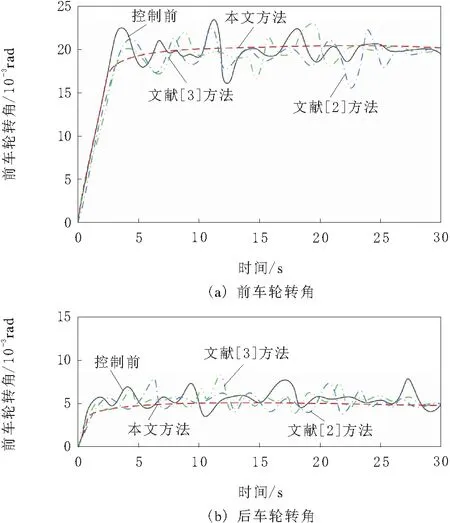
图4 不同方法的车轮转角
由图4可知,对汽车主动四轮转向系统控制前,前后轮的转角波动变化较大,采用本文方法对其控制后,前轮转角和后轮转角趋于平稳。
3.4 车身侧倾角
将车身侧倾角作为指标进一步验证本文方法、文献[2]方法和文献[3]方法的有效性。不同方法的测试结果如图5所示。
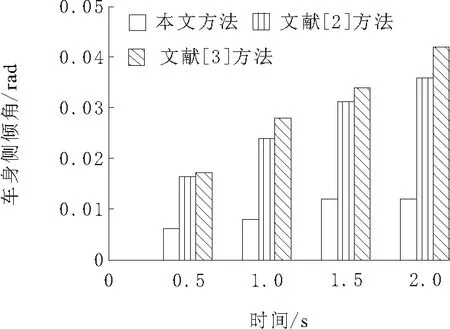
图5 车身侧倾角
由图5可知,随着时间的增加本文方法、文献[2]方法和文献[3]方法的车身侧倾角不断增加,但在相同时间内本文方法的车身侧倾角低于文献[2]方法和文献[3]方法,且本文方法在测试过程中,将车身侧倾角控制在0.02 rad以内,表明其具有较高的稳定性。
4 结束语
针对汽车主动四轮转向系统稳定性控制方法存在控制性能差的问题,提出汽车主动四轮转向系统稳定性控制方法,在控制过程中引入了可调因子,可以在不同环境中调换不同的控制规则,使方法适用于不同的环境,提高了方法的控制性能。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06 03:36:14
汽车实用技术(2022年14期)2022-07-30 06:24:26
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
民用飞机设计与研究(2020年4期)2021-01-21 09:15:46
新课程·中学(2019年7期)2019-09-17 13:41:15
小学生学习指导·爆笑校园(2019年6期)2019-09-10 04:06:25
物理教学探讨(2018年1期)2018-02-13 09:26:52
红蜻蜓·低年级(2015年11期)2016-02-02 11:04:45
航天器工程(2014年5期)2014-03-11 16:35:53
小猕猴智力画刊(2013年6期)2013-04-29 00:44:03